Daniel Wiegert
Daniel Wiegert-
Working on integratin OpenMower project
05/15/2022 at 07:55 • 0 commentsHello all, I am getting quite a few PMs about this project.
I recently started programming again with the goal of making the firmware able to talk to OpenMower. https://github.com/ClemensElflein/OpenMower
The code on my GitHub is NOT READY YET. At the moment lpc1788 version of the code compiles but not the lpc1768. I am prioritizing LPC1788 at the moment but then that is somewhat ready for use I will start looking at the lpc1768 code again.
Pinout diagram can be found at https://github.com/Damme/LandLord
edit; spelling
-
Not the update you all wanted I guess..
09/28/2021 at 10:51 • 0 commentsHello all!
First of all, Sorry for not answering you guys at all more or less. Also, I just noticed the link is bad to the io diagram so here is the link again:
https://drive.google.com/file/d/0B98aBL1DeE4uc3hLQUhHa1FXUGs/view?usp=sharing&resourcekey=0-qmhrLCdqSrvEi-HP7xEJggAnd the progress? Well there is none. I didn't have energy or time to continue at the time and I also hoped that competition in the market would make the machines better. Not WORSE what I can see they went. So in my eyes the competition only made companies want more profit from existing customers... Sadly..
I also made some progress with DB504 model. I made both 504 & 275 able to move around, start stop mower, start stop charging etc. but this is where I stopped.
There are techniques to have GPS based navigation down to a few cm position (With RTK gps base station etc)
I am pretty sure it would be possible to program a simple map only with compass and length meter too, it wouldn't be precise at all but I'm sure basic navigation with this technique would be possible, especially with the modern mcu:s that has a lot of compute power.So where am I with this project today?
I am still interested in developing a new firmware. Especially since no progress have been made at all what I can see in the market..Worx still seems pretty cheap and rather easy enough. I don't have any motherboards from the later year models at all. Hopefully they haven't changed much at all but I have no idea.
So if anyone out there would like to dokument, take hi res photos (Without a potato camera please!) I might be able to cross reference the different models. If I would continue this it would not be very smart to use a soon 8 year old robot for this. but if the motherboards are close enough the code could be somewhat universal.
Hopefully some of you that are truly interested in this project developing a new firmware are getting this message and maybe we can figure something out together.//Daniel
-
Battery
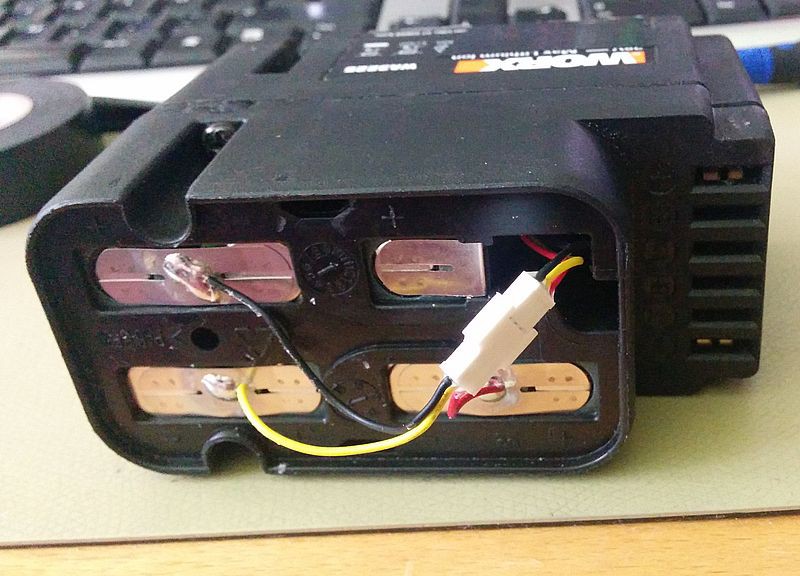
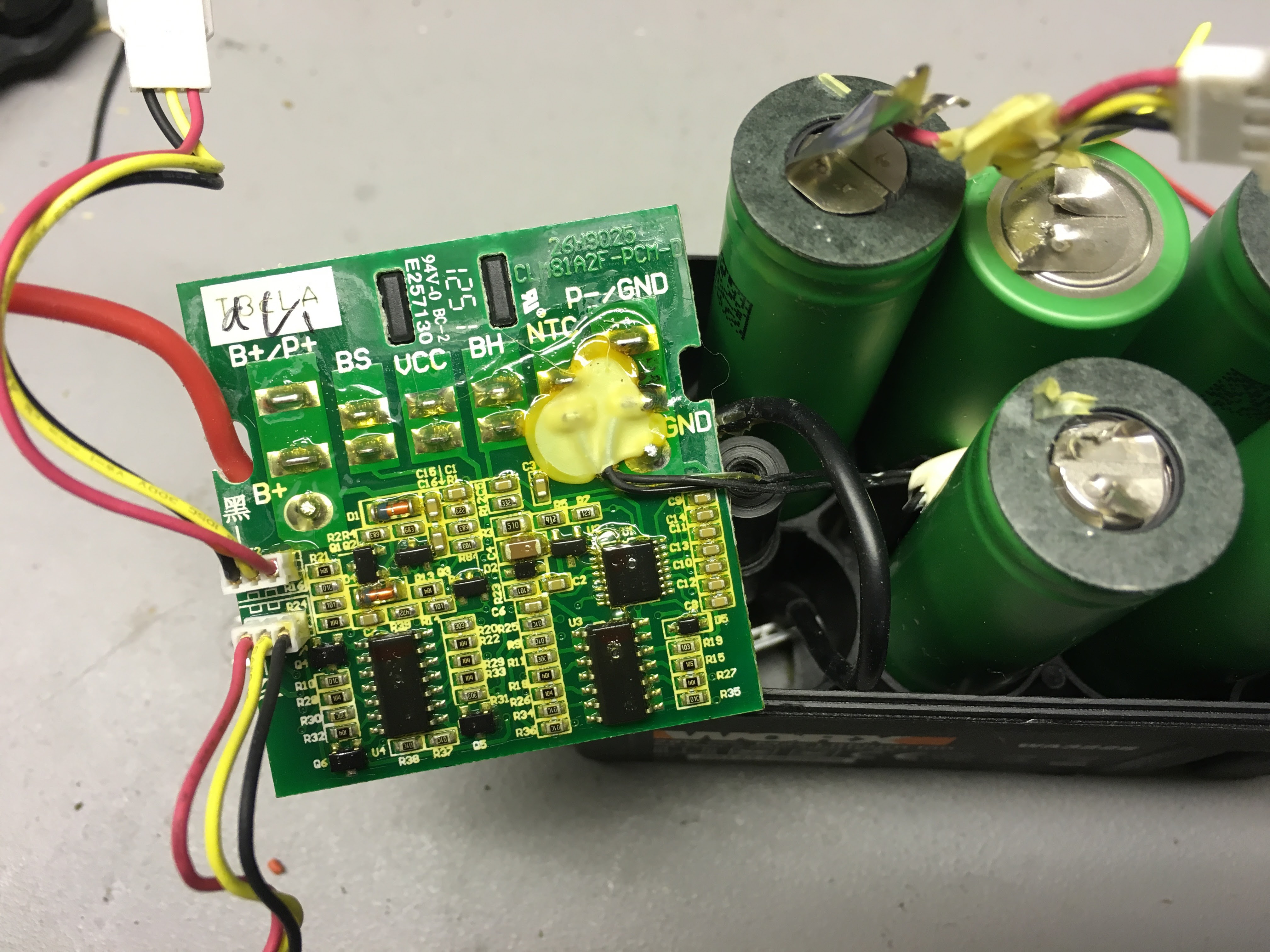
07/21/2016 at 20:50 • 3 commentsThere have been some discussion over batteries and charging down in the comments. I'll publish images of inside of battery.
The tabs are solders After case is screwed together. So to split it you need to cut the connecting tabs on one side...
Cells are Sony 18650 1900mAh. Thanks to Jan B!
![]()
![]()
![]()
-
Unpacker for firmware .pck
07/19/2016 at 19:09 • 6 commentsWarning etc etc, use with caution... Might contain bugs :)
#!/usr/bin/python3.5 import sys if len(sys.argv) <2: print( "usage:" ) print(" " + sys.argv[0] + " [.PCK file]", "[Folder-prefix]" ) print( " " ) exit() import os from binascii import crc32 from struct import unpack #get unpack file src_file_path = sys.argv[1] #read file length src_file_size = os.path.getsize(src_file_path) #read file b = bytearray(open(src_file_path, 'rb').read()) # crude bytearray to String converter def toStr(b): return "".join(["%c"%i for i in b]).strip("\x00") # convert 4 bytes to int def word2int(w): return unpack("<I", w)[0] # crude filetable parser def getHeader(b, datastart): beginstart=b.find(63) #"?" filename = toStr(b[0:beginstart]).replace("\\","/") beginstart+=1 beginlength=b.find(63,beginstart) #"?" start = int(b[beginstart:beginlength],16) + datastart + 4 beginlength+=1 length = int(b[beginlength:beginlength+10],16) return { "filename": filename, "start" : start, "length" : length, } #crude way to create nonexisting directories def checkCreateDir(filename): if not os.path.exists(os.path.dirname(filename)): try: os.makedirs(os.path.dirname(filename)) except OSError as exc: # Guard against race condition if exc.errno != errno.EEXIST: raise def save(filename, data): checkCreateDir(prefix + "/" + filename) #create missing directories print ("writing %s\t (%d bytes)"%(filename,len(data))) open(prefix + "/" + filename, 'wb').write(data) ## Start decoding print("Unknown byte 0:\t"+ str(b[0])) print("Unknown byte 1:\t"+ str(b[1])) print("Unknown byte 2:\t"+ str(b[2])) print("Unknown byte 3:\t"+ str(b[3])) prefix = sys.argv[2] if len(sys.argv)>=3 else "." headerstart_token = bytearray((int(62), int(0x0d), int(0x0a))) headerstart = b.find(headerstart_token,0)+3 pos=headerstart datastart_token = bytearray((int(0x0d), int(0x0a), int(0x0d), int(0x0a))) datastart = b.find(datastart_token,0) print("header end: \t"+ str(datastart)) nHeaders = b.count(int(13),4,datastart) print("# files \t: "+str(nHeaders)) # crude way to parse the directory table files = [] print ("found %i files\n"%nHeaders) token = bytearray((int(0x0d), int(0x0a))) for i in range(nHeaders): pos2=b.find(token,pos) h = getHeader(b[pos:pos2], datastart) files.append(h) print(h) pos = int(pos2)+2 for h in files: bFile = b[h["start"]:h["start"]+h["length"]] #write stripped file save(h["filename"],bFile) print("Done!") -
Help identifying component (solved)
07/06/2016 at 08:24 • 4 commentsThe right one, its a ST L3GD20H, Thanks Ajlitt!
Left is MMA8452Q, 3-axis, 12-bit/8-bit digital accelerometerhttp://www.nxp.com/files/sensors/doc/data_sheet/MMA8452Q.pdf![]()
-
Pinout DB504
06/27/2016 at 19:57 • 3 comments![]()
![]()
-
Different motherboards.
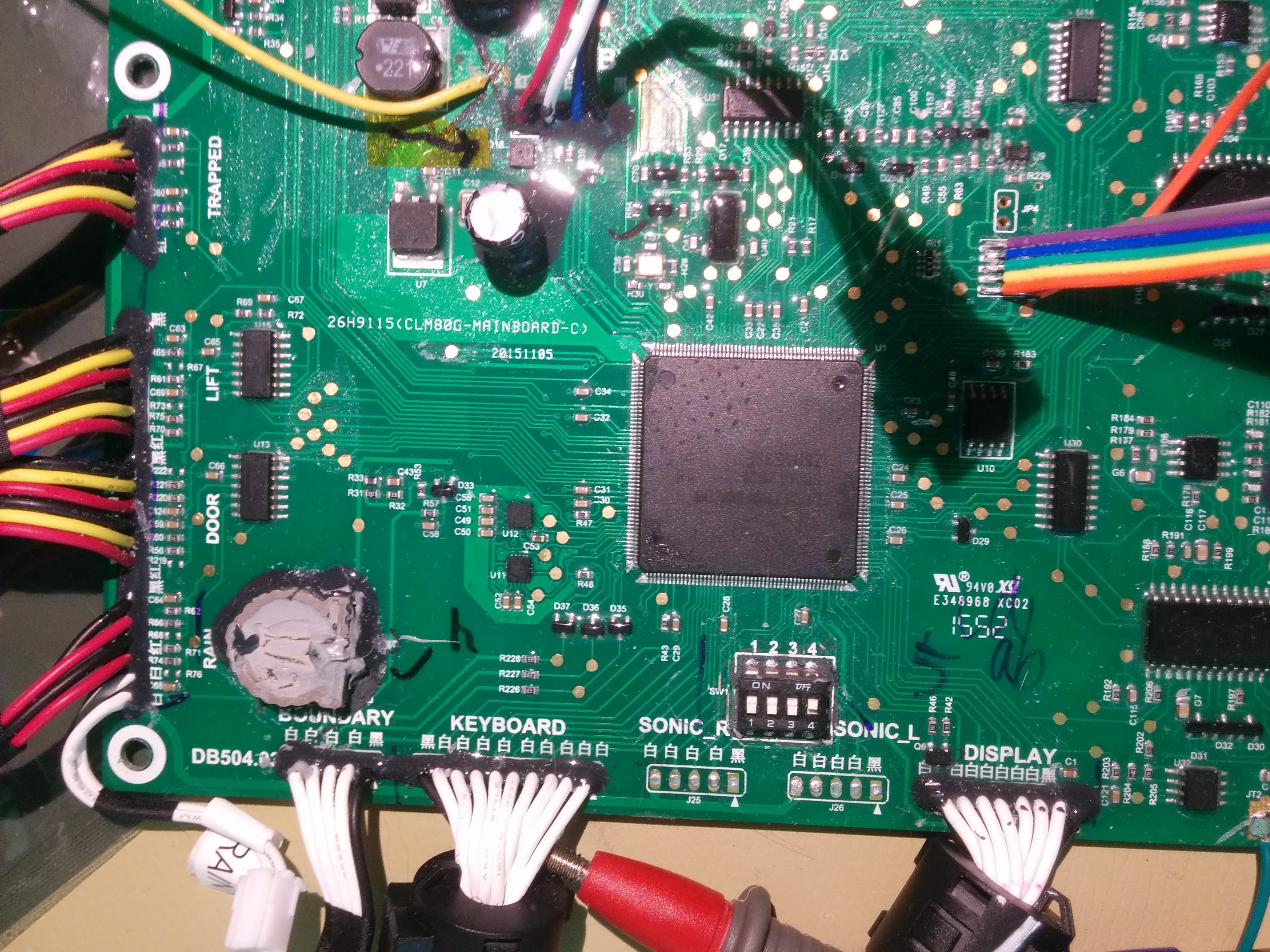
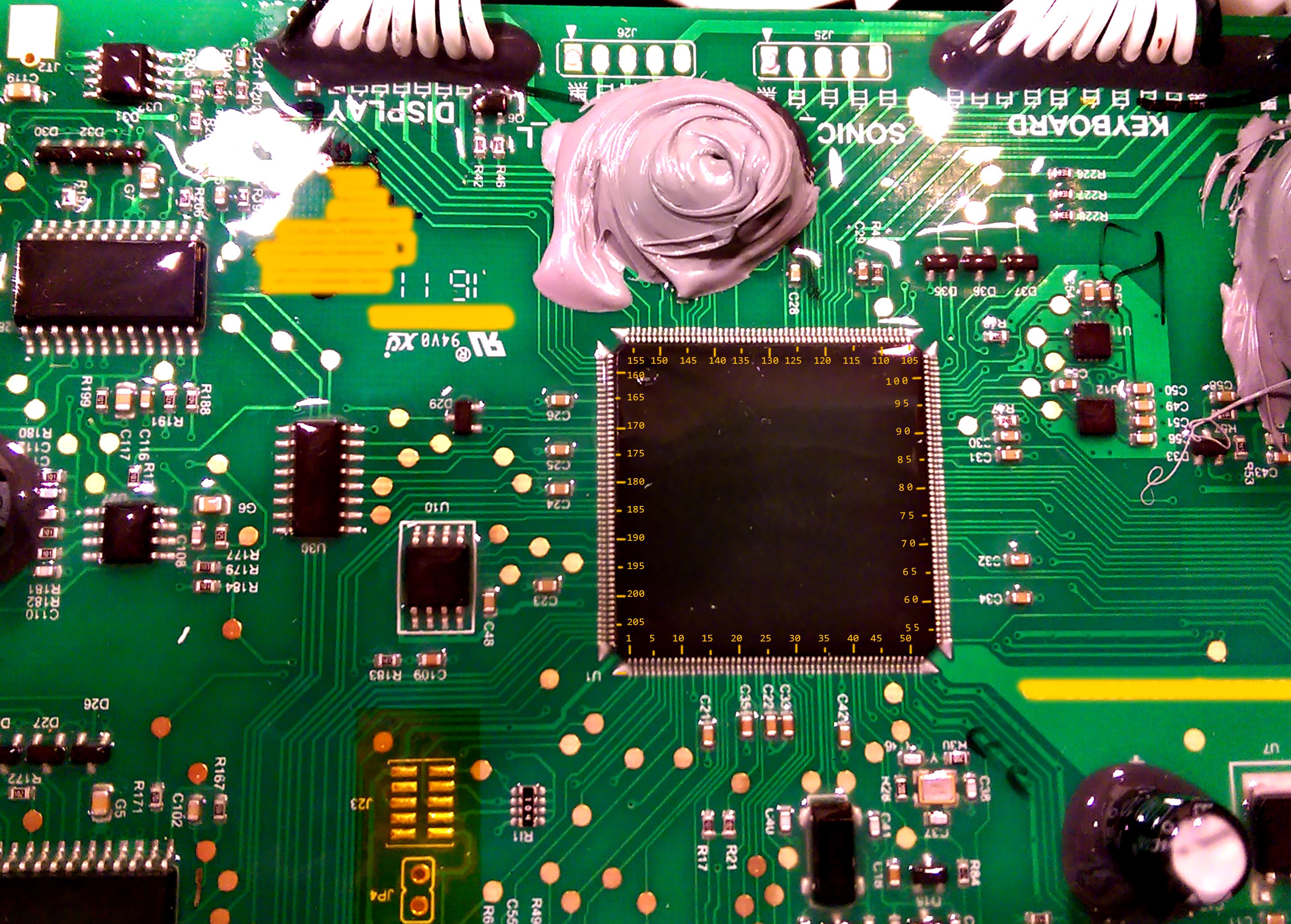
06/20/2016 at 21:16 • 2 commentsI've been working on mapping 2016 year model of worx, they use DB504 motherboard. Usually .pck-firmware, its a container and the start is plain-text. It's possible to do a splitter for that but I use dd to copy out the firmware.
DB504 probably use LPC1788. I've been looking on some io's on a picture I've recieved and it seams to be correct. (not possible to read chip text without removing the conformal coating)
My guess so far is U10 = spi flash. U11 + U12 compass / accelerometer / gyroscope. Yellow tape protects JTAG from the coating![]()
Display and Keyboard are the same as previous models. Wire sensor uses a daughter board:
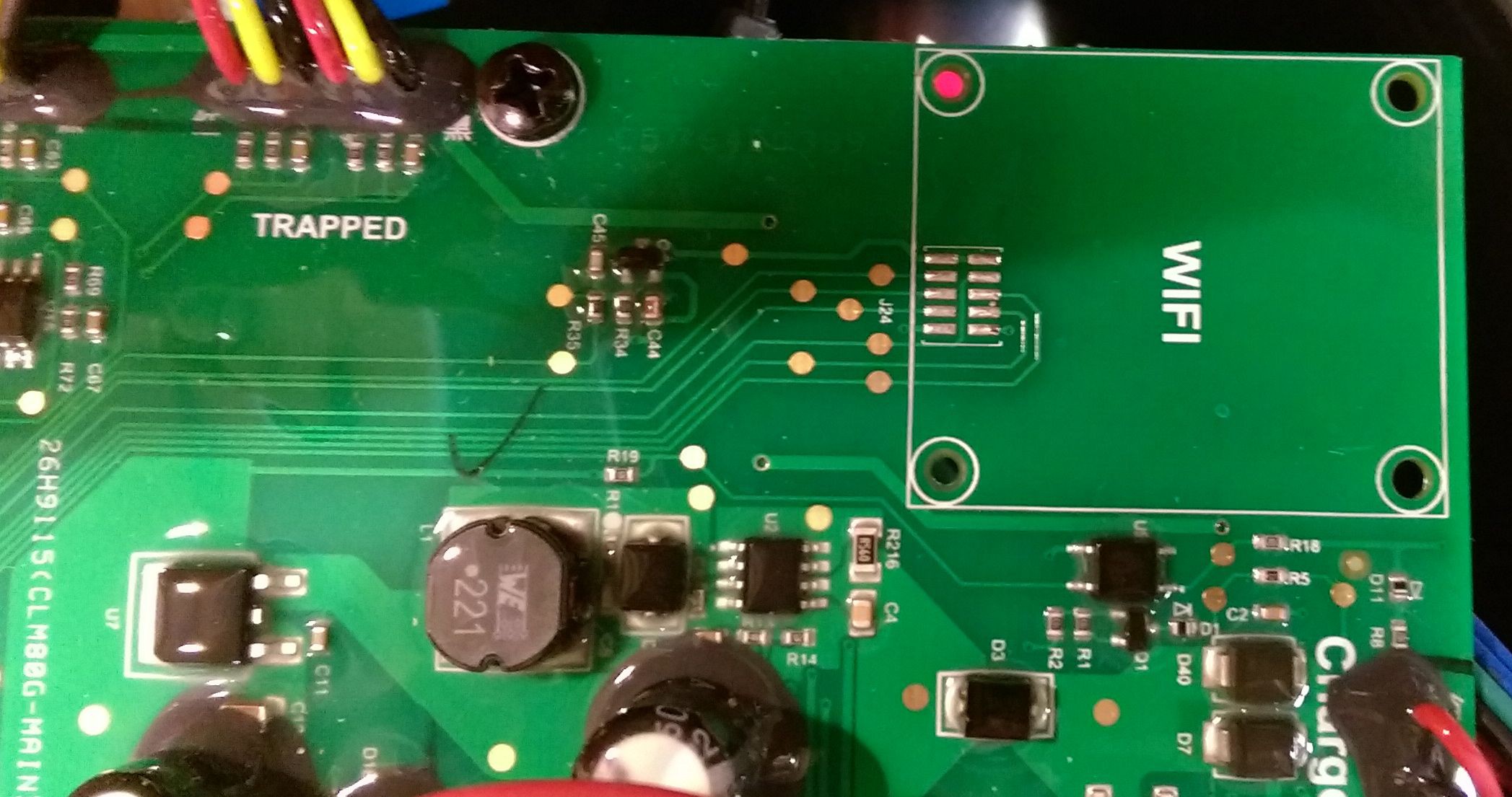
Should we assume they still uses LPC and that this might be an LPC11U6x?
Wifi module are supplied from http://www.redpinesignals.com/, uses SPI (SSP0) communication. easy to mod! :)![]()
( https://www.ghielectronics.com/catalog/product/282 looks like a suspect...)
![]() So far I've been developing and reversing DB275 (2015 WG790/791/794) It seams all 2016 has DB504.
So far I've been developing and reversing DB275 (2015 WG790/791/794) It seams all 2016 has DB504.WG796e (2015) uses DB297 which I haven't seen yet. So if any one wants to send in pictures of that motherboard it would be very appreciated!
I don't know much about earlier versions.
//Daniel
edit:
![]()
-
Some / Slow progress
06/07/2016 at 09:05 • 2 commentsI had a small break, I let the mowers do their job outside! :)
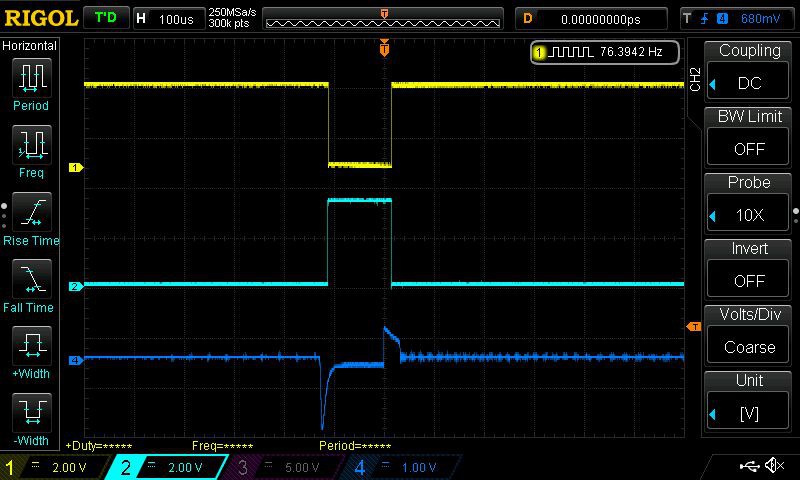
I've figured out the boundary wire and how it works. I finally got the idea to use the USB d+ and d- (p0.29 + p0.30) and output of p0.7 - p0.10 and measure with oscilloscope.. :) (4 wire inputs -> raising and falling each on pos / neg)
The blue is probe directly on the boundary wire.
![]()
![]()
So if negative measurement is before or after the positive, then you know if you are inside or outside wire.
p0.21 select amplification or something, you can detect if you are within 1 meter of the wire or not.
p0.22 probably selects between left and right sensor.
And if you are close to the sensors you get some weird artifacts in the measurement, longer pulse, and even more than one pulse. It seams this is following a pattern and it might be possible to user and detect the distance to the wire at 0cm, 10cm, 20cm and 100cm.
![]()
And the last one, wire right on top of the sensor.
![]()
-
Original firmware?
05/06/2016 at 12:32 • 4 commentsI could use some owners help. I would like to have your firmware-files!
I need to see how big of a difference it is between models.Please contact me!
Thanks all!
-
Pinout!
05/03/2016 at 08:14 • 0 comments95% of the pin-out is finished. There are some questions still to be answered. Also the models with WIFI, How do they look inside? I would love to see some pictures of the main board in that one!
One guess would be that the un-populated IC nead RTC battery is a SPI flash but not confirmed.
Next important step would be to understand the how the wire sensor works.
P0.0 GPIO Output, Motor Left, Select Forward/Reverse P0.1 GPIO Input, Dip switch 3 P0.2 ADC6, Motor Right, Current ?? -> Need more investigation P0.3 ADC7, Motor Left, Current ?? -> Need more investigation P0.4 + P0.5 GPIO Output, Selector ADC4 input -> accelerometer LIS352AR pin S0, S1. 0 0 - ADC4 = X 0 1 - ADC4 = Y 1 0 - ADC4 = Z 1 1 - ADC4 = aux (temp batt) P0.6 GPIO Output, Speaker High volume P0.7 GPIO Input, ExtInt3 Raising edge - Wire sensor -> Need more investigation P0.8 GPIO Input, ExtInt3 Falling edge - Wire sensor -> Need more investigation P0.9 GPIO Input, ExtInt3 Raising edge - Wire sensor -> Need more investigation P0.10 GPIO Input, ExtInt3 Falling edge - Wire sensor -> Need more investigation P0.11 GPIO Output, Enable Charging (in charger, after P1.23 is set to 1) P0.15 SPI SCLK, LCD P0.16 SPI CSB, LCD P0.17 SPI MISO, LCD <- Unused? NC? P0.18 SPI SDA, LCD P0.19 SPI RSTB, LCD P0.20 SPI A0, LCD P0.21 GPIO OUTPUT, Selector Guide Wire sensor, Range / Amplification P0.22 GPIO OUTPUT, Selector Guide Wire sensor, Unknown function -> Need more investigation P0.23 ADC0, Charge current? (Or Charge voltage, Only >0 then charging) P0.24 ADC1, Voltage Battery P0.25 ADC2, Accelerometer, Sideways (X/Y) P0.26 ADC3, Accelerometer, Forward (X/Y) P0.27 GPIO Input, Motor Rotor, Rotation tick? -> Need more investigation P0.28 GPIO Input, Charger state? Battery full? -> Need more investigation P0.29 USB D+, Maybe used for softUART for GPS / External mcu communication P0.30 USB D-, Maybe used for softUART for GPS / External mcu communication P1.0 GPIO Input/Output, Keypad matrix Row1 P1.1 GPIO Input/Output, Keypad matrix Row2 P1.4 GPIO Input/Output, Keypad matrix Row3 P1.8 GPIO Input/Output, Keypad matrix Row4 P1.9 GPIO Input/Output, Keypad matrix Col1 P1.10 GPIO Input/Output, Keypad matrix Col2 P1.14 GPIO Input/Output, Keypad matrix Col3 P1.15 GPIO Input/Output, Keypad matrix Col4 P1.16 GPIO Input, Hall Sensor, Lifted P1.17 GPIO Input, STOP Button P1.18 Unknown, NC? P1.19 Unknown, NC? P1.20 GPIO Output, LCD Backlight ON, PWM1.2 can be used here if motors are inactive. (Pulsing screen then charging) P1.21 GPIO Input, High then connected to charger and charger is RED P1.22 Unknown, NC? USB Power on?? P1.23 GPIO Output, Initiate Charger, Keeps charger in RED mode. if low charger shows green light. P1.24 GPIO Output, Speaker Low volume P1.25 GPIO Output, Keep high for PCB Power on. P1.26 Unknown, NC? Sensor? P1.27 Unknown, NC? Sensor? P1.28 GPIO Input, Power key, Normal HIGH P1.29 GPIO Input, Sensor, Rain P1.30 ADC4, Output from LIS352AR, Selected by P0.4 + P0.5 P1.31 ADC5, Motor Rotor, Current ?? -> Need more investigation P2.0 PWM1.1, Motor Right speed P2.1 PWM1.2, Motor Left speed P2.2 PWM1.3, Motor Rotor speed P2.3 GPIO Input, Dip switch 2 P2.4 GPIO Output, Motor Right, Enable/Start | Disable P2.5 GPIO Output, Motor Right, Brake ON/OFF P2.6 GPIO Output, Motor Right, Select Forward/Reverse P2.7 GPIO Input, Dip switch 3 P2.8 GPIO Output, Motor Left, Brake ON/OFF P2.9 GPIO Output, Motor Left, Enable/Start | Disable P2.10 GPIO Input, EInt0??, Sens Motor? Error? -> Need more investigation P2.11 GPIO Input, EInt1 Edge, Motor Right Rotation tick P2.12 GPIO Input, EInt2 Edge, Motor Left Rotation tick P2.13 GPIO Output, Motor Rotor, Enable/Start | Disable P3.25 GPIO Output, Motor Rotor, Brake ON/OFF P3.26 GPIO Output, Motor Rotor, Select Forward/Reverse P4.28 GPIO Input, Hall Sensor, Cover P4.29 GPIO Input, Hall Sensor, Front
Project 'Landlord'
Open source firmware for Worx Landroid robotic mower.





 So far I've been developing and reversing DB275 (2015 WG790/791/794) It seams all 2016 has DB504.
So far I've been developing and reversing DB275 (2015 WG790/791/794) It seams all 2016 has DB504.