Jay Doscher
Jay Doscher-
Suspending Work
08/24/2015 at 18:29 • 0 commentsI have unfortunately have not made the cut for the Hackaday 2015 Prize. I am suspending work on the project indefinitely, but you can see all my work files here on Github (https://github.com/polyideas/Raspberry-Pi-Solar-Tracker). You can also reach me at jay@polyideas.com if you have interest in the project or would like to contribute.
Thanks,
Jay
-
Code updated on Github
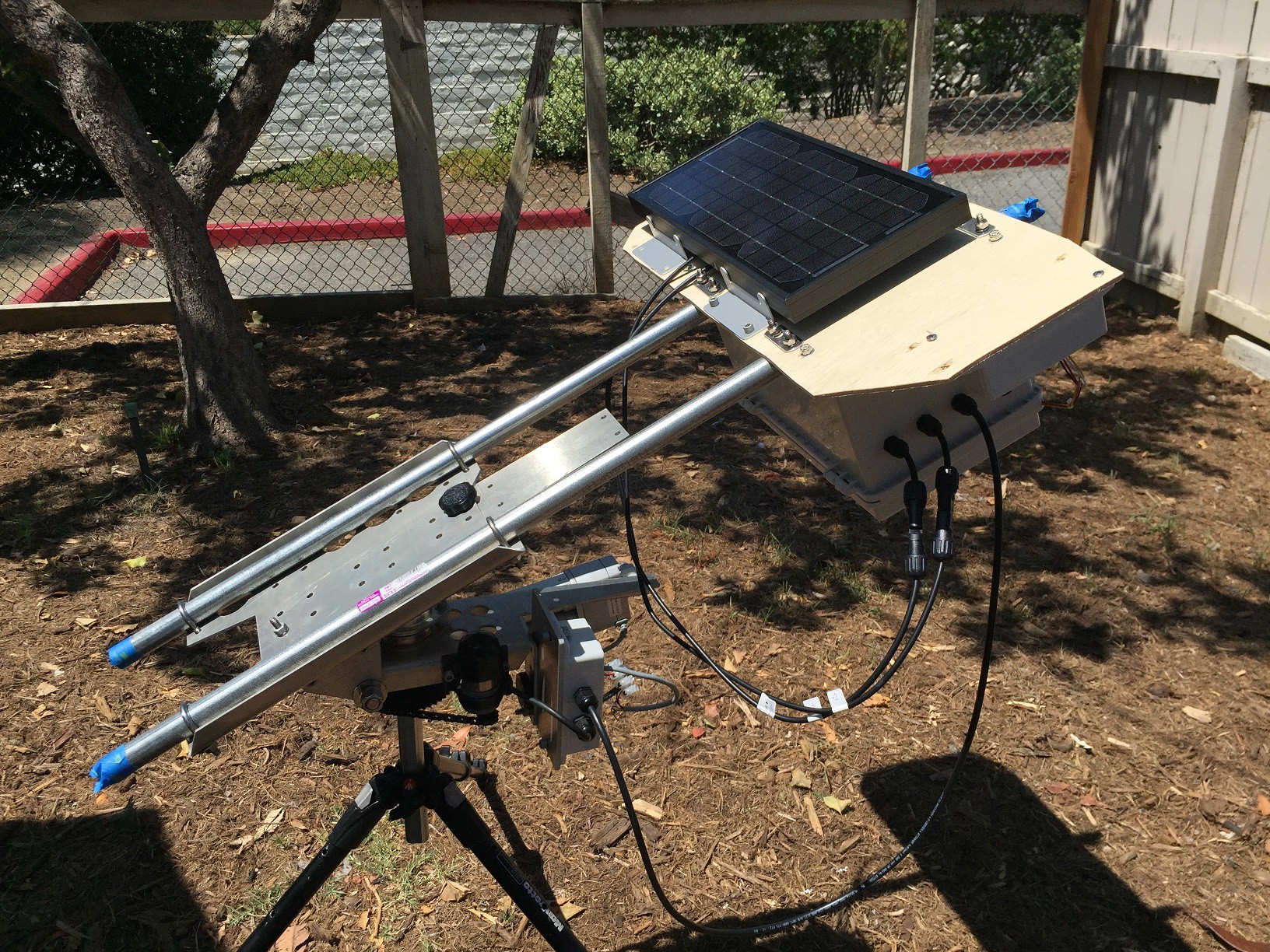
08/23/2015 at 22:39 • 0 commentsI've published all of the core components on Github, including the web control panel. I've also moved to the smaller 10W solar panel and I'm currently using plywood to test a new component layout. The IMU is too unreliable inside the main enclosure, so it's been moved outside. This will increase component cost from the additional enclosure, the cable glands, cable, etc. but it seems unavoidable. You may notice that the lower bracket is empty- this is where the main panels will go later- the small setup you see here is tracking setup only.
![]()
-
IMU fixed
08/19/2015 at 18:29 • 0 commentsI've updated the layout internally, keeping the IMU away from the Raspberry Pi. We seem to be getting good readings, and the tracker is following the sun. Next up on the to-do list:
- Add the cable glands for the solar connectors
- Replace the makeshift solar connectors with proper ones
- Rewire the panning motor with new cable, connect to main box
- Connect the linear actuator to the main box
- Remove the motor junction box
- Create the wood mock-up for the tracker solar panel
- Attach the main box and solar panel to the wood bracket
- Resize/modify the bracket design as needed
- Order the new aluminum bracket
- Never-ending code optimization
- Clean up design files
![]()
![]()
-
Disabled Wi-Fi Power Saving
08/17/2015 at 22:34 • 0 commentsIt looks like the Edimax Wi-Fi adapter likes to go into low power mode, which has been creating issues for the robot today. Here' a link on how to fix it. (link)
-
New IMU placement
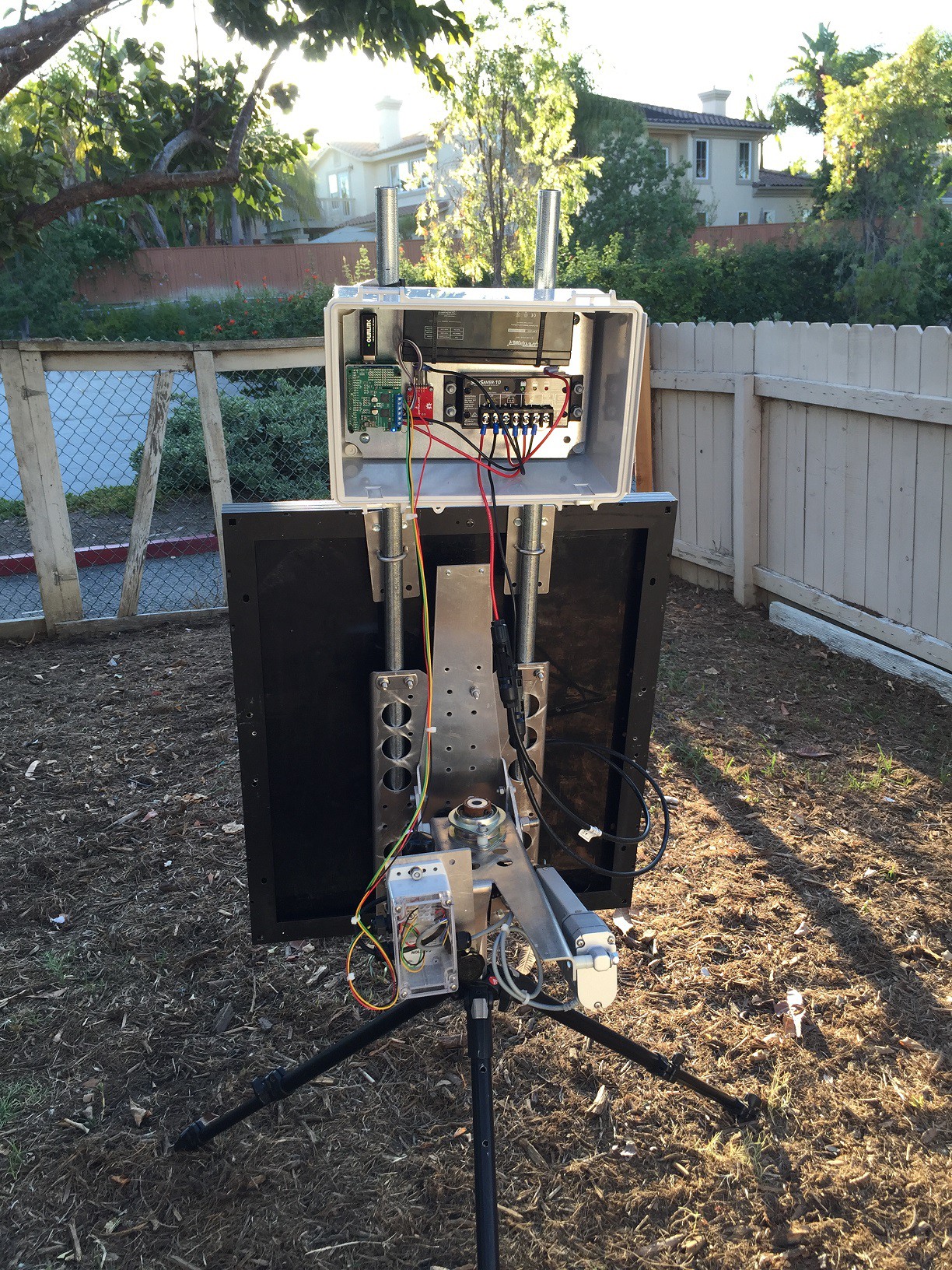
08/17/2015 at 18:22 • 0 commentsWe've moved the IMU outside the enclosure and we're back to getting accurate readings. Here's a shot of the new setup. We'll take another shot at rearranging the components tonight, as two enclosures increases cost and parts count. You can see our fancy painter's tape holding the smaller enclosure in place.
![]()
-
New hardware deployed
08/17/2015 at 02:54 • 0 commentsI've deployed new hardware, and you can track it on Twitter at @solarbot7. I think the IMU may still be too close to the electronics, as I am getting some funny behavior this evening. Since the robot sleeps (set to inaction) overnight, I should know more tomorrow. The IMU may have to go in an external housing or spaced out further from the other electronics. You'll notice that the lower cases are gone (still on Twitter as @fieldunit), so the wire tangling issues should be behind us for now.
![]()
Here's a photo of the old configuration and the tangled wires- not good! It breaks stuff when it does this.
![]()
-
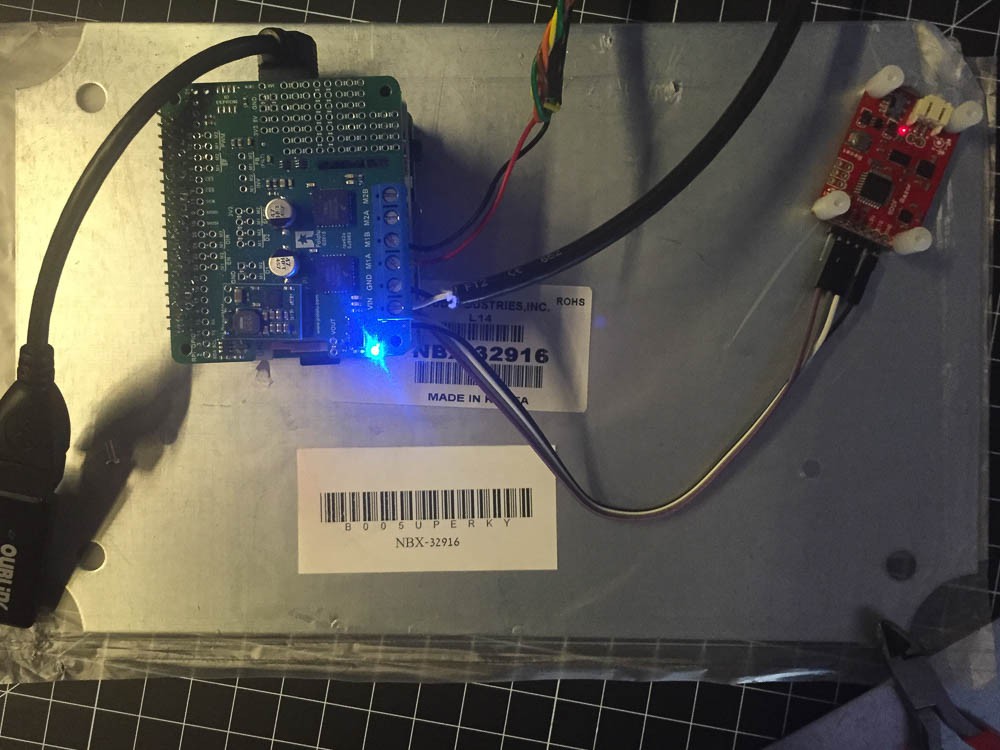
Revision B Installed
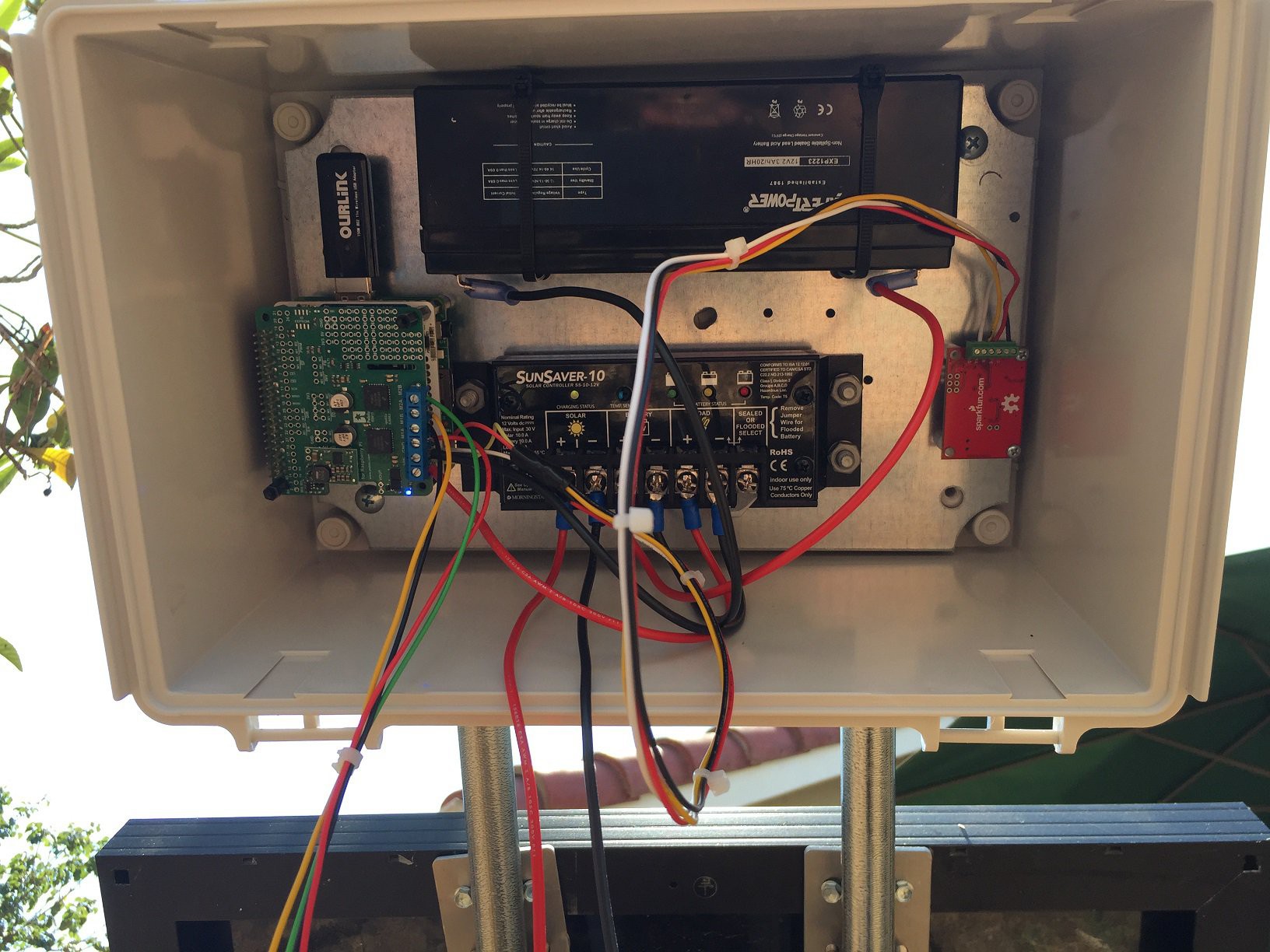
08/16/2015 at 22:34 • 0 commentsI've installed revision B which uses several different components:
- Pololu high current motor controller has replaced the Open Electrons version
- Replaced the Raspberry Pi 2 with an A+
- Removal of the Analog sensors, including current (this may be added back later)
- Change in chassis
- Replaced the 9Ah battery with a 2Ah battery (this only needs to last the Pi overnight)
Here's a shot of the inside of the chassis. The compass is likely going to have to get moved, I think there is too much EM interference in this enclosure.
![]()
-
Upcoming Build
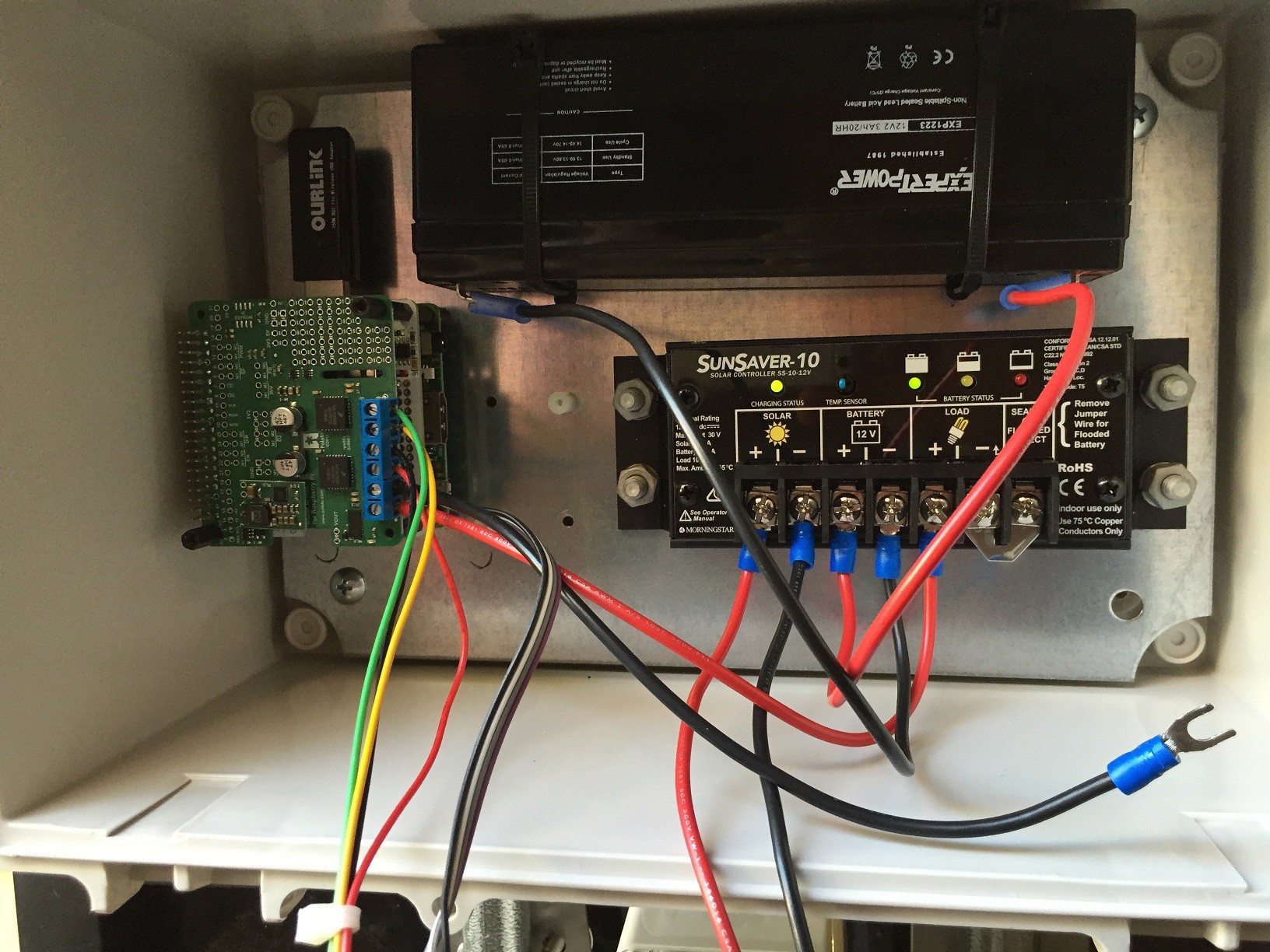
08/13/2015 at 01:18 • 0 commentsHere's a photo of the upcoming build, which uses a Raspberry Pi A+ for a lower power footprint. This means that the battery can be smaller, reducing size and weight of the overall device.
![]()
-
Pan and Tilt Proof of Concept Test
08/13/2015 at 00:56 • 0 commentsHere's a video of a proof of concept test for the pan and tilt system:
Portable 2-Axis Solar Tracker
A cheap, portable solar tracker to allow off-grid power usage globally.