0%
0%
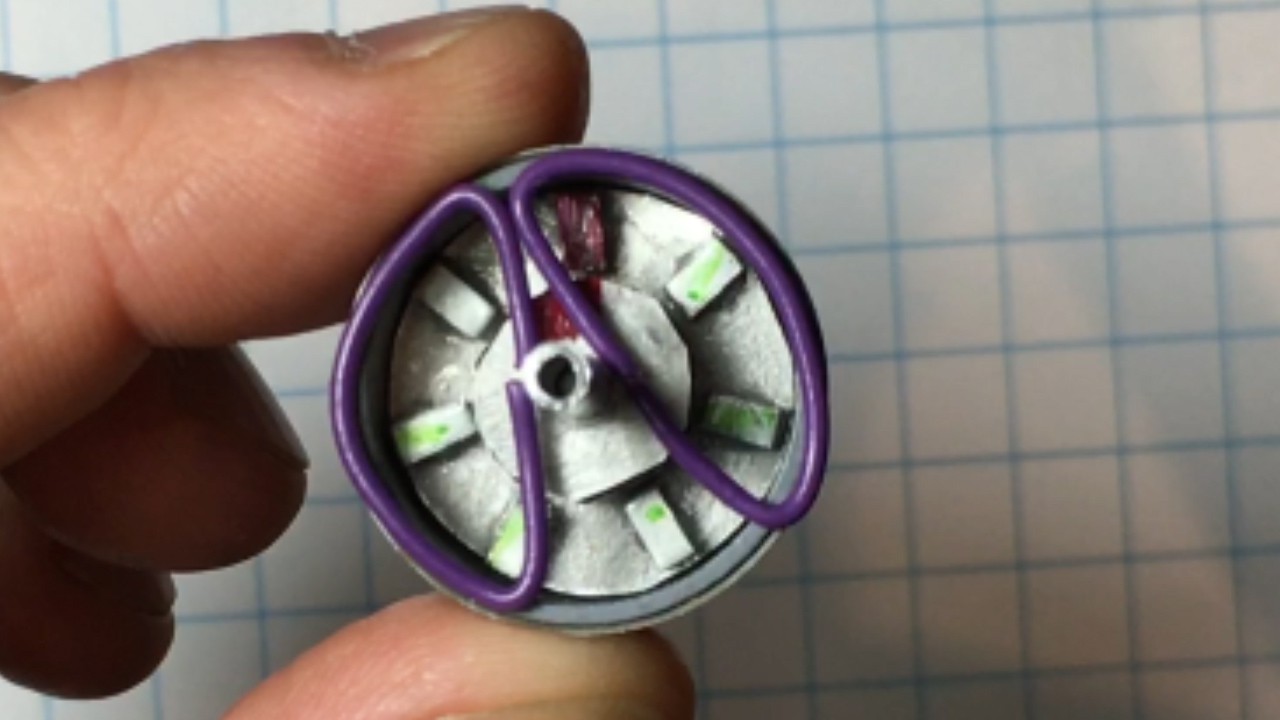
3D Printed Robot Actuator
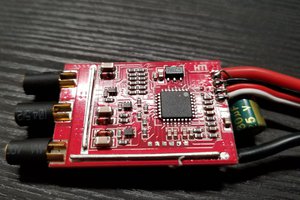
A high speed and high torque robotic actuator using low-cost brushless motors, custom controller, 3D printed parts and bearings.
 Paul Gould
Paul GouldBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests














 Anthrobotics
Anthrobotics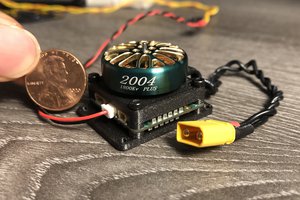
 Christopher Xu
Christopher Xu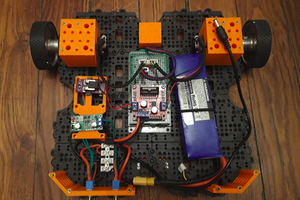
 matop
matop
Hi Paul, I sent a note to the application. i need to have some targeted iimprovement on this design for prosthetic elbow design. i am a father a child who needs one, i need to work or get some work done on this specific design idea.. thank you