Douglas Miller
Douglas Miller-
Well, She moves. Sort of...
12/21/2015 at 00:31 • 0 commentsOkay, so I got her ready for a test run, and set her on the floor. Fired up the transmitter, and gave her the juice. And she spins in a circle and crashes like a dog with three broken legs. First off, never should have set it on the floor. She now sits up on a stand with the legs swinging in the breeze. My bad on that one.
Got her fixed back up, printing and replacing about a dozen parts. Had to take a couple of days away, 'tis the season and all that, and finally got back to her this weekend. This time I spent some extra time getting everything adjusted just right, and even got the firmware started and to the point it was usable. So hooked up the arduino and tested out the whole control system. Seems like every thing is coming together nicely. I'm going to control it with just the right stick, using the left for the 2 axis camera gimbal. Another channel will start and stop video recording. The arduino code does that blending of the 2 channels on the right stick to set the speed of each side.
So where I am right now is wishing I had the camera set up and running a while ago. That way I could at least have a video of her moving across the floor for a whole two feet or so. I just broke another part. It's the cam's that go between the two different sections on each side. The current design is just not up to the strain it undergoes. I've broken three of them so far, and that's enough for me. So back to the drawing board, and I swear I'm not going to fire her up until those damn cam's are up to the task.
Two steps forward and one back. About normal around here anymore.... Lol.
-
BOM missing in action. Lol.
12/17/2015 at 00:38 • 0 commentsGuess I should put in here somewhere that I'm working (slowly, paper work is not my thing) on a BOM and some build instructions. Not sure if anyone else will ever want one of these beasts, but if they do I want it do-able for them. :)
-
Basic Assembly Complete
12/17/2015 at 00:34 • 0 commentsI got it all 3D printed and put together today. I really wanted to get a video of it running tonight, but no such luck. Got slowed down because I didn't leave any wiggle room on the motor mounts, and they needed it. Gear on the motor is shoved up way to tight against the first stage gear. When I get that mount off to modify it I'll show you what I mean. My bad, on that one.
I did plop it on the floor and give it some juice. Throttle is WAY too much. I go from a low hum to what seems like 40 miles an hour quicker than I can cut throttle. I had a feeling it would be that way, and was one of the reasons I wanted the arduino in the loop. Tonight it wasn't. I know I can adjust the transmitter, but I want it built into the walker so no matter what transmitter gets used, it will work right. It DID move, both sides, forward and reverse, it just did it in a rather, well, uncontrolled manner.
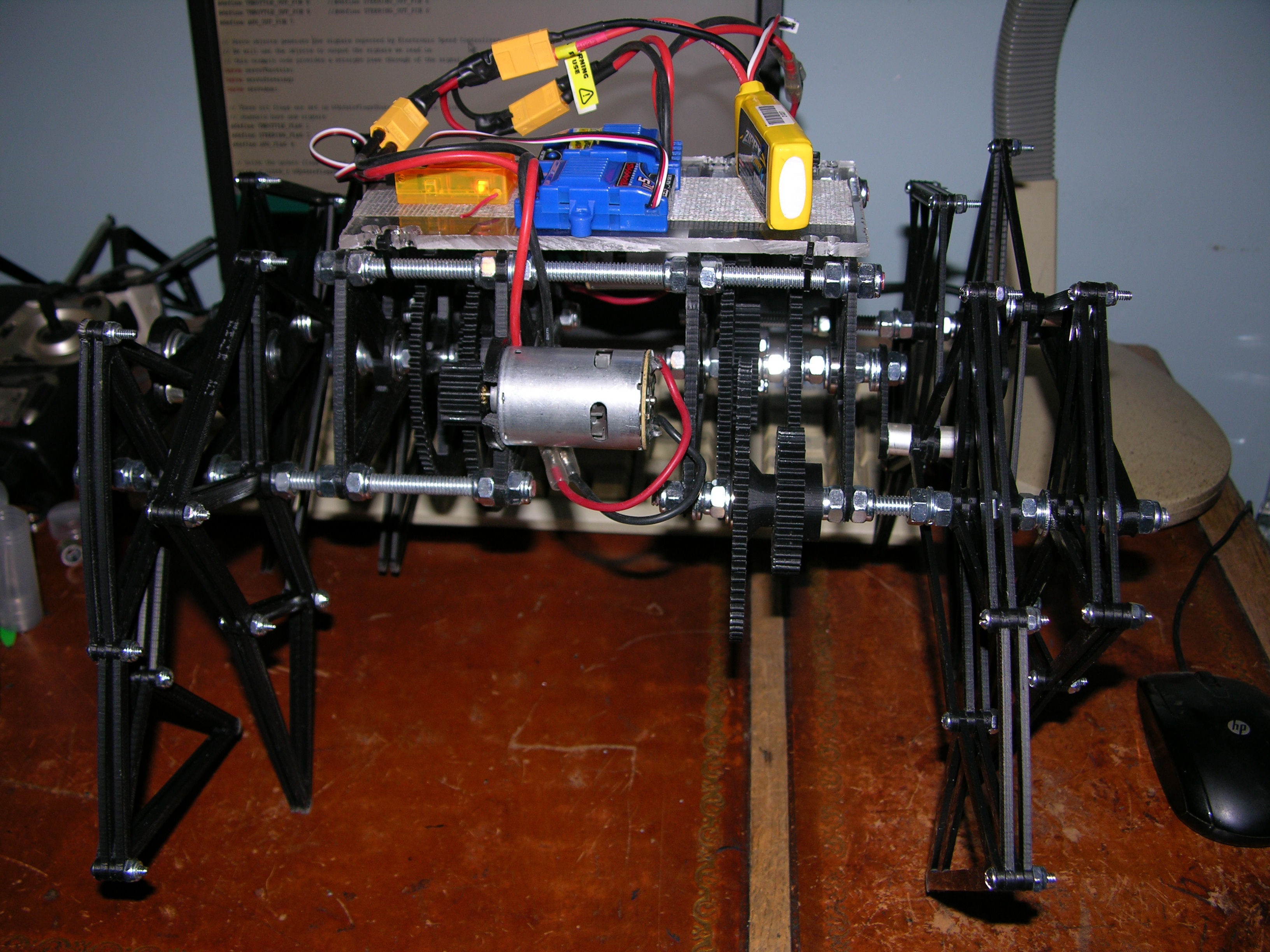
Anyway, here's what she looks like all put together. I just stuck a scrap piece of acrylic on top and zip tied it down, then stuck the electronics on it with double sided tape. Good enough for a first test.
![]()
I think she'll work nicely for now, but a couple of things I think I'm going to change, just from the way she acted tonight. First, fix the motor mount. Then I think I'll print out some of the leg parts in carbon fiber. Getting too much flexing for my comfort. I also can see some design changes in the leg design to stiffen them up a bunch, and even work more efficient.
Stay tuned, hopefully video of her walking coming soon...
-
Camera is Here.
12/15/2015 at 23:17 • 0 commentsGotta love shipping this time of year! Ordered the camera for this project yesterday morning and it's here already! And it was FREE shipping! Like I said, gotta love it. I'm going with a Wifi camera because I don't want to haul around my Quad FPV ground station everywhere I haul this thing. I'm not worried about the little bit of lag because, face it, this thing's not going to race around the room fast enough to make the lag unacceptable. The battery is still charging, but I turned it on long enough to see the video quality, and it's just fine. Think this will do nicely. :)
![]()
-
Second Gear Box Done.
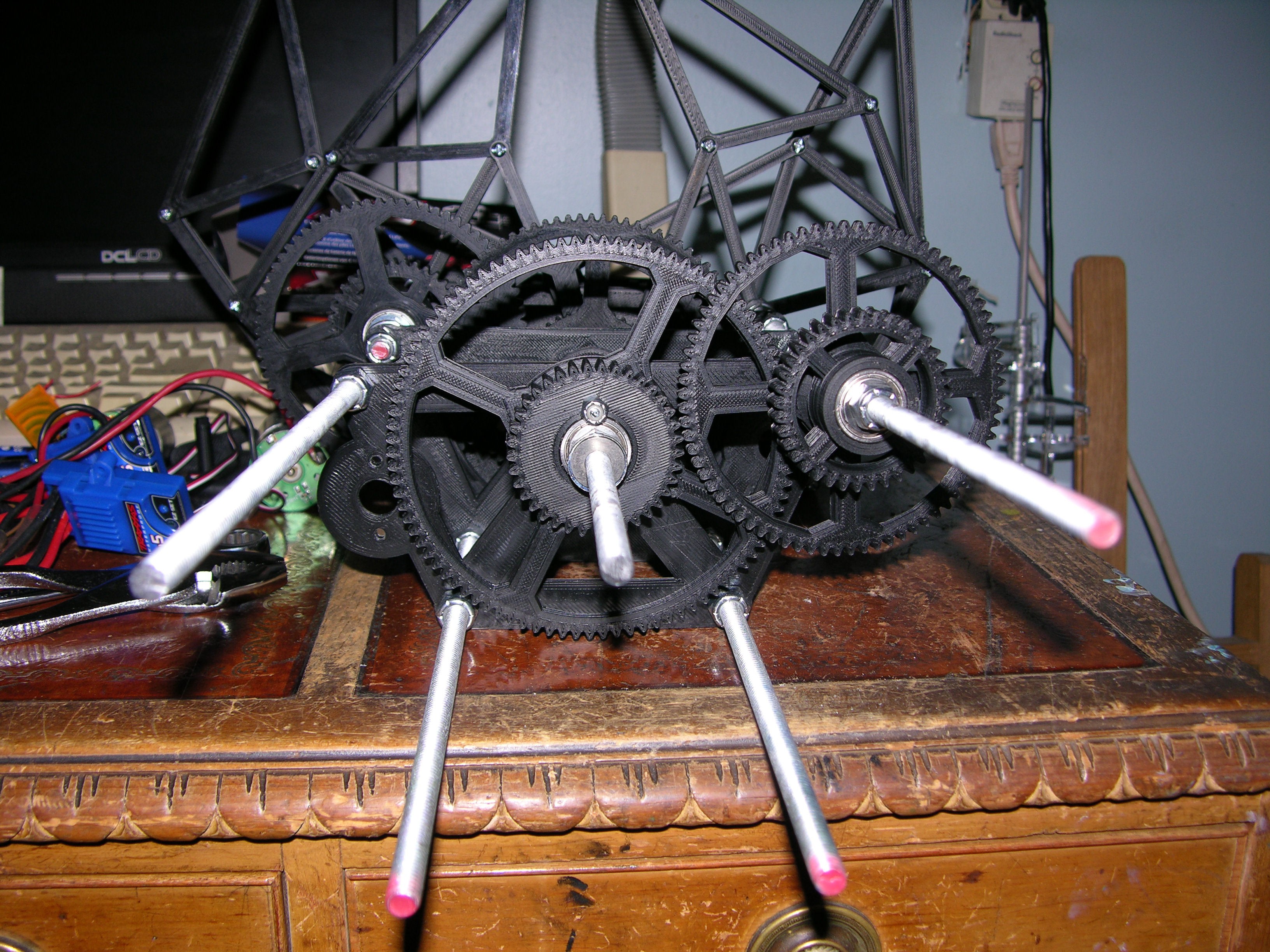
12/15/2015 at 19:04 • 0 commentsEver wake up at 2AM and not been able to get back to sleep? Well, I did, and I figured I might as well make the best of it so I started printing the last two gears. Result is that part is done and over with. Had some problems keeping the two bearings on the main gear in place, so I drilled two holes right up next to the bearing and put in two 6-32 X 3/4" bolts with nylon lock nuts. I enev took the time to take the first side back apart enough to add the bolts to that main gear too. That should keep them in place!
![]() Then I put the rest of the gear assembly together. All that's left is to print and install 16 more (at ~ 34 minutes each) triangles and the main part of the build will be done. With any luck my baby should be taking it's first tentative steps some time tomorrow. :D Oh, then I still need to come up with some feet for it, and design mounts to set the 3D printer on. No problem!
Then I put the rest of the gear assembly together. All that's left is to print and install 16 more (at ~ 34 minutes each) triangles and the main part of the build will be done. With any luck my baby should be taking it's first tentative steps some time tomorrow. :D Oh, then I still need to come up with some feet for it, and design mounts to set the 3D printer on. No problem!![]()
All in all happy with the way the builds going, but the proof's in the pudding, as they say (or at least use to say. My age is showing again...), and that will be when she walks across the floor.
-
Starting second side.
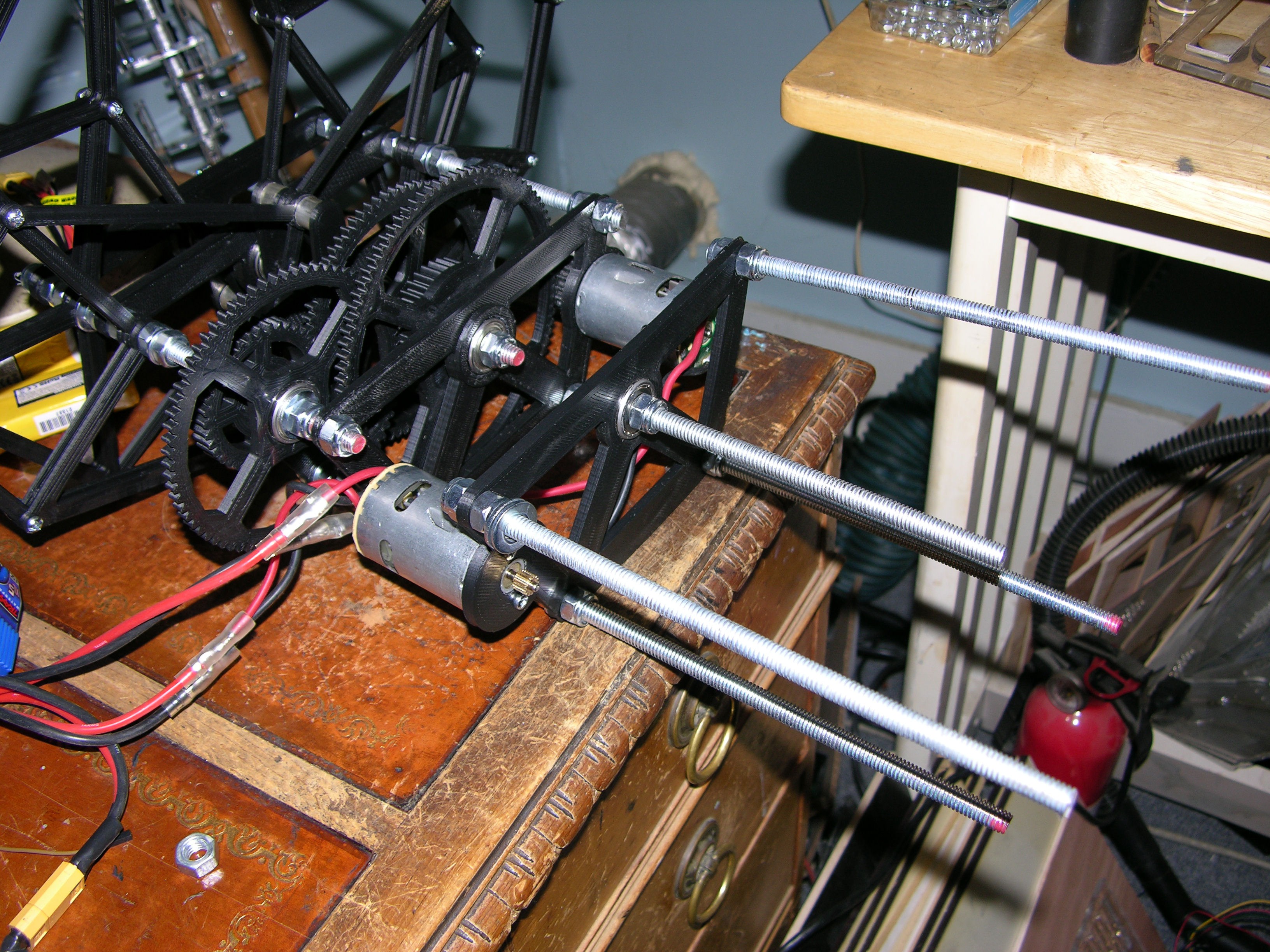
12/14/2015 at 21:21 • 0 commentsWell, starting to put together the second half. I modified the main frame to add a motor mount. Both motors now on and working. Going to be awhile before this goes much farther, I have a lot of parts to print! 16 of the triangles at 33 minutes each, and most of the gears for this half still to go. The gears are mostly around 4 to 5 hours each, and I need 4 more of them. Yeah, slow going right now...
![]()
-
Still printing parts....
12/14/2015 at 18:12 • 0 commentsIt's going to take a LONG time to get all the parts printed out. Easily well over one hundred printed parts by the time it's all said and done, and some of them are over four and a half hours each. I do have one advantage in that regard: where I live is not only the home of the Midwest RepRap Festival (a place I intend to show this off this spring!), but it's also the home of SeeMeCNC and their great delta printers. Being friends with the crew there helps a lot, I need anything I just hop across town and sit and bullshit with them for a while. I like their printers enough I even got my wife a job there! Lol.
I bring that up for another reason: My intention is to mount one of their Rostok Max V2 3D printers on this thing, and with the addition of the WIFI camera I just ordered for it, drive it around FPV. I might even let them take it to shows with them, if they ask real nice! :P
Remote Control Land Strider
I got it in my head to build a Land Strider, pretty much just because I think they're neat.

 Then I put the rest of the gear assembly together. All that's left is to print and install 16 more (at ~ 34 minutes each) triangles and the main part of the build will be done. With any luck my baby should be taking it's first tentative steps some time tomorrow. :D Oh, then I still need to come up with some feet for it, and design mounts to set the 3D printer on. No problem!
Then I put the rest of the gear assembly together. All that's left is to print and install 16 more (at ~ 34 minutes each) triangles and the main part of the build will be done. With any luck my baby should be taking it's first tentative steps some time tomorrow. :D Oh, then I still need to come up with some feet for it, and design mounts to set the 3D printer on. No problem!