 glgorman
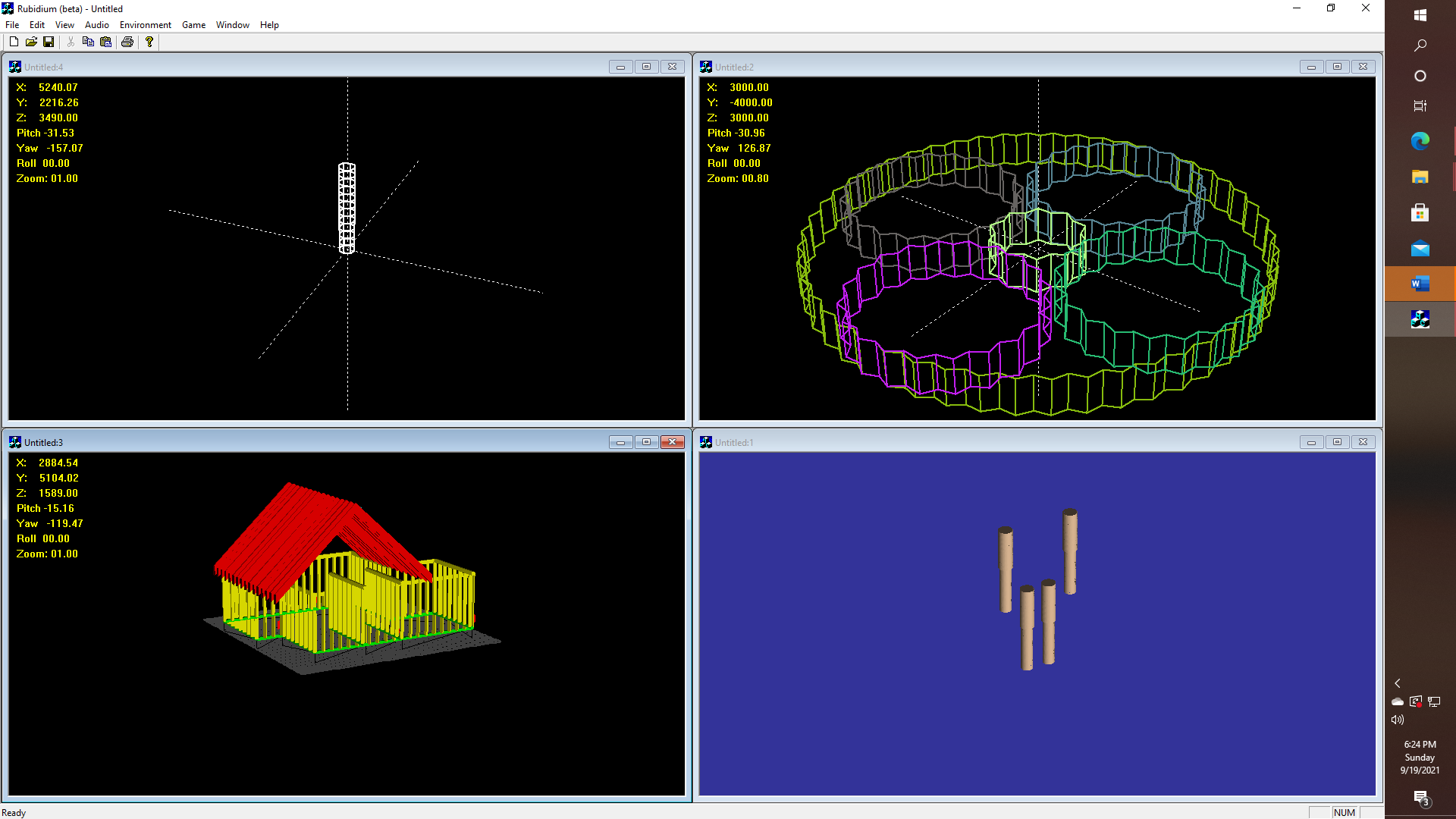
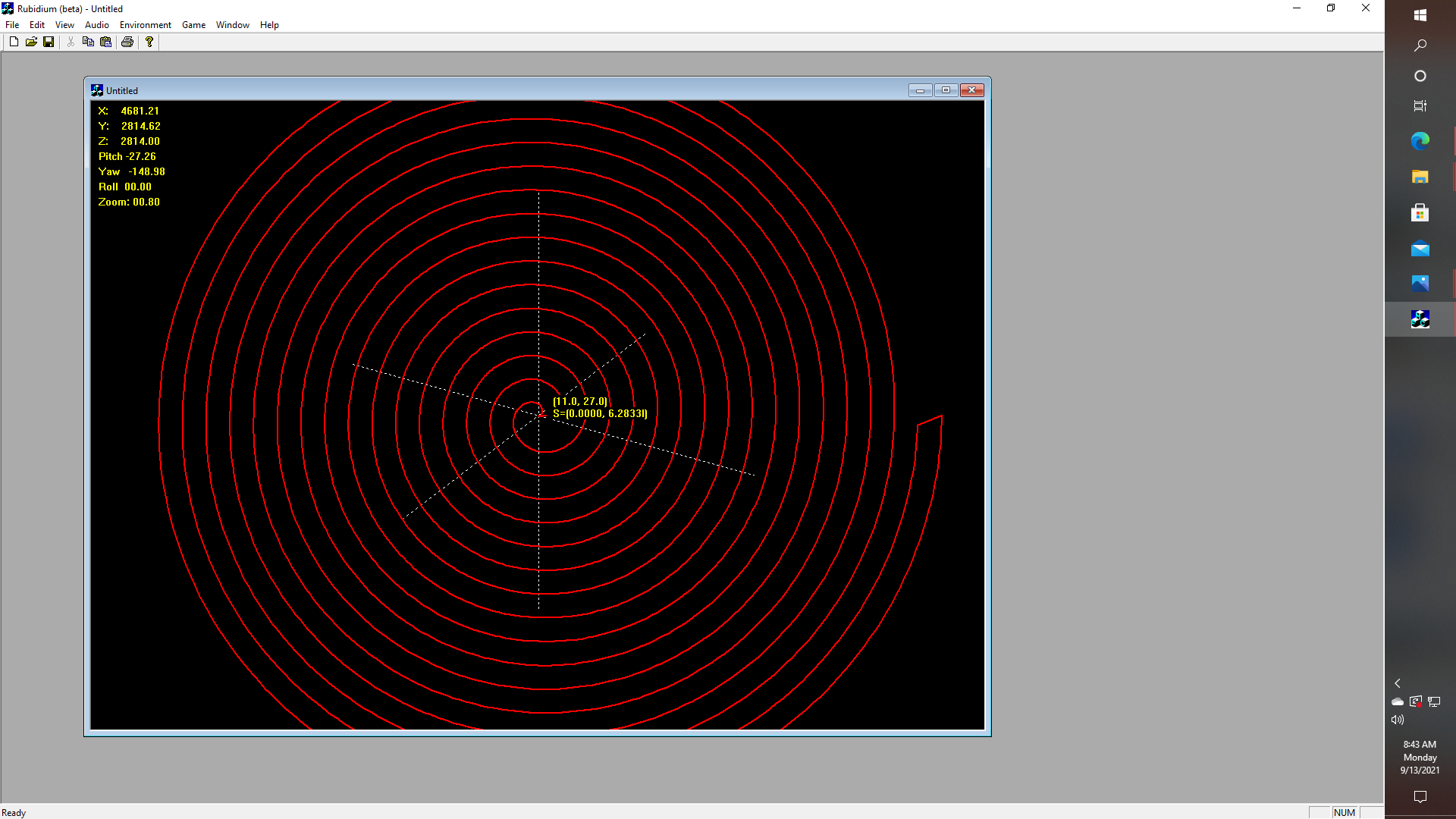
glgormanO.K., just getting started here. There is a project that I started on GitHub which you can find under the project name (there), where it is presently titled "rubidium", and as far as rubidium and my C++ port of the propeller debug terminal, that project is what it is; but as far as the motivator is, well that is where is THIS saga begins, or will begin shortly, after a brief message from the Propeller Debug Terminal C++ version release notes.
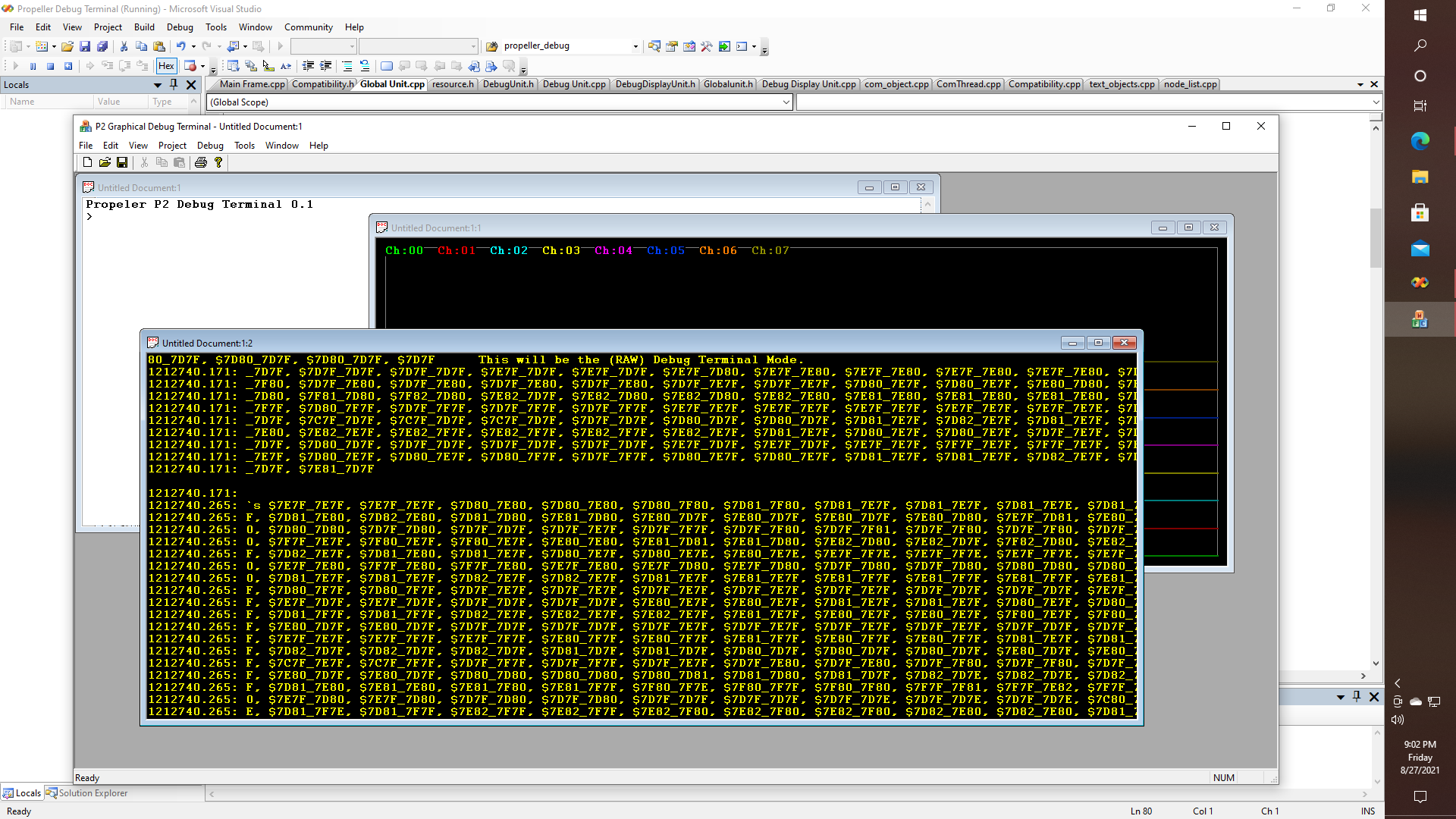
Notes for Propeller Debug Terminal.
This is a C++ port of the Delphi code originally posted by Chip Gracey to the Parallax forums. Many issues are addressed in this code base that I hope others will find useful in developing their own Parallax Propeller P1/P2, Arduino or other microcontroller-based projects. Serial port interfacing using the FTDI USB hardware conversion is well developed, so that part of the code base can be used as a part of a framework for other developers who trying to develop their own bespoke applications. Thus, if you have been getting that dreaded "port in use error by another application" with some other program written in Java for the Arduino (for example), and requiring you to reboot or die, then you will find reasonably correct COM port interfacing code example here which should help banish that issue -- for once and for all. Just in case you are trying to build a real application ... and not just run test cases in the manufacturer's sandbox.
Likewise, many people are going to want to go beyond the typical ANSI terminal mode, which is usually all that is available when remotely debugging or otherwise interfacing with experimental external hardware. Now you should be able to incorporate UNICODE based symbols for things like chess fonts, Astrological symbols, Emojis etc. Additionally, providing for improved accessibility for users who need special input device (not provided) for reasons of disabilities will also be possible. Of course, if you are already using, or have used an IME (Input method editor) with another application, then you should have no problem adapting the Code base for use with Arabic, Chinese, Greek, Japanese, Mayan, or any other context that requires UNICODE awareness.









O.K. Opening up this part of the project for comments, discussions, etc. Thoughts?