 Alex M Sunny
Alex M SunnyGOAL :
Our aim is to provide better rehabilitation and assistive technology solution for people who are facing lower limb mobility issues.
Pain Statement trying to solve
Potential users of our product are people with walking disabilities The device would help gain independence from caretakers in doing simple daily activities of life while several secondary problems arising from wheelchair use could be solved.
Our device addresses the lack of assistive devices and rehabilitation devices for people with lower limb disability. A major problem these patients suffer is their dependency on a caretaker for basic tasks such as toiletries and fetching water or food for themselves. Our product has been specifically designed to tackle these daily struggles within a work-space or home-space.
Treatment cost
It is reported that the average lifetime cost per person with Cerebral Palsy is estimated around $1.5 million i.e. around $800,000 for indirect medical costs, $100,000 for direct medical costs and around $100,000 for direct non-medical costs, according to Morbidity and Mortality Weekly Report. It should be noted that while some people may be able to afford the treatment costs for a lifetime, many people couldn’t even afford the initial treatment costs.
Details
There are two parts in this project: 1 ) walker and 2) Exosuit system.
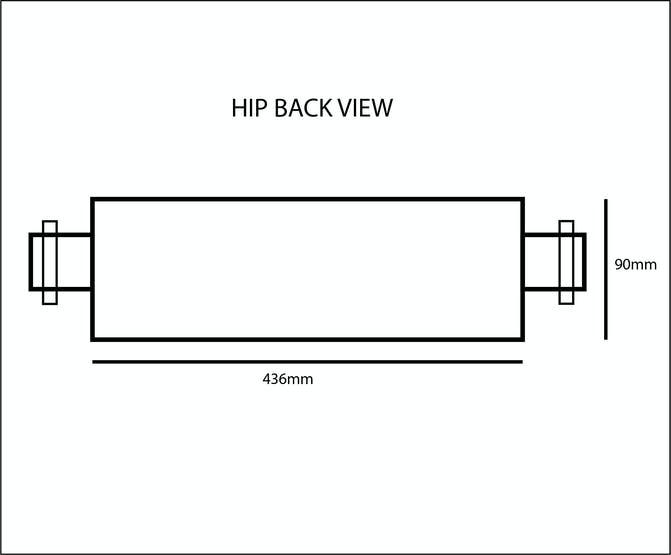
First, the walker has to be switched on and then the O-LED screen in the walker shows the menu to sit, stand, walk. The buttons can be used to select between different menus and joystick in the walker can be used to send signals for walking to Exosuit system. The entire system is communicated with paired Bluetooth.
You can refer to this block diagram:

Part 1
Walker Unit
The Walker unit in this project uses an o-led screen for display, There are four buttons one for switching on the entire system other three are for selection of menu like walking, standing and sitting. Also there is an joystick connected to move forward and stop.
Also there is a Arduino Nano and a Bluetooth module to send signal to Exosuit system.
Connecting OLED with Arduino
Oled screen can be connected and we can display images. The Bmp file can be converted into Hex file and can be used in our code. You can refer this tutorial for understanding more about conversion of bmp file.
Images

Walker
Connection

Connect the components as shown in the schematic diagram
Arduino Nano OLED
GND ---------------------- GND
5V ---------------------- 5V
A5 ---------------------- SCL
A4 ---------------------- SDA
Arduino Nano HC-05( Bluetooth)
GND ---------------------- GND
5V ---------------------- 5V
Rx ---------------------- Tx
Tx ---------------------- Rx
Arduino Nano Joystick module
GND ---------------------- GND
5V ---------------------- 5V
A1 ---------------------- X pin
Arduino Nano Button
Pin2 ---------------------- Button 1
Pin 3 ---------------------- Button 2
Pin 4 ---------------------- Button 3
Pin 5 ---------------------- Button 4
Working (Walker)
The walker was made by cutting the front portion of normal walker and adding wheels in the two front legs.Holes for were made using drill machine. Grips were also added.
The Walker unit in this project uses an oled screen for display, There are four buttons one for switching on the entire system other three are for selection of menu like walking, standing and sitting. Also there is an joystick connected to move forward and stop.
walker working video
Part 2
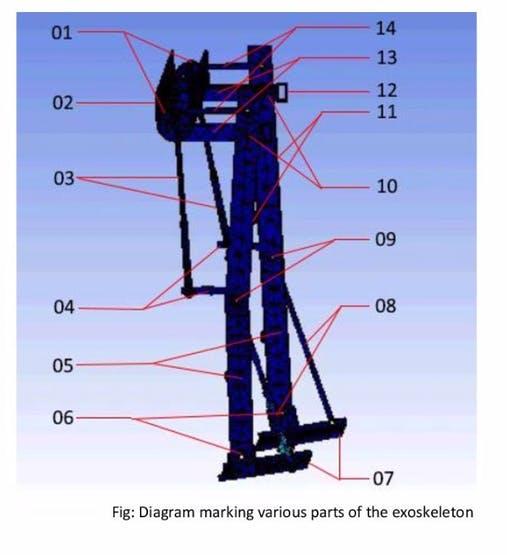
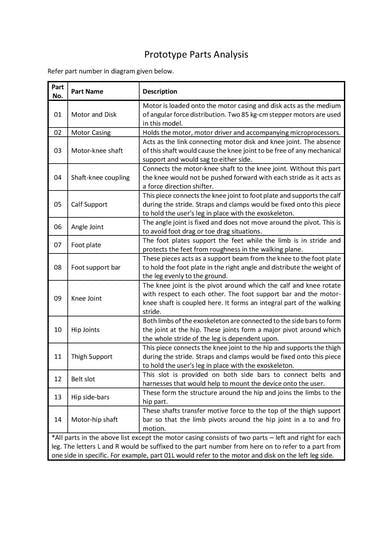
Exosuit System
Working
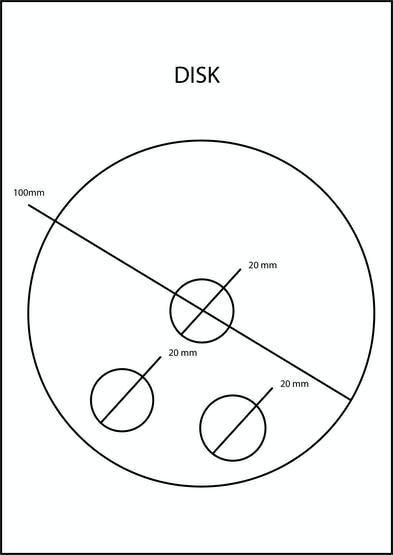
When data from the walker is provided to the exosuit the motors rotates and each motor is connected to one mechanical leg of exosuit. During one rotation the exosuit is designed to take one step.
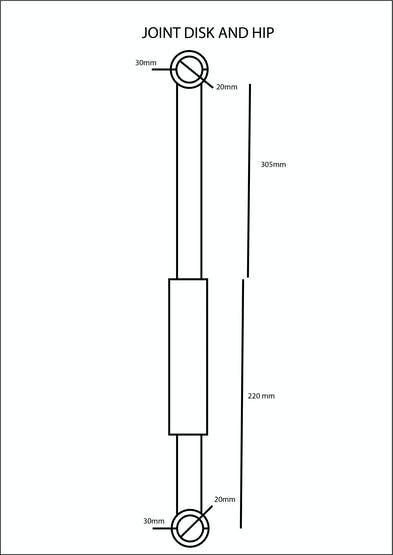
The mechanical legs can be attached to our legs with straps and belts

Exosuit system
Connection
Make the connection as shown in the schematic diagram
Arduino...
Read more »














 Julien Provenzano
Julien Provenzano
 Malte
Malte
 Julien OUDIN
Julien OUDIN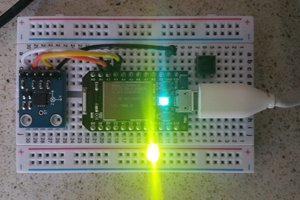
 _henry
_henry
Wow, Amazing can this be used as an assitive device too??