Eric Hertz
Eric Hertz-
Relateds + Audio-Amp Motor-Driver
10/30/2016 at 12:40 • 0 commentsThis project has fallen to the way-side...
There've been lots of related-sub-projects since the last log...
I should link those. (TODO)
One is @johnowhitaker's #Mini PCB printer, which I'm ecstatic to be a part of.
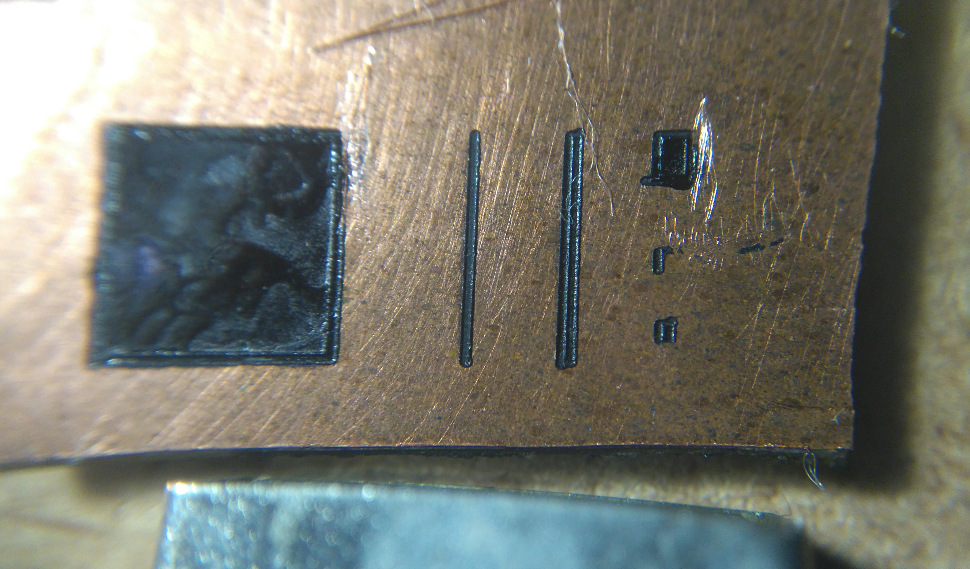
This guy uses a laser-diode from a DVD-drive to melt laser-printer toner directly onto bare copper-clad board as an etch-resist. There's a bit of fine-tuning involved, but I think with enough practice this could be quite the interesting/useful technique for many things. PCB-etching, of course. Also, maybe, creating "silk-screen" style labels for instrument-panels, and more. It's a bit of a bummer I've not put more effort into that fine-tuning, as I really think this could be useful.
![]()
![]() johnowhitaker is *way* better at getting actual CNC-machines up-and running than I... Here's my first "hand-drawn" experiment, which was very promising, the squiggle in the upper-left.
johnowhitaker is *way* better at getting actual CNC-machines up-and running than I... Here's my first "hand-drawn" experiment, which was very promising, the squiggle in the upper-left.![]()
Interesting aside, just occurred to me. A little setup, first: Using this method makes a "trace" of solid plastic wherever the laser passed-over.
![]()
When the laser's not adjusted to the right power to heat the underlying copper, that solid plastic trace doesn't adhere to the copper, and can actually be pealed-up from the surface. This might be useful for, e.g. "isolation-routing"![]() Or, which I just-now thought of, creating a stencil/silk-screen.
Again, for face-plate labels, once the solid "traces" are removed, the
labels could be spray-painted onto the surface.
Or, which I just-now thought of, creating a stencil/silk-screen.
Again, for face-plate labels, once the solid "traces" are removed, the
labels could be spray-painted onto the surface.Hmmmm... Similar could be used for spray-paint solder-masks... Hmmm...
---------
As far as its direct-relation to *this* project... Well, briefly, I've ported GRBL to PIC32 and abstracted it a bit so it should be more-easily ported to other architectures. Additionally, I added the option for direct-control of steppers via directly-wired H-Bridges (rather than using Step/Dir stepper-driver boards), which should also be somewhat easily modified for e.g. driving DC-motors with optical-encoders (like used in this project). That GRBL-abstraction was a *much* larger undertaking than I expected. But now that it's been done, any further modification should be quite a bit simpler.
GRBL, of course, would be quite-handy for this project. I'd already developed HPGL-based software to do the same... it's not perfect, but definitely functional. And, usually, I have a tendency to "reinvent the wheel." But G-Code is well-supported these days, and G-Code "senders" are pretty-durn-sophisticated. So, a new path for me: abandoning my old home-brew motion-control software in favor of something much-better-established, more fully-implemented, and open-source.
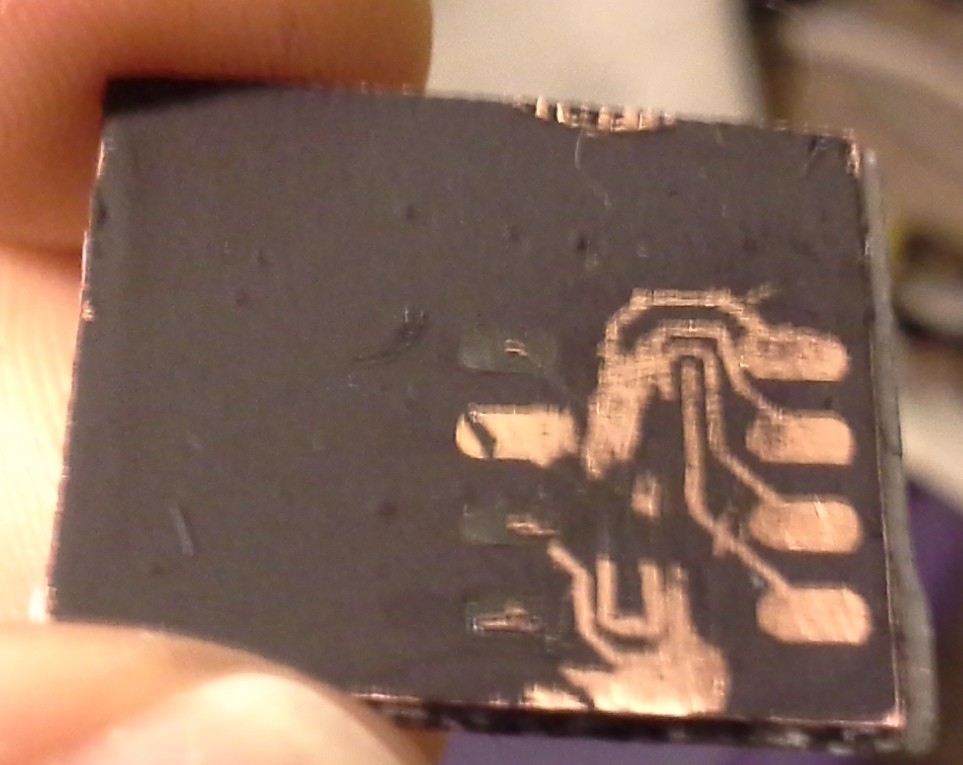
Haha, here's a ridonculous image where I tried to use this project for long/skinny PCBs:
![]() It's not a bad idea, but gravity doesn't have to be your enemy, and in fact can be your friend (In other words: turn the danged setup on its side!)
It's not a bad idea, but gravity doesn't have to be your enemy, and in fact can be your friend (In other words: turn the danged setup on its side!)-------------
Oy, none of that was even the point of this log... The point of this log was:
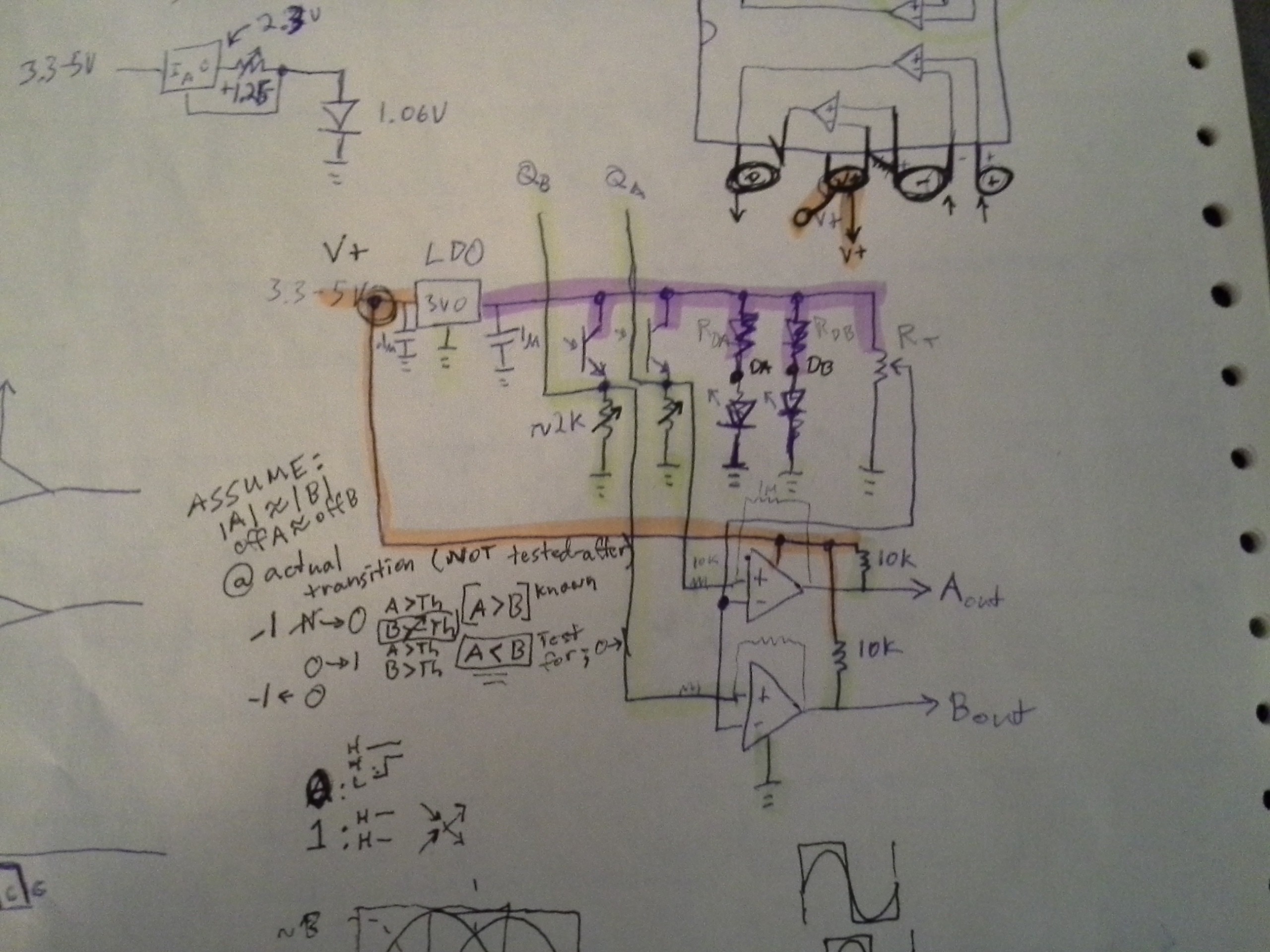
I ran out of solderless-breadboards, so had to take apart one of my old projects, which *was* for this project... and I wanted to make sure I had the schematic somewhere so I could repeat it... Whelp, I didn't put that on this project's page, for some ridonculous reason... and finding it was a pain... so here it is:
![]()
Briefly: I'd been doing experiments with using linear audio-amplifiers as motor-drivers. Not sure exactly why, but definitely a curiosity, and I'm pretty proud of that circuit... That circuit takes a PWM-input, toggling between 0V and 3.3V, and outputs an analog voltage that varies, roughly, from -1.5V to 1.5V. (Yeah, I have a single-supply linear audio-amplifier chip which requires a 0V-centered input-signal. Weird, eh?) And, I think, this circuit can be tuned such that quick/large-changes in PWM-value result in pretty-quick changes on the output-voltage, but that has yet to be thoroughly-explored.
If curious, check around the logs at that project-page #Random Ridiculosities and Experiments.
--------
And, on that note, and briefly-touched-on in the previous log on this project-page... I also worked quite a bit on #anaQuad!, which uses the *analog* output of optical-encoders (such as those found on old computers' ball-mice, or even some optical-encoder modules, and even a couple hall-effect sensors on an old brushless-DC motor like those found in CD/floppy spindles) to *greatly* increase the precision... With anaQuad, a 72-slot encoder can precisely resolve 1152 (or more!) different positions per revolution.
![]() It does-so by detecting *crossover* between the two analog input-channels, making it surprisingly noise-immune (for an analog signal) and adding a bit of inherent hysteresis. And, the code is pretty fast... instruction-count-wise, from entry-to-exit of detecting a change in position, it's on-par with detecting regular ol' 4x digital-quadrature.
It does-so by detecting *crossover* between the two analog input-channels, making it surprisingly noise-immune (for an analog signal) and adding a bit of inherent hysteresis. And, the code is pretty fast... instruction-count-wise, from entry-to-exit of detecting a change in position, it's on-par with detecting regular ol' 4x digital-quadrature.
-
Ridonculous Encoder Endeavors
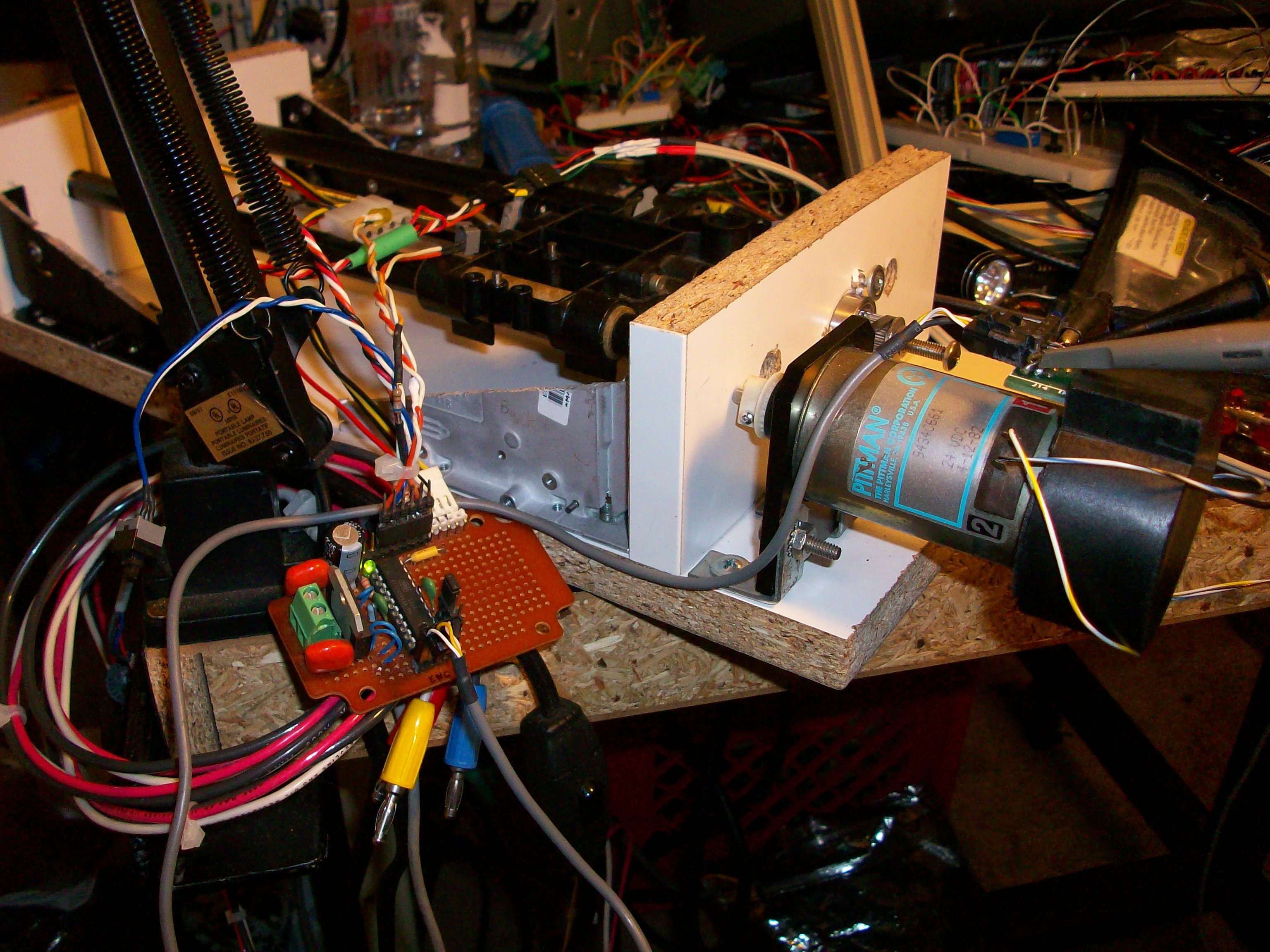
02/24/2016 at 14:16 • 0 commentsmy old "oneAxisHolder" project was AVR-based and ran on 5V...
I hacked the encoder attached to my motor to work well at 5V by replacing some resistors with potentiometers. This encoder's circuit... well, it's *simple*; it just has two IR(?) LEDs, two photo-transistors, and four resistors.
So, when I moved to my "multiAxisHolder" which is now PIC32-based, those resistor-values didn't work at 3.6V. Well, shit, I ain't bouts to hack those resistors again, and plausibly have to do it *again* if I later decide to use it with a 5V system... so:
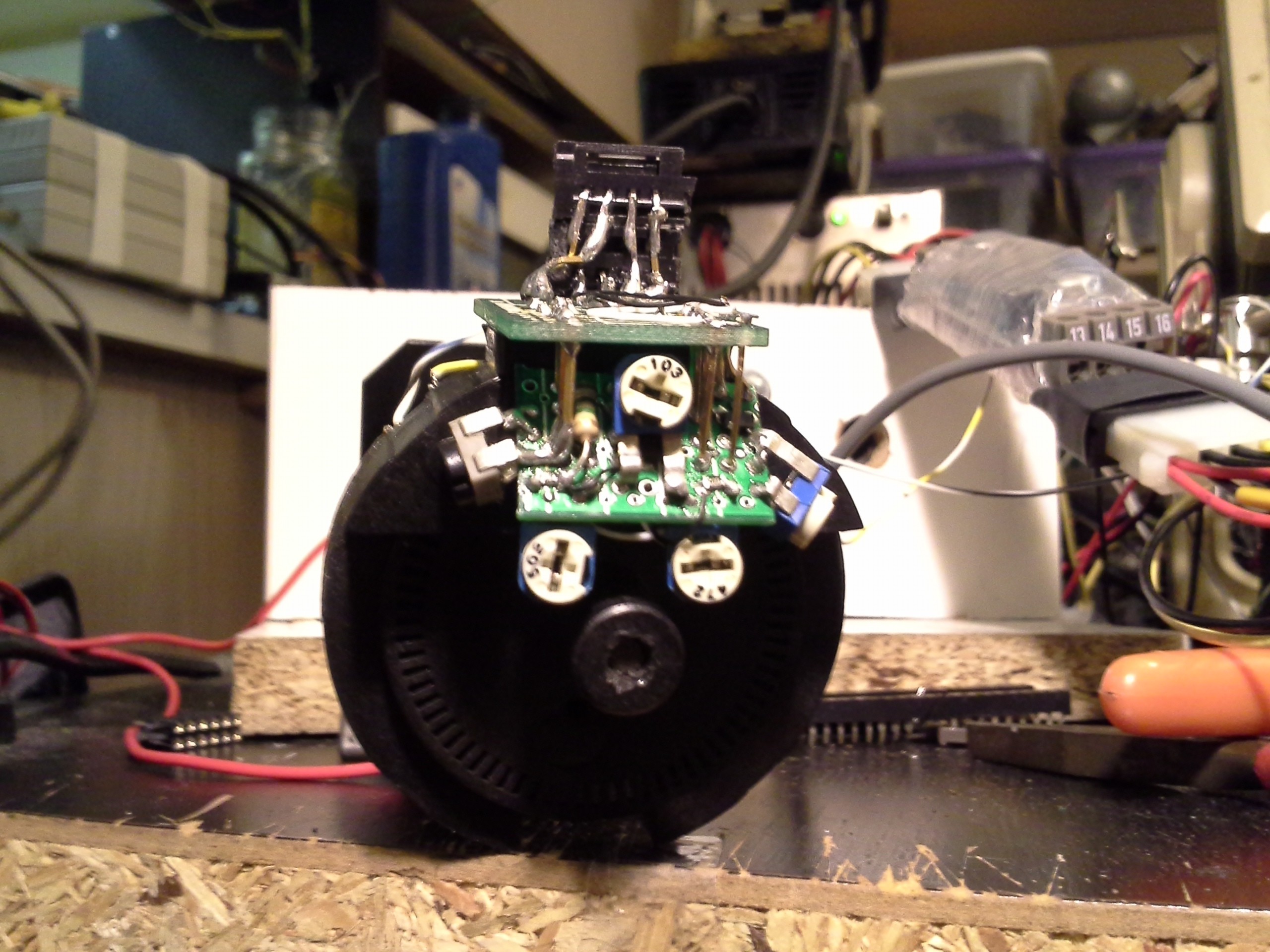
![]()
This dandy thing is soldered to the original encoder's PCB where the resistors were originally located... (plus a few extra holes I drilled in empty-space).
Stupid thing took several days to assemble, and couldn't be tested until it was completely assembled and soldered to the original board, so I was *really* cautious with every connection, and it worked right off the bat :)
It's more than just a bunch of pots. Here we have a 3.0V LDO running the LEDs and photo-transistors. Under the center pot is a comparator running off the source-voltage. The center pot sets the threshold-value for the comparators. The four remaining pots set the values for the phototransistors and LEDs.
This part's kinda funky. The original circuit had a 330ohm resistor for one LED and a 451ohm 1% resistor hacked-in for the other. It would seem these diodes have differing brightness?! Or maybe they're not perfectly-aligned or something... Anyways, it's handy having pots for all these things as I've been doing some experimenting. I'll come back to that.
The new board and potentiometers *just* fit inside the encoder's housing when assembled, which is why it's so... 3-dimensional (yes, it's mounted at about a 70degree angle). It's *cram-packed* both top and bottom.
![]()
So, now, it will run off 5V down to 3.2V, give a digital output at that value, and not have to be recalibrated for a different supply-voltage.
As for experimenting...
I have some ideas about using the *analog* output from the photo-transistors as a means to increase the resolution. https://hackaday.io/project/9351/log/32010-quadrature-encoders-with-analog-output
But I haven't started coding that, and I wanted to get this thing running with my current system... So, I included connectors for both digital-output and analog-output. Also, past-experiments with ball-mouse encoders show similarly analog-output... so this should be a pretty versatile and reliable/sturdy testing system for stuff like that if I decide to feed them into, say, the microcontroller's comparator-inputs or even just the schmitt-triggered digital inputs
With careful adjustment of all four potentiometers, it's possible to get what looks almost like a perfect sine-wave from each channel, running from about 0V to about 2.5V, so... got some 'sperimentin' to do.
And, yeah, those comparators are doing their jobs quite well, system's back up and running!
Oh, yeah, I'm running the motor off an audio-amplifier IC... again for the sake of experimenting. https://hackaday.io/project/9351-blogifying-io/log/30930-currently-audio-amp-motor-driver-cnc-machine
-
PPS = Picking Pins Sucks
01/14/2016 at 08:06 • 2 comments//PIC32MX370F512H-64TQFP: // * = 5V Tolerant (? Marked Gray) // ! = RF6 Cannot be used as a change-notification! (Table 2, Note 2) // % = Pins 13-18 are programming/debugging pins... // See Note below. // // VDD = V+ // VSS = GND // SDA1 // SCL1|SCK1 // RC13 RD11 RD9 VSS RC12 RG2 | RF6 RF3 // RC14 | RD0 | RD10| RD8 | RC15| VDD | RG3 | RF2 | // | | | | | | | | | | | | | | | | // -------------------------------------------------- // | 48 47 46 45 44 43 42 41 40 39 38 37 36 35 34 33 | // | * * * * * * * * * * | // RD1 --|49 ! *32|-- RF5/SCL2 // | | // RD2 --|50 *31|-- RF4/SDA2 // | | // RD3 --|51 30|-- RB15 // | | // RD4 --|52* 29|-- RB14 // | | // RD5 --|53* 28|-- RB13/TDI // | | // RD6 --|54* 27|-- RB12/TCK // | | // RD7 --|55* 26|-- VDD // | | //VCAP --|56 25|-- VSS // | | // VDD --|57 24|-- RB11/TDO // | | // RF0 --|58* 23|-- RB10/TMS // | | // RF1 --|59* 22|-- RB9 // | | // RE0 --|60* 21|-- RB8 // | | // RE1 --|61* 20|-- AVSS // | | // RE2 --|62 19|-- AVDD // | | // RE3 --|63* %18|-- RB7 // | | // RE4 --|64 * % % % %%17|-- RB6 // \ 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 | // \------------------------------------------------- // | | | | | | | | | | | | | | | | // | RE6 | RG6 | RG8 | RG9 | VDD | RB4 | RB2 | RB0 // RE5 RE7 | RG7 /MCLR VSS RB5 RB3 RB1 // SCK2 // //NOTE: // I2C is NOT remappable // THESE ARE ALL 5V Tolerant // SDA1 = 36 RG3 // SCL1 = 37 RG2 // SDA2 = 31 RF4 // SCL2 = 32 RF5 // SPI Clock Pins are NOT remappable // SCK1 = 35 RF6 (5V Tolerant) // SCK2 = 4 RG6 // Programming/Debugging pins // These *should* be usable, but I've had some difficulty in the past // PGED/C# // PGED1/C1 = 16/15 // PGED2/C2 = 18/17 // PGED3/C3 = 13/14 // //1 AN22/RPE5/PMD5/RE5 33 RPF3/RF3 //2 AN23/PMD6/RE6 34 RPF2/RF2 //3 AN27/PMD7/RE7 35 RPF6/SCK1/INT0/RF6 //4 AN16/C1IND/RPG6/SCK2/PMA5/RG6 36 SDA1/RG3 //5 AN17/C1INC/RPG7/PMA4/RG7 37 SCL1/RG2 //6 AN18/C2IND/RPG8/PMA3/RG8 38 VDD //7 MCLR 39 OSC1/CLKI/RC12 //8 AN19/C2INC/RPG9/PMA2/RG9 40 OSC2/CLKO/RC15 //9 VSS 41 VSS //10 VDD 42 RPD8/RTCC/RD8 //11 AN5/C1INA/RPB5/RB5 43 RPD9/RD9 //12 AN4/C1INB/RB4 44 RPD10/PMCS2/RD10 //13 PGED3/AN3/C2INA/RPB3/RB3 45 RPD11/PMCS1/RD11 //14 PGEC3/AN2/C2INB/RPB2/CTED13/RB2 46 RPD0/RD0 //15 PGEC1/VREF-/CVREF-/AN1/RPB1/CTED12/RB1 47 SOSCI/RPC13/RC13 //16 PGED1/VREF+/CVREF+/AN0/RPB0/PMA6/RB0 48 SOSCO/RPC14/T1CK/RC14 //17 PGEC2/AN6/RPB6/RB6 49 AN24/RPD1/RD1 //18 PGED2/AN7/RPB7/CTED3/RB7 50 AN25/RPD2/RD2 //19 AVDD 51 AN26/RPD3/RD3 //20 AVSS 52 RPD4/PMWR/RD4 //21 AN8/RPB8/CTED10/RB8 53 RPD5/PMRD/RD5 //22 AN9/RPB9/CTED4/PMA7/RB9 54 RD6 //23 TMS/CVREFOUT/AN10/RPB10/CTED11/PMA13/RB10 55 RD7 //24 TDO/AN11/PMA12/RB11 56 VCAP //25 VSS 57 VDD //26 VDD 58 RPF0/RF0 //27 TCK/AN12/PMA11/RB12 59 RPF1/RF1 //28 TDI/AN13/PMA10/RB13 60 PMD0/RE0 //29 AN14/RPB14/CTED5/PMA1/RB14 61 PMD1/RE1 //30 AN15/RPB15/OCFB/CTED6/PMA0/RB15 62 AN20/PMD2/RE2 //31 RPF4/SDA2/PMA9/RF4 63 RPE3/CTPLS/PMD3/RE3 //32 RPF5/SCL2/PMA8/RF5 64 AN21/PMD4/RE4 // // 5V Tolerant: // 7 /MCLR // 31 RF4 // 32 RF5 // 33 RF3 // 34 RF2 // 35 RF6 // 36 RG3 // 37 RG2 // 42 RD8 // 43 RD9 // 44 RD10 // 45 RD11 // 46 RD0 // 52 RD4 // 53 RD5 // 54 RD6 // 55 RD7 // 58 RF0 // 59 RF1 // 60 RE0 // 61 RE1 // 63 RE3 // 7 /MCLR // 46 RD0 // 52 RD4 \ // 53 RD5 | // 54 RD6 | // 55 RD7 | 8bits // 42 RD8 | // 43 RD9 | // 44 RD10 | // 45 RD11 / // 60 RE0 // 61 RE1 // 63 RE3 // 58 RF0 \ // 59 RF1 | // 34 RF2 | // 33 RF3 | 7bits // 31 RF4 | (SDA2 I2C) // 32 RF5 | (SCL2 I2C) // 35 RF6 / (SCK1 SPI) // 37 RG2 (SCL1 I2C) // 36 RG3 (SDA1 I2C) // PWM Pins: // OC1, OC2: // RD1 OC1,OC2 // RG9 OC1,OC2 // RB14 OC1,OC2 // RD0 OC1,OC2 // RD8 OC1,OC2 // RB6 OC1,OC2 // RD5 OC1,OC2 // RF3 OC1,OC2 * // RF6 OC1,OC2 // RF2 OC1,OC2 // OC3: // RD2 OC3 // RG8 OC3 // RF4 OC3 // RD10 OC3 // RF1 OC3 // RB9 OC3 // RB10 OC3 // RC14 OC3 // RB5 OC3 // OC4: // RD3 OC4 // RG7 OC4 // RF5 OC4 // RD11 OC4 // RF0 OC4 // RB1 OC4 // RE5 OC4 // RC13 OC4 // RB3 OC4 // RF3 OC4 * // OC5: // RD9 OC5 // RG6 OC5 // RB8 OC5 // RB15 OC5 // RD4 OC5 // RB0 OC5 // RE3 OC5 // RB7 OC5 // RB2 OC5 // RB0 OC5 // RB1 OC4 // RB10 OC3 // RB14 OC1,OC2 // RB15 OC5 // RB2 OC5 // RB3 OC4 // RB5 OC3 // RB6 OC1,OC2 // RB7 OC5 // RB8 OC5 // RB9 OC3 // RC13 OC4 // RC14 OC3 // RD0 OC1,OC2 Tolerant // RD1 OC1,OC2 // RD10 OC3 Tolerant // RD11 OC4 Tolerant // RD2 OC3 // RD3 OC4 // RD4 OC5 Tolerant // RD5 OC1,OC2 Tolerant // RD8 OC1,OC2 Tolerant // RD9 OC5 Tolerant // RE3 OC5 Tolerant // RE5 OC4 // RF0 OC4 Tolerant // RF1 OC3 Tolerant // RF2 OC1,OC2 Tolerant // RF3 OC1,OC2,OC4 Tolerant // RF4 OC3 Tolerant // RF5 OC4 Tolerant // RF6 OC1,OC2 Tolerant // RG6 OC5 // RG7 OC4 // RG8 OC3 // RG9 OC1,OC2 //Mounted on the TQFP32-100 adapter // outter numbers match the adapter's labels // NOTE: Adapter labels are a bit confusing... // they're labelled below the holes // // GND V+ // ^ ^ // | .1uF | // +---||---+ SDA1 // | | SCL1|SCK1 // RC13 RD11 RD9 VSS RC12 | RG2 | RF6 RF3 // RC14 | RD0 | RD10| RD8 | RC15| VDD | RG3 | RF2 | // 75 74 73 72 71 70 69 68 67 66 65 64 63 62 61 60 // -------------------------------------------------- // | 48 47 46 45 44 43 42 41 40 39 38 37 36 35 34 33 | // | * * * * * * * * * * | // | ! | // RD1 85|49 ) ) *32|41 RF5/SCL2 // | ( ( | // RD2 86|50 ) ) *31|40 RF4/SDA2 // | ( ( | // RD3 87|51 ) ) 30|39 RB15 // | ( ( | // RD4 88|52* ) ) 29|38 RB14 // | ( ( | // RD5 89|53* ) ) 28|37 RB13/TDI----------->TDI // | ( ( | // RD6 90|54* ) ) 27|36 RB12/TCK----------->TCK // | ( ( | // RD7 91|55* ) ) 26|35 VDD----+---->V+ // 10uF TANT/CER | ( ( | === .1uF // GND<--||--VCAP 92|56 ) ) 25|34 VSS----+---->GND // | ( ( | // V+ <------VDD 93|57 ) ) 24|33 RB11/TDO----------->TDO // | ( ( | // RF0 94|58* ) ) 23|32 RB10/TMS----------->TMS // | ( ( | // RF1 95|59* ) ) 22|31 RB9 // | ( ( | // RE0 96|60* ) ) 21|30 RB8 // | ( ( | // RE1 97|61* ) ) 20|29 AVSS-----+----->GND // | ( ( | === .1uF // RE2 98|62 ) ) 19|28 AVDD-----+----->V+ // | ( ( | // RE3 99|63* ) ) %18|27 RB7 // | ( ( | // RE4 100|64 ) ) %17|26 RB6 // | * % % % % | // \ 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 | // \------------------------------------------------- // | | | | | | | | | | | | | | | | // | RE6 | RG6 | RG8 | RG9 | VDD | RB4 | RB2 | RB0 // RE5 RE7 | RG7 /MCLR VSS | RB5 RB3 RB1 // SCK2 | | | // \ | |.1uF // / 1k +||+ // \ | | // | .1uF| | // JTAG_RST (NYI) >---+------+-||--+ | // | | | | // _|o \ | | // |o / 10k | | // | \ | | // | | | | // v v v v // GND V+ GND V+ // JTAG Connector // Jumper? // 1 +3V3 -------o o---------> VDD // 2 GND // 3 TCK // 4 TDI // 5 TDO // 6 TMS // 7 JRST (NYI) // TODO: Heart (+button?) // Tx0/Rx0 on UART PPS pins...? -
More Motion Experiments, Oil=Good, Chickens, etc.
12/29/2015 at 10:13 • 2 commentsThe latest test is a loop something like:
Travel 8000 steps forward
Travel 8000 steps backward
double the speed and repeat (until the max-speed)
The 'oneAxisHolder' takes in a single byte at a time on its UART, representing -128 to 127 *steps* away from where it's at currently. So "speed" is entirely a factor of the transmitter, in this case a bash-script on my computer. I set it to send one byte at a time, at, as I recall, 0.03 seconds (which is *just about* the limit at 4800baud). There's some slight stuttering, as mentioned in the previous log, which I *believe* to be due to buffering on the computer-side... I've run into this one before, and never noticed it when controlled by a dedicated [micro]controller.
Adding oil to the screw-shaft was *definitely* an improvement... At the end of the last log/video you can hear some scraping. And, at high-speed the binding was so great at times that the motor would even stall (?!). That binding, grinding, scraping, and stalling has all but vanished even at high speeds with just a little motor oil.
Now it "buckocks" like a chicken... Interesting that hadn't been noticeable before.
On the closer rail, the glider is firmly physically attached to the carriage. At the farther rail, the glider "floats" in a little slot on the carriage (rather'n a hole). I think they do this so that the two rails don't need to be perfectly parallel (which was certainly appreciated during assembly!). The end-result, it seems, is that the carriage rides along the stationary floating "glider" until it hits an end-stop that causes the glider to move with the carriage. Thus... "Buckock!"
I'm hesitant to add oil to that part, but maybe unjustifiably so. The thing is, the gliders appear to be fiberglass... And for some reason that to me means somewhat permeable, which I suppose could mean expansion, which could be bad considering as it stands the gliders are *very* tight on the rails. This is all hypothesizing, on my part... Wisdom, anyone?
And, again, the 'oneAxisHolder' is quite handy for experiments like these, but doesn't quite suit [one of] my end-goal[s], which requires two motor/encoder pairs, one of which is to be used as a hand-lever.
So, on to designing the next circuit... plausibly for two axes... And doing-so has gotten side-tracked again into the [plausibly] "Ridiculous" realm... I'm experimenting, again, with using audio-amplifier chips to drive my motors. https://hackaday.io/project/8348-random-ridiculosities-and-experiments/log/29597-audio-amp-motor-driver-class-b-this-time (If you're looking for really cheap high-current audio-amps that could plausibly be *each* used as *four* motor-drivers, check that link, quick... Sale Ending TODAY!)
-
Days of fail, and finally it moves!
12/26/2015 at 13:23 • 1 commentAlright, so it was stupid, stupid, stupid of me...
Apparently at some point (yes I remember doing this, no I don't remember *leaving* it this way) I modified the script that outputs the commands to the motor-driver... To: instead of outputting raw binary for positional-changes, instead output user-friendly hex-values. I just wanted to verify the conversion was working properly (this is a bash script). Brilliant, right? Wrong. Yeah, don't forget to comment-out that line when you're using redirection ('>') for the script's output to the serial-port!
So, simply, the motor-driver takes a single-byte value, -128 to 127, which tells it how many steps to take... And of course the "user-friendly" version was outputting several ASCII bytes... which, of course, are *positive*. Thus, the motor was going both *positive* regardless of what value I gave it, AND went *really far* each time (a sum of all the bytes transmitted).
Duh. No more redirection of binary values. Use two separate output-streams, one for the terminal, one for the serial-port. This realization came *long* after looking into all sorts of other things... including some amount of certainty that the uC's R/C oscillator was drifting too much for my 4800baud serial transmission... (seriously?!). Well, my de-facto for all projects is to have a fading LED that cycles at a rate of 8 seconds... I measured 7.3. That's pretty far off, so completely reasonable it might've been responsible. So I popped the ol' scope on the serial signals and realized that my new USB->Serial converter is 3.3V, and I'd already determined that my uC's VIH-min is 3.5V... so... well it did work a few days ago, but probably isn't particularly reliable. But the data-timing...? Looks pretty durn accurate to me, certainly not a full bit off (which would cause the "stop" bit to be detected as a '1' in the most-significant data-bit, which might've explained the large motion... except that the MSB is the *sign* so... I dunno.). And of course, that's when I noticed it was transmitting *several* bytes at a time...
Back to the old USB->Serial converter, also. At least I know its inputs are 5V-tolerant (I added that long ago).
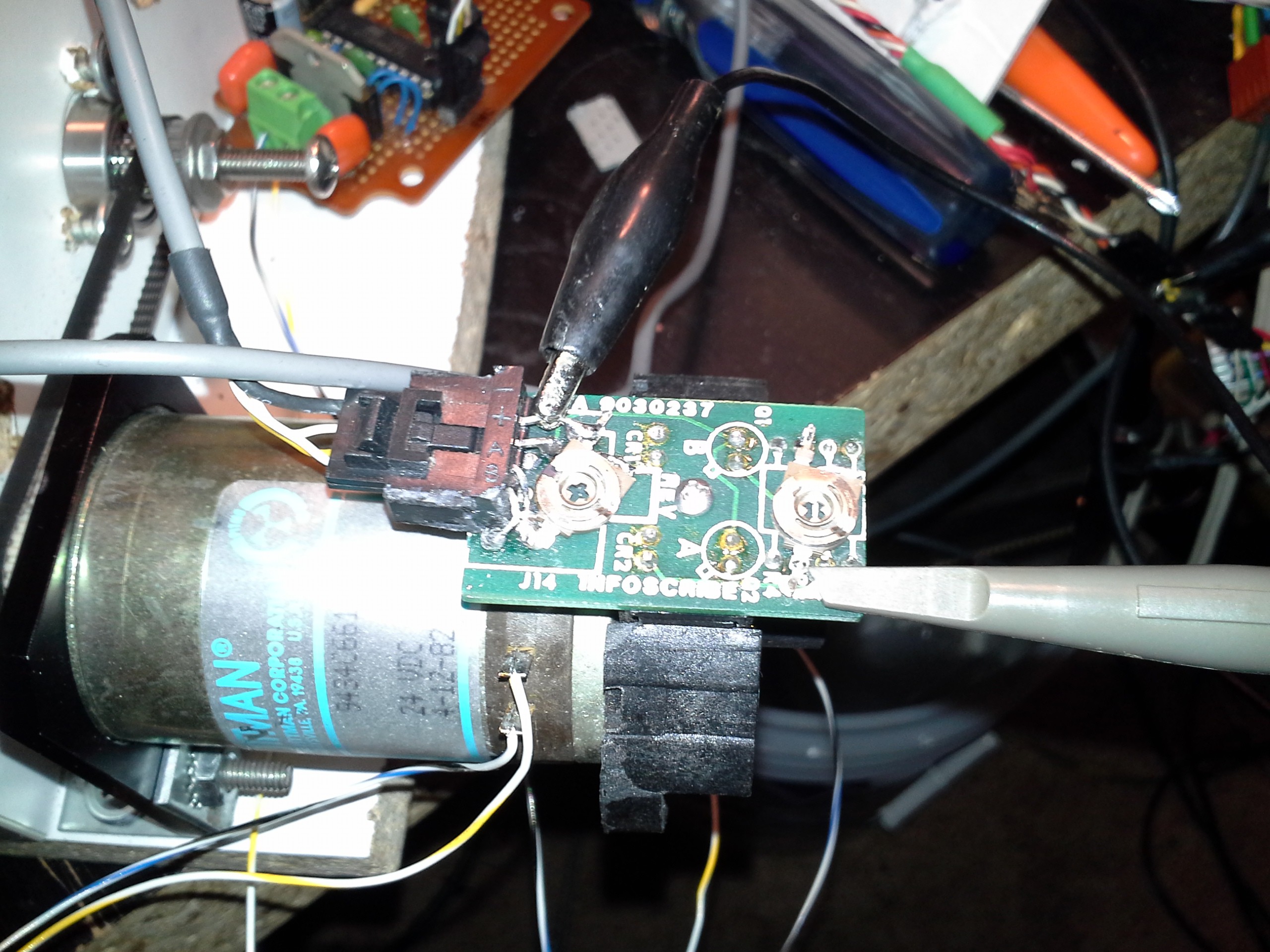
Oh, right, and the transistor-biasing issue... @K.C. Lee to the rescue again... I got all hung-up on trying to figure out a versatile solution, but wasn't getting anywhere. He suggests: just replace them dang 3.3k pull-down resistors with something higher, dagnabbit! So, I needed to see this thing moving again, dagnabbit! I cut them dang 3.3ks out of the circuit and soldered on some 20k potentiometers (and removed my transistor-buffer circuit entirely).
![]()
So, some observations: With the mouse-encoders I'd worked with previously, there seems to be some correlation with the pull-resistor values and the *speed* the transistors can respond. A higher value resistor, if I remember correctly, results in *slower* response. My theory being somewhat like that of the difference between ECL and TTL... ECL is faster than TTL because it keeps the transistors AWAY FROM saturation (ECL uses the linear range), Switching out of saturation takes time. Anyways, that's not (yet?) a problem here, since the motor's running *much slower* than the really-high-speed motors I had connected to the mouse-encoders.
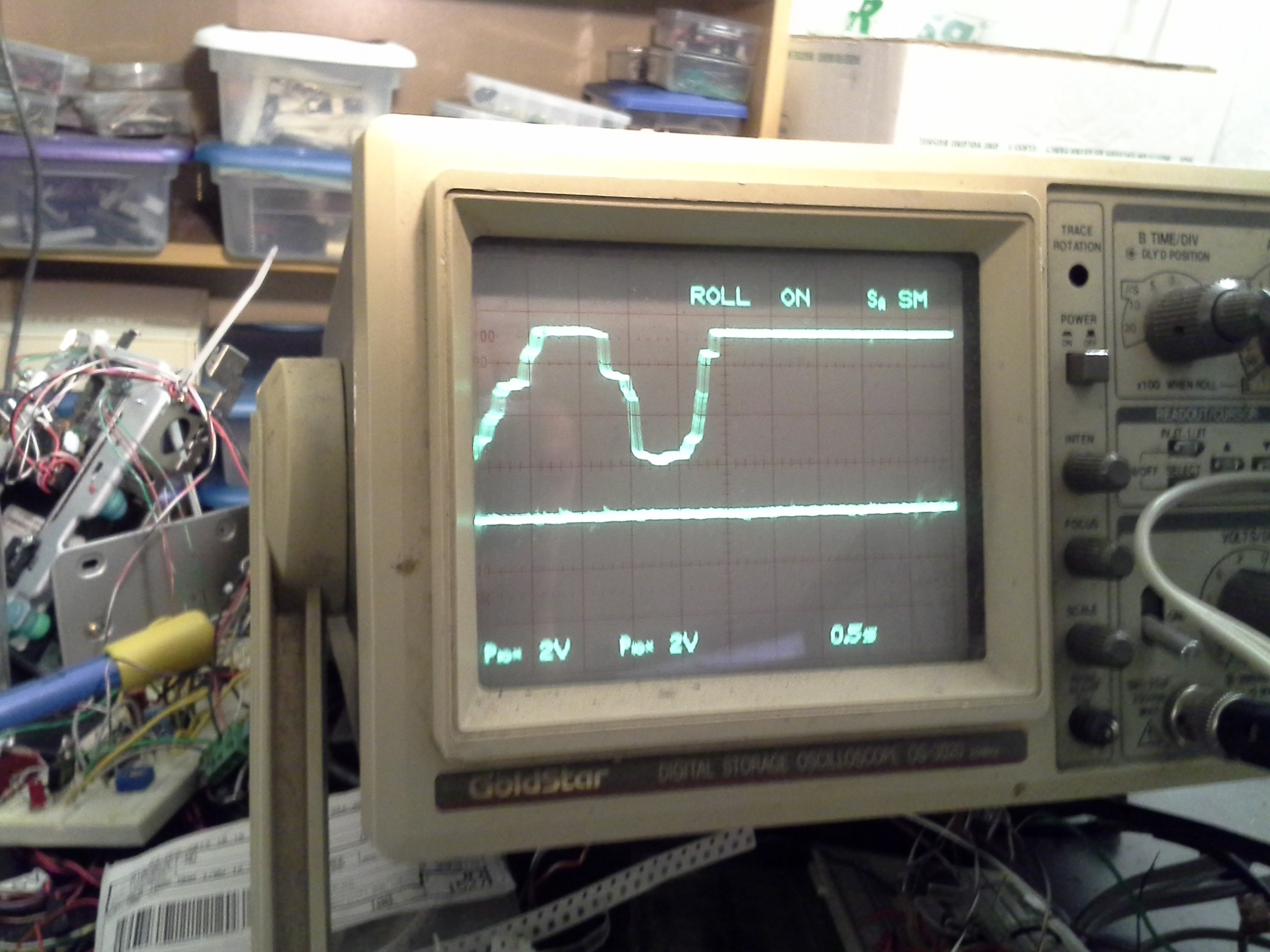
Increasing the resistance essentially increases the "amplification" of the signal... so whereas before it was somewhat sinusoidal, now it's closer to digital... rather, it's like an amplifier hitting its (upper) rail... There's still analog changes as the motor is rotated slowly between slot and shade(?), and it also appears to remain sinusoidal-ish at the lower-rail.
![]()
Thankfully, my microcontroller has Schmitt-triggers, and the system's now definitely within the VIHmin and VILmax ranges, so it seems alright. Though, I'm not certain the "threshold" is particularly well-defined... Imagine a sine-wave amplified *a lot*, with its bottom touching 0V and hitting the upper rail (5V) long before the sine-wave reaches its zero-crossing... Rather'n *square* pulses, I might be getting really skinny rectangles. As long as both quadrature channels keep those rectangles *in quadrature* then it's no problem except that it means the positional accuracy varies at two of the four measurable points in a quadrature-cycle... Something to ponder, but doesn't seem to have a noticeable effect.
As far as the PWM noise coupling in...? It might still be, I haven't 'scoped the receiving-end... But it's no longer going through my transistor "amplifiers" (and the cable is now shielded) so it should be a little more immune. It seems to be working fine!
Well, fine on the electronics-side... the mechanics are... built by me, with my tools and my supplies... At the very least, I think I need to oil this thing... Cooking-oil seemed to work great for tapping and drilling, but it gets kinda gummy and smelly after a while. Best buy some motor oil (will that be any better? This isn't a closed system... And WD-40 is a solvent, right? Not for long-term "oiling"?).
-
First Axis Encoder
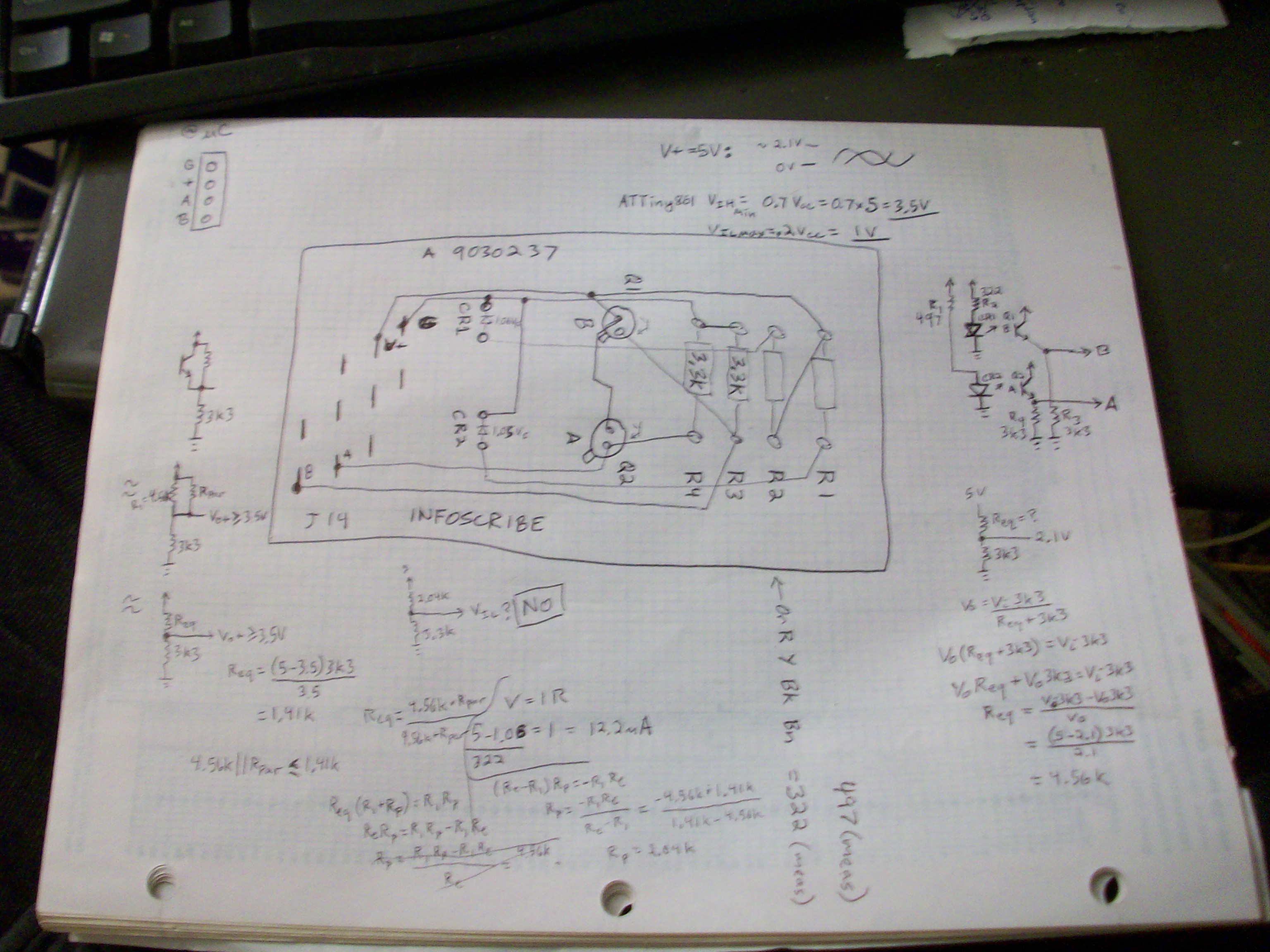
12/23/2015 at 16:14 • 3 commentsYesterday: FINALLY figured out the pinout of this encoder's circuit... Apparently it's just two photodiodes, two photo-transistors, and four resistors. Even most computer-mice I've seen have more sophisticated circuits, usually involving two resistors for each transistor... and some, I think, even tied the transistor's output to the diode, as a sort of amplifier feedback-loop. The signals coming out are usually somewhat sinusoidal, requiring a comparator at the receiving end... or at the very-least a forgiving Schmitt-trigger. Most motor-mounted encoders I've seen, even the ones made of discrete components like this one, have comparators or some other sort of digital-output-driver at the transmitting-end... would certainly help with noise-immunity... This motor's marked 1982, so maybe they were using analog power-control rather'n PWM, then switching noise wouldn't be as big a concern...
Regardless, the output swings from 0V to 2.1V with a 5V source. My microcontroller's digital inputs (despite schmitt-triggers) are rated for 3.5V VIH-min. So, not surprised it didn't detect any movement with my first attempt.
![]()
All that math was to determine whether I could get away with putting a pull-up resistor on the outputs to get it in range of a digital input... I calculated (based on the maximum output voltage) that the phototransistors look like a 4.56k resistor when fully-illuminated. So I'd need a ~2k pull-up resistor (in parallel to the transistor) to achieve 3.5V. Unfortunately, that would mean that the completely-dark case looks like a voltage-divider with a 2k upper-resistor and a 3.3k lower-resistor, so the output-voltage would be too high for VIL-Max = 1V.
(Much later note, per a comment from @K.C. Lee... How is it I didn't think of running the encoder off 5V, and my microcontroller off 3.3?).
I could modify this encoder's circuit-board pretty easily, there's plenty of space for hacking. Then I could've probably had it running in a couple hours. But I got sidetracked contemplating more-versatile options...
I've been using computer-mouse-encoders in projects over the past year-ish... those are similar in output to this. And I've got a few other encoders of questionable-output. So... what would be more versatile...?
Analog-comparators happened to be an easy-choice for my PIC32-based circuit, choosing a low threshold voltage. But, what if the transistors were low-side...? Then I'd have to change it to a higher threshold-voltage... either software would have to change, or there'd need to be a potentiometer added... Besides that, I only built that on a solderless-breadboard, and now entropy is setting in.
I came across my AVR-based "oneAxisHolder" (soldered) circuit from long ago, while cleaning the workbench... I used this in some early experiments in the past year or so, then switched over to the PIC32. The nice thing about the oneAxisHolder is that it's soldered-up and so far has been basically plug-and-play... RS-232 input to control the position, an encoder input, and a motor output... The PIC32 runs almost the exact same software, but I've improved it a little bit to handle things like using comparator-inputs. That code is *mostly* architecture-agnostic, so porting it back to the AVR would be pretty simple... but the oneAxisHolder's encoder inputs aren't soldered to Analog-comparator pins... And technically the AVR only has a single analog-comparator (though switching its inputs is possible, that wouldn't allow for using interrupts...)
But, they are soldered to pins that have ADCs... so that's a contemplation...
This has been another long-running consideration... With encoders like these, where the output is analog, rather'n digital, (which just happens to be commonly-associated with low-resolution encoders, in my collection) it might be possible to increase the position-resolution by using the analog values and ADCs... That's something that might be difficult, and not exactly in my mind-set at the moment. Thing is, of course, noise will *definitely* couple into these signals... So I forsee something a bit more like having two separate values, one is the Known position (accuracy?) determined by threshold-crossings... The other value would be a Determined position (precision?). It could plausibly be thought of like a floating-point number, but there could be some oddities with relying on it that way... e.g. say the threshold was just recently crossed on one of the quadrature outputs... Now its value decreases slightly... Does that mean it's reversed direction? So, of course, we look at the second encoder output, but its value has changed *extremely* slightly (being at the top of a sine-wave)... did its value change due to motion in the positive direction or the negative direction...? Was it noise that caused the decrease on the first output...? The whole scenario's a bit ambiguous. So, I don't know what this would be useful/reliable for, really... Positioning based on it is questionable... but maybe it could be used in something like speed-control, where we know the motor's always increasing in direction... I dunno.
So, back to versatility: I got to the point where... the oneAxisHolder is really handy, being kinda plug-n-play. Before the last recent use it was at least a couple years since I'd used it, and when I needed it again I just plugged it in (to an entirely different motor/system) and it worked. Nice. But this time it's a no-go, so where do I go from here...? Is it time to switch the pinout for analog-comparators (are they available?)? And think about how I'm going to set that threshold-voltage (versatilely)? Or is it time to start looking into the ADC method...? Or is it time to solder up the PIC32 version...? Or should I just hack this stupid circuit and get the danged axis moving?
And, WTF...? How could this AVR's inputs *possibly* be rated for VIH-Min=3.5V with a 5V source...?! Certainly I've connected 3.3V logic to these things before without a hitch... right? Weird.
![]()
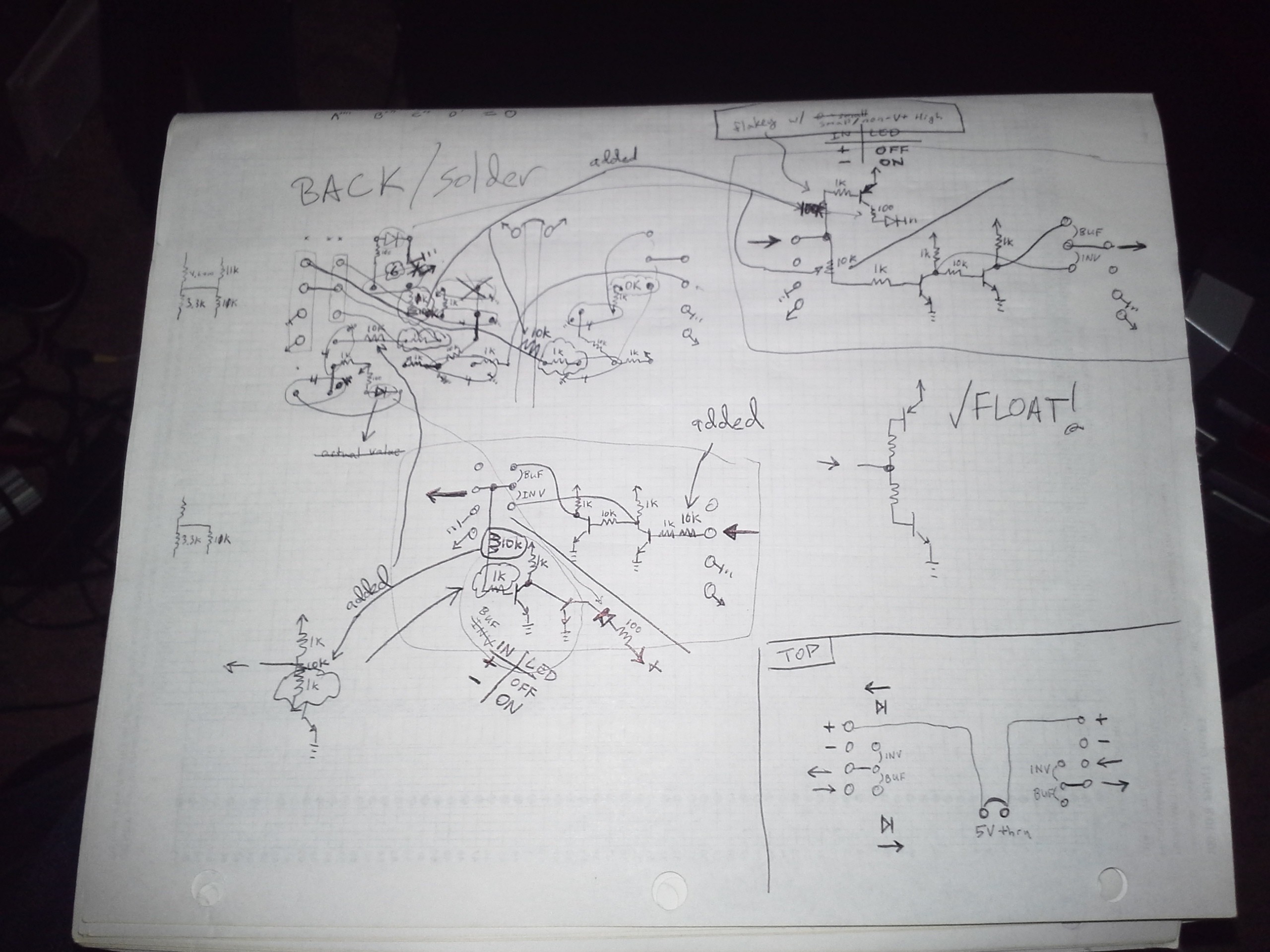
I got a bit overwhelmed and wrote most of this up... then found this TTL-level serial buffer/inverter I built a while back...
![]()
One of the devices I tried to hack had *inverted* serial output, so I built a jumper-switchable inverter/buffer for it (with LEDs). I used transistors instead of TTL, for some reason I don't really remember... I think I basically just felt like working with some transistors at the time. Oh, and I also wanted it to work as a level-shifter...
I just repurposed the Tx and Rx lines for the quadrature A and B channels, which required swapping one pin from the "device" connector to the "computer" connector. And... It worked! Sorta. One channel worked nearly perfectly... I got something like 4V signal-swing. The other side... almost nada.
Then I vaguely remembered having had some issues with it when I last used it... So I sat down and traced out the circuit and found some little gems I hadn't considered during its design.
![]()
For one thing, most of the inputs used only 1k resistors to the bases... so that's a big no-no in this case, connected to an output-resistance of ~3-5k. Even worse in one case, where the LED is driven by a PNP transistor, and the buffer/inverter by NPNs... We've got a voltage-divider attempting to drive a *stronger* voltage-divider (through the transistors). That was the signal that didn't work... replacing its base-transistors with 10k didn't quite do it, either... so I threw a 100k on the PNP transistor's base. Right? Wrong. Let's just say "ish" for both... The LED *barely* changes in brightness, but it does. Of course, the input voltage doesn't actually go high, so the PNP transistor never actually turns off. Duh. Oh well, that's just visual. The fix worked as far as the buffer/inverter go.
The other channel's LED was connected to the *output* side of the buffer/inverter circuit, so it shouldn't be a problem, right...? Wrong. Ish. The output is driven by an NPN transistor, emitter to ground, collector pulled-up with a 1k resistor. Cool. The LED is driven from that through a 1k base-resistor and NPN. Not cool. Another voltage-divider, explaining why the output voltage-swing was less than 5V (but functional).
Later we'll run into some more transistor-based unexpecteds... so it would seem transistors aren't really my forte... I guess I tend to think of them as full-on or full-off most of the time... Right? Wrong. Ish? No, just wrong.
Regardless, at that point, the circuit worked well enough to run motion-experiments! I'll save those results for the next log (or maybe next-to-next). Suffice to say, I had it running all last night, long enough to figure out (rather, verify) some potential issues with my hardware/mechanics.
So tonight I powered it up again to shoot some video of it running... and... now it runs forward every time. Even when I tell it to go in reverse. And, when I tell it to go 4 steps, it goes more like 40. So, we'll come back to that.
Suffice to say, though maybe not the *only* problem, the transistors kicked me in the butt, again. When they're not fully-off or saturated (e.g. when the encoders' *analog* output is somewhere mid-way) the circuit acts as a biased-transistor-circuit should... as an amplifier for tiny changes. And those tiny changes....? Definitely a majority are coming from the PWM of the motor. It's kinda cool, actually, and a reminder that transistors are *amplifiers*, not switches. (Maybe I can use this!)
I don't know what's changed since yesterday to make it run like this... One interesting observation is that the motor itself is responding normally, e.g. when I try to rotate it by hand, it snaps back to where it wants to be, in both directions. One theory is that the PWM coupling into the encoder signals doesn't really change the detected position except maybe one or two ticks. BUT, it's probably triggering *really fast* interrupts (~30kHz!) that might be hogging CPU time that would've been used for my bit-banged UART... So, maybe that helps to explain why I'm getting huge motion when requesting tiny changes, as well as reverse-motion. HOWEVER, again, why didn't I run into this yesterday...? First guess on that was that I moved things around after I turned it off yesterday, some of the wires were close to each other today... but reorienting to yesterday's orientation and separating the wires didn't help. So, I dunno.
 johnowhitaker is *way* better at getting actual CNC-machines up-and running than I... Here's my first "hand-drawn" experiment, which was very promising, the squiggle in the upper-left.
johnowhitaker is *way* better at getting actual CNC-machines up-and running than I... Here's my first "hand-drawn" experiment, which was very promising, the squiggle in the upper-left.

 Or, which I just-now thought of, creating a stencil/silk-screen.
Again, for face-plate labels, once the solid "traces" are removed, the
labels could be spray-painted onto the surface.
Or, which I just-now thought of, creating a stencil/silk-screen.
Again, for face-plate labels, once the solid "traces" are removed, the
labels could be spray-painted onto the surface. It's not a bad idea, but gravity doesn't have to be your enemy, and in fact can be your friend (In other words: turn the danged setup on its side!)
It's not a bad idea, but gravity doesn't have to be your enemy, and in fact can be your friend (In other words: turn the danged setup on its side!)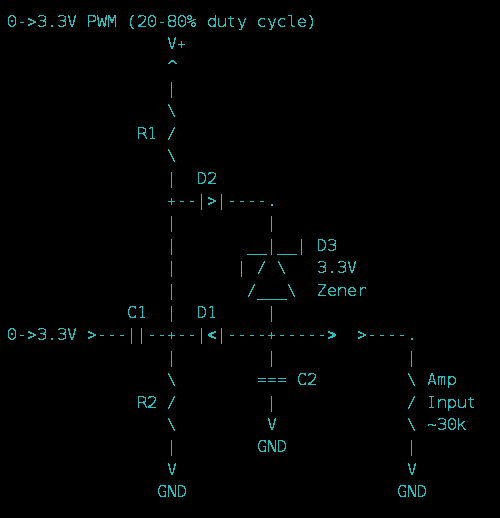
 It does-so by detecting *crossover* between the two analog input-channels, making it surprisingly noise-immune (for an analog signal) and adding a bit of inherent hysteresis. And, the code is pretty fast... instruction-count-wise, from entry-to-exit of detecting a change in position, it's on-par with detecting regular ol' 4x digital-quadrature.
It does-so by detecting *crossover* between the two analog input-channels, making it surprisingly noise-immune (for an analog signal) and adding a bit of inherent hysteresis. And, the code is pretty fast... instruction-count-wise, from entry-to-exit of detecting a change in position, it's on-par with detecting regular ol' 4x digital-quadrature.