Nigel
Nigel-
Module Magic (Via the Second Serial Port)
06/04/2018 at 05:44 • 0 commentsSeeing how this round is the Robotics Module round I suppose I need to explain how you could use MagiLog as an integrated data collection module for a robot. In addition to the serial port used to communicate with ECUs there is an auxiliary serial port for bidirectional communication between accessories or another microcontroller.
One kind of accessory I’m wanting to specifically develop is a digital dash display. Something like what you could get from Motec, except at about 1/10th the cost.
![]()
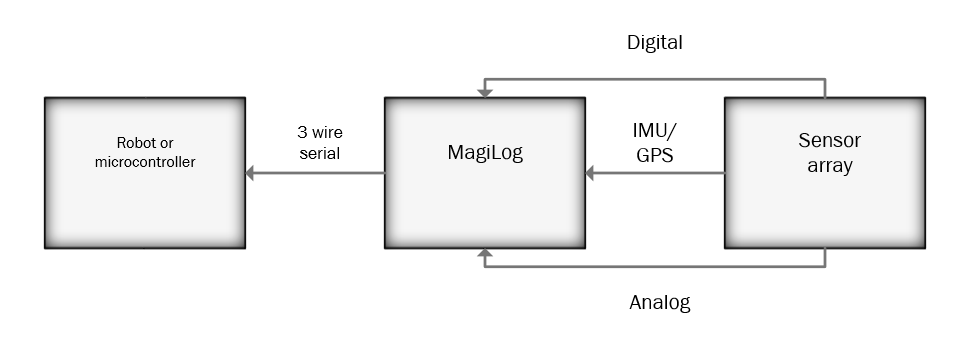
As a module I’d like to be able to set a mode where MagiLog either streams through selected data values or have it work as a request/response type system. Either way it’d allow you to connect a wide range of digital inputs, analog inputs, and IMU/GPS data to your robot using only 3 wires. Ground, MOSI, and MISO. Since this would also be working through DMA I’d imagine with some optimization work we should be able to maintain a very fast refresh rate.
![]()
-
Digital Module HDL
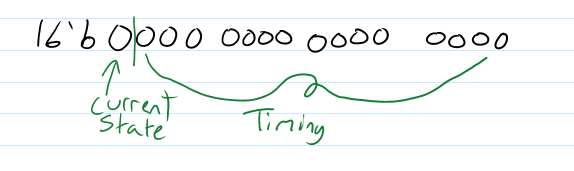
05/27/2018 at 23:28 • 0 commentsLast weekend I was able to finish the HDL for digital inputs. The system comprises of 2 modules I’ve written and one pre-built IP. As with the other modules, each word of data will be 16 bits. I’ve chosen the following encoding scheme:
![]()
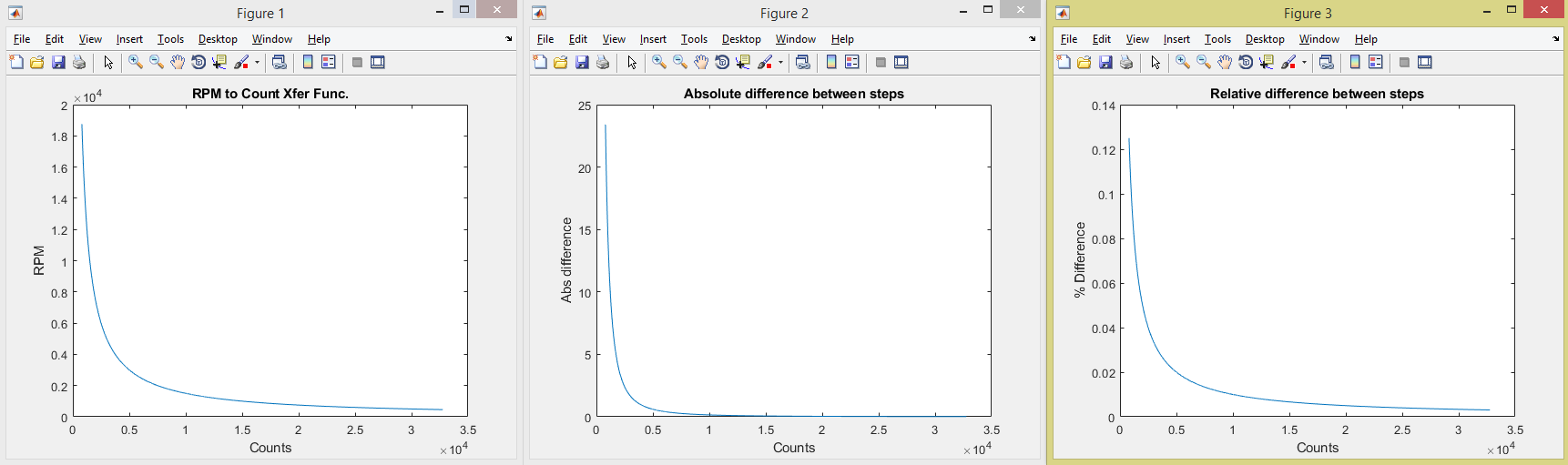
As you can see the MSB is the status bit, it is high when the input is high. The other 15 bits then are left to act as our counter. We won’t be directly calculating frequency/RPM, but the time between pulse events. As this means we need a division step we end up with nonlinearities in the resulting data. As we get closer to a single clock cycle, the read frequency gets very large and the gap between steps also grows. Because of this we need to carefully consider what clock rate we want to use as the timing input. After some playing around I ended up deciding on 250kHz. This gives me a max RPM of 18750 and a minimum of 457.8. The following graphs are cut off at 800 counts for readability. Also, the corresponding frequencies below 800 counts are higher than we probably would ever need.
![]()
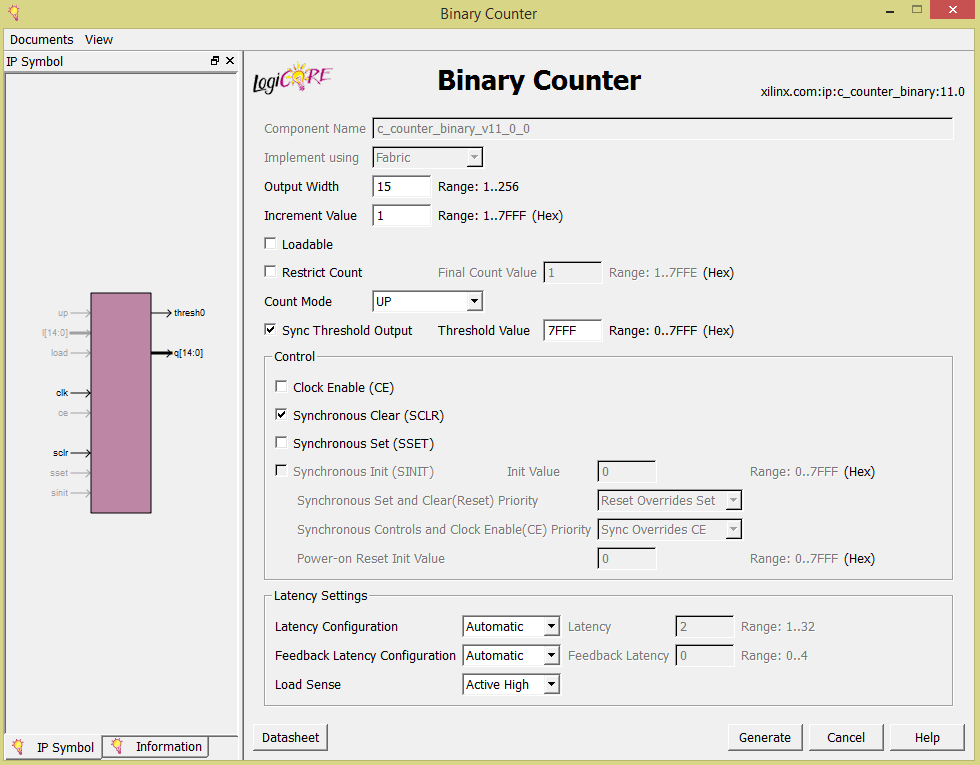
Now onto the actual HDL I’ve used/written. The counter IP is configured as follows.
![]()
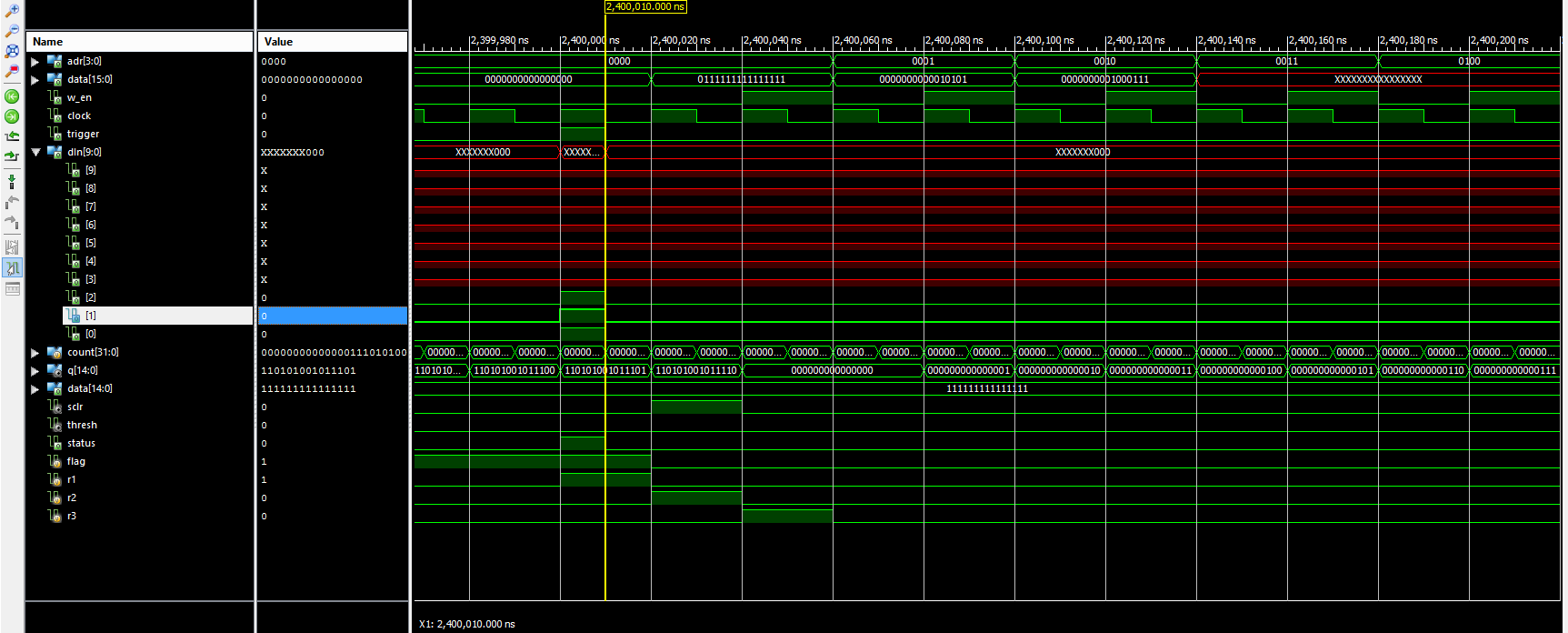
The digimodule module is the data collector for each channel, it times the gap between pulses and directly connect the pulse state to the state bit. Outside of the timer it’s pretty simple, there’s a one-shot pulse generator to clear the counter and another flag to denote when we’ve hit overflow.
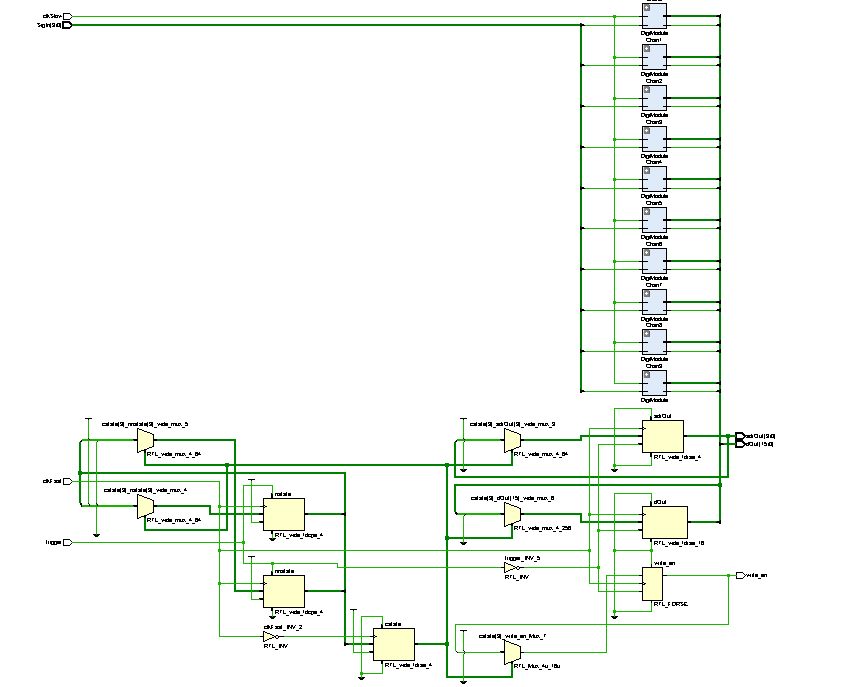
`timescale 1ns / 1ps ////////////////////////////////////////////////////////////////////////////////// // Company: MagiLog // Engineer: Nigel Myers // // Create Date: 05/17/2018 03:25:31 PM // Design Name: Digital Input' // Module Name: DigiModule // Project Name: MagiLog // Target Devices: // Tool Versions: // Description: // // Dependencies: // // Revision: // Revision 0.01 - File Created // Additional Comments: // ////////////////////////////////////////////////////////////////////////////////// module DigiModule( input wire signal, //Module I/O definitions input wire clock, output wire status, output reg [14:0] data ); wire [14:0] q; //Counter output wire wire thresh; //Threshold notifier wire sclr; //Counter clear reg r1, r2, r3; //Single pulse registers reg flag; //overflow flag c_counter_binary_v11_0_0 DigiCount ( //Counter module .clk(clock), // input clk .sclr(sclr), // input sclr .thresh0(thresh), // output thresh0 .q(q) // output [14 : 0] q ); assign status = signal; //Continously assign status state to signal level assign sclr = r2 && !r3; //Get one pulse out of sclr always @(posedge thresh or posedge sclr) begin //Overflow and clear routines if (thresh) flag = 1'b1; else if (sclr) flag = 1'b0; else flag = flag; end always @(posedge signal) begin //At every signal posedge, we check time since last pulse if (flag) begin data = 15'b111111111111111; //If data overflowed we use max value as notifier end else begin data = q; end end always @(posedge clock) begin //Pulse generator for sclr r1 <= signal; r2 <= r1; r3 <= r2; end endmoduleThe top-level module consists of a state machine with states for each channel, as well as an idle and send state. During the send state, we set the correct module output and associated address and pulse a write request to SRAM.
module DigitalMaster( input wire [9:0] SigIn, //Signals into module input wire trigger, clkSlow, clkFast, //Record trigger, main clock, and timer clock output reg [15:0] dOut, //Data output output reg [3:0] adrOut, //Output address output reg write_en //Ram Write Enable ); wire [15:0] dataMux[9:0]; //Mux for counter module outputs reg [3:0] cstate; //State trackers reg [3:0] nstate; reg [3:0] nnstate; localparam [3:0] //Channel addresses Ch0 = 4'b0000, Ch1 = 4'b0001, Ch2 = 4'b0010, Ch3 = 4'b0011, Ch4 = 4'b0100, Ch5 = 4'b0101, Ch6 = 4'b0110, Ch7 = 4'b0111, Ch8 = 4'b1000, Ch9 = 4'b1001, Send = 4'b1010, Idle = 4'b1011; DigiModule Chan0 ( //Instantiate 10 modules .signal(SigIn[0]), .clock(clkSlow), .status(dataMux[0][15]), .data(dataMux[0][14:0]) ); DigiModule Chan1 ( .signal(SigIn[1]), .clock(clkSlow), .status(dataMux[1][15]), .data(dataMux[1][14:0]) );![]()
![]()
My next two deliverables are the CAN/OBD simulator PCB and the GPS parsing HDL. Each of these are more difficult than the last so I’m not sure if I’ll be able to keep on schedule. But I’ll try.
-
Digital sim PCB done!
05/25/2018 at 00:59 • 0 comments![]()
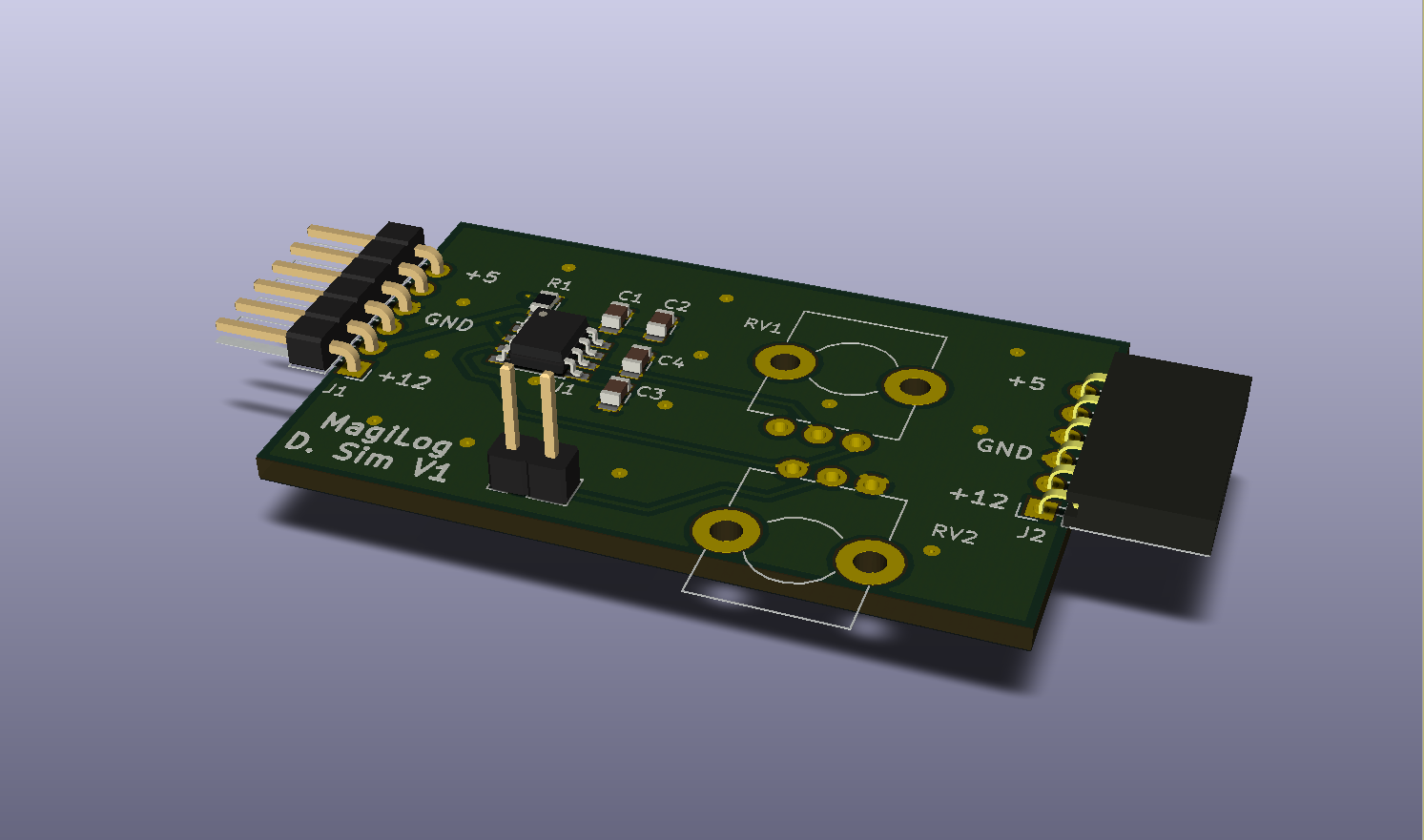
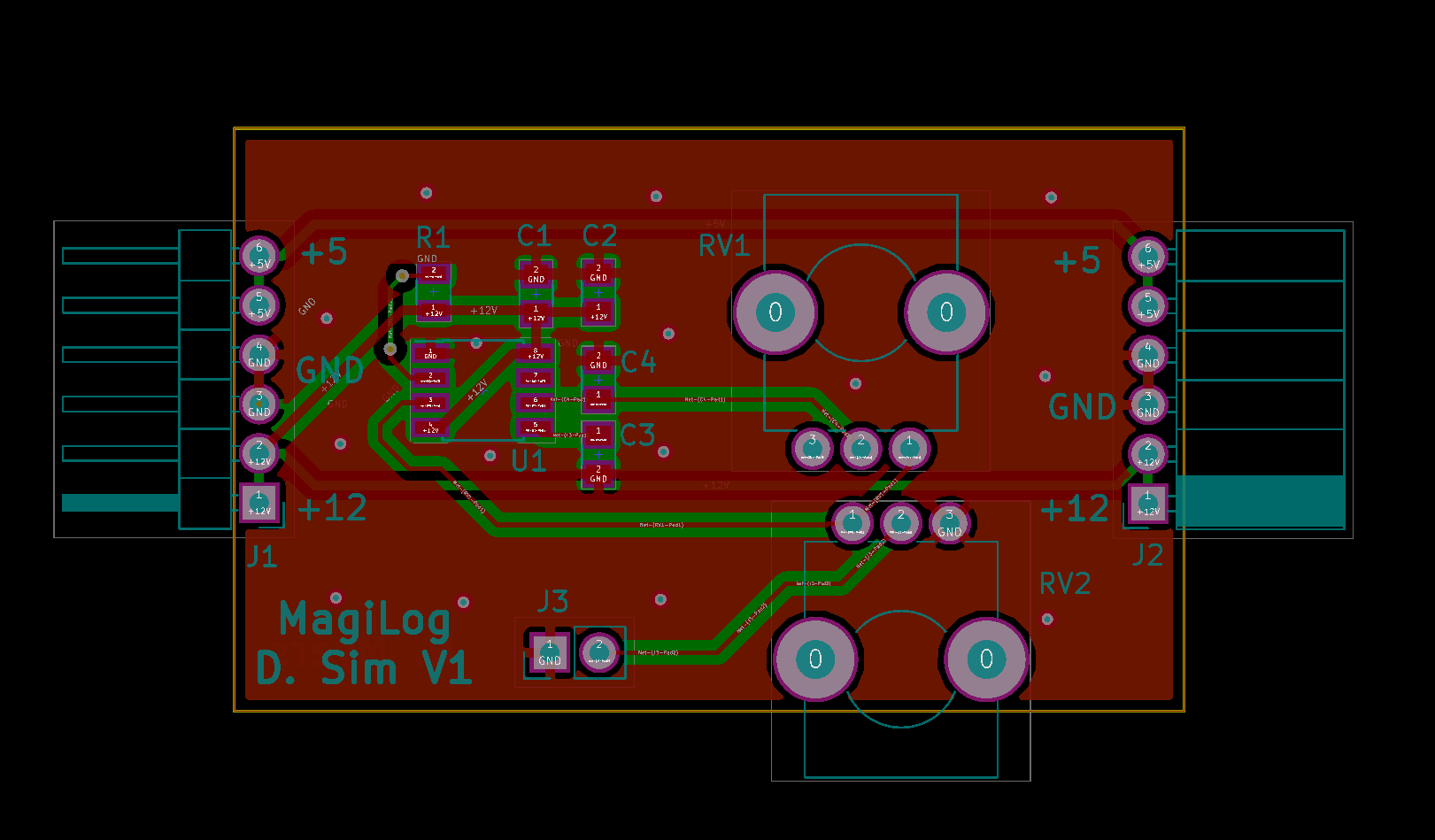
The PCB for the digital input simulator has been done for a bit now. Had some other things that I needed to take care of, so this log got pushed back a few times. I ended up finishing only a day or two after starting, in part to it being a much simpler board than the analog sim. I’ve uploaded the newest round of files to the project page. I should move everything to Github at some point. Perhaps towards the end of the month I’ll have some time to set that up.
![]()
The circuit is based around a single 555 with 2 control pots. One of the pots handles the output frequency, and the other pot handles the amplitude of the pulses. (See older log for more details) This lets us easily adjust the voltage and frequency of the inputs to the FPGA. Using an oscilloscope, I can verify what the FPGA is recording to make sure things are good with the HDL and hardware. The code for the digital module is done, I just need to finish commenting the code as well as the associated project log. There ended up being more details worth discussing than I originally thought so it’s taking a bit of time. Hopefully I’ll have it out in the next few days.
-
Weekend Update
05/20/2018 at 04:11 • 0 commentsI was able to finish the analog module HDL as well as the digital simulator PCB. I’ll expand more on the latter tomorrow, but I’ll go over the ins and outs of the code used in the analog module in this update. The point of this module is to interface my chosen ADC on one end, and produce data and ram write requests on the other. This module in the end will be a few levels down from the top as we need to combine the data from disparate modules into a single address space that we can access from the XMega.
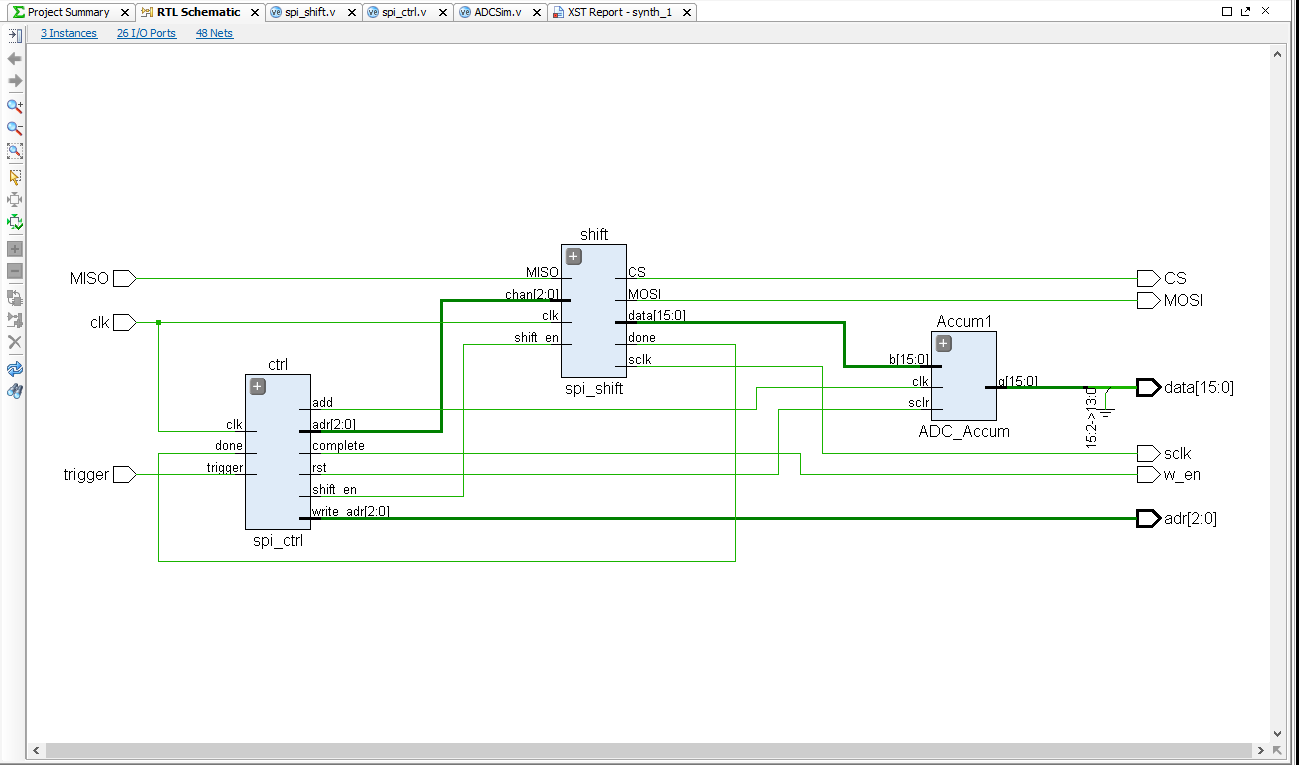
The analog module is comprised of 4 main parts, which I will cover individually: The top-level module, the process controller, the data shift register, and the accumulator. With these 4 components I can interface with my ADC which produces 12bit measurements and combine multiple measurements into a new 14bit measurement for each channel. These measurements are then ready to be saved in some variety of RAM to be accessed by the XMega.
![]()
The top-level module is quite simple, it contains the modules needed for each ADC and maps the appropriate I/O for the data to be recorded. One thing to note is we get around the need for a separate bit shifting step by forcing the two MSB to 0 and then discarding the two LSB to get the 14 bits of data we care about.
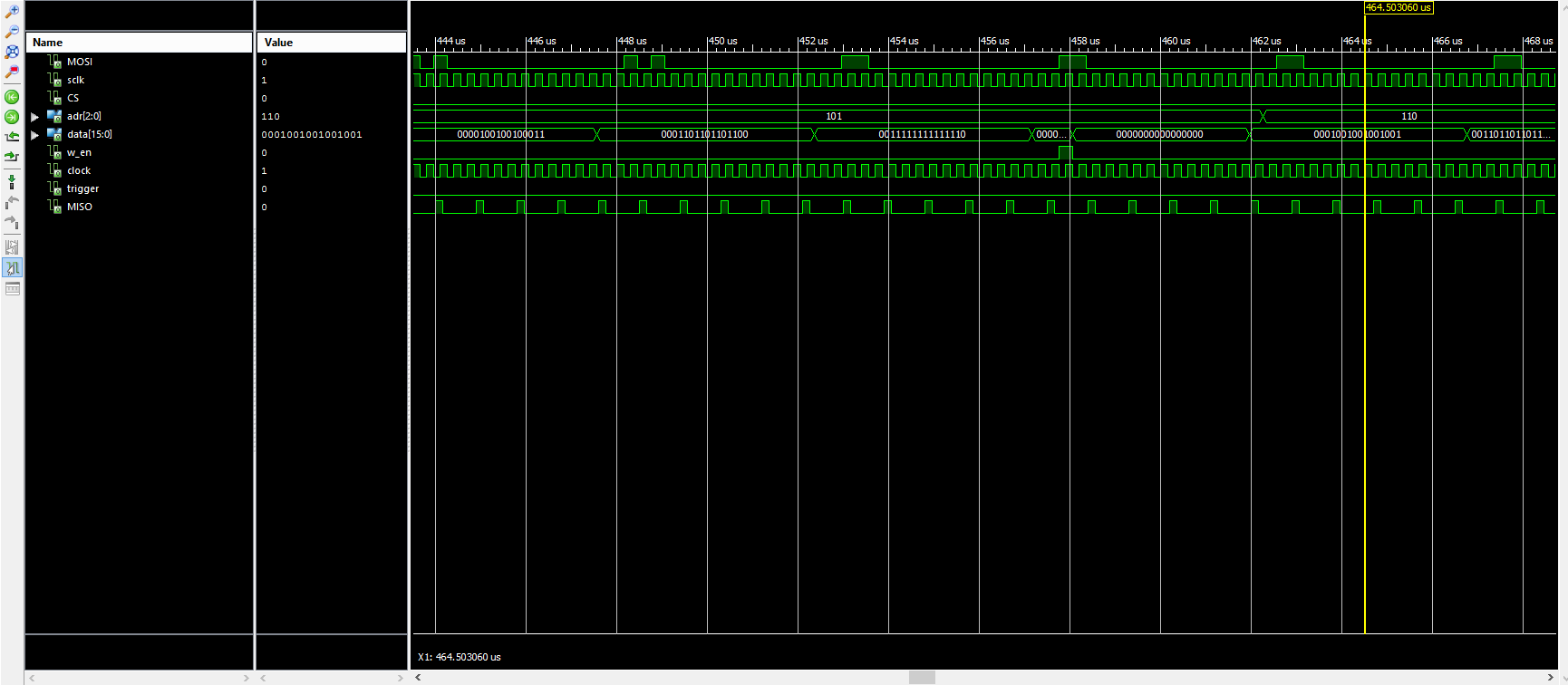
module ADC_Master( input wire clk, // ADC clock in, 8MHz nominal input wire trigger, //Update cycle trigger signal input wire MISO, // Master In, Slave Out output wire MOSI, // Master Out, Slave In output wire sclk, //Clock output to ADC output wire CS, //ADC Chip select line output wire [2:0] adr, //Address to write data to output wire [15:0] data, // Data to be written output wire w_en // Write enable for data ); wire shift_en, done; // Shift register status comms wire add, rst; //Accumulator control lines wire complete; wire [15:0] acc_in; wire [15:0] acc_out; wire [2:0] chan; assign data = {2'b00, acc_out[15:2]}; //Bitshift 16 bit sum to get 14 bit data assign w_en = complete; spi_shift shift ( //SPI Shift register module .sclk(sclk), .MOSI(MOSI), .MISO(MISO), .CS(CS), .clk(clk), .done(done), .shift_en(shift_en), .chan(chan), .data(acc_in) ); spi_ctrl ctrl ( //SPI controller .shift_en(shift_en), .adr(chan), .done(done), .add(add), .rst(rst), .complete(complete), .write_adr(adr), .clk(clk), .trigger(trigger) ); ADC_Accum Accum1 ( //Accumulator for oversampling .b(acc_in), // input [15 : 0] b .clk(add), // input clk .sclr(rst), // input sclr .q(acc_out) // output [15 : 0] q ); endmodule
The module that does the actual interfacing with the ADC is spi_shift. Overall, it’s pretty simple. It shifts in the data written by the ADC on the positive clock edges and creates the address to shift out on the right bits on the negative clock. This allows me to cycle through all 8 channels of each ADC depending on what is requested by the controller.module spi_shift( input wire [2:0] chan, //Channel to shift out input wire shift_en, clk, input wire MISO, output reg [15:0] data, output wire sclk, output reg MOSI, output wire CS, output reg done //Done notification line ); reg [3:0] count; assign sclk = shift_en & clk; //Only output clock when we need to assign CS = ~shift_en; //Invert shift enable to create chip select for ADC always @(negedge clk) begin if (count == 4'b0010) //Output for next ADC Chan on neg MOSI <= chan[2]; else if (count == 4'b0011) MOSI <= chan[1]; else if (count == 4'b0100) MOSI <= chan[0]; else MOSI <= 0; if (count == 4'b1111) //If last bit received, signal done done <= 1'b1; else done <= 1'b0; end always @(posedge clk) begin if (shift_en == 1'b1) begin // Shift in data on pos if enabled count <= count + 1'b1; data <= {data[14:0], MISO}; end else begin //Otherwise wait count <= 4'b0; data <= data; end end endmodule
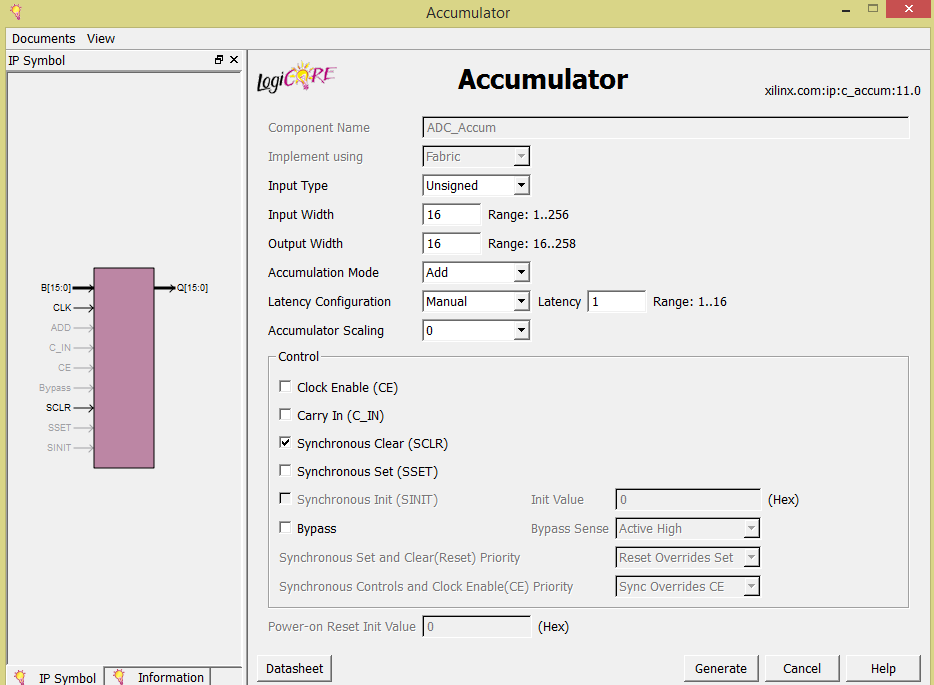
The accumulator is a prebuilt IP that comes free with ISE webpack. Using the graphical IP configurator I set the correct parameters for my use.![]()
The bulk of the action happens in the spi_ctrl module. This is the module that controls the data flow, telling the other modules what to do at the right time. This module is responsible for toggling the data transfer, accumulator reset and the writing of a final value at the correct address. I did this through a state machine with 5 states, with an additional state available if needed. Here’s a code snippet of the “Run” state which is where most of the data movement happens to give you an idea of the code structure.
Run : begin //Main running state shift_en <= 1'b1; //Turn on shift register complete <= 1'b0; flag2 <= flag2; if (count == 4'b1111) begin if (flag2 == 1'b1) begin //Use flags to run send only once nstate <= Send; flag2 <= 1'b0; end else begin nstate <= nstate; flag2 <= flag2; end write_adr <= write_adr; adr <= adr; end else if (count == 4'b0000) begin write_adr <= curradd; adr <= adr; nstate <= nstate; flag <= 1'b0; flag2 <= 1'b1; end else if (count == 4'b1000) begin if (flag == 0) begin //Use flags to increment only once nadd <= curradd + 1'b1; flag <= 1'b1; end else begin nadd <= nadd; flag <= flag; end adr <= adr; write_adr <= write_adr; end else if (count == 4'b1110) begin //Update address for shifter adr <= curradd; write_adr <= write_adr; nstate <= nstate; end else begin write_adr <= write_adr; adr <= adr; nstate <= nstate; flag <= flag; end end
All that’s left to be back on track is the digital module HDL. I’ve done most of the planning and it’s much simpler than the analog code. So (fingers crossed) it won’t take me too long to write. Until tomorrow, peace! -
Analog Update
05/15/2018 at 05:48 • 0 commentsTLDR: I’ve hit my first self imposed deadline and I’m running a bit behind schedule. There were some PCB design issues that I noticed and then fixed. Also, the bulk of the analog HDL is done, but not ready for synthesis. Once those issues are resolved I’ll do a more detailed post on how I’ve structured the 3 subsections of the analog module. In the meantime, I have uploaded a snapshot of where I’m at with the PCB and Verilog.
![]()
Over the last week I noticed a few issues with my board layout. Some of the silkscreens were poorly placed, a bunch of vias were just floating in the abyss and I had mis-sized a capacitor. The silkscreen issues were easy to fix, just move and/or resize some text. The other two issues were a bit more involved. First fix was growing the board to accommodate the larger but properly sized capacitor footprint. As it turns out when I updated my track/via parameters to what OSHPark recommends it changed how any new vias would be formed. Instead of properly stitching where I wanted to stitch the ground plane it would create a via that was completely isolated from any other copper. After some googling I was able to get around this by creating a custom through-hole part that would become the base part for any vias I wanted to stitch with.
![]()
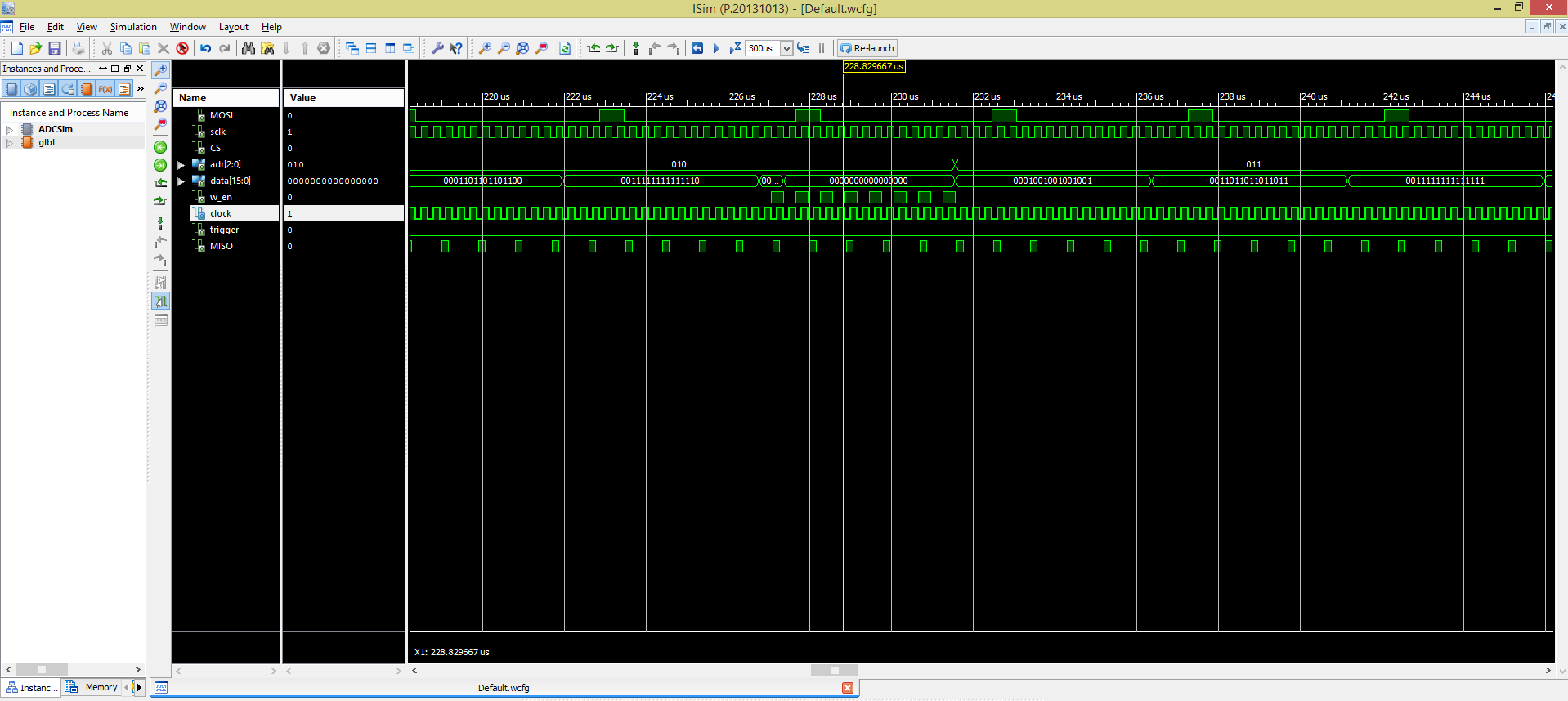
On the Verilog side of things, I had a design that ran well in simulation but when I tried to synthesize it I ran into unwanted optimizations or errors. Essentially the issue I’m running into is that not all code that works in simulation can be synthesized even if you don’t use any non-synthesizable parts of the Verilog language. I have never been very good at Verilog, so coming back to it after many years debugging is kinda difficult. The error messages you get with HDL designs are not as useful as their software equivalents, so it feels like I’m running blind to a degree.
![]()
Overall my FSM design is far from good and it’s causing new issues as I try to fix old ones. I was able to get rid of one issue where a reg was optimized away but in doing so I now get unwanted (but not function breaking) behavior in the reset portion of the code. I end up resetting the accumulator that adds up the ADC readings a bunch of times instead of just once. It doesn’t impact the function of things but it’s something that needs to be fixed.
![]()
The bigger issue is that this new snapshot of code won’t complete synthesis without throwing an error. After one more round of attempted fixes I’ll probably take a step back and focus on the digital sim PCB and HDL module that I wanted to get done this week. Hopefully after coming back to it with fresh eyes I’ll be able to get things working on chip.
-
First PCB Done(ish)
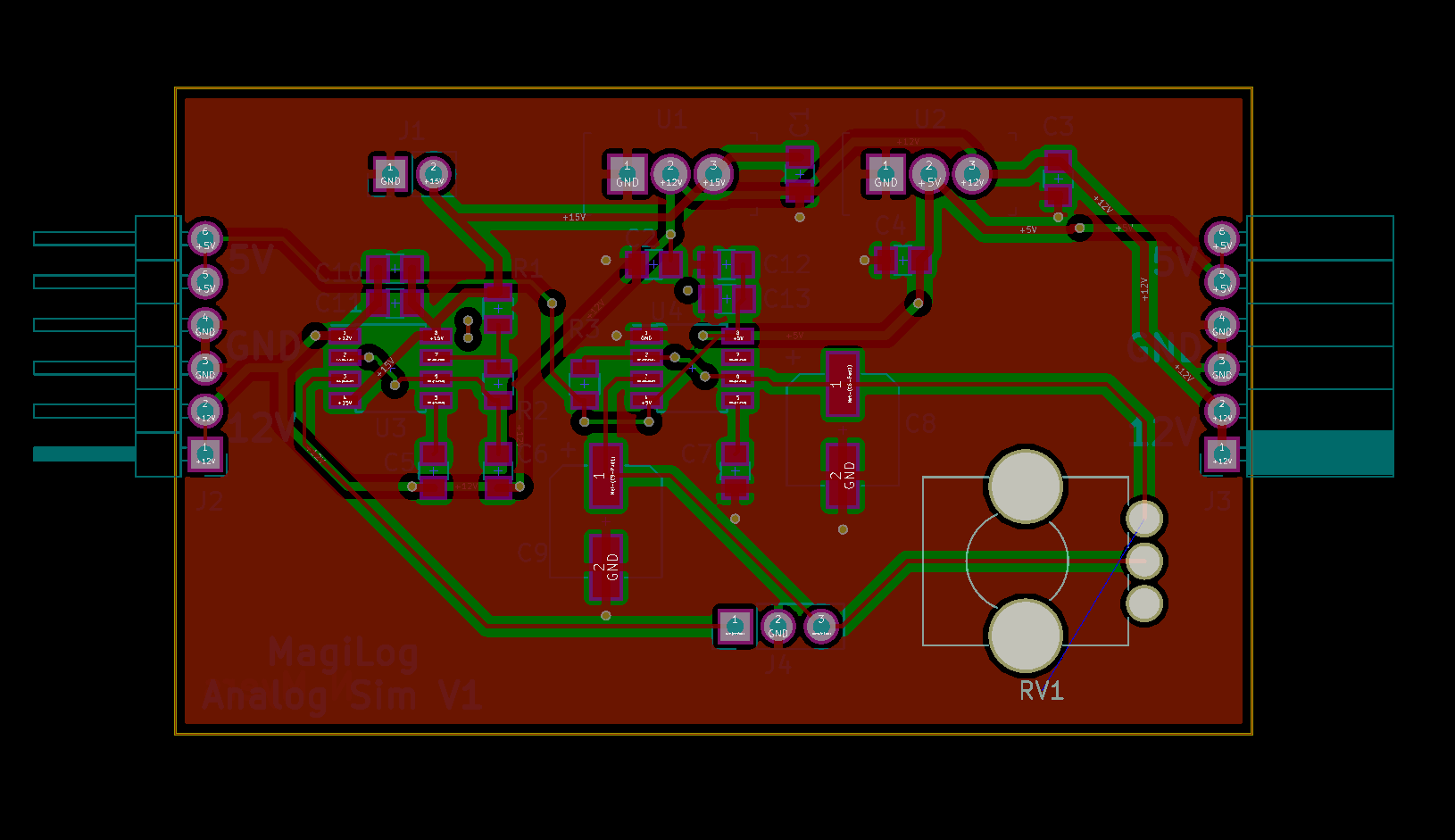
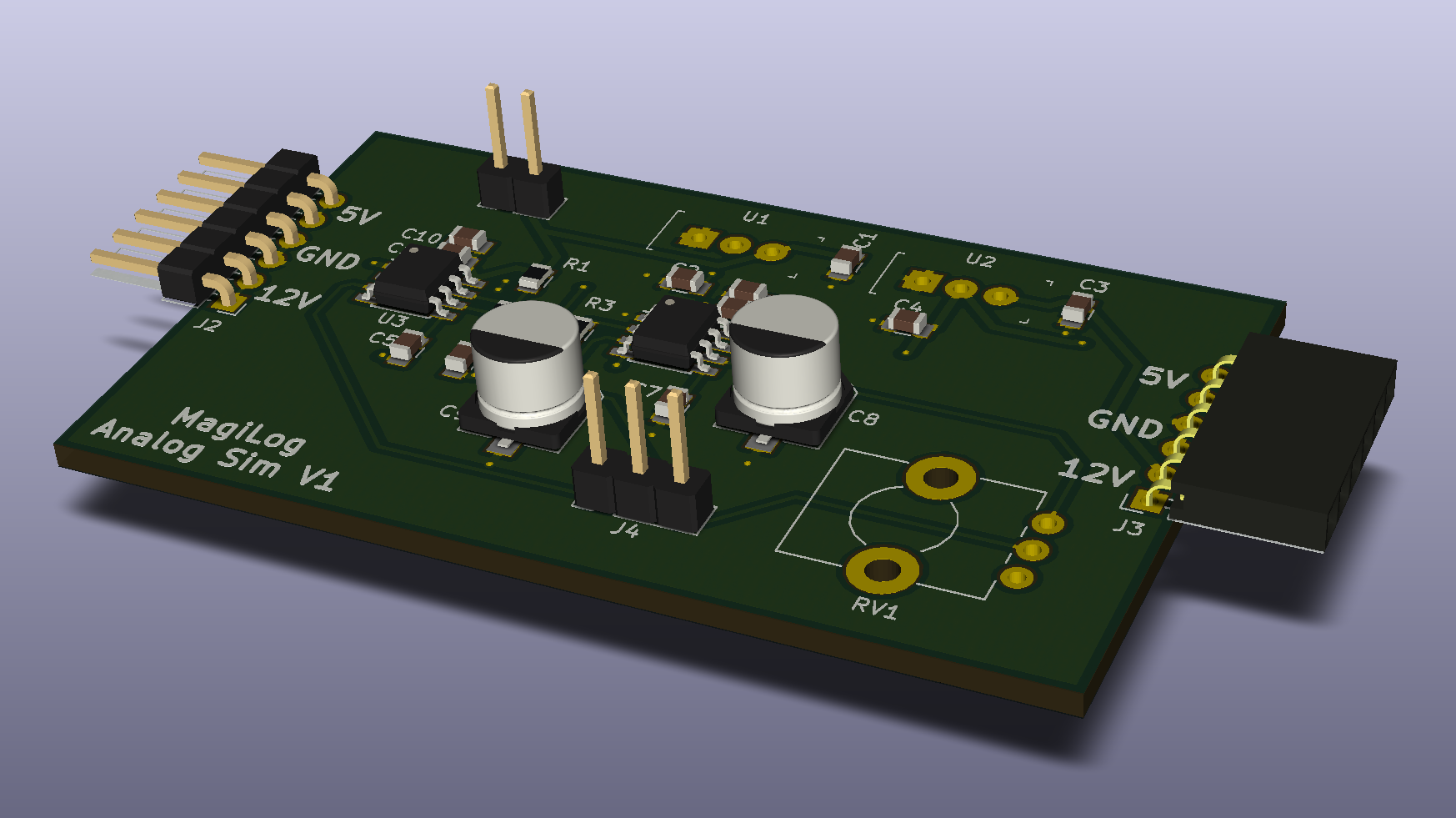
05/06/2018 at 02:09 • 0 commentsIt’s been about a week since my last update and so far, I’d say I might be a little ahead of schedule. Pretty much done with refreshing my memory on Verilog and should be starting the analog module code tomorrow. I managed to finish the analog sim PCB a week early which is nice.
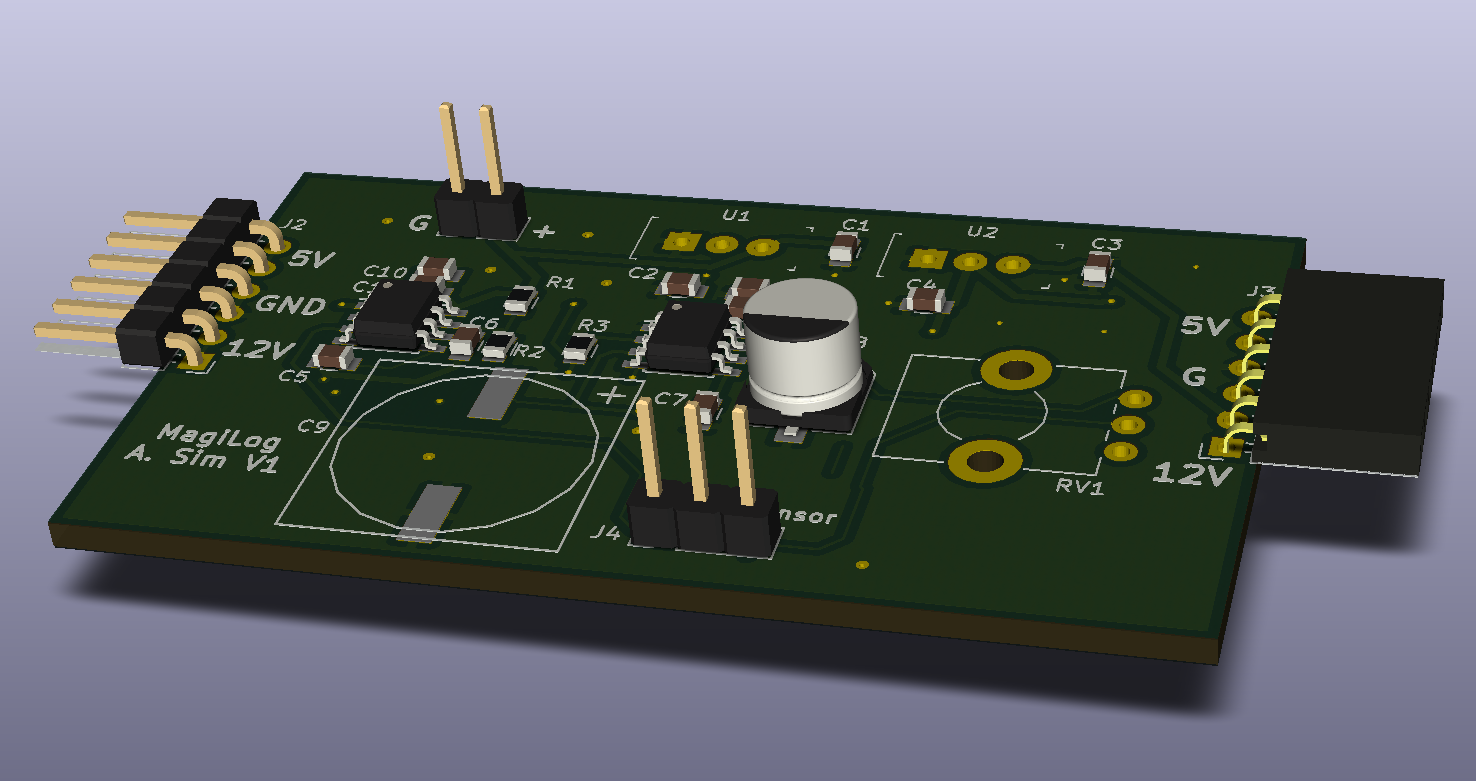
![]()
It’s a simple 1-sided 2-layer board with mostly SMD components. The pot, regulators, and headers are through hole due to availability/ease. I chose 0805 for the passives to make things easy to solder as space isn’t really a premium with this board.
From the original prototype there are a few changes. I’m now following LT’s recommended practices for decoupling the 555s. Also, the 555 that swings between the 15V and 12V rails has been switched to a LMC555 as it can handle 2-3V operation.
![]()
Last thing to do will be to do the Design Rules Check when I decide which PCB house to go with. Currently trying to decide between Seeed, OSHPark, and JLC. It's a small board so I'm leaning towards OSHPark due to the quality and low issue rate. Also, purple. -
Scheduling the Grind
04/30/2018 at 00:04 • 0 commentsFor the last few weeks most of my time that I’ve spent on this project has been reading through textbooks for a Verilog refresher. While I’m making good progress through it some days I slack off completely and some days I go a bit too hard and end up burned out. So to ensure sustainable progress I’m going to whip up a dev schedule.
Currently there are three task groups that I can work on in parallel.
- FPGA HDL
- ADC module
- Digital module
- IMU module
- GPS module
- SRAM/Interface module
- Top level module
- XMega code
- TBD
- Car Sim PCBs
- Analog PCB
- Digital PCB
- CAN/OBD PCB
As a lot of the XMega code will depend on what I end up doing with the FPGA I’m going to somewhat ignore it for now and focus primarily on sim PBC design and the FPGA HDL. Here’s the schedule that I’m going to try to follow.
Date
May 6
May 13
May 20
May 27
Deliverable
ADC Module
Analog PCB
Digital Module
IMU Module
Digital PCB
Date
June 3
June 10
June 17
June 24
Deliverable
GPS Module
CAN/OBD PCB
XMega Code Skeleton
FPGA Top Level Module
That’s all for now, I need to get back to the books.
- FPGA HDL
-
HDLOL
04/21/2018 at 21:46 • 0 commentsI’ve spent the last little while working away on the HDL planning for MagiLog. It’s been a long time since I’ve touched Verilog, so it has been a slow process. Here’s an update on where I’m at in the process.
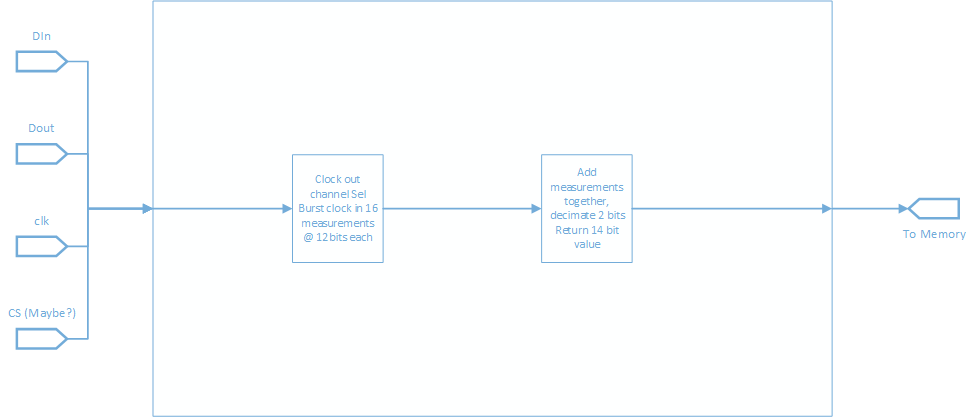
ADC Module: This will be a fairly straight forward state machine with it cycling through the channel select -> read -> store process with the channel selection incrementing on each round. Since we have so much sampling overhead at 100Hz we’ll oversample our ADC to increase our resolution from 12bits to 14bits. To do this we follow the procedure explained in this TI application report. We take a burst of 16 measurements and sum them up. From here we bitshift the value twice (dividing by 4) to receive our final 14bit number. Once we get the value to save we record it to the correct memory location and then move to the next channel.
![]()
Each ADC will have its own module and memory block. This will make scaling up the number of inputs quite easy.
Digital in Module: Since pretty much everything else is using 16bit numbers I figured I would continue the tradition by using them on the digital inputs as well. Instead of encoding multiple lines on a single value what I think I’m going to do is have the MSB be the pin state and then the remaining 15bit will be a counter so that for each pin at any given time I can know the frequency and state without having to rely on reading back older values. Once again, we can encourage modularity by having each pin be on its own module and memory block.
GPS Module: This is going to be the most complex module I think. The data payload is very large as it’s ASCII encoded and there are multiple characters that we want to ignore. I’ll have to create a state machine based on comma and header recognition or something like that to parse that data and put the values in the appropriate memory space. I’ll probably do the conversion into integers on the XMega. I still need to decide if/how I’m going to use the 1PPS output of the GPS module.
IMU Module: This one is going to be like the ADC module. I have to input an address and then read the corresponding byte(s) which then I save to memory. I’ll need to create a table of the addresses I care about and then have the state machine cycle through them.
-
RN42 (Bluetooth)
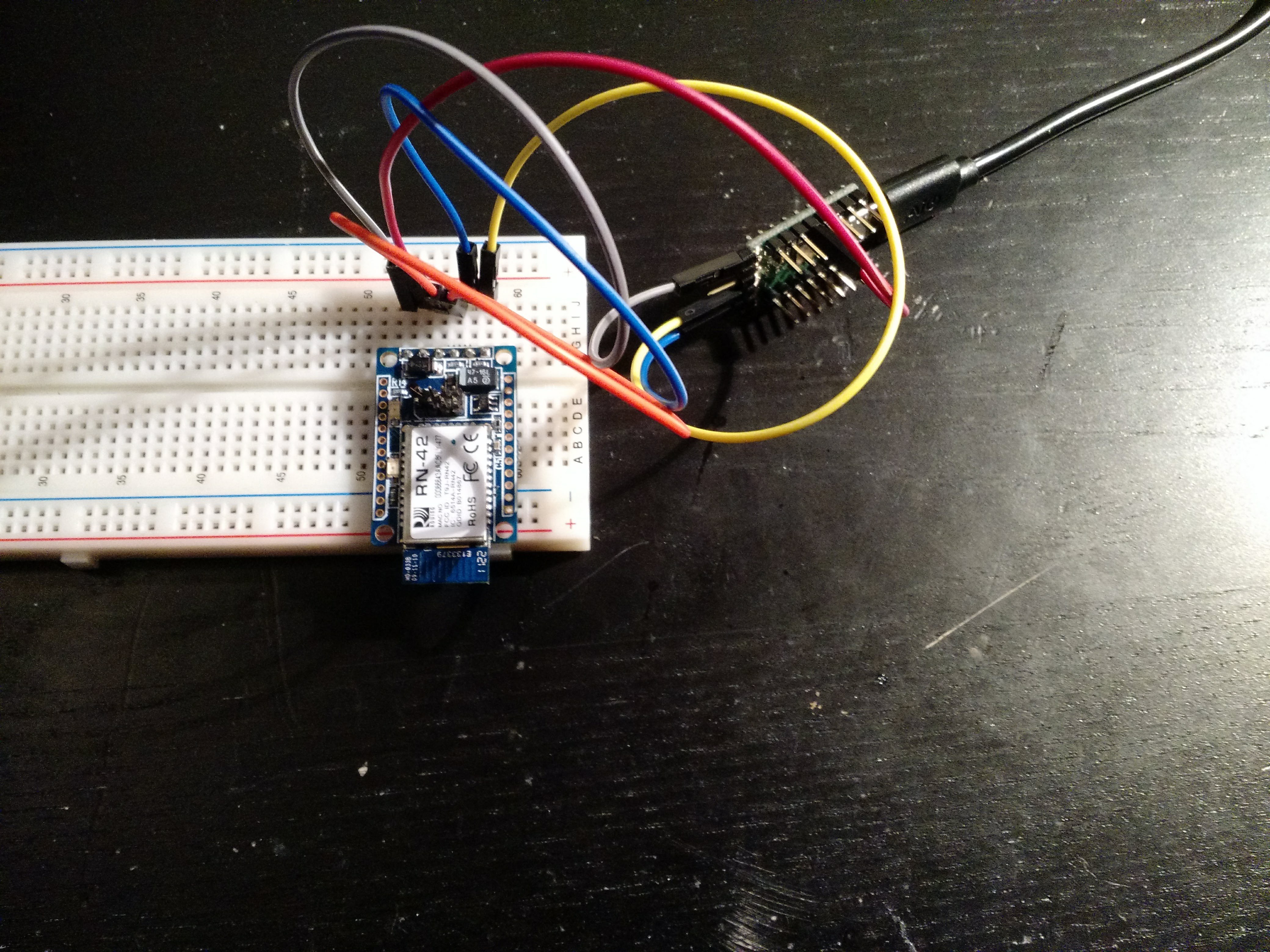
04/11/2018 at 07:18 • 0 comments![]() Getting the RN42 up and running was surprisingly simple. Just hooked up a serial adapter and I was able to pair the device with my computer without trouble. From there we just open up two serial terminals to verify that the communication is working. There was one odd quirk with how the Bluetooth COM port worked. While the datasheet said to use the “outgoing” labelled COM port I was only able to get the device to communicate using the “incoming” port. Once everything was set up I was free to send as much gibberish between serial terminals as I wanted.
Getting the RN42 up and running was surprisingly simple. Just hooked up a serial adapter and I was able to pair the device with my computer without trouble. From there we just open up two serial terminals to verify that the communication is working. There was one odd quirk with how the Bluetooth COM port worked. While the datasheet said to use the “outgoing” labelled COM port I was only able to get the device to communicate using the “incoming” port. Once everything was set up I was free to send as much gibberish between serial terminals as I wanted. ![]()
There are some newer options from Microchip that have support to up to Bluetooth 4.2, but I'm not sure if I'll need that much throughput. I'll try to push the RN42 as far as I can and upgrade if I need to down the road.
I’m almost finished with all the peripherals now. I just have the OBD/CAN system left but I need to wait on a few components to get in before I can get the test bench all set up. I’ll start filling in the details on what I’m going to do with the XMega and the FPGA while I wait. It looks like I’ll be getting down to coding by this time next week.
-
GPS Part 2 - Success!
04/10/2018 at 06:43 • 0 comments![]() I’m still not sure what the issue was but everything seems to
be working now. I’m able to send configuration messages and have them change
parameters. Now that the problem is behind me I can start digging into the
workings of the module.
I’m still not sure what the issue was but everything seems to
be working now. I’m able to send configuration messages and have them change
parameters. Now that the problem is behind me I can start digging into the
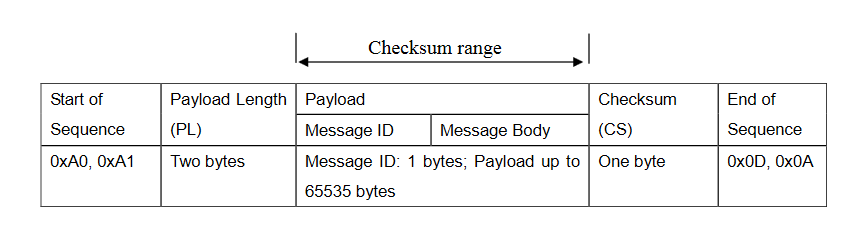
workings of the module.For use in MagiLog there are a few settings that we’ll need to set. We need to set the update rate to 20Hz, align the messages to UTC seconds, and increase the baud rate. App note AN0003 covers the binary format used to communicate with the Venus modules.
![]()
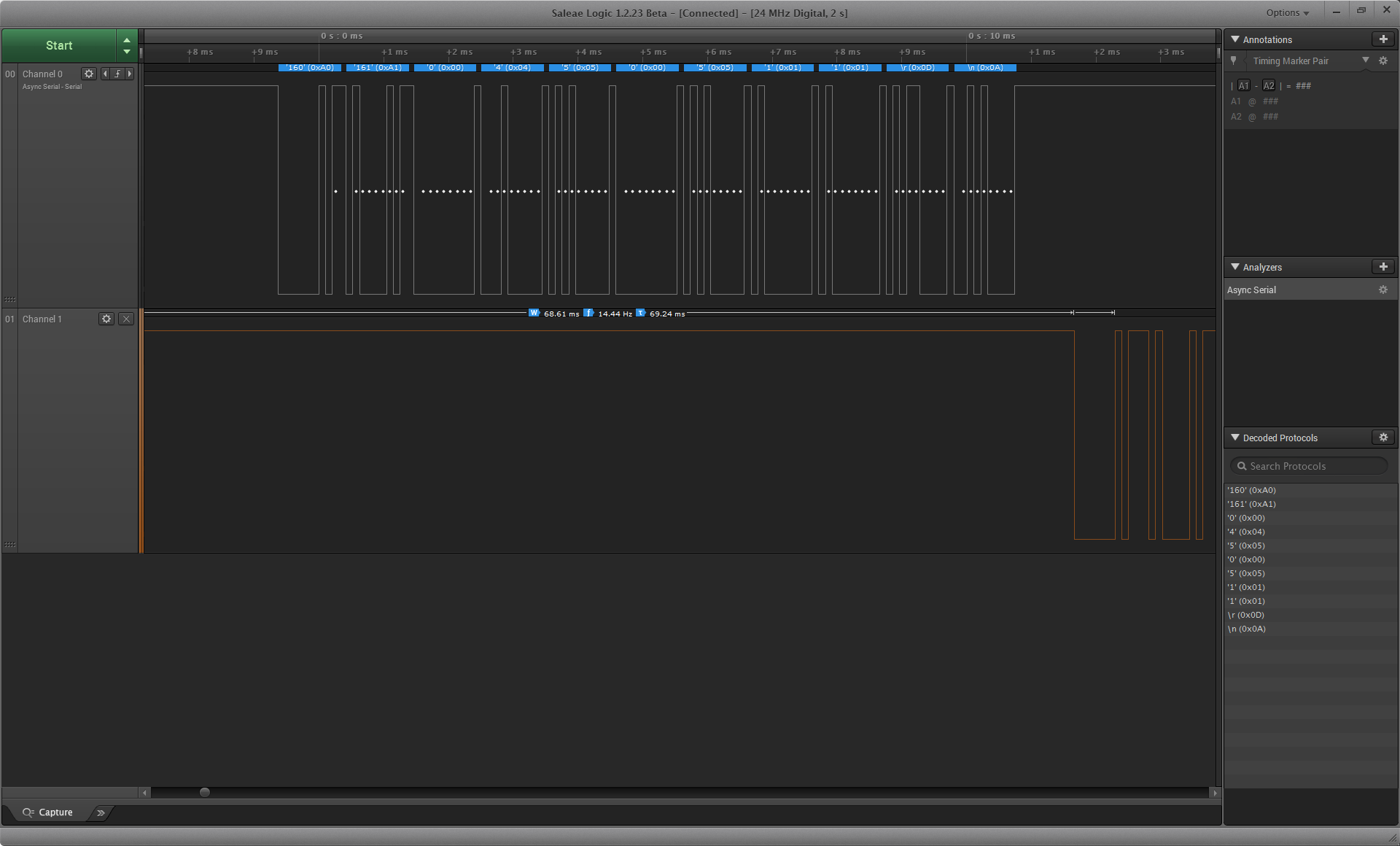
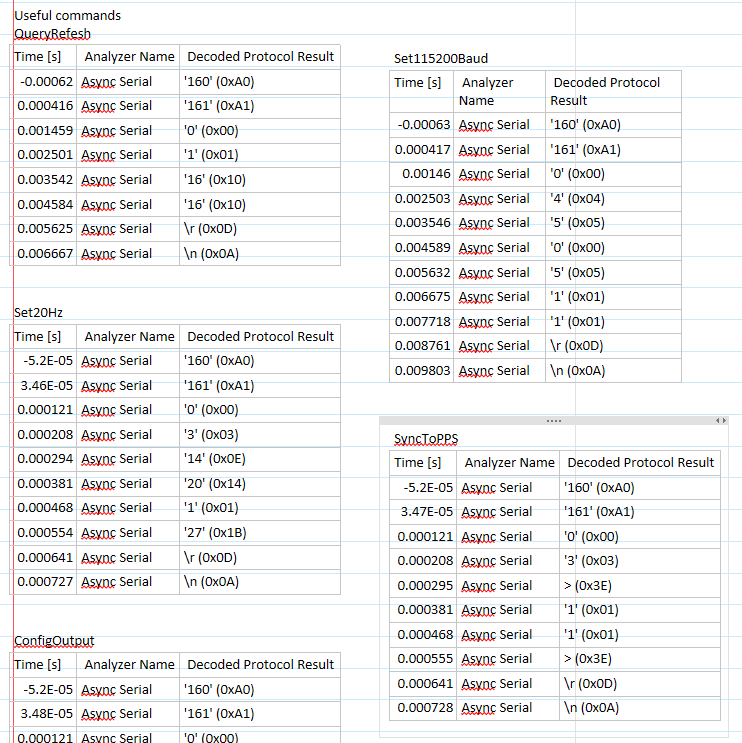
This is the overall structure of the message, it’s fairly straightforward and won’t be too difficult to work with. One thing to note is that each message needs a checksum number generated to be sent with the message. Since there’s only a small number of messages I’ll ever need to send it will be faster for me to just extract the messages with my Logic and export the values from the software.
![]()
![]()
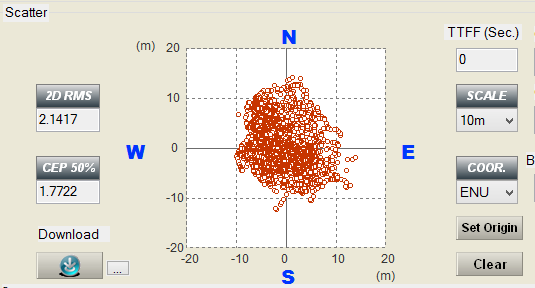
Once I had everything configured how I wanted I set up the antenna and let it sit for a few hours. Here are the results I got.
![]()
As you can see the overall spread is sizeable. That said, the calculated accuracy is actually better than what is advertised, 1.77m vs 2.5m. This was in less than ideal conditions, so I’m impressed. By combining the GPS data with the accelerometer data, I think I can get that error down even more.
The last feature that’s worth covering is the 1 pulse-per-second (1PPS) output. It’s accurate to around 20ns and will be stable throughout a wide temperature range. I’m looking into using it as a reference for the other trigger clocks to keep all the data aligned. From what I can tell it should work and will make a lot of timing issues much simpler.
MagiLog: Open Automotive Datalogging
Developing a full featured datalogger on the cheap

 Getting the
Getting the 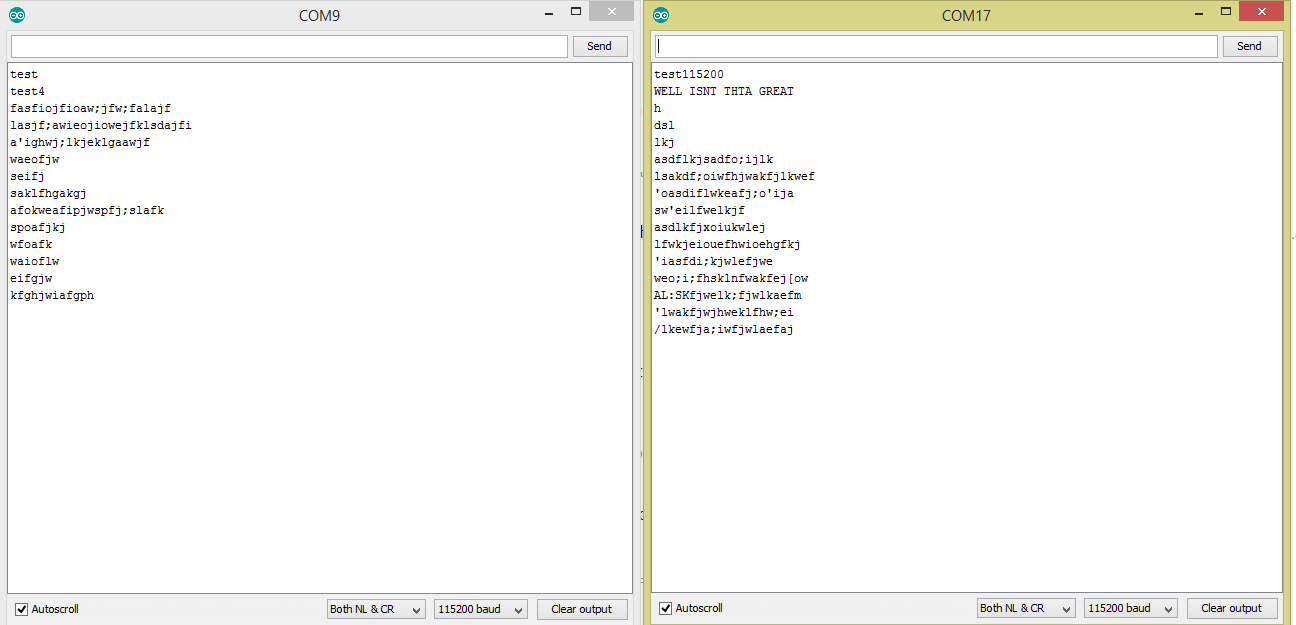
 I’m still not sure what the issue was but everything seems to
be working now. I’m able to send configuration messages and have them change
parameters. Now that the problem is behind me I can start digging into the
workings of the module.
I’m still not sure what the issue was but everything seems to
be working now. I’m able to send configuration messages and have them change
parameters. Now that the problem is behind me I can start digging into the
workings of the module.