Follow these instructions to set up the raspberry pi to be able to receive files from the app. Almost the entire list of instructions below is thanks to a tutorial on YouTube referenced at https://www.youtube.com/watch?v=DmtJBc229Rg
One major issue came from the git repository link, which I have fixed below.
Install Necessary Software on the PI:
sudo apt-get install python-dev libbluetooth-dev
Edit Bluetooth service to flag
sudo nano /lib/system/system/bluetooth.service
About the 7th line down is:
ExecStar=/usr/lib/bluetooth/blluetoothd
add a -C to the end of that line to look like
ExecStart=/usr/lib/bluetooth/blluetoothd -C
Save, exit and reboot.
Run the script to turn Bluetooth on from the command line
bash home/patch/bin/bluetoothOn.sh
get pip
cd /home/patch/
wget https://bootstrap.pypa.io/get-pip.py
sudo python get-pip.py
git clone https://github.com/karulis/pytbluez
cd pybluez/
sudo python setup.py install
The Preamplifier Subsystem is, in practice, actually a buffer circuit. It was originally designed to boost the incoming electric guitar signal to line level, but it was found that the WM8731 Audio Codec had a sufficiently high-quality preamplifier built in. Thus, all that was needed was a buffer circuit, to mitigate impedance differences between the Audio Codec input and the electric guitar pickups. A buffer circuit does not amplify a signal, but it prevents the input signal from being overloaded by isolating it from the output (the load). This is accomplished using an OPAMP with unity gain.
Schematic Diagram
Below is a schematic diagram for the preamp/buffer circuit being used. It was designed by team member Ryan Knepel, and serves as a buffer between the electric guitar output and the guitar pedal input.
In the schematic above, take note of the following components and their purposes:
R1 and C1 are for noise.
C2 is a decoupling capacitor.
R2 is intended to prevent pops from switching the circuit on.
D1 is to protect against reversed polarity.
C6 is for power supply filtering.
C7 is to ensure an AC output.
R6 and R7 provide the power supply voltage divider.
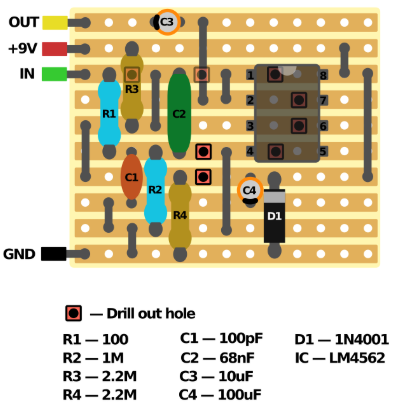
Implementation
The physical implementation of the preamp circuit was built using perforated PCB material and through hole components. A strip-board layout image may be found below:
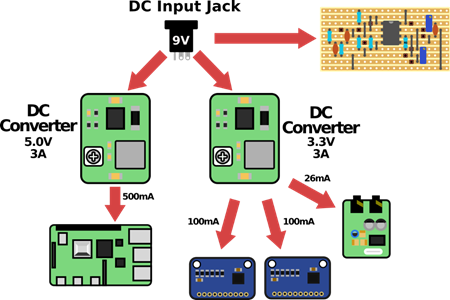
The Power Supply Subsystem, assigned to team member Katarina Ochoa, provides power to all the hardware components in the Pedal. It consists of two buck-boost regulator modules: one for 3.3V output and one for 5V output. Both are rated for a maximum current load of 3 Amps, and they take their unregulated input voltage from a 9 to 12V DC wall adapter.
Block Diagram
The following block diagram shows how the Power Supply Subsystem distributes power to each of the main hardware components. From left to right, the Raspberry Pi is powered from the 5V regulator, and the ADC boards and Audio Codec take their power from the 3.3V adapter. The Preamp Circuit takes power directly from the DC jack for maximum audio headroom. The current draw values listed on this diagram are estimates from initial testing- be cautious and verify these values for yourself, because newer Raspberry Pi models usually draw more current
Component Selection
The power supply modules themselves were purchased instead of designed to save time and cost. They are generic buck-boost modules from an online retailer, although any low noise, high efficiency regulator circuit would work. The 3.3V module may be found here: Amazon
Issues Encountered
The only issue that was encountered with these power supply modules was the fact that they introduced noise into the audio chain, due to their switching nature. This was mitigated by installing 470uF capacitors across the output lines of each module to smooth out the DC waveform and suppress any emissions. See the section on Building a Hardware Prototype for more information, and a schematic diagram, as this issue was dealt with during that stage of the project.
After the individual subsystems were tested and validated, the next step was to construct a full-system prototype. This was the first step of the project (officially known as the system integration) that had to be completed off-campus due to the worldwide pandemic. Therefore, some modifications had to be made, and some tests could not be run in a formal lab environment.
Procedure
First, a cardboard mock-up of the Hammond 1590DD enclosure we wished to use was constructed. It matched the dimensions of the actual metal enclosure (which was not yet on hand), according to dimension drawings provided on Hammond's website.
Next, using the cardboard prototype as a guide, a piece of perforated circuit board was cut down to a size that would fit in the enclosure. The ADC boards, the power supply modules, and the audio codec were laid out in a manner that minimized space consumption. Specifically, the ADC boards are located underneath the audio codec. This is not especially advised because i2c noise could leak into the audio, but this was not a problem we encountered. On issue that was encountered was having power supply noise on the audio. This was remedied by placing 470uF electrolytic capacitors across the regulated voltage outputs. In retrospect, linear regulators could've been used in place of buck-boost regulators to fully eliminate this noise issue, but at the cost of power efficiency.
A 20 pin (0.1" pitch) header was used to connect the four knobs, expression pedal input, audio input and output jacks, LED and bluetooth pairing button to the board. For a very detailed layout of this pin header and the hardware PCB, please view the Hardware PCB Schematic Diagram PDF file, which is taken from Ben Jacobs' engineering notebook.
A 40-pin IDE ribbon connector is used to connect the hardware board to the Raspberry Pi, providing the necessary i2c, SPI and GPIO connections between the two.
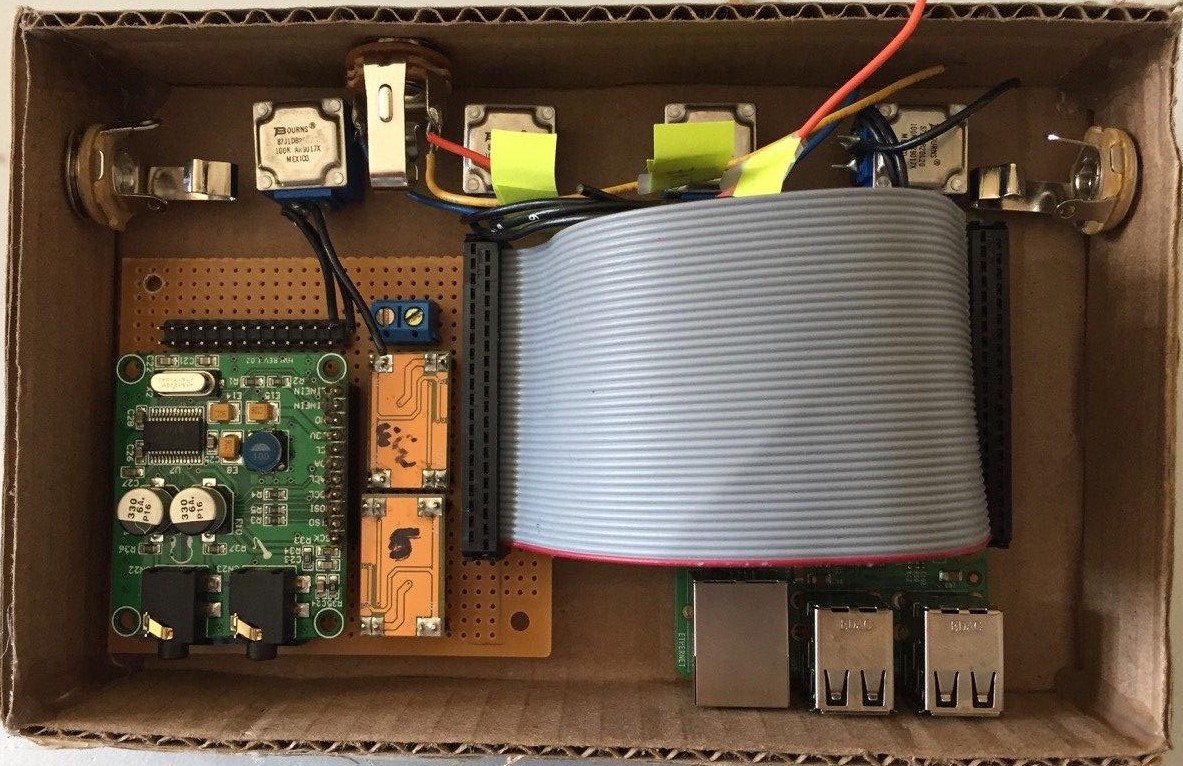
Result (Preliminary Prototype)
The finished prototype in the cardboard enclosure is shown below, minus the necessary wiring harness going between the jacks, knobs and pin header. Notice that the Raspberry Pi is a tight fit. In retrospect, it may have been better to use a larger enclosure size for some wiggle room.
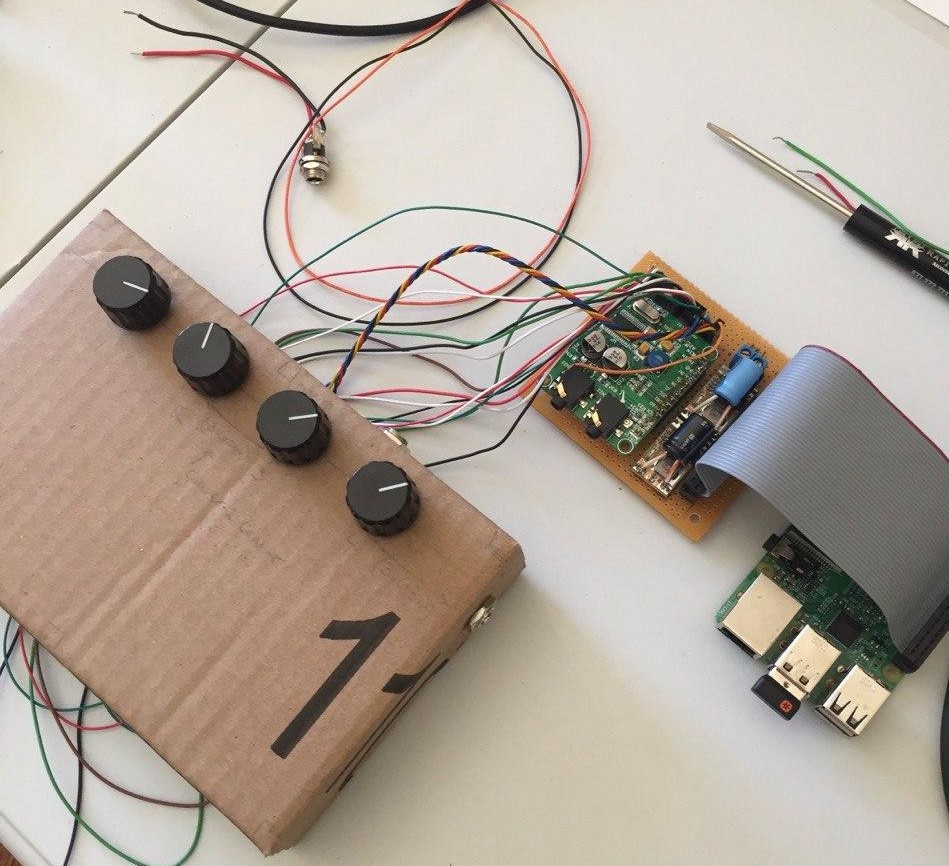
Another photo of the prototype is shown below, this time from a top view, with the internals wired into the knobs and jacks, but sitting externally on the table for testing purposes. Notice that the stomp switch has not yet been implemented, because this prototype would not support physically being stomped. In the metal version, the stomp switch will fit in the gap between the PCB and the Raspberry Pi.
Video (Preliminary Prototype Test)
Below is an informal test of the preliminary hardware prototype. This video serves as proof that the system is working, and a more complete demonstration video may be uploaded when the pedal is in a more polished state.
Upgrade to Aluminum Enclosure
Once the functionality of the cardboard prototype was confirmed, it was mailed to team member Ryan Knepel, who was in charge of the final integration into a metal enclosure. He is also scheduled to integrate the stomp switch, LED, and preamplifier circuit.
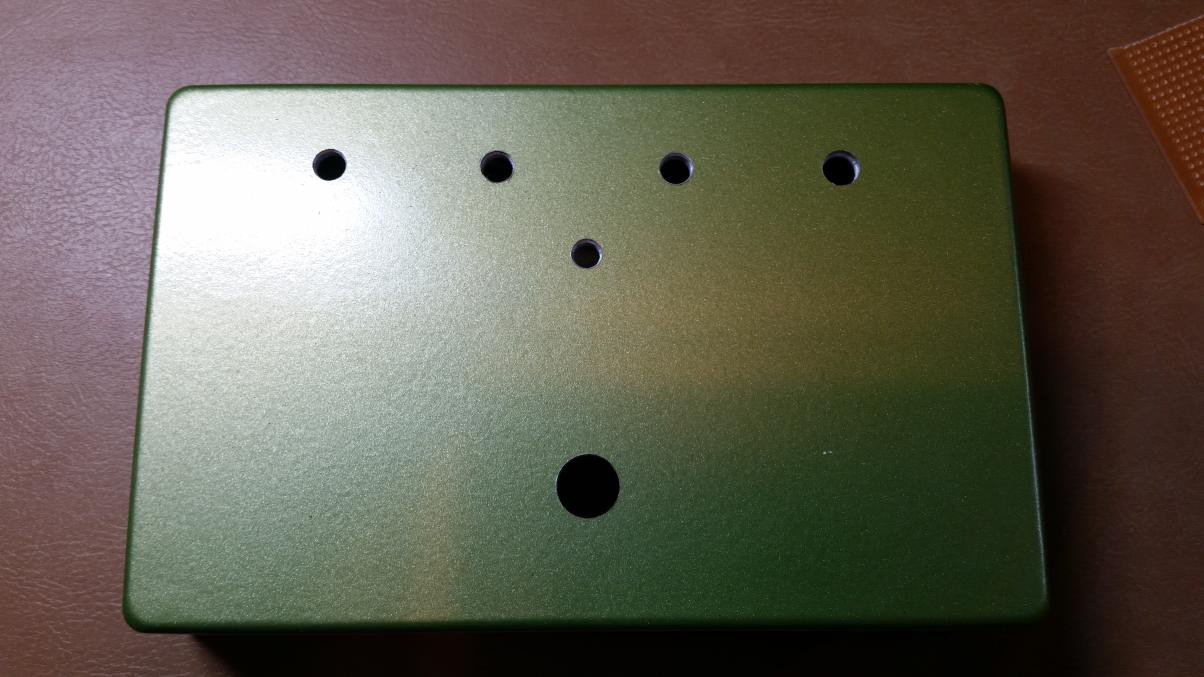
Below is a photo of the aluminum enclosure, which has been painted (a green color was not our first choice, but it sufficed because of limited access to hardware stores at the time) and drilled.
Below is another image of the aluminum enclosure, now with the various jacks, knobs other hardware elements mounted in the holes. This photo gives a good idea of how the final product will look (much more professional than the cardboard prototype!).
In order for the pedal system to function with no human-interaction after booting the Raspberry Pi, some actions need to be automated with scripts. Namely:
PureData must be loaded at boot with the effect file to be opened as a runtime parameter
A command should be run that enables Bluetooth on the Raspberry Pi (App Subsystem)
The Human Interface Python script that handles the ADCs should be loaded at boot
Running Scripts with Crontab
To accomplish this list of tasks with automation, bash scripts were employed, in conjunction with a Linux tool called Crontab. Crontab allows editing a system file (also called crontab) which allows user entry in a specific format, which is then decoded by the OS into instructions for it to run certain terminal commands at certain times of day, or in our case, when certain events occur, like shutdown or boot. You can familiarize yourself with Crontab here: Ubuntu Cron How-To.
Below are the three entries in our team's Crontab file. The first line runs PureData and the second line runs the Human Interface Python script. Note the '@reboot' statement preceding every command. This says "run this line when the OS boots". Also notice the '&' character after every line. This says "do not wait for a return from this command, move on to the next one without hanging the terminal".
If you are duplicating this project for your own use, make sure to include the proper name and paths to these files- your file-paths or script names could be different.
In the code above, the first line tells the OS that this is a Bash Script. The second line is a call to alsamixer (the ALSA sound level and mixing tool). The option '-c 0' stands for "Use card #0", which should be the WM8731 Codec from the Audio Subsystem.
The option "cset numid=4 on" causes ALSA to enable control number 4 on card 0. In our case, this vaguely named control maps to the "Line Input Mux". This is a feature of the WM8731 card which allows a user to choose whether audio input comes from the microphone input, or the line level input. For our purposes, we want the line input, so we set this mux control to 'on'.
Finally, the third line opens PureData. Notice that it is prefaced with "sudo" to run as the root user. The '-rt' option stands for "real time audio", the '-nogui' option tells PureData to run without a graphical interface (you may wish to omit this option if you're still debugging using the desktop environment so that you can actually see the PureData window come up). Lastly, the file path to the effect that should be run is provided.
This script doesn't need to be run through crontab, either. It can be called manually from the terminal during a normal desktop session for debug purposes, too. In fact, it is encouraged to always launch PureData from this script, because the 'amixer' command preceding it ensures that the system audio is set up properly (avoids bugs).
Script Spotlight: knob_send_vX_X.py
This is the Python script which handles the human interface, and links the physical knobs to the PureData DSP engine. This script is examined in detail under the Project Log for the Human Interface Subsystem.
The Human Interface Subsystem, assigned to team member Ben Jacobs, allows for input from various analog hardware controls. These inputs are routed to the PureData DSP engine through a Python script to change effect parameters 'on the fly'. Our hardware prototype has four hardware knobs, and one expression pedal input. This could be expanded by three inputs with the existing ADC hardware, for up to 8 total analog inputs.
The subsystem is comprised of two ADS1015 Analog Digital Converter boards, which communicate with the Raspberry Pi over the same i2c bus as the Audio Codec. As mentioned above, a Python script handles this communication, value averaging and thresholding, and the routing of the digital values to PureData. The potentiometers that are used for the four knobs in our hardware prototype are 30k Ohms linear taper, but depending on your preference, any sufficiently high value would work (10k - 100k). Remember that the lower the resistance value, the more wasted power there will be due to increased current.
Subsystem Bill of Materials
2x ADS 1015 ADC boards (Adafruit)
4x 30k Ohm Linear Potentiometers
1x Stereo 1/4" Jack (Exp. Pedal Inp.)
Jumper Wires
Medium breadboard
Subsystem Hardware Connections
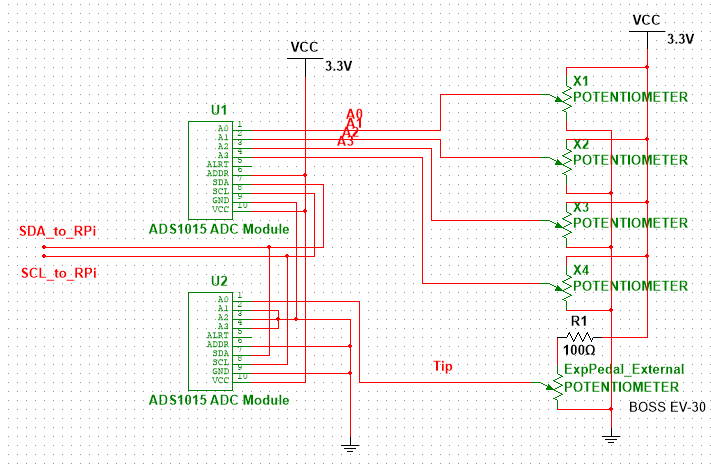
Below is a block diagram showing the connections to the Raspberry Pi. Notice that these connections are made over the same i2c bus as the Audio Codec uses. Both devices on the bus will have different addresses. Also notice that there are three free channels on the second ADS 1015 device (channels 6 through 8) that could theoretically be used for more human interface device inputs with minor software modifications. Make note of the 100 Ohm current limiting resistor on the expression pedal VCC connection. This is to reduce current inrush when the pedal is plugged in.
Subsystem Software
To accompany the hardware for this subsystem, there are two main software pieces to complete the path from the hardware knobs to the PureData DSP engine. These come in the form of a Python script called KnobSend, and a PureData object called Knobs. These files will be available for download under the files section of this site.
The Python Script
The purpose of the Python script is to read the ADC devices over the i2c bus and do some averaging and threshold math on the returned values so that they end up ranging between 0 and 1, which makes them useful for modifying PureData patch (effect) parameters.
The script makes use of the following Adafruit libraries, which must be installed on the Raspberry Pi. The following links have useful information on completing those installs.
The full code of the Python script can be found in the files section of this site, but a few key snippets will be examined here. The snippet below sets up the i2c connection for use in the rest of the script. Notice the i2c addresses are hard coded here in decimal (72 = 0x48, for example).
#Adafruit Library Code
i2c = busio.I2C(board.SCL, board.SDA)
import adafruit_ads1x15.ads1015 as ADS
from adafruit_ads1x15.analog_in import AnalogIn
#Define ADC object
ads1 = ADS.ADS1015(i2c, address=72) #The ADC with the knobs (0x48)
ads2 = ADS.ADS1015(i2c, address = 73) #The ADC with the expr. pedal (0x49)
This snippet sets some parameters for the rest of the script, called avgs (averages) and threshold. The averages parameter sets how many readings should be taken for every final value that is outputted. The readings are averaged to reduce parasitic noise in the readings. The default is 10.
The threshold parameter sets the minimum delta (change) between two values (post-averaging) that is necessary for the script to consider a knob to have been turned. This further reduces noise, and prevents the system from getting bogged down due to constantly sending new values, even if they aren't substantially different from the last value. The default is a minimum delta of 0.01 out of 1.
#Define variables
avgs = 10 #How many averages should be performed?#Set avgs to one to theoretically eliminate this feature (untested)
threshold = 0.01 #What is the threshold for "knob moved?".# Set Threshold to zero to theoretically eliminate this feature (untested)
The code snippet below is a mask to set which ADC channels are read from by the script. By placing a '1' in a slot, the channel will be read. If you place a '0' in a slot, the channel will be ignored. This is where you could theoretically expand the number of knobs on your pedal, by adding '1's to the previously unused ADC channels.
# ===ADC 1=== ===ADC 2====# 0 1 2 3 0 1 2 3
mask = [1, 1, 1, 1, 1, 0, 0, 0] #Set mask for active channels on ADCs
# 1 -> Channel = ADC Reading, 0 -> Channel = 0 (disabled)#Default Mask is 1 1 1 1 1 0 0 0 for 4 knobs and one expression pedal
The script communicates with PureData using the following code snippet. The code 'packs' the ADC value into a string of the format 'kX 1.11;', where X is the zero indexed channel number ranging from 0 to 7, and 1.11 is the numeric value from that channel. Messages are terminated with a semicolon. This string is sent over a local UDP connection on port 13000 to PureData using the UNIX command 'pdsend'. We will see how PureData receives this message in the next section.
#If knob moved more than threshold, send values to Pure Data with 'pdsend' #Note format string %.2f. This gives two sigfigs of resolution.msg = "k" + str(i) + " " + str('%.2f'%(k_avg[i]/3.3)) + ";"
os.system("echo '" + msg + "' | pdsend 13000 localhost udp")
The PureData Objects
To receive the messages with ADC values from the Python script, we must create a specialized PureData object. In fact, we created two versions, which we called knobs.pd and knobs_smooth.pd. Both are available in the files section of this site.
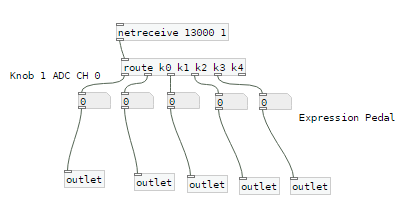
A screenshot of knobs.pd, the "base" version of the receiver object, is shown below. The 'netreceive' object at the top interfaces over UDP port 1300 to the Python script. It pipes what it receives into the 'route' object, which sorts the incoming messages based on the header 'kX' that we saw above. The values from the body of the message then show up in the number boxes, and they are piped into outlets at the end. By placing knobs.pd into your own PureData effect as an abstraction, you can access these outputs to modify your effect parameters.
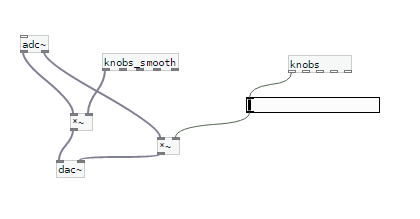
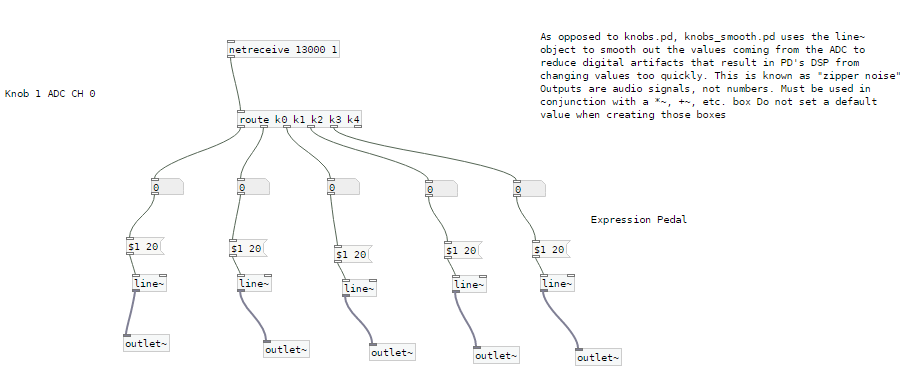
A screenshot of knobs_smooth.pd is shown below. This version differs from knobs.pd in that its outputs are "audio" signals rather than numbers, which is done through the line~ object. This fixes a known issue in PureData when you try to modify a gain control "on the fly" (eg while DSP is running) in which an unwanted "zipper" noise is heard on the output. The knobs.pd we see above can be used to modify any control that accepts a number, while knobs_smooth.pd may only be used with controls that accept an audio signal. As an example, here is a PureData patch set up with both versions of the knobs object (in reality you cannot use both at the same time, unfortunately). In this setup, knobs.pd (in the right audio channel) would cause zipper noises, but knobs_smooth.pd (in the left audio channel) would not. However, notice that only knobs.pd can attach its outputs to non-audio inputs, such as the horizontal slider shown here.
Video
Below is a short, informal demonstration video of the Human Interface Subsystem when it was a breadboard prototype. Notice that, with the adjustment of a potentiometer, a horizontal slider connected to a Knobs object (above) moves accordingly.
This subsystem contains contributions from team members Chad, Katarina, Ryan and Ben J.
The Raspberry Pi 3B+, for all it's excellent features, does not have a built in audio input. To remedy this and get the analog guitar audio into the RPi for processing, as well as to provide a HiFi audio output, an audio codec device was used. An audio codec is a device that interfaces digitally with a processor to provide analog audio capabilities. The main components that go into a codec are an ADC, a DAC, and some sort of filtering. The codec that was used in this project in specific was the Wolfson 8731, which is available on a dev-board for convenience.
The Wolfson 8731 operates on the i2C interface (for low speed, general purpose communications, eg. setting volume) and the SPI/I2S interface (for audio data transfer). Using open source drivers, the WM8731 appears to the Raspberry Pi's Linux operating system as a normal sound card in the ALSA sound manager tool (alsamixer).
This project assumes you are using the PatchBoxOS on your Raspberry Pi. PatchBox is an OS that supports Real-Time audio, and is rather lightweight, compared to Raspbian or other common OSes for the Pi. If you use another debian-based OS, be prepared to possibly encounter audio latency issues.
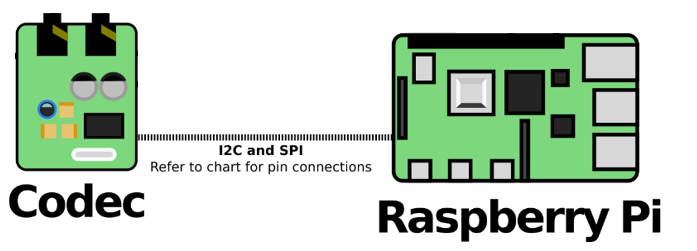
With the OS installed on the Raspberry Pi, you may begin making hardware connections for the Audio Codec Subsystem. Below is a block diagram of the codec subsystem. Notice the connections to the RPi over I2C and SPI interfaces.
Below is a table showing the connections between the Raspberry Pi and the WM8731 Codec board. For the puprose of this site, this information was taken directly from the following webpage: https://www.fredrikolofsson.com/f0blog/?q=node/656
proto raspberry
----- -----
sck rpi 12
miso rpi 38
mosi rpi 40
adcl+dacl rpi 35//both proto pins go to the same rpi pin
sda rpi 3
scl rpi 53.3v rpi 1
gnd rpi 6
It is important to note that for the time being, the codec may be powered by the 3.3V pin on the Raspberry Pi, but in the final prototype, the codec and the Raspberry Pi are being powered by the Power Supply Subsystem (details provided in that section).
Subsystem Software Configurations
Before the WM8731 codec will be recognized by the Linux operating system on the Raspberry Pi, some software configuration was necessary. Although the same page used for the hardware connections reference (the blog of Fredrik Olofsson) contains software setup instructions, it was found that issues with audio dropouts and general instability were remedied by following the Github page for the TerminalTedium project, which also uses the WM8731 in conjunction with a Raspberry Pi:https://github.com/mxmxmx/terminal_tedium/wiki/setting-up-linux
The difference between these two sites is in which kernel module is being loaded to handle communication with the codec. The TerminalTedium page recommends loading the rpi-proto module, which was found to work best, as it appears to be a module built into Linux which was made specifically to be compatible with the WM8731.
Kernel modules are loaded at boot on the Raspberry Pi by modifying the config.txt file, located in the /boot/ directory. The following code snippet shows the modification necessary to this file in order to load the necessary module.
Upon a reboot of the Raspberry Pi, the new audio interface should be visible by running the command alsamixer at a terminal window. The device should be listed as "rpi-proto".
Configuring PureData
As a preamble to this section, a helpful resource for learning about PureData in general may be found here: http://write.flossmanuals.net/pure-data/introduction2/. It is recommended that you familiarize yourself with the PureData interface before proceeding. PureData is similar to MAX/MSP in that it's a visual DSP programming language.
The operating system on the Raspberry Pi, PatchBoxOS, comes pre-loaded with a recent version of the PureData DSP engine. Minimal configuration is necessary to set it up to be used with the WM8731 codec, which is now visible to the Linux kernel as an audio device.
The following settings are recommended. This may be done manually, or the code below may be pasted into a .pdconfiguration file and loaded into PureData.
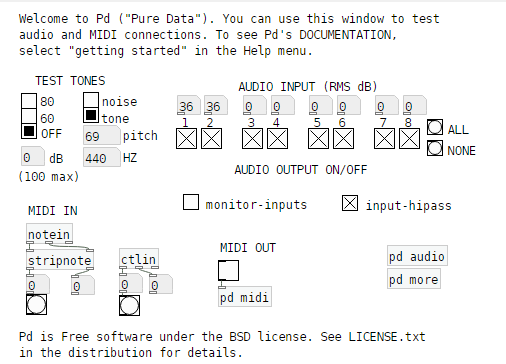
Once PureData is configured, open the built-in 'Test Audio and MIDI' patch. This may be found under the Audio menu. Below is a screenshot of this test interface.
Attach a set of headphones and a signal source to the line-in input of the codec. Start by playing a test tone by clicking the '60' setting under 'TEST TONES'. You should hear a 440Hz tone in the headphones. Turn off the test tone, and check the 'monitor-inputs' box to pass the line-input through to the headphones. If either or both of these tests do not work, you may need to restart PureData.
 Ben Jacobs
Ben Jacobs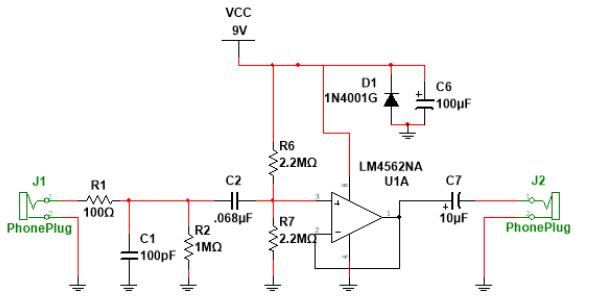

 As an example, here is a PureData patch set up with both versions of the knobs object (in reality you cannot use both at the same time, unfortunately). In this setup, knobs.pd (in the right audio channel) would cause zipper noises, but knobs_smooth.pd (in the left audio channel) would not. However, notice that only knobs.pd can attach its outputs to non-audio inputs, such as the horizontal slider shown here.
As an example, here is a PureData patch set up with both versions of the knobs object (in reality you cannot use both at the same time, unfortunately). In this setup, knobs.pd (in the right audio channel) would cause zipper noises, but knobs_smooth.pd (in the left audio channel) would not. However, notice that only knobs.pd can attach its outputs to non-audio inputs, such as the horizontal slider shown here.