 Mime Industries
Mime Industries-
21Step 21
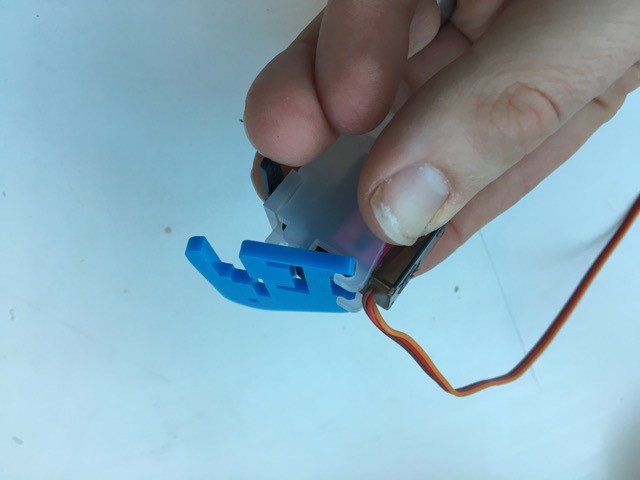
Slot both sides on o the grip, pushing the top into the slots like shown:
![]()
and then slotting them in so they are flat against the side:
![]()
![]()
-
22Step 22
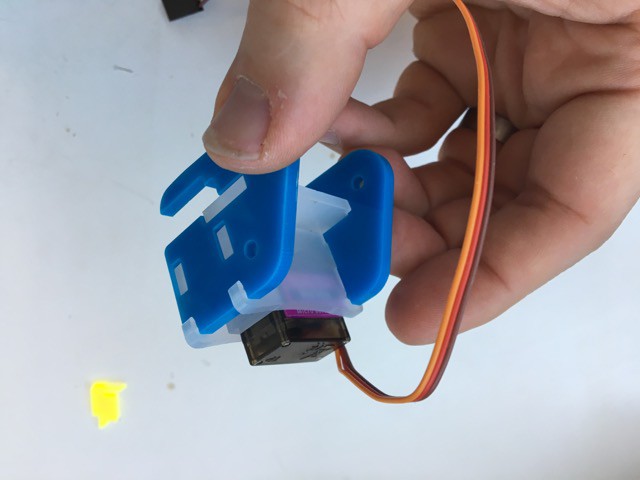
Now slot the grip on to the servo and hold the second one loosely in place:
![]()
-
23Step 23
And finally slide the base in to place which will hold everything together and put a 10mm screw through the second grip
![]()
The put an elastic band around it as shown to keep it all tight:
![]()
The grip is now complete so we'll join the three parts we've made together
-
24Step 24
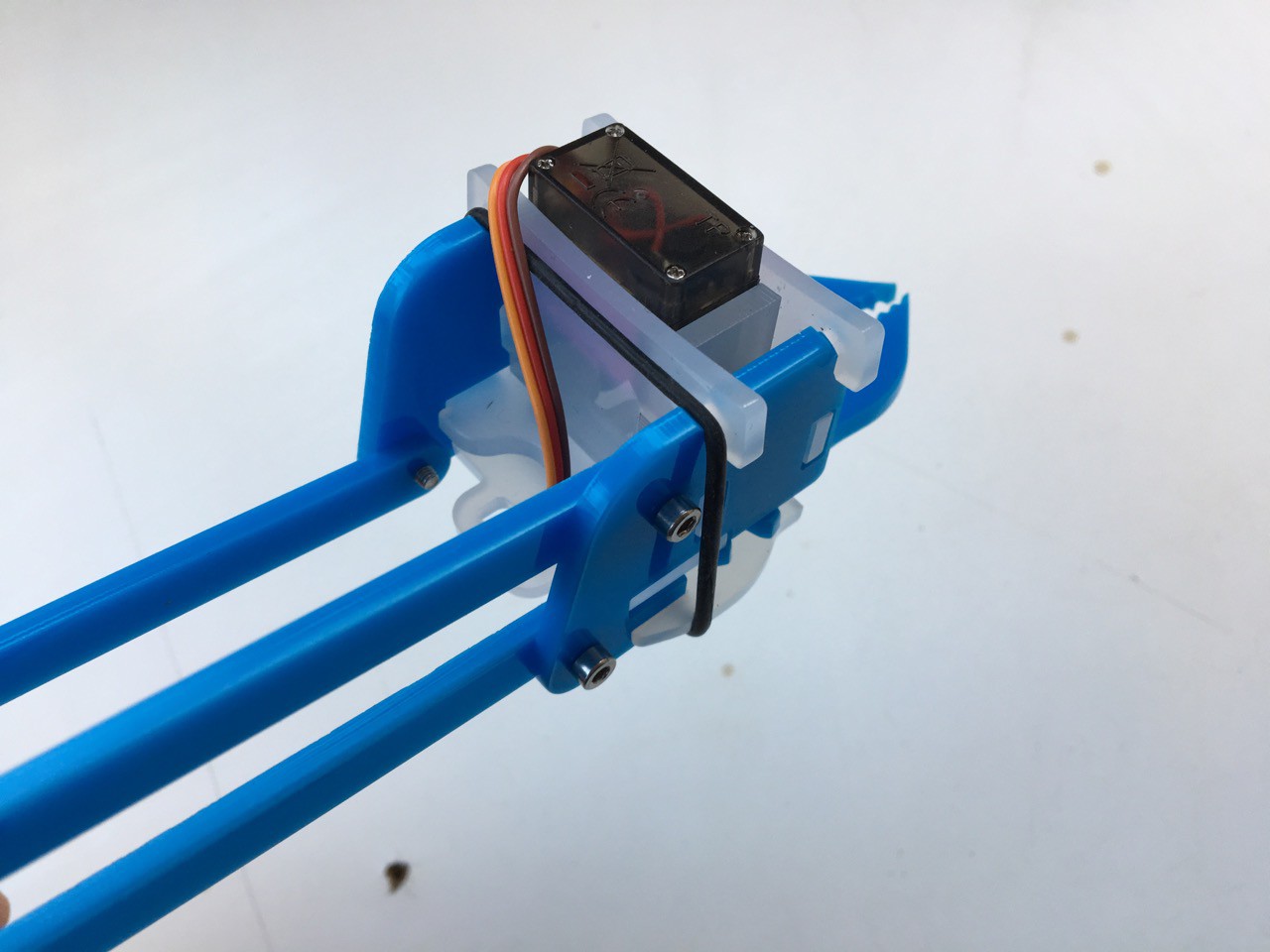
Attach the grip to the main arm as shown:
![]()
-
25Step 25
And then slot the servo horn on the base between the two sheets of perspex
![]()
and make sure the servo horn locks into place:
![]()
And then hook an elastic band over the end to hold it in place and act as a foot
![]()
-
26Step 26
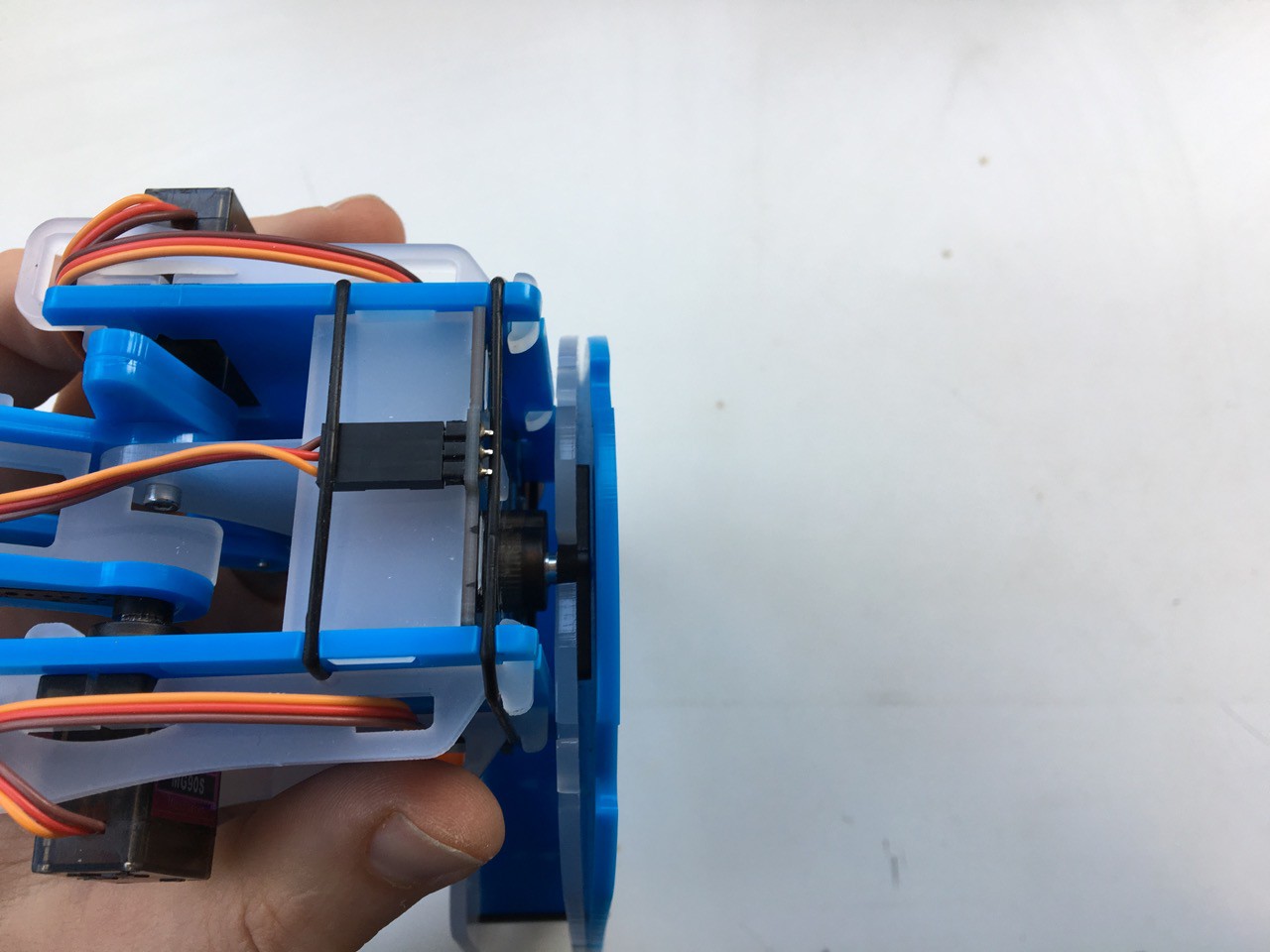
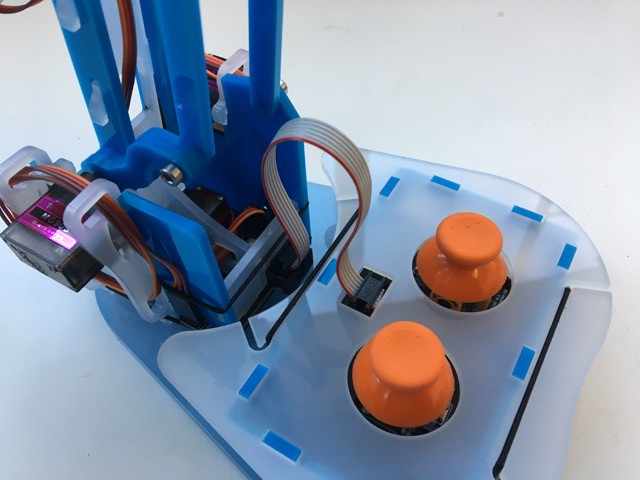
Plug the base in to the arm with a 6 pin cable:
![]()
-
27Step 27
That's the physical part of the assembly done! Not too shabby!
![]()
-
28Step 28
To get the whole thing working you need to install Node.js and get the software which runs it all. Here are the steps:
1. Install Raspbian
2. Install Node.jsRun the following commands from the terminal on your Raspberry Pi
sudo apt-get remove nodered nodejs nodejs-legacy npm -y sudo curl -sL https://deb.nodesource.com/setup_7.x | sudo bash - sudo apt-get install -y nodejsThen when you type "node -v" it should print out the version you installed
3. Install pigpio
wget abyz.co.uk/rpi/pigpio/pigpio.zip unzip pigpio.zip cd PIGPIO make sudo make install cd ..4. Install git
sudo apt-get install -y git5. Install the Mearm program
- Clone the mearm-js repository
git clone https://github.com/mimeindustries/mearm-js
- cd into the repository
cd mearm-js
- Install libraries and run the program
npm install sudo node server.js
The arm should spring into life and the Joysticks should control it
-
29Step 29
And here's the arm I just built working:
MeArm Raspberry Pi Edition
A robot arm kit that works with the Raspberry Pi







Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.