0%
0%
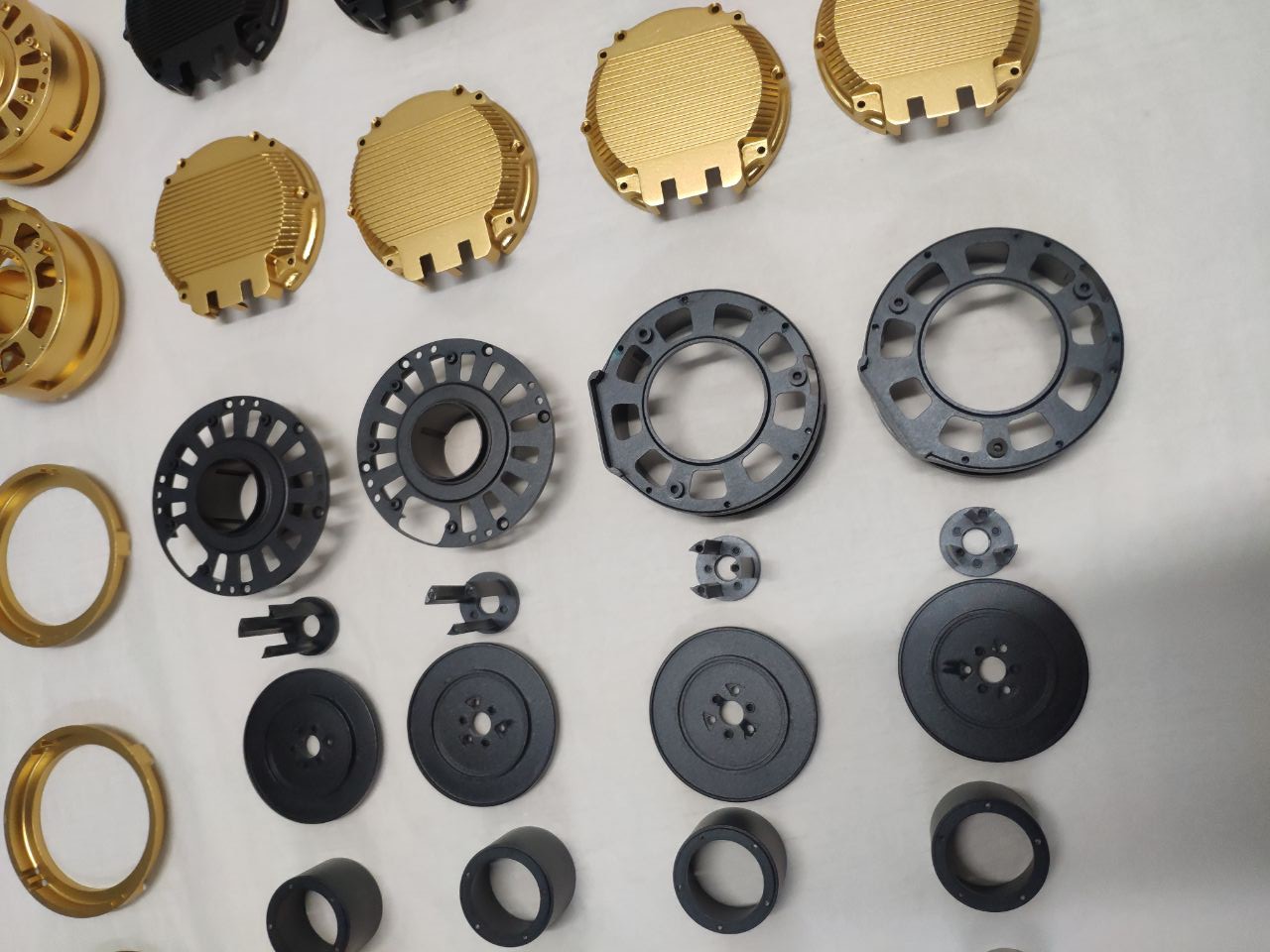
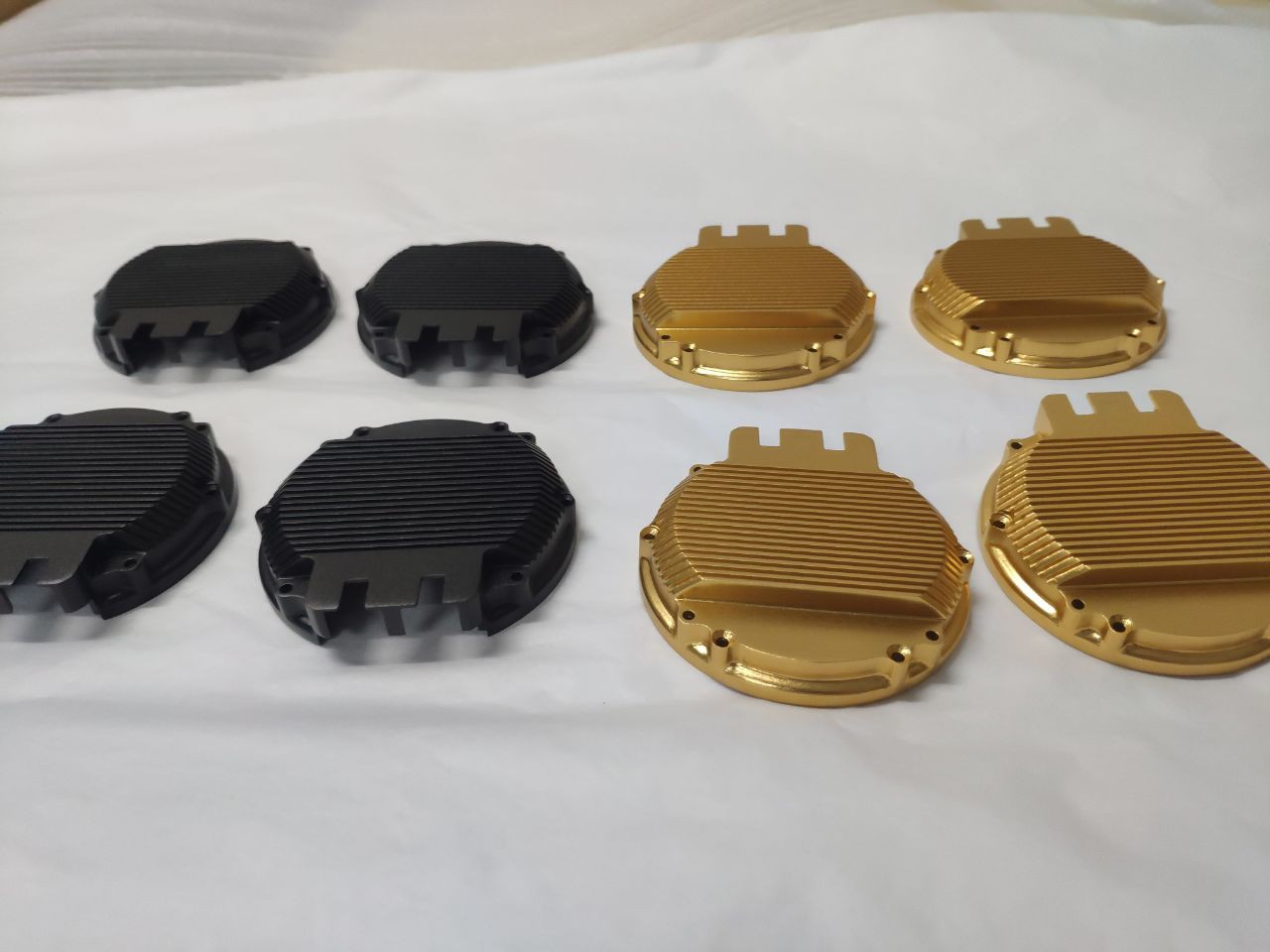
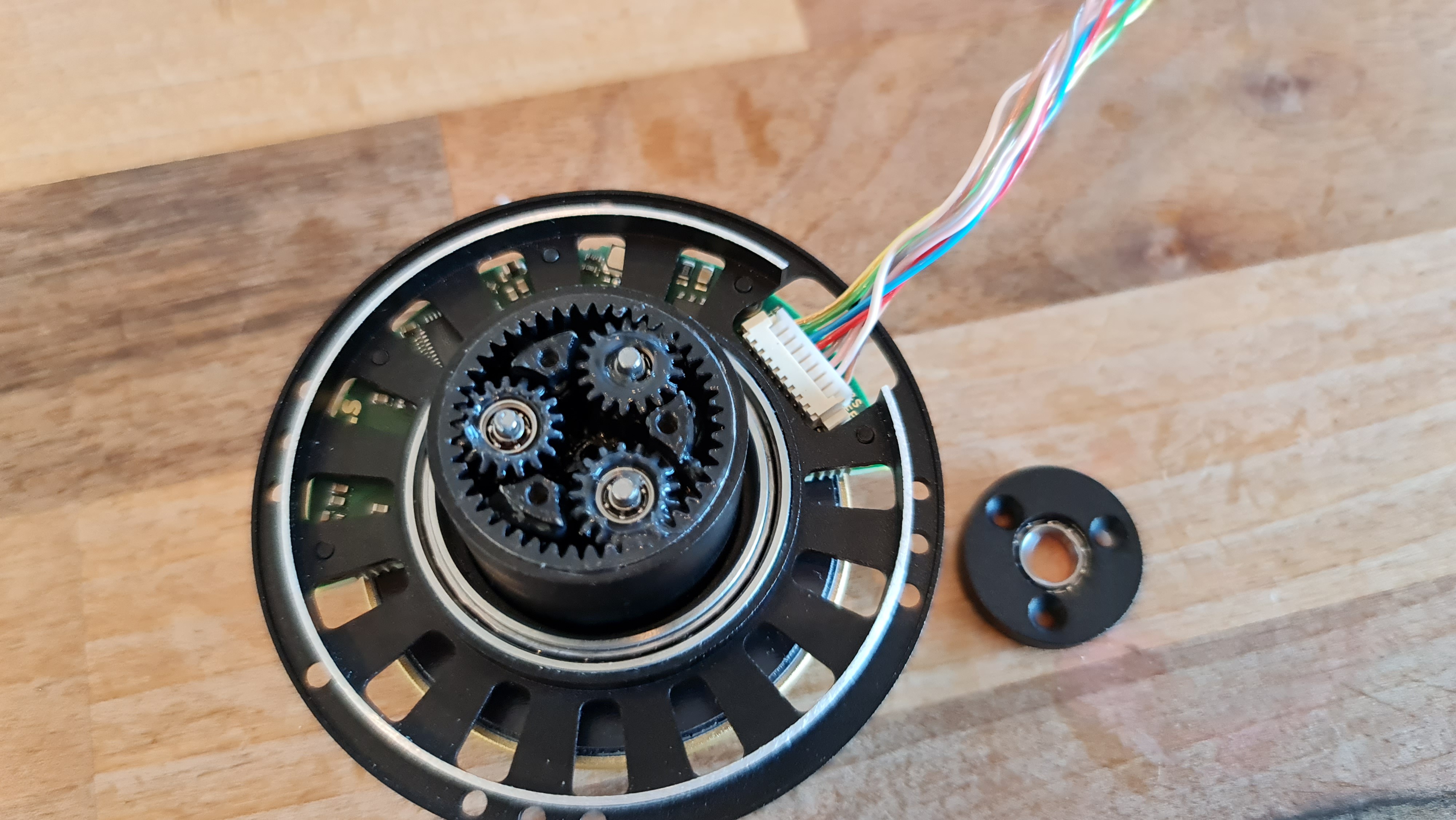
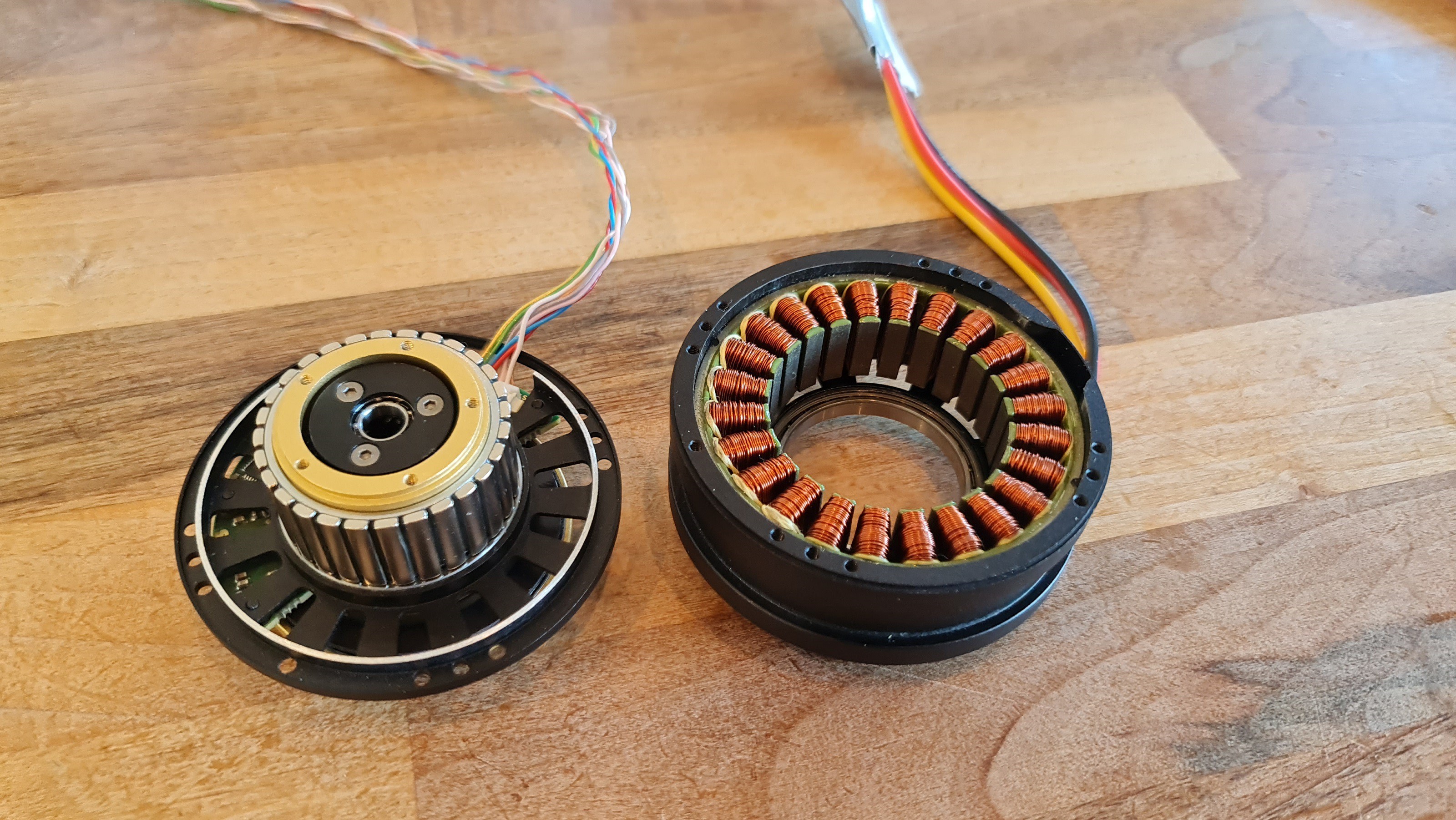
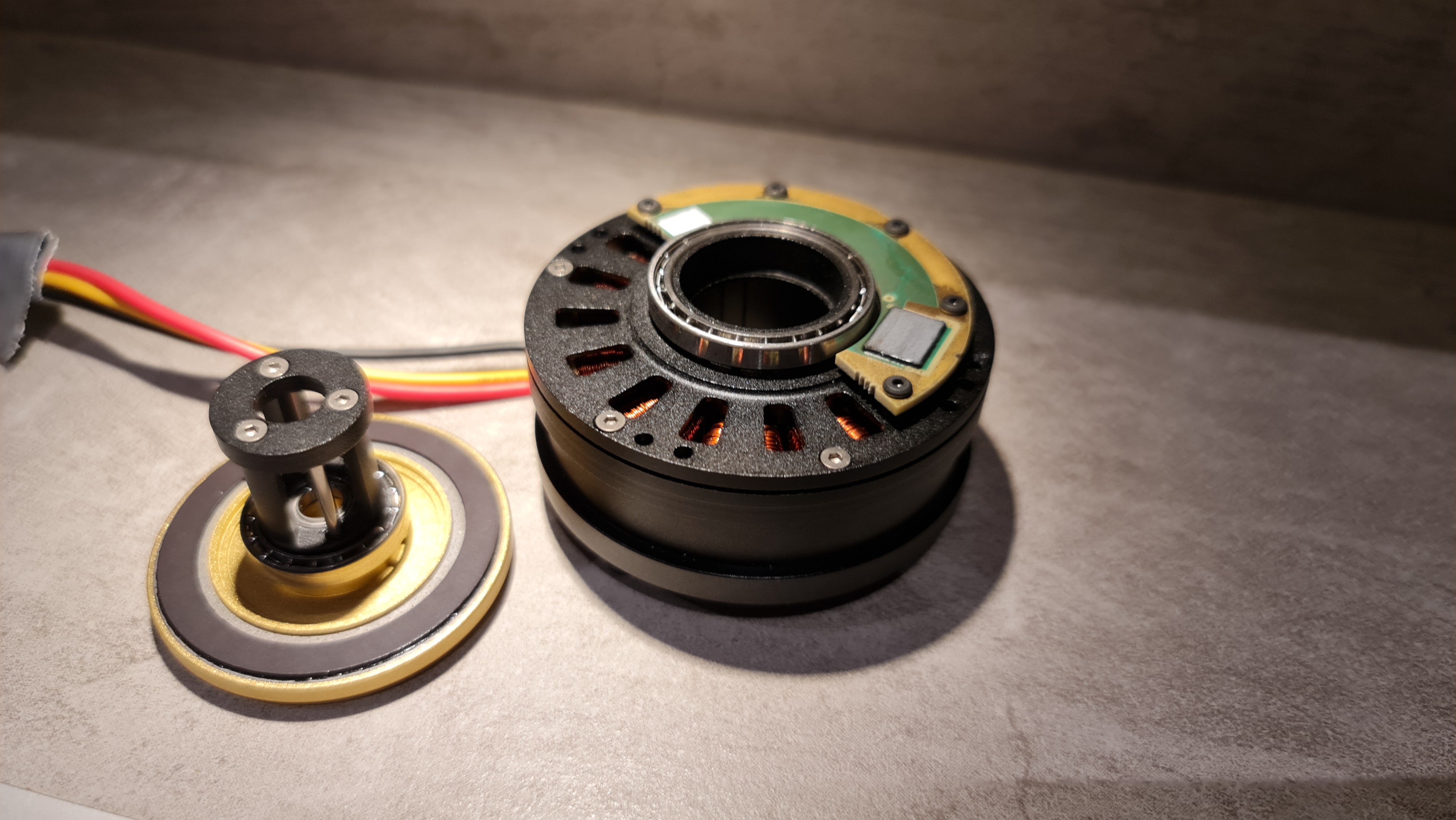
Kitt actuator
Small size actuator 67x48 with 5.4:1 reduction ratio and dual encoders.
 Robin Fröjd
Robin FröjdBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
















 Pavel Surynek
Pavel Surynek
 Dimitris Xydas
Dimitris Xydas
Hello! First of all, I have to say that this is an awesome project, I like it :) I have a question: how can you assemble the rotor of RI60 with the output shaft? It seems that the RI60 rotor doesn't have holes for the screws!