Tim Wilkinson
Tim Wilkinson-
References
12/11/2015 at 19:56 • 0 commentsHere are a few references I've been using while working on this project:
-
The Brain: Raspberry PI
12/11/2015 at 19:41 • 0 commentsThe two obvious brain choices (to me at least) were Arduino or Raspberry Pi. Ultimately the choice was dictated by the needs of the vision system.
One of my design goals for this craft is stereo vision. That means either one camera with a bunch of interesting optics, or two cameras. As I'm primarily a software and hardware guy, two cameras seemed the obvious way to go. For some reason I figured I could easily buy two high-ish end web cameras and plug them into "The Brain" and then pipe those images back along an ethernet cable to the shore. Given this, I'd need something with a few USB ports and ethernet, and so the Raspberry Pi was my choice.
But it turns out that web cameras are really dumb - or at least all the ones I investigated are dumb. I had the illusion that these high end cameras must be doing more than just shipping raw data across USB to the host. Surely they do mpeg4 compression in realtime too? It's not that expensive is it? Well, maybe it isn't but it looks like the don't. And that leaves the poor PI to do all the data compression which, with two cameras, doesn't give you much of a frame rate or much resolution.
Fortunately I found this video. It demonstrates the use of the Raspberry PI Compute Module (something I'd not heard about) which is capable of using two PI camera and the Broadcom hardware to do fast video encoding. So, the Compute Module became the brain. More on the actual vision system later.
![]()
-
Frame
12/11/2015 at 19:14 • 0 commentsI suppose the basis for any project which has to move is its frame. Originally I had planned to use PVC tubing to build the frame. This appears to be quite common when building an ROV; it's easily available, comes with lots of different joints to plug pieces together, and is waterproof. However, when I was at the local hardware store looking at options, I was surprised with just how heavy PVC piping is (somehow I'd never really noticed this). Also, piping doesn't help much when it comes to attaching things to it; it's very round after all.
Then I came across Actobotics. Actobotics reminds me of Mechano when I was a kid (I admit I was always more of a Lego fan). This stuff has a couple of properties I found appealing. First, it's aluminum which makes it light and rustproof. Second, it's design for attaching stuff to. Ultimately I chose the mini-channel stuff as the basis for the frame.
Another early choice I made was for my craft to be a cube. Now, if you look at the literature about the shape of submersibles, cubes are not exactly top of the list. Still, my focus was on making a craft that was highly maneuverable, and a cube would allow me to mount thrusters to make that happen. My theory (untested so far) is that I can give the craft stability though the use of many small thrusters mounted on the frame. I'll find out if that's true soon enough.
I've used 12" pieces of mini-channel for each side of the cube. Unfortunately Actobotics does not make it very easy to build a cube. Specifically there are no good corner pieces to let me connect three mini-channels, each at 90 degrees to the rest. After a few failed experiments, I've settled on using 90 degree hub mounts. I think there are more options if you use the larger channels.
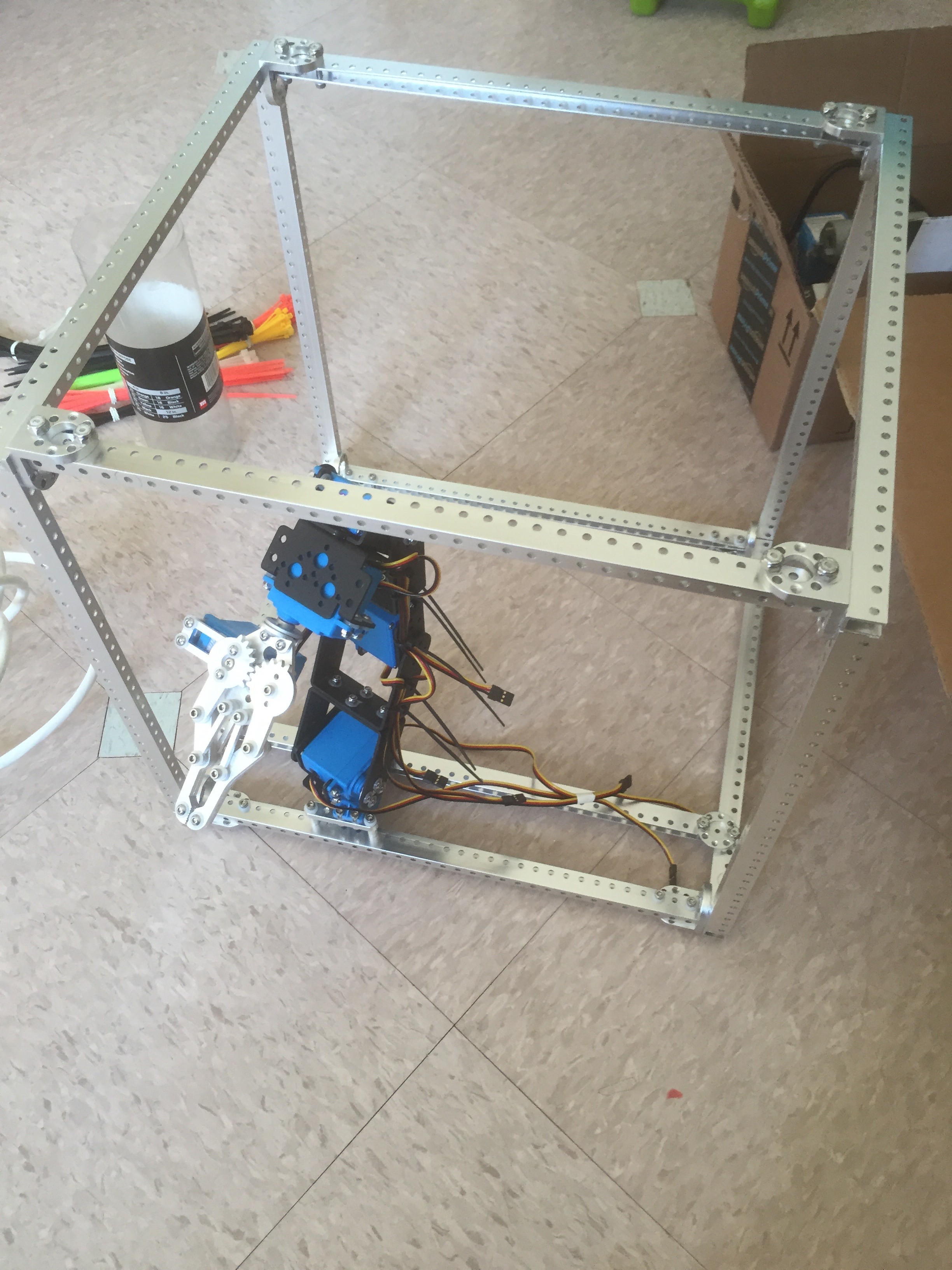
Here's the final frame (with the attached robot arm which I'll take about another day):
![]()