This is essentially how I imagined this curve would go… ish… it's kinda boxy though.
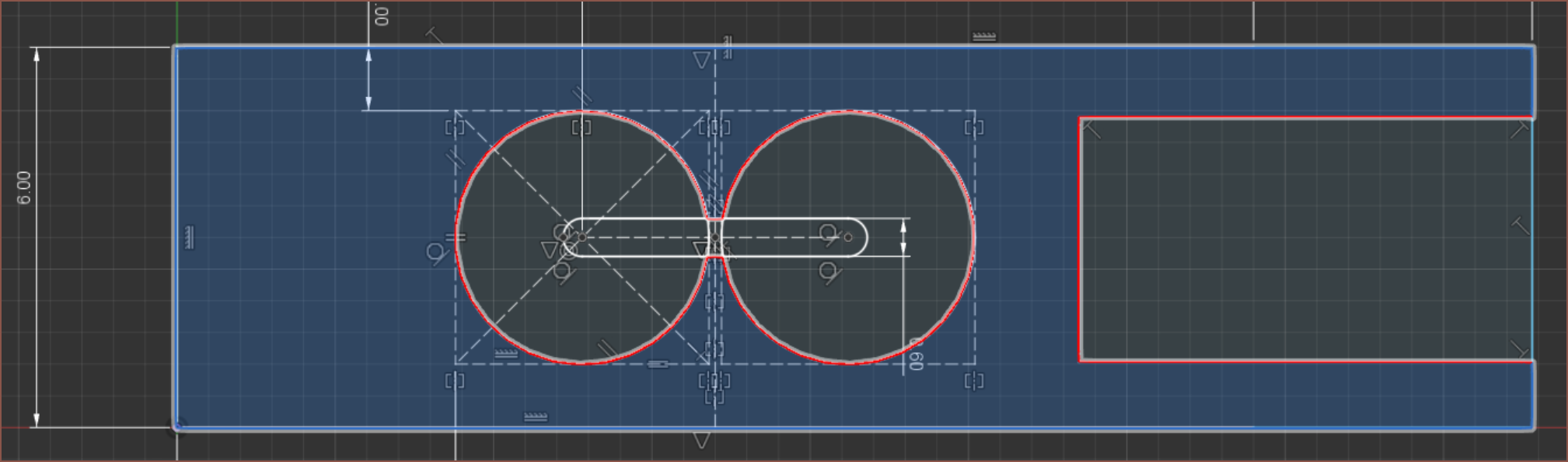
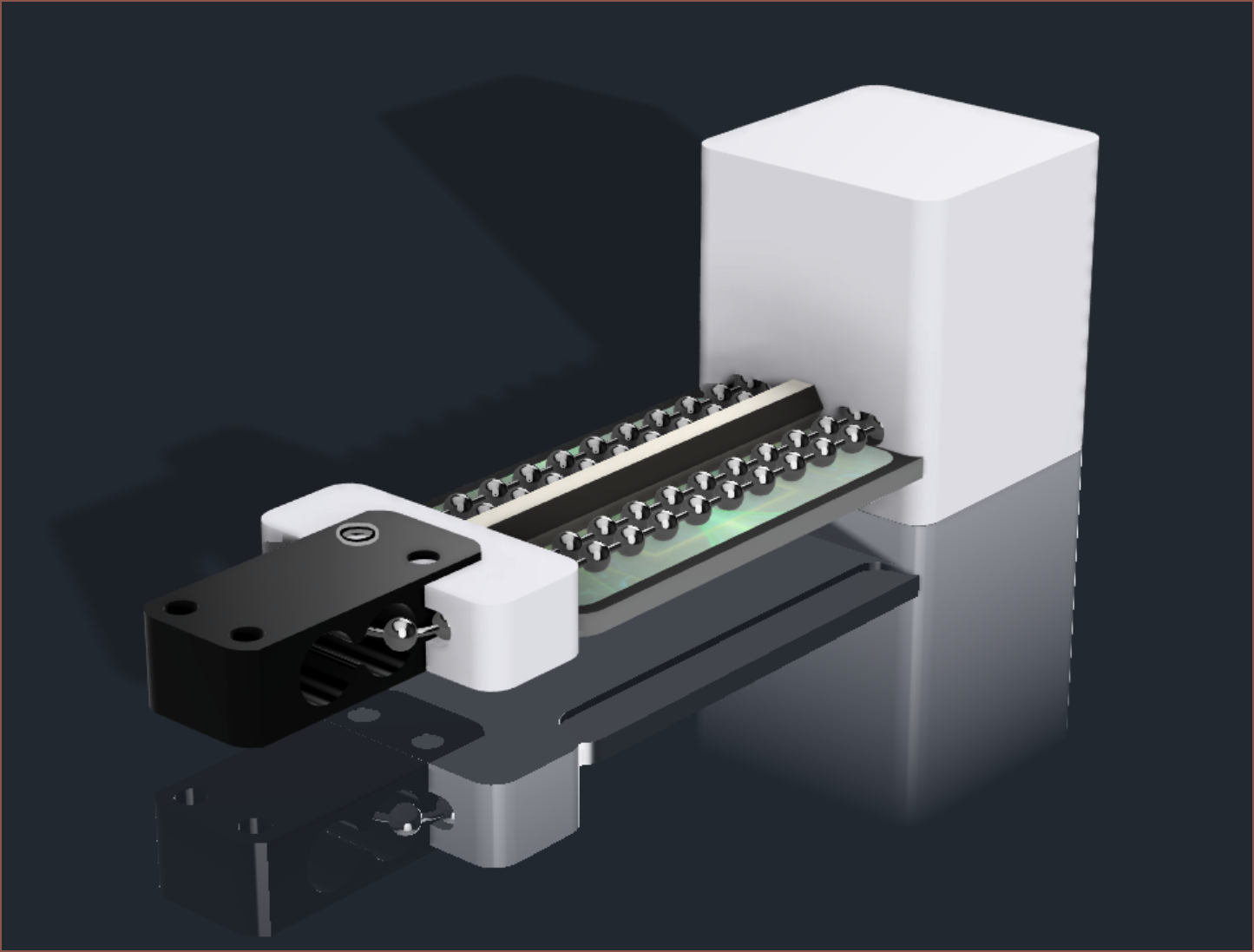
I've also moved the strain guage right to one side so that I have space for some kind of linear slider. I need 33mm and since the total length target is 70mm, I might as well say I need half that (35mm). Ok I've made some arbritrary-angle cone because chamfering a solid cylinder wasn't working. Why I'm using the bounding box to sculpt how I want the exterior to look, I don't know.THAT'S IT RIGHT THERE. The magic of the Delete Faces command.Changed the bounding box to white and edited the LCD image for more contrast and this looks SWEET.
Maybe now all I have to di is add a filleted chamfer on the end?
This 100% looks like a shoe though, or some robot leg that's been cut off.
Move the motor forward so that the tabs don't stick out...
Add the chain back in......and adjust render settings...
That LCD background I found certainly gives off the "new age" and "powerful inside" vibe I wanted to see for Tetrinsic.
Next week would actually mark the 1 year anniversary of conceptualising Tetent using the OG Tetwin Switches. From that, which only had manual force adjustment, per-key RGB and 5 discrete double-action switches (which meant that I needed 3 fingers for 2 characters), to Tetrinsic that dropped LEDs alltogether and had non-simulated strain guage mount geometry but added in a BLDC motor so that #Tetent Turntable [gd0038] could be scrapped and Tetent could physically move my fingers to where they needed to go whilst learning, to now with Gen 3X1!
I feel like an Apple executive when I say this, but Gen 3X1 is the most customisable and easy to maniufacture Tetrinsic yet. Probably more reliable too now that I've seemingly managed to fit a relatively low cost aluminium load cell that are built to much higher specifications than I'd ever be able to 3D print. The 'keycap' material has been upgraded to stainless steel, 16MB of flash storage for LCD animations and a 33% active area length increase are all improvements from the first Tetrinsic design that I was almost about to build. I'm a bit more sold on the look of Tetrinsic 2.0, but this concept looks MUCH better than the first Gen 3X1 concept.
There's just a price hike, like what NVIDIA's done with 4000 series. At least someone could build a 4-finger Tetent for about £100, which I believe is in the realm of affordability for people that have a lot of digital work to do for their forseable futures..
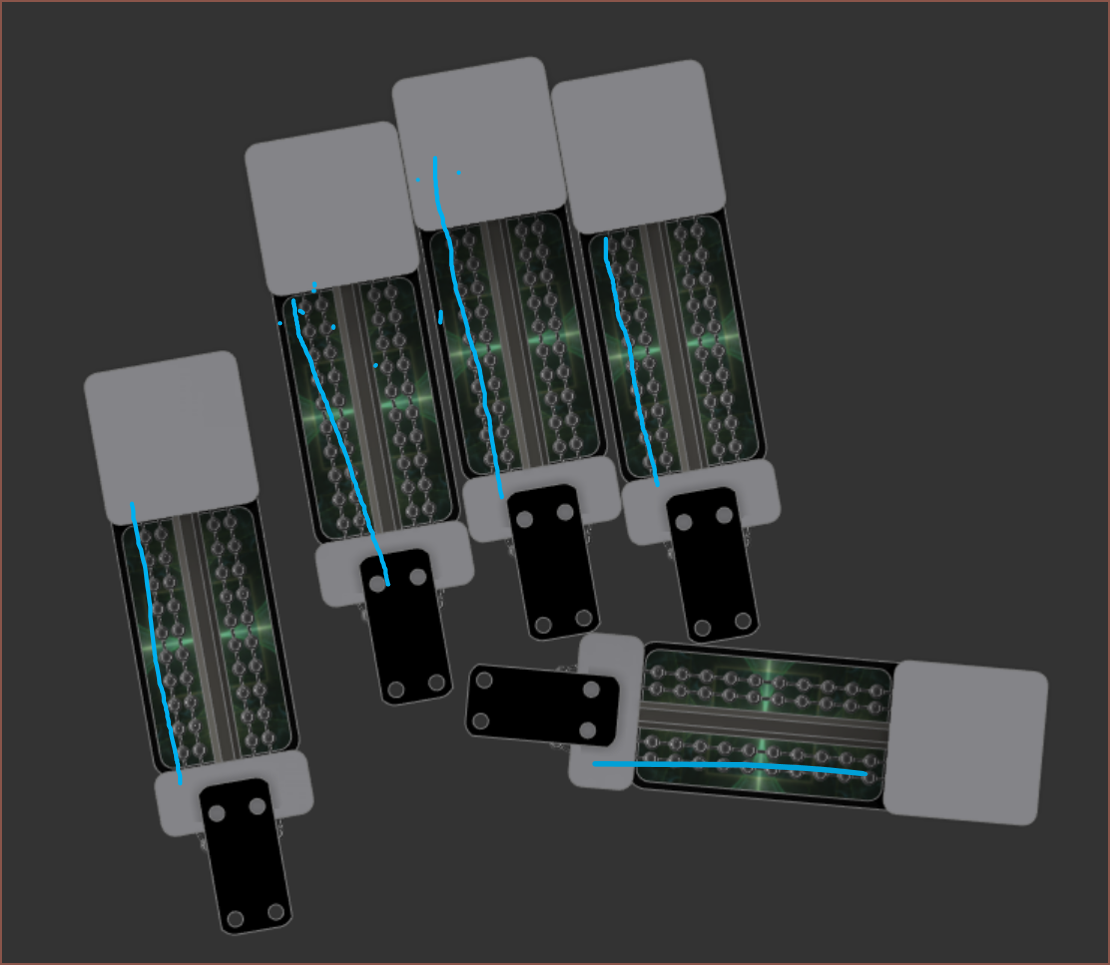
Multiple Tetrinsic's together also looks pretty good actually. It looks more store-bought than I was expecting. I'm wondering if I should make 2 versions where the strain guage is on either side so that I could actually just slide Finger5 forwards instead of the tightly-packed Fingers2-4 backwards.
Oh wow I could actually do that without an intersection? Shame I can't find anywhere to put a 5th Tetrinsic. Well... I could put it along with the others but I don't know if my hands or pockets would accomodate 100-110mm and I don't know of Tetrinsic could accomodate some swivelling. It's probably possible but likely requires the knowledge of whoever makes those Autobot Transformer toys. If that was the case, the TimerSpy could be symmetrical like what I was doing in #Tetent [gd0090].
I'm still kind of just staring at the sketch, wondering how things would fit together.
I have a cool idea which is to have the top cover kind of just curve around the top of the motor which just so happens to look and feel premium enough to keep it uncovered. (Perhaps, if someone is so inclined, this Tetrinsic could be used both as a slider and knob.) I'm visualising something similar to those "black-background car side" pics. I'm also thinking of mounting the motor using a grub screw; if those things can hold an FFF 3D printer extruder gear in place, it should be able to hold the motor in a fixed position. If successful, that would further cut down on the amount of additional tools needed to manufacture this.
I think a PCB solution could exist where the screen and motor flat cables could be soldered directly on.
It still seems like I need to consider a conceptual #Tetent TimerSpy [gd0136] solution for design questions like "how should Tetrinsic be mounted?", so I updated the file:
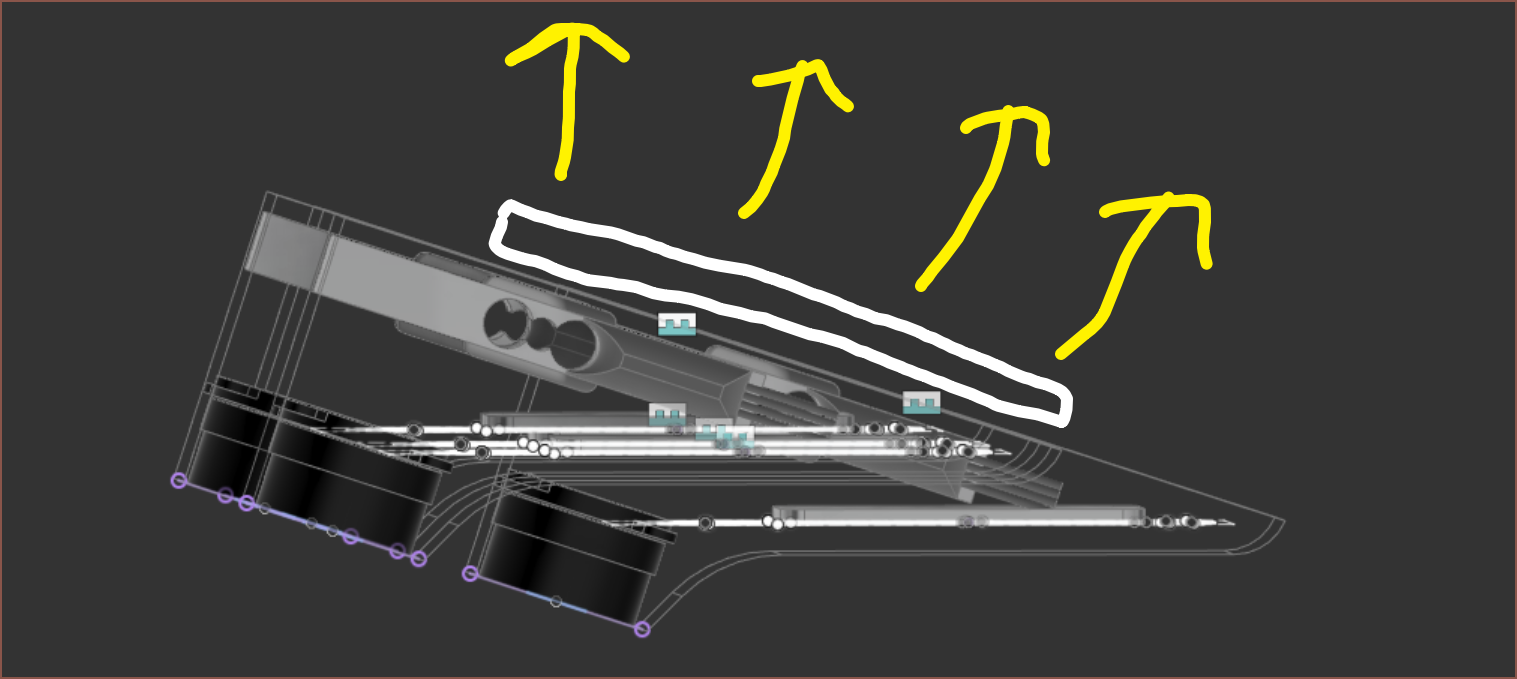
I don't think I'm going to be able to get a solution that has Thumb1. That's ok though, as I still consider a 4-finger Tetent a fully featured one. Additionally, I'm thinking of having the Tetrinsics slide out (using the help of springs) so that TimerSpy is compact enough to fit on the back of the hand. This means that the fingers have slightly different elevations, and Finger5 is much higher than the rest.
I stacked some magazines up to test, and it seems that my hand doesn't complain with the height difference. It does complain if it's the other way around. This also helps with keeping TimerSpy thin when on the back of the hand, and has the benefit of slightly tilting the main screen towards my eyes.
The height difference between Finger5 and 4 is only 8mm though, It looked way larger and I tested maybe a 20mm difference..
The minimum gap is 1.1mm due to 20.5mm finger spacing (which I think is fine) and the entire width between Finger2-5 is 86.4mm, which should be ok for wearability. At that size, it's likely that TimerSpy would keep the 3.81" 90Hz AMOLED screen over the 2.9" 120Hz LCD planned to be used in #T^2 TyMist [gd0138]. If I can get the base length down to about 70mm (currently 75mm), I could have a nice, thin bezel.
I thought about it overnight and started the day with a simulation:
This is a 500g load cell. I tried all fingers on a scale and they all went over 300g with some over 450g (the max safe overload of a 300g load cell).
Then I went to plan it, and the solution failed due to instersections between the load cell and the motor block:
If I went with the 750g load cell, I could cut it to get it to fit. Even then, the silicone protection makes the max thickness somewhere around 8mm and things would likely intersect again.
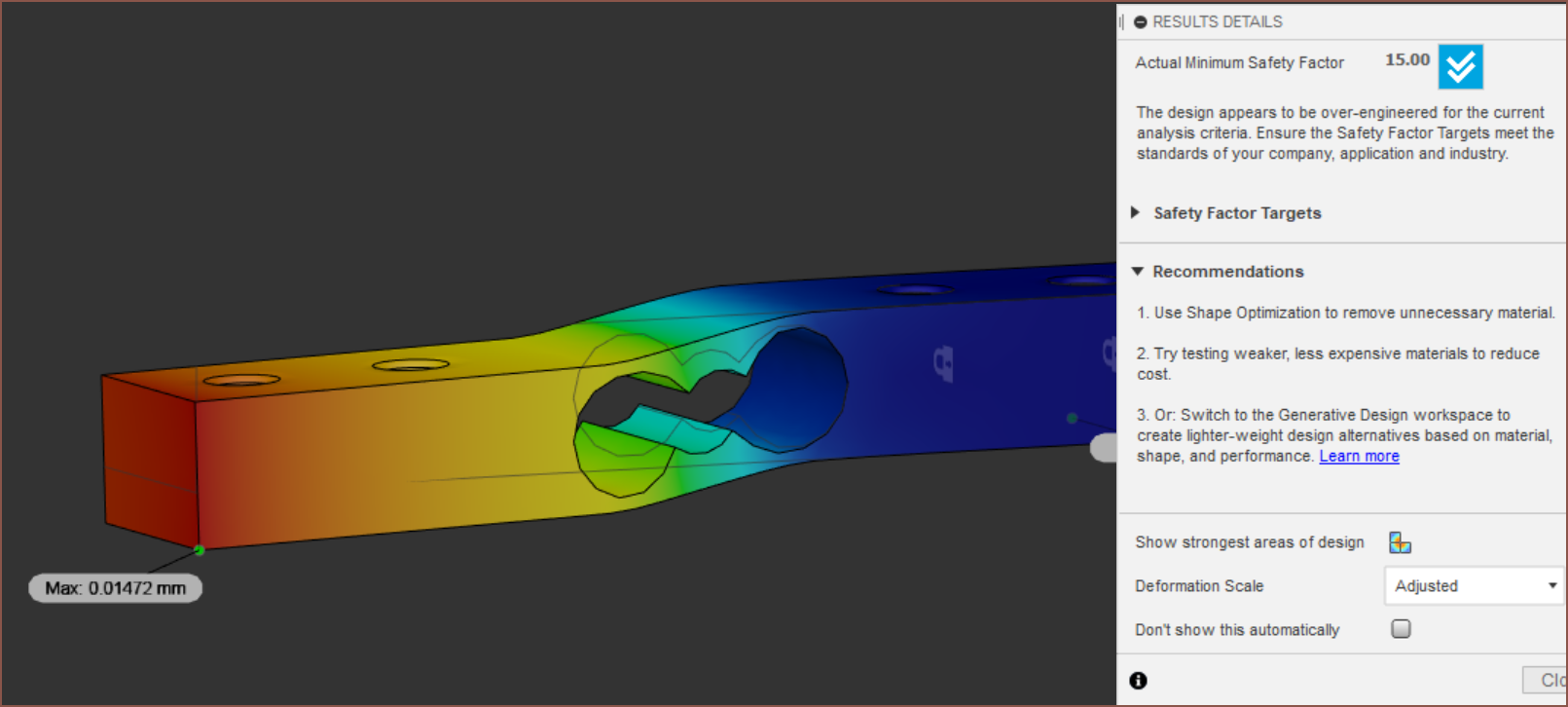
Then, I thought about how much of an impact a small 17.5 degree angle would be to the load cell. 1/cos(17.5) shows that the load cell's rating would only increase by 5% (e.g. a 300g load cell would become a 314g load cell). I did a simulation and the bending shape still looks fine:
I'd never get sub 40 microns of movement from a printed cell.
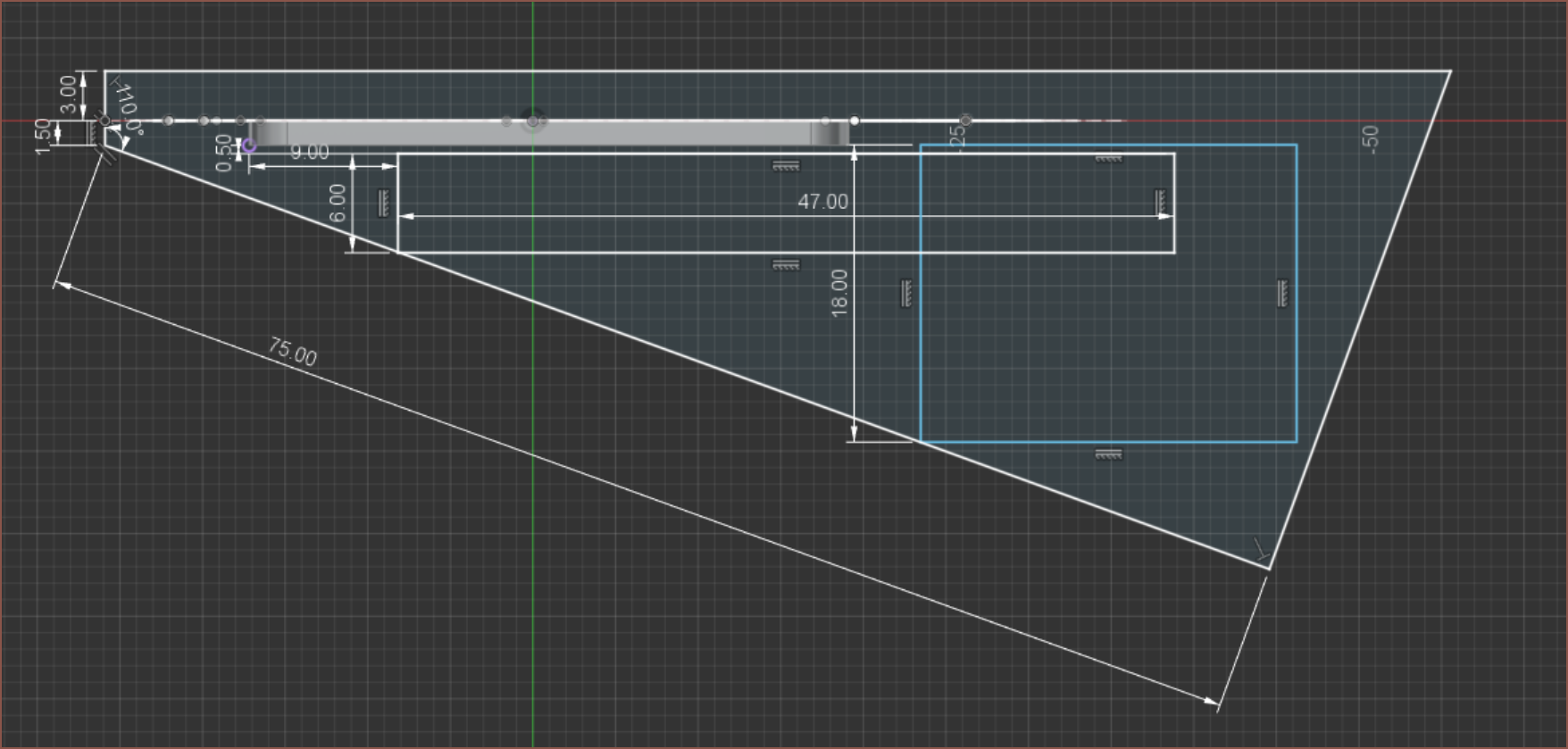
Sketched it in Fusion:
I'm also wondering if I should wrap the ball-chain around the sharp edge (where that R2.5 arc is).It fits so I set up the 750g load cell simulation:Way overbuilt, but the other version of this cell is rated for 300g, which is not enough. Additionally, I have to consider the forces exerted on the mounting points, and the mounting method on this is much more likely to be rigid. Lastly, all holes are tapped on this cell, which isn't the case for the 500g cell.
The BOM is now £23.38/each, but now I can use an over-rated, off the shelf, precision load cell instead of having to print and build 10+ mystery-machine load cells.
I think a solution exists for a 19.4mm Tetrinsic (LCD width limited) and I think #Tetent TestCut [gd0139] could work with that slight over-surface protrusion.
I'm still mining for a TimerSpy solution and trying a process of elimination to obtain a solution. I'd rather not drop Thumb1 but 4 Tetrinsics = 1/2 a Tetent. Until proven otherwise, a 5th Tetrinsic is just a bonus quest.
One of the things noticed was that my hands go into my pockets all the way to the wrist, and that the pockets would rather have a guadual thickness increase instead of a micro wall/step. This means that the current solution would catch on the motor blocks anyway, no matter how thin the load-cell side section could be. Additionally, I'd rather not test 2 different Tetrinsic designs where 1 has the motor above and another below the active area.
Having a door-stop-like shape would solve these issues, and give me more space for a strain guage solution. It would also likely look less clunky on the backs of my hands.
For the force sensing, I've been thinking about this video and solutions that could be made from off-the-shelf components or a custom aluminium PCB {video below]. Unfortunaltely, it doesn't seem like there's actually that much information outside of strain guages that are bonded to metal, so it seems I'm still going to have to learn as I go with the printed load cell solution.
I'm thinking that Thumb1 is going to be tough to fit in the space provided on the back of my hand. I still think it'll be really nice to include it though; what I've learned from Tetent concept prints is that fingers don't really like floating in air whilst others are doing precise motions.
This Tetrinsic proposal is still Gen 3X1. I count different generations based on the PCB. If I could use the same PCB (or PCB idea), it's the same generation.
Now that there is a potential TimerSpy layout where Finger2 doesn't intersect Thumb1 as incorrectly predicted, it seems possible to use bolts under the LCD for rigidity. I'm already expecting that the PCB needs to go that low, and potential designs should still be relatively thin and pocketable. I think as long as I'm under 10mm for the height nearest to the knuckes, the solution should pass.
Wait a second. The load cell is 6mm and that doesn't include the wires. Additionally, material that's thick enough needs to actually hold the Tetrinsic in place, but somehow Thumb1 needs to move to a different location. And all that is saying nothing about how thick just the quick release glove is. Sigh... going to have to go back to the drawing board. Wearability prospects are looking bleak again.
At the same time, I'd likely have to move onto the PCB tomorrow. I'm thinking of trying to make everything fit in that white cube. Part of the reason is that I could then design the cube to be seperate to the rest of Tetrinsic and mount where there's space. I stil want to have TestCut look like a cuboid without a handful of smaller cubes sticking out of it.
I went into powerpoint and roughly drew what lines my fingers took, and where. Then I lined it up in Fusion 360 and the angles match what I expected when I proposed this new TimerSpy solution.
The assumed plan was for Finger2-4 to be 6mm lower than 1/5, but I've just tried it (by using my other hand as a spacer) that the inverse feels much less constricted.
As you should be able to see, the reason for the thinness is because I was planning to extend Finger2-4 under Thumb1 and have the motor block on the other side.
It does seem like things are still going to be a tight fit between Tetrinsics though, but at least this layout idea doesn't need to be fully 3D printed to get an idea of the fit.
The main issue right now is that it's too large to neatly fit on the back of my hand. Most of the reason is because of Thumb1 though.
Now I've done some more repetative motions and it's mostly OK other than Finger4 which wants a different angle for some reason.
I'm just going to have to hope I get used to it and that the spacer does its second function of allowing the chain to "lean" on it.
It's also interesting to see that all fingers, even Finger5, can do 32mm of travel perfectly fine.
After tweaking the Thumb1 Tetrinsics location, it's starting to seem like I could just about fit everything on the same plane.
And this is starting to look kinda cool actually, like robotic hands:Brass' natural colour does seem to break the vibe a bit though.
Looking at the layout again, and trying it, I've moved Finger4 up. Looks a bit tidier too.
I have a feeling that these would make passable haptic gloves for limited MR scenarios. Like, it won't feel as free as actual gloves but the gestures performable on this could be intuitive.
The name "Gen 3X1" comes from a fake USB name I thought up when hearing about USB4 Version 2.0. Since one of the features was that monitors could take 3 lanes for 120gpbs -> monitor, 40Gpbs -> PC instead of the 2X2 of 80gbps each way, I boarded that USB naming convention train and called it "USB4 Version 2.0 Gen 3X1". I like how it has every number from 0 - 4.
I looked on the internet to find a new LCD background so that I could get that "Gen 3X1" vibe whilst modelling. I saw [1st image] and thought it had potential, so I moved the hue 180 degrees and I think it looks like some powerful, elf magic mana discharge [2nd image]:
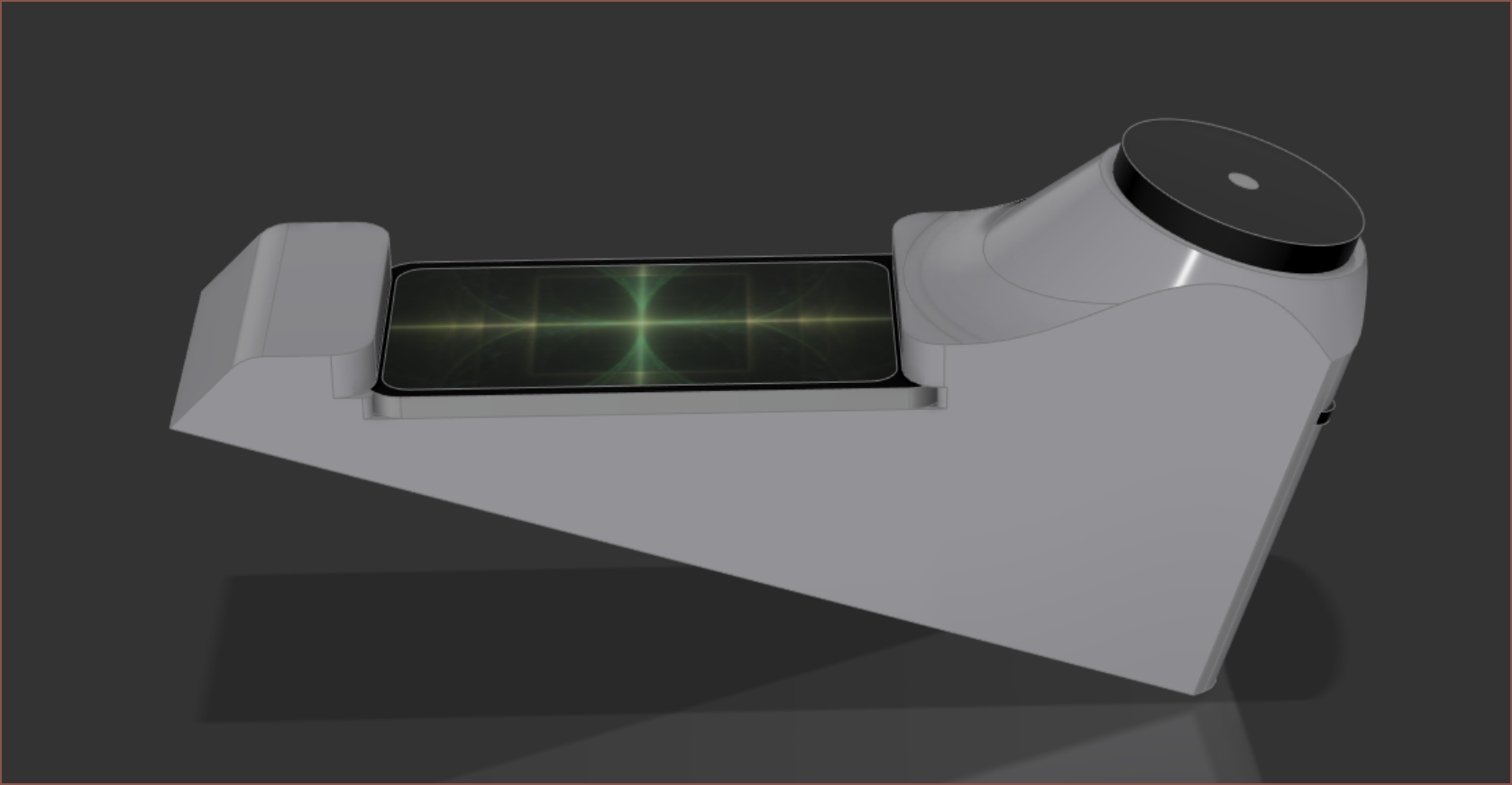
This certainly has the vibe and energy I was thinking of when I thought up the "Tetrinsic" name!The thing is... I expected the concept to look better: Maybe it's because of the motor block that it just looks off-balance? The nice thing though is that I wouldn't have to cut off any tabs with this design.
I doubt it's the render image, but maybe I should've gone with the colder/higher contrast looking 200 degree hue shift?
I liked the warmth of the 180 degree hue better, though it looks almost too green in the render.The brass spacer took up less visual area of the screen than I feared. Also, the white blocks are actually wider than the larger screen I found anyway, so I might as well use it.
I still kind of think that the only reason why it looks strange is because it's top heavy. The reason is to prevent finger intersections, particularly from Finger5. This is what it could look like if I went with my original plan of having the motor near to the palm:
The minimum thickness is about 6mm as expected.
I'm expecting that the load cell will have a cutout to be able to insert the ball-chain and then a spacer goes inside the gap and screwed down.
It's interesting to see that the BOM so far is very close to the £20 figure I had in my head. I'm thinking of getting 11 just so that I have spare components should I break something in testing.
About the brass spacer, I looked up and down AliExpress and Ebay for a silver coloured one, but it seems that the M2 yellow brass spacer is the only one that is likely small enough to work. The good news is that it's also the cheapest option by a decent margain.
An aluminium one is 4mm and stainless steel is 4.7.
The requirement of the beam also means that the centre of the LCD isn't visible. This might not be so bad though, as now 2 seperate animations on each side could be done without looking strange.
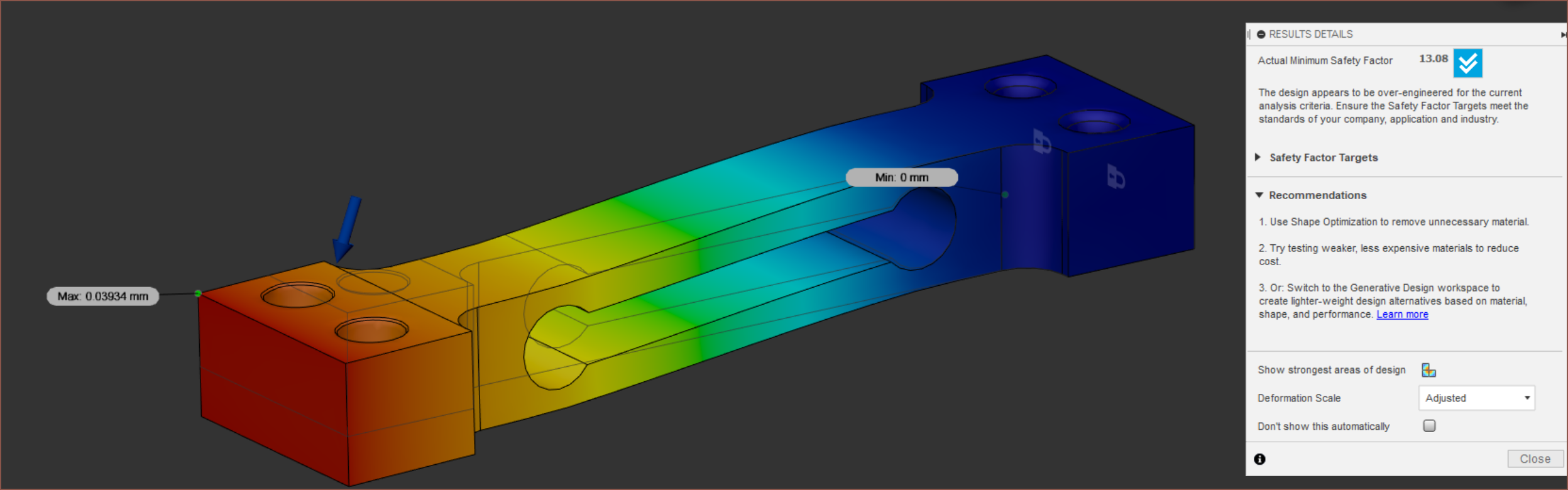
Whilst on the subject of the CAD plan, I've decided to take the outer path through the load cell to reduce on overal length whilst having more material in the connection point between the load cell and the small block.
[22:30]I've gotten this far, and I'm already thinking that the thing has to be mounted upside down so that the fingers don't intersect the motor block (opposide end of LCD).
The active area needs to be thin but otherwise rigid, so I'm thinking of using some stainless steel bolts that are smooth other than the ends. I'm having trouble finding that though in stainless steel.
Screen choices
The ball-chain needs to slide on something, and the LCD is an ideal size and thickness, so I might as well keep it in the design. On that thought though, if I'm now able to layer adjacent Tetrinsics due to its thinness, I could actually have an even bigger (but still under £2/ea) LCD. From research with the 1st Gen Tetent, as long as the overlapping sections are under 3mm, a solution is possible. Additionally, with the new TimerSpy design proposal, I think I could have up to 80mm of max length for Tetrinsic. However, bigger screens have more pixels to run though, so perhaps there is reason against such a change.
The only candidate I could find is this 1.47" TFT that has rounded corners and a slightly thiner bezel and overall thickness. It still uses the same driver IC so that's nice, and about 70p more than the 1.14".
The increase from 24->32mm could be beneficial from an ergonomics and usability perspective too. Other than the £7 BOM increase, I'm not seeing many drawbacks, and the benefits are a longer active area, a more bezel-less looking screen (the chin is smaller too) and a higher screen to ball-chain ratio. I also wouldn't be suprised if the colours look better on this panel either, since it just overall seems like a more modern one. Oh, and it might look even better if the Tetrinsics are layered, allowing for animations that span across multiple elevations. Other customers also seem to like the slightly larger, rounded edge screens:
I'd likely have to conform and use rounded rectangles instead of filleted chamfers for aesthetic consistency across the design now, but I've otherwise made my simple but escapable choice.
[23:05]
So this was the idea I had in mind before I determined that the motor needed to be on the side away from the palm. It doesn't look like i'd have the space for a load cell body anyway, and the side m3's I was about to add just made the top box too wide. Since the small top box would be in the position where the Tetrinsics are the closest, it should be as small and thin as possible.
[23:50]
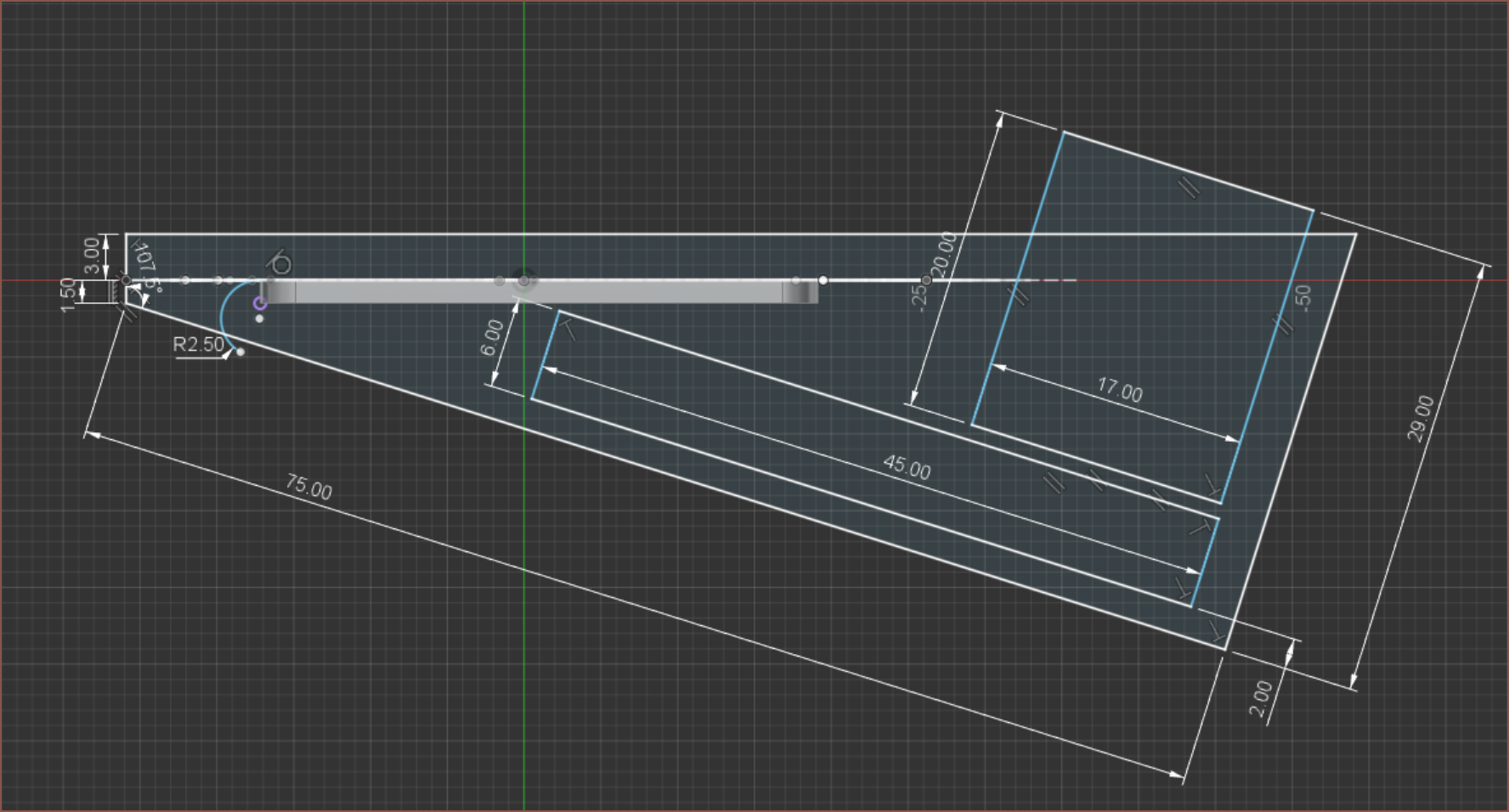
Ok. I've already hit the max allowable total length but this might work. Those 4.4mm circles at the top represent the ends of the cutout for the load cell geometry. The main issue I can see right now is where the load cell connects to the small block. Right now I'm imagining a shape like this:
I don't think I'd be able to magic up an entire TimerSpy solution by the end of the month. In a way, I kind of don't need to. What I need at the moment is a proof of concept that I can actually use now, which would be #Tetent TestCut [gd0139] (which just got a project code right now).
What I need is to know that a solution could be made for TimerSpy using a chosen Tetrinsic design. I had doubts about the relatively large bezels in the Tetrinsic redesign, and those worries were warranted because the TimerSpy solution failed.
I have a feeling that the new "thin where it matters" approach has a decent enough chance of a solution without having to get TimerSpy approval first.
If I hope to have something physical by the end of the month, I very likely need to have a design and PCB ready to go by the end of the week. Now, to me, this sounds like a serious sprint, but perhaps if I imagine that I already did the work and then lost it, meaning I had to redo it again, I might have the confidence needed to just dive in and get it done. I already have the thing mostly modelled in my mind anyway.
Yes. I just need the courage that I'm on the right path.
There is nothing used like Tetrinsic or Tetent that actually exists yet, so I'm just walking in the darkness, trying to reduce my decimal odds of success. There's still many unknowns though that will exist until I actually start making Tetrinsic.
Current itenerary:
Design the CAD and print concepts
Design the PCB
Order parts (and spares)
Potentially get an RP2040 and a screen with the same chip as the 1.14", but it seems that they all come from AliExpress anyway.
This might be a part where I can't realistically do much for 2 weeks except print concepts to fine tune the ergonomics, or maybe even make a Windows app front-end for it.
Put PCB together. Test it.
Put Tetrinsic together
Design TestCut and print
Mount Tetrinsic into TestCut
Program most of Tetrinsic
Make more Tetrinsics and connect them so that I can program that feature
Solution mining... ends, in 29 days.
(I think having this line at the end of the last log written in any given day is a cool opportunity I don't want to pass up)
 kelvinA
kelvinA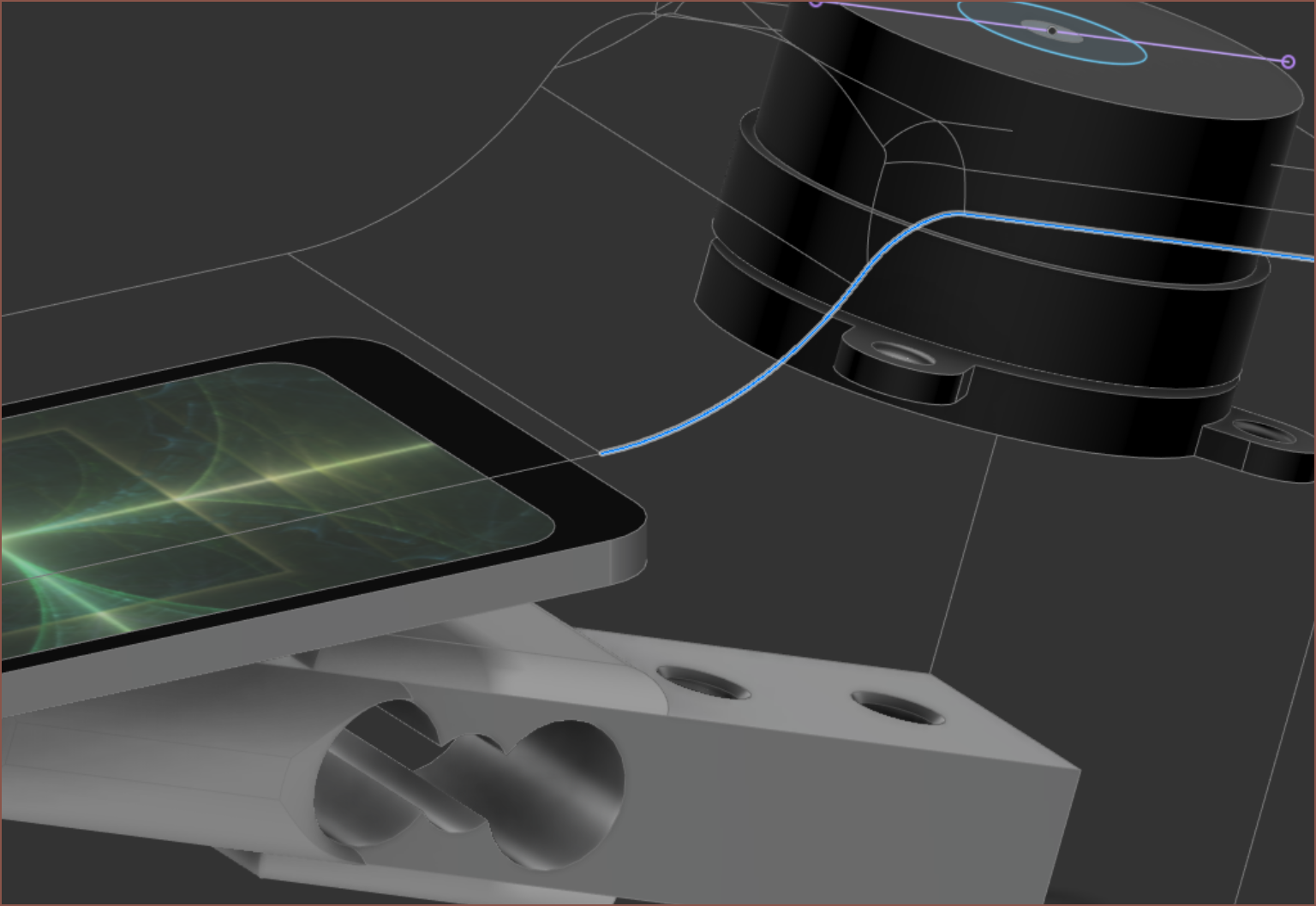 I've also moved the strain guage right to one side so that I have space for some kind of linear slider. I need 33mm and since the total length target is 70mm, I might as well say I need half that (35mm).
I've also moved the strain guage right to one side so that I have space for some kind of linear slider. I need 33mm and since the total length target is 70mm, I might as well say I need half that (35mm). 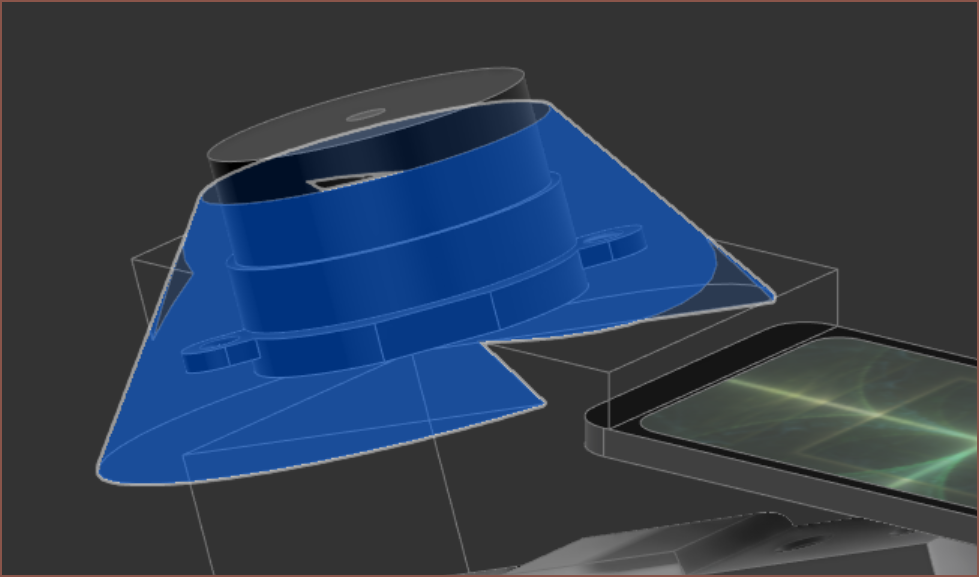 Ok I've made some arbritrary-angle cone because chamfering a solid cylinder wasn't working. Why I'm using the bounding box to sculpt how I want the exterior to look, I don't know.
Ok I've made some arbritrary-angle cone because chamfering a solid cylinder wasn't working. Why I'm using the bounding box to sculpt how I want the exterior to look, I don't know.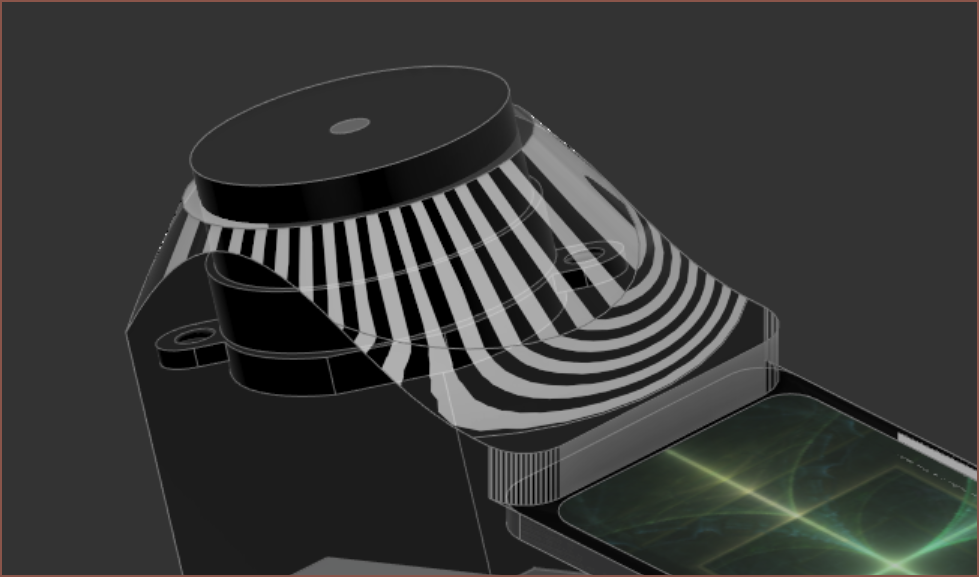 THAT'S IT RIGHT THERE. The magic of the Delete Faces command.
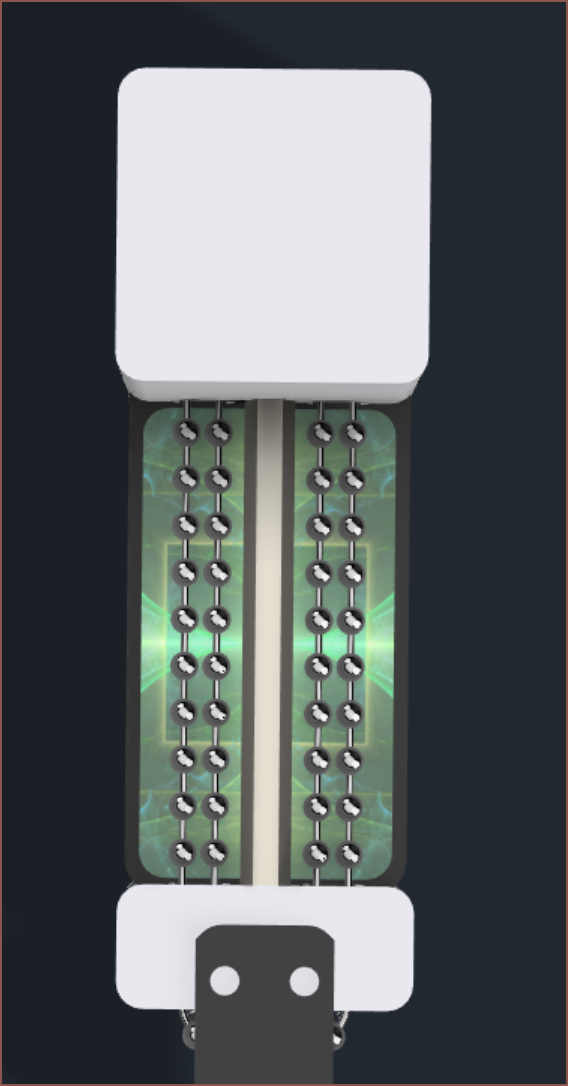
THAT'S IT RIGHT THERE. The magic of the Delete Faces command.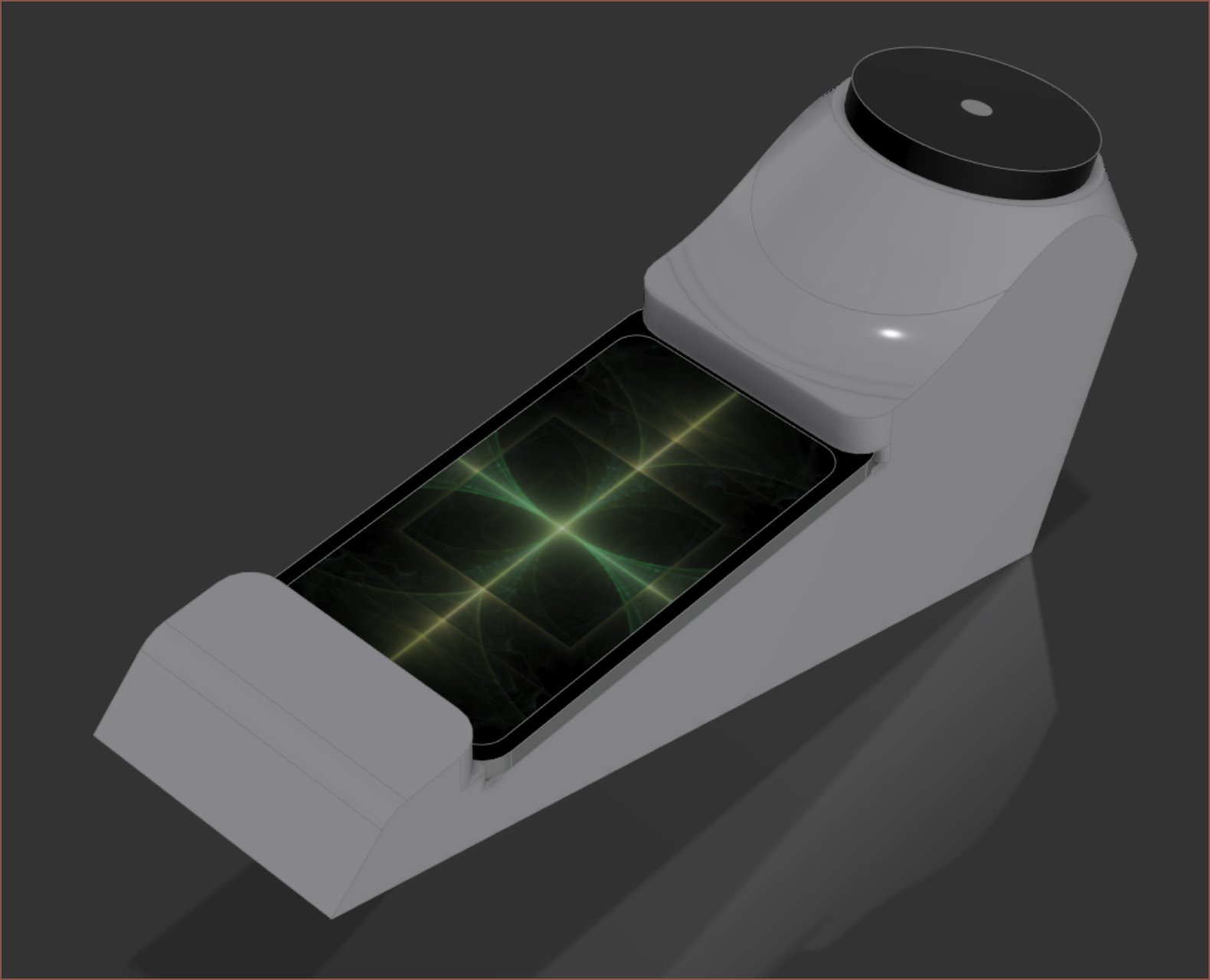 Changed the bounding box to white and edited the LCD image for more contrast and this looks SWEET.
Changed the bounding box to white and edited the LCD image for more contrast and this looks SWEET.
 Add the chain back in...
Add the chain back in...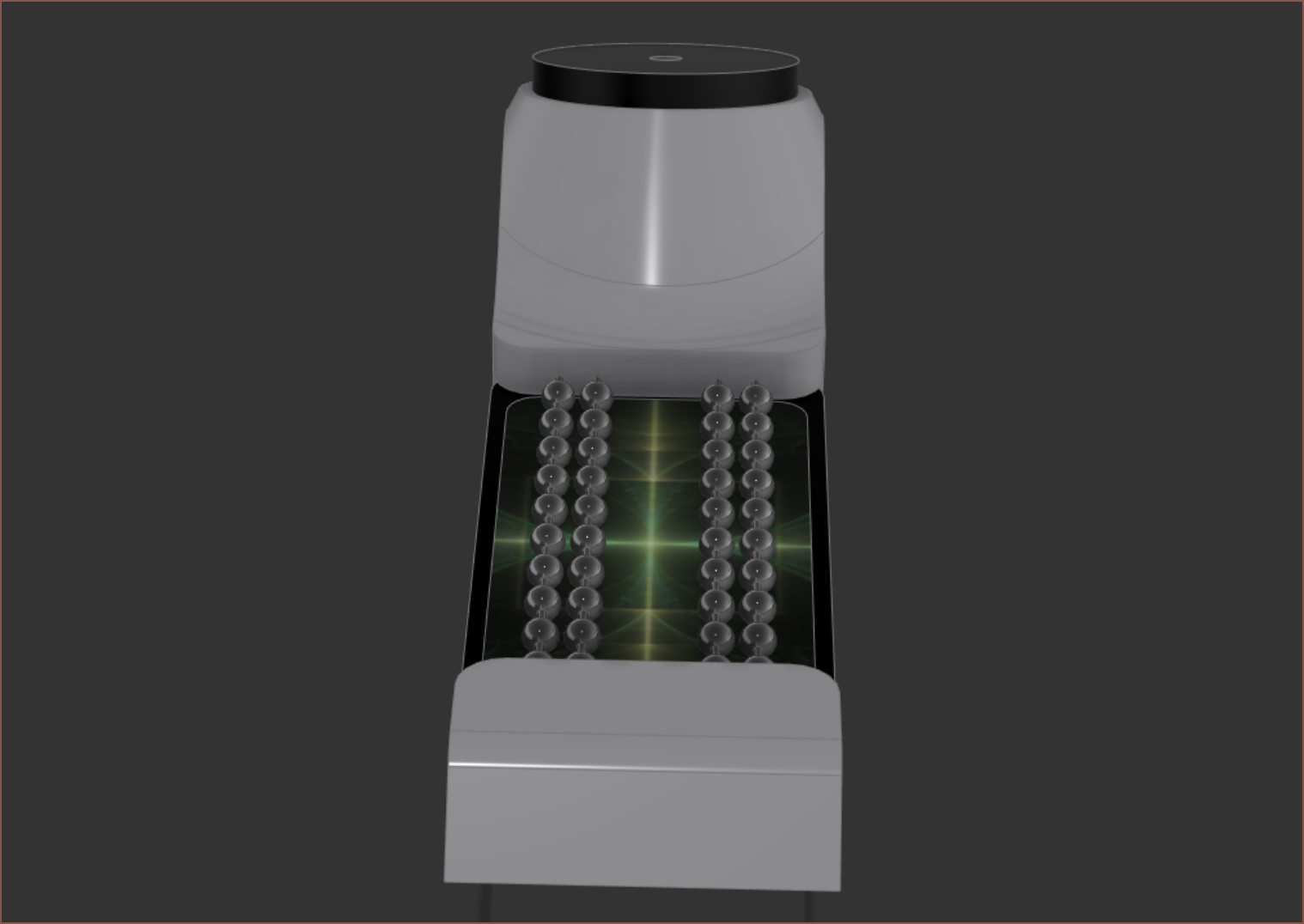 ...and adjust render settings...
...and adjust render settings...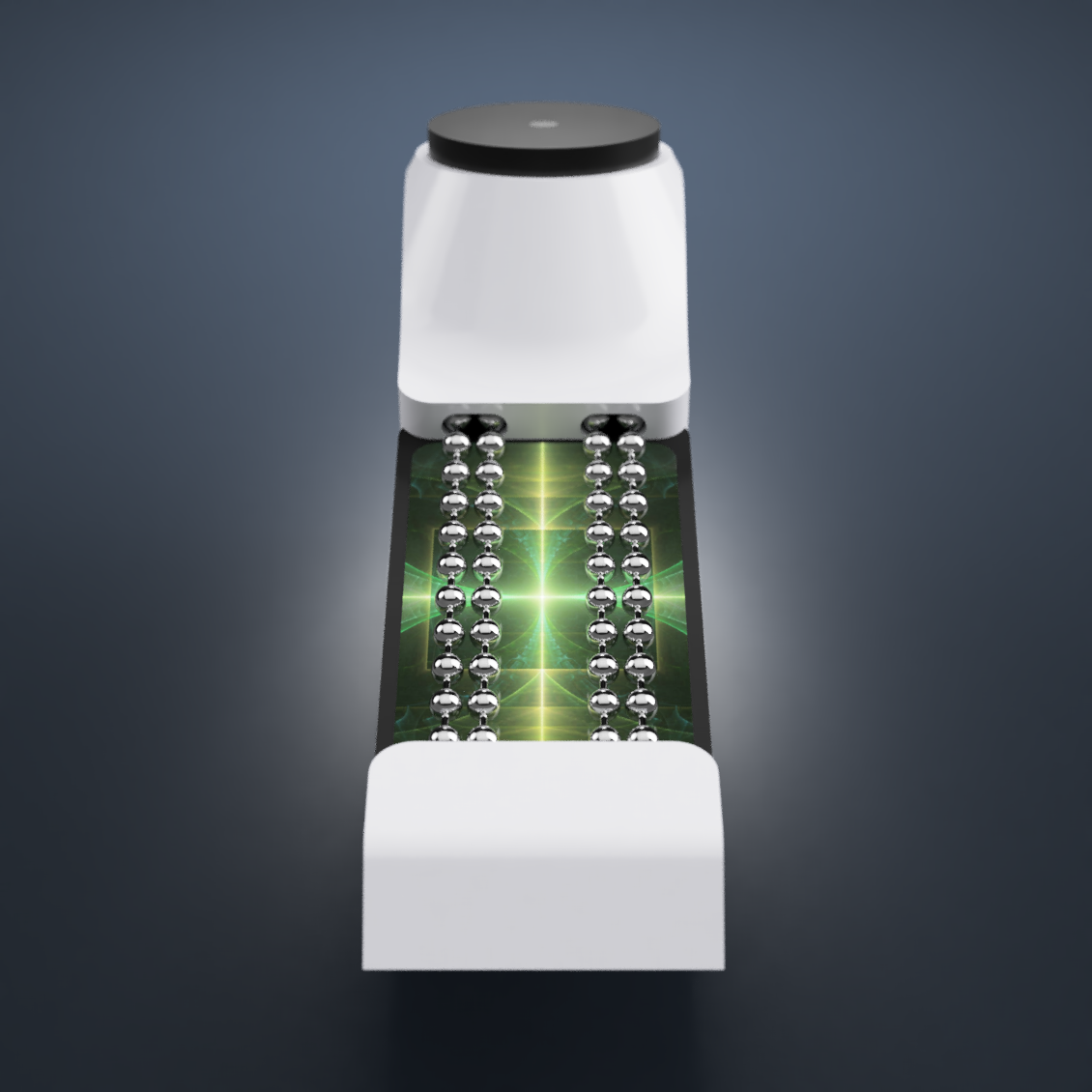
 That LCD background I found certainly gives off the "new age" and "powerful inside" vibe I wanted to see for Tetrinsic.
That LCD background I found certainly gives off the "new age" and "powerful inside" vibe I wanted to see for Tetrinsic.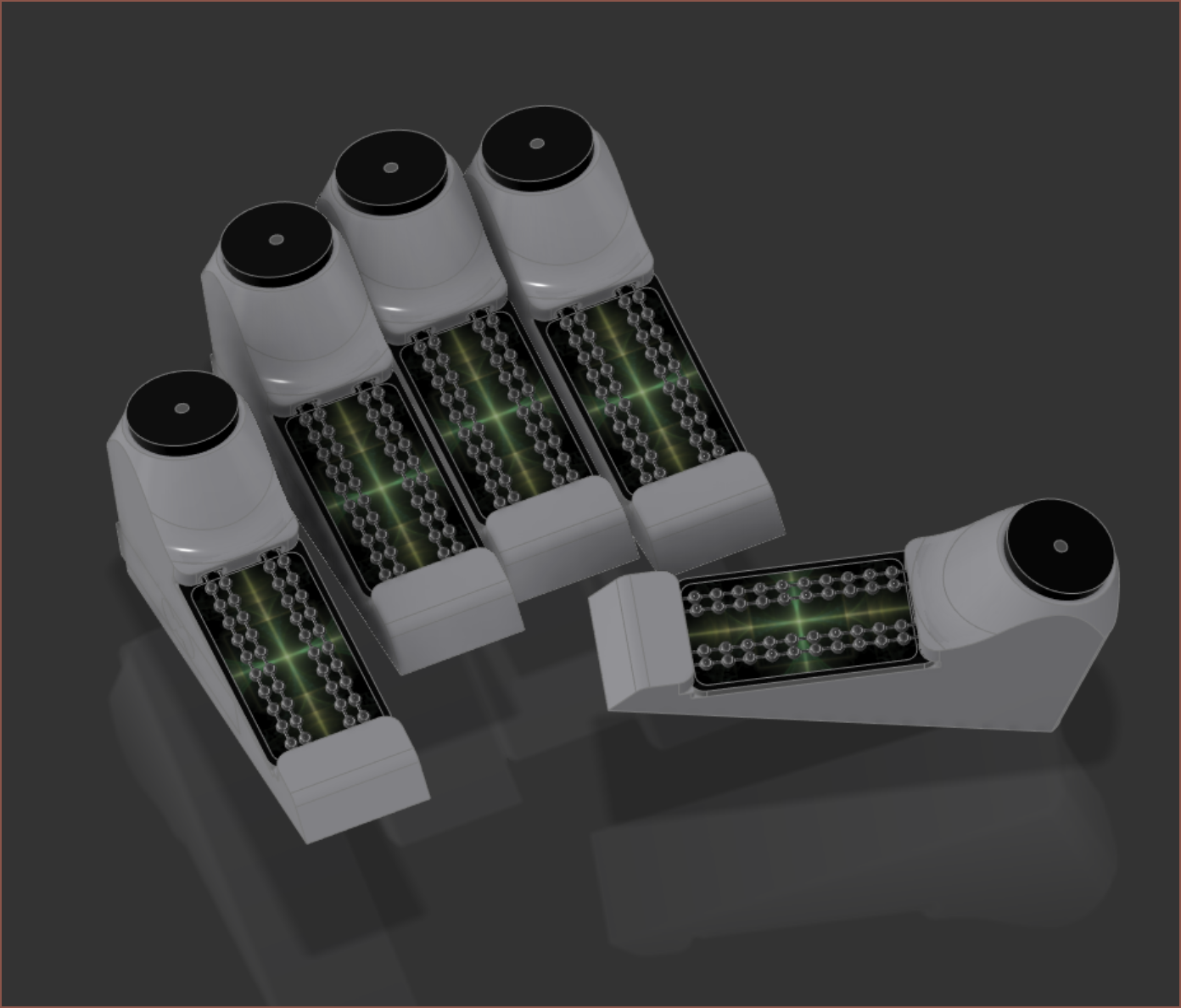 Multiple Tetrinsic's together also looks pretty good actually. It looks more store-bought than I was expecting. I'm wondering if I should make 2 versions where the strain guage is on either side so that I could actually just slide Finger5 forwards instead of the tightly-packed Fingers2-4 backwards.
Multiple Tetrinsic's together also looks pretty good actually. It looks more store-bought than I was expecting. I'm wondering if I should make 2 versions where the strain guage is on either side so that I could actually just slide Finger5 forwards instead of the tightly-packed Fingers2-4 backwards.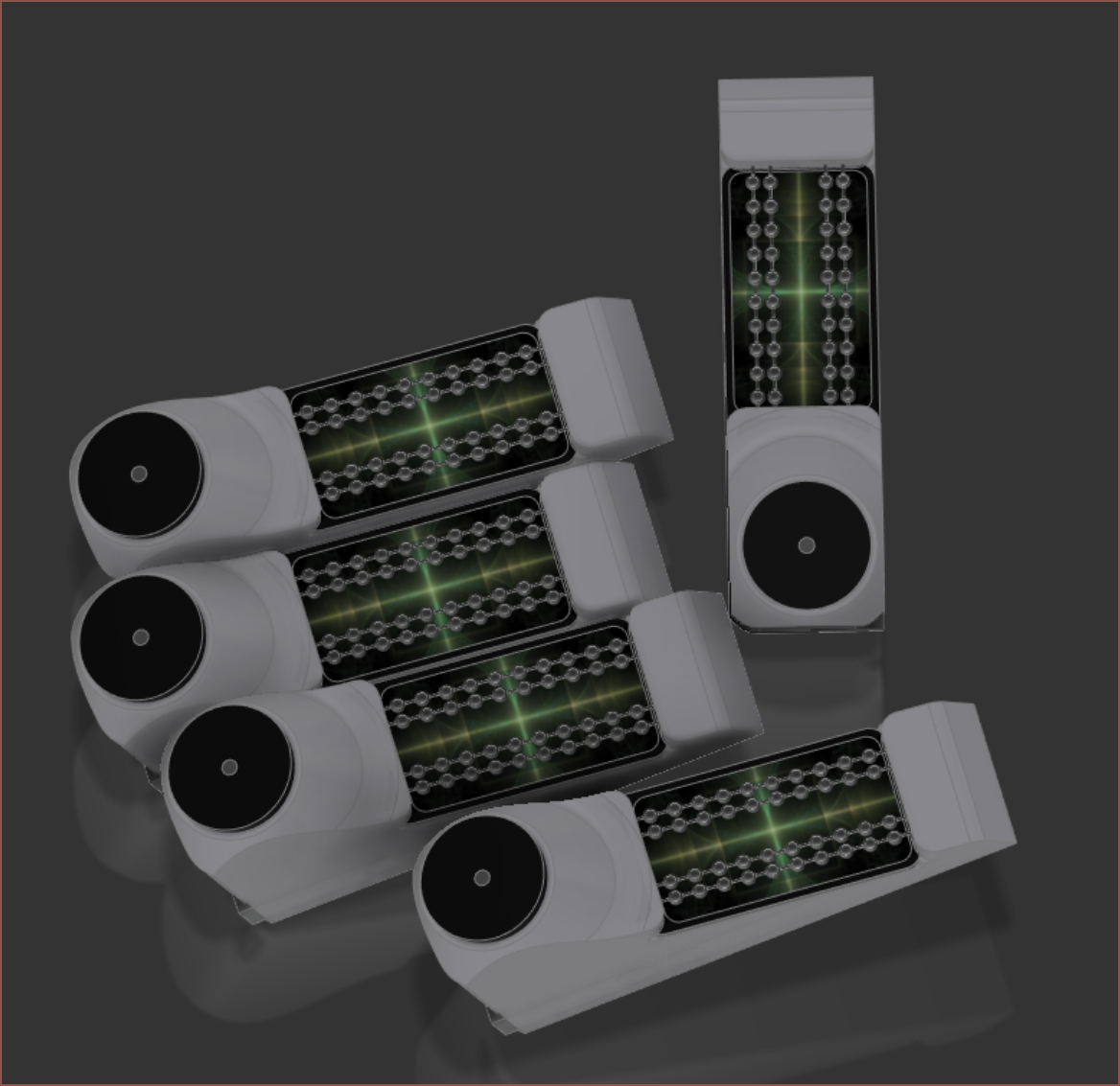 Oh wow I could actually do that without an intersection? Shame I can't find anywhere to put a 5th Tetrinsic. Well... I could put it along with the others but I don't know if my hands or pockets would accomodate 100-110mm and I don't know of Tetrinsic could accomodate some swivelling. It's probably possible but likely requires the knowledge of whoever makes those Autobot Transformer toys. If that was the case, the TimerSpy could be symmetrical like what I was doing in
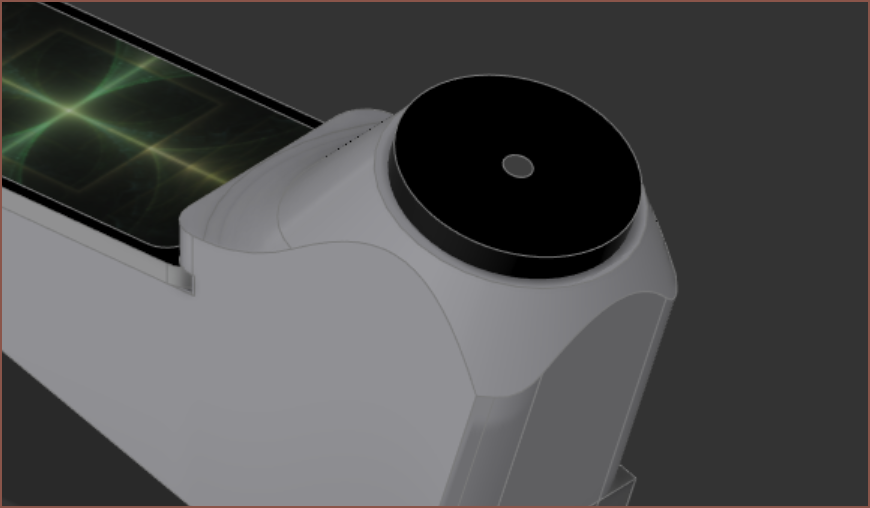
Oh wow I could actually do that without an intersection? Shame I can't find anywhere to put a 5th Tetrinsic. Well... I could put it along with the others but I don't know if my hands or pockets would accomodate 100-110mm and I don't know of Tetrinsic could accomodate some swivelling. It's probably possible but likely requires the knowledge of whoever makes those Autobot Transformer toys. If that was the case, the TimerSpy could be symmetrical like what I was doing in 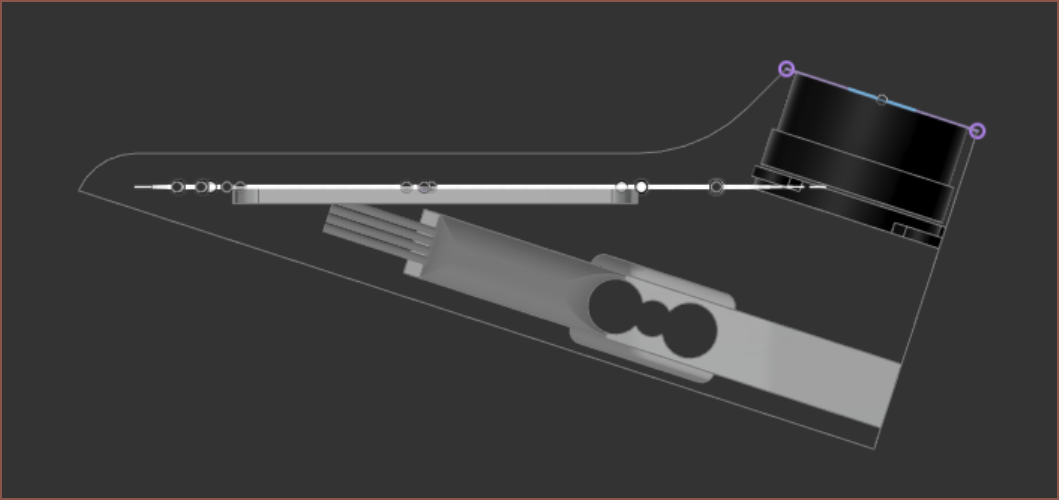 I have a cool idea which is to have the top cover kind of just curve around the top of the motor which just so happens to look and feel premium enough to keep it uncovered. (Perhaps, if someone is so inclined, this Tetrinsic could be used both as a slider and knob.) I'm visualising something similar to those "black-background car side" pics. I'm also thinking of mounting the motor using a grub screw; if those things can hold an FFF 3D printer extruder gear in place, it should be able to hold the motor in a fixed position. If successful, that would further cut down on the amount of additional tools needed to manufacture this.
I have a cool idea which is to have the top cover kind of just curve around the top of the motor which just so happens to look and feel premium enough to keep it uncovered. (Perhaps, if someone is so inclined, this Tetrinsic could be used both as a slider and knob.) I'm visualising something similar to those "black-background car side" pics. I'm also thinking of mounting the motor using a grub screw; if those things can hold an FFF 3D printer extruder gear in place, it should be able to hold the motor in a fixed position. If successful, that would further cut down on the amount of additional tools needed to manufacture this.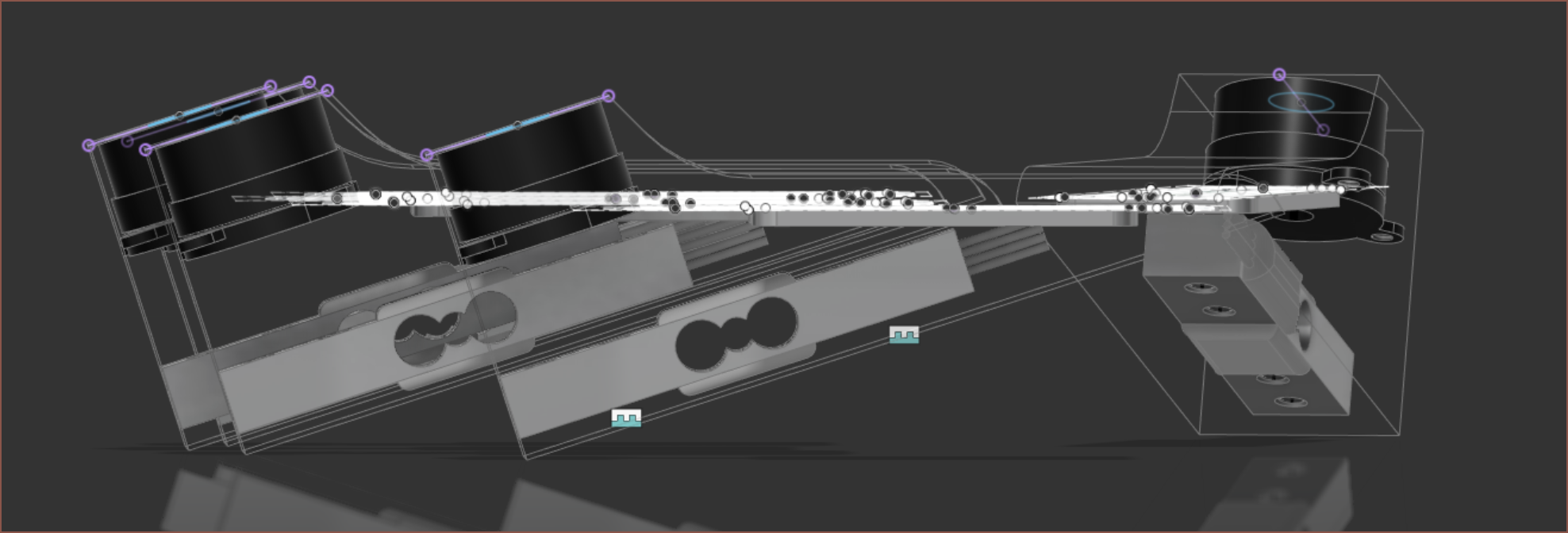 I don't think I'm going to be able to get a solution that has Thumb1. That's ok though, as I still consider a 4-finger Tetent a fully featured one. Additionally, I'm thinking of having the Tetrinsics slide out (using the help of springs) so that TimerSpy is compact enough to fit on the back of the hand. This means that the fingers have slightly different elevations, and Finger5 is much higher than the rest.
I don't think I'm going to be able to get a solution that has Thumb1. That's ok though, as I still consider a 4-finger Tetent a fully featured one. Additionally, I'm thinking of having the Tetrinsics slide out (using the help of springs) so that TimerSpy is compact enough to fit on the back of the hand. This means that the fingers have slightly different elevations, and Finger5 is much higher than the rest. 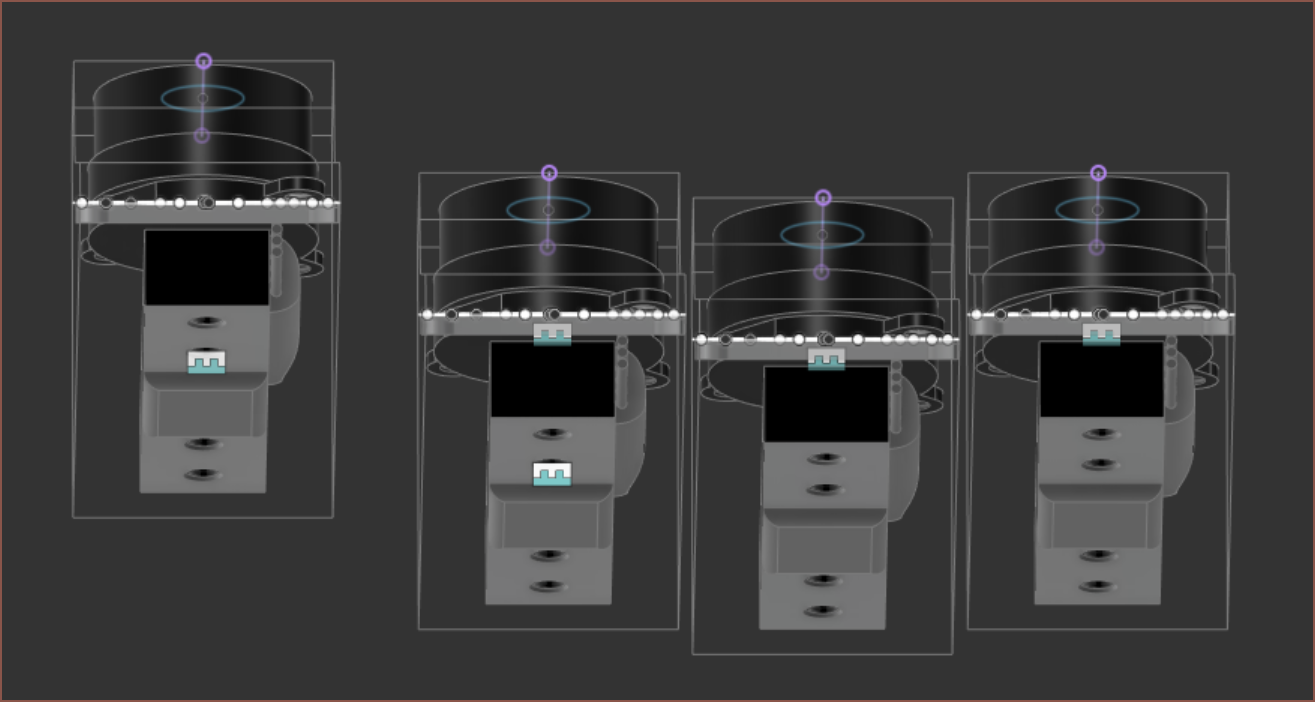
 The height difference between Finger5 and 4 is only 8mm though, It looked way larger and I tested maybe a 20mm difference..
The height difference between Finger5 and 4 is only 8mm though, It looked way larger and I tested maybe a 20mm difference..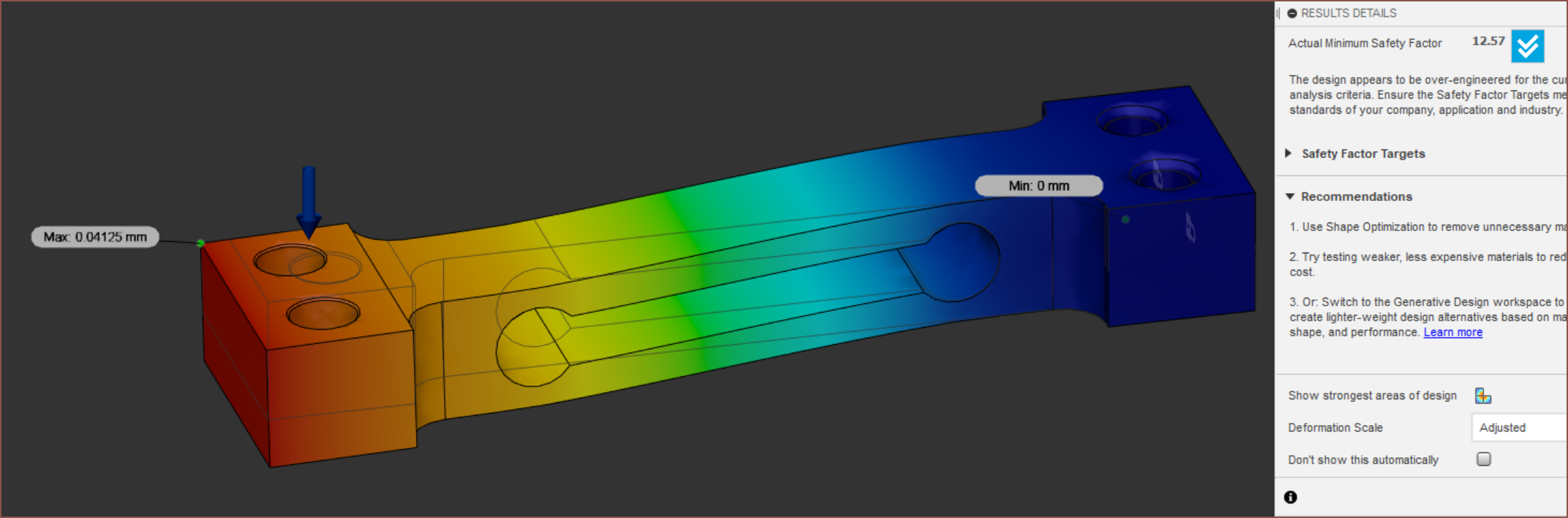
 Way overbuilt, but the other version of this cell is rated for 300g, which is not enough. Additionally, I have to consider the forces exerted on the mounting points, and the mounting method on this is much more likely to be rigid. Lastly, all holes are tapped on this cell, which isn't the case for the 500g cell.
Way overbuilt, but the other version of this cell is rated for 300g, which is not enough. Additionally, I have to consider the forces exerted on the mounting points, and the mounting method on this is much more likely to be rigid. Lastly, all holes are tapped on this cell, which isn't the case for the 500g cell.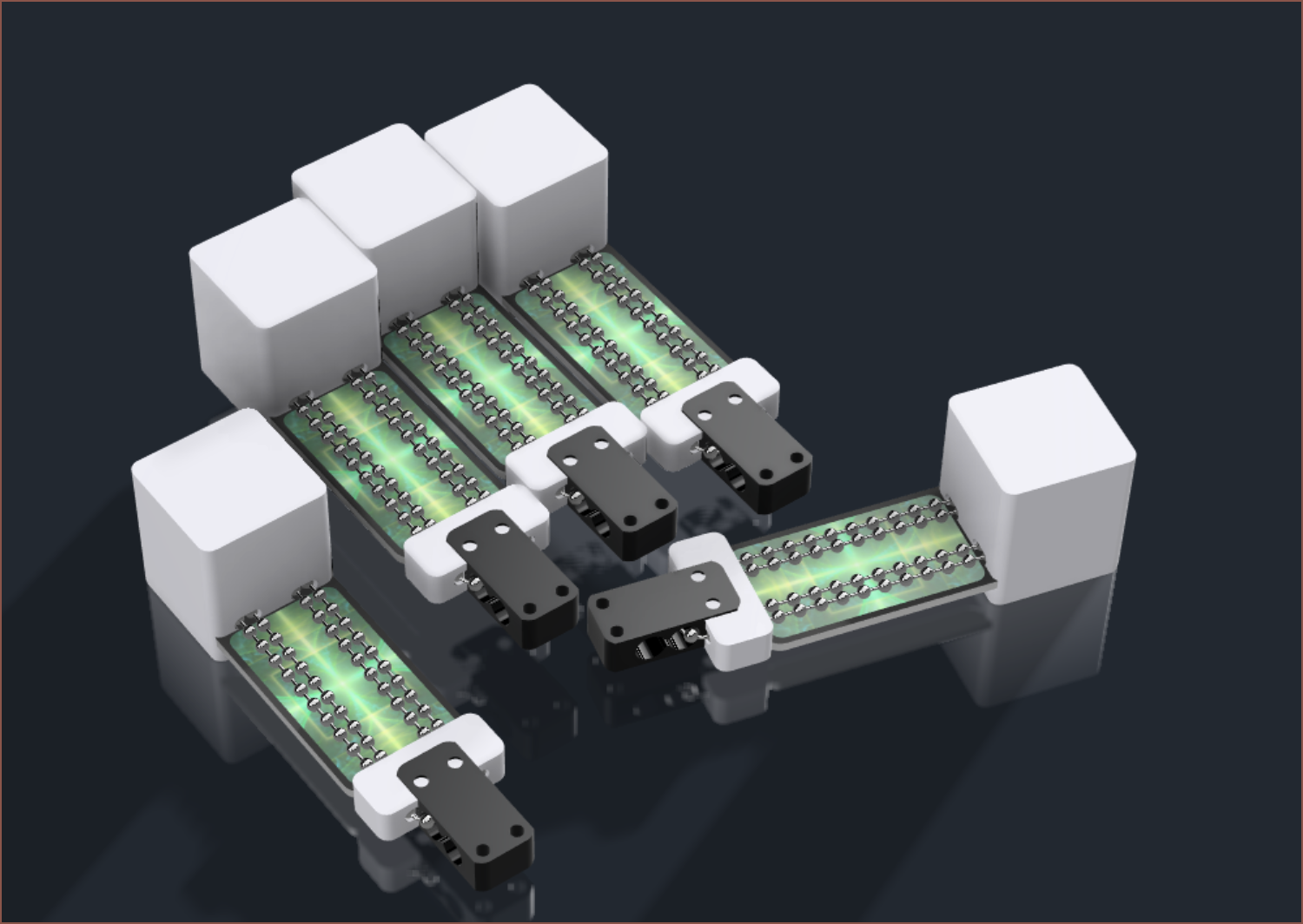 Now that there is a potential TimerSpy layout where Finger2 doesn't intersect Thumb1 as incorrectly predicted, it seems possible to use bolts under the LCD for rigidity. I'm already expecting that the PCB needs to go that low, and potential designs should still be relatively thin and pocketable. I think as long as I'm under 10mm for the height nearest to the knuckes, the solution should pass.
Now that there is a potential TimerSpy layout where Finger2 doesn't intersect Thumb1 as incorrectly predicted, it seems possible to use bolts under the LCD for rigidity. I'm already expecting that the PCB needs to go that low, and potential designs should still be relatively thin and pocketable. I think as long as I'm under 10mm for the height nearest to the knuckes, the solution should pass. 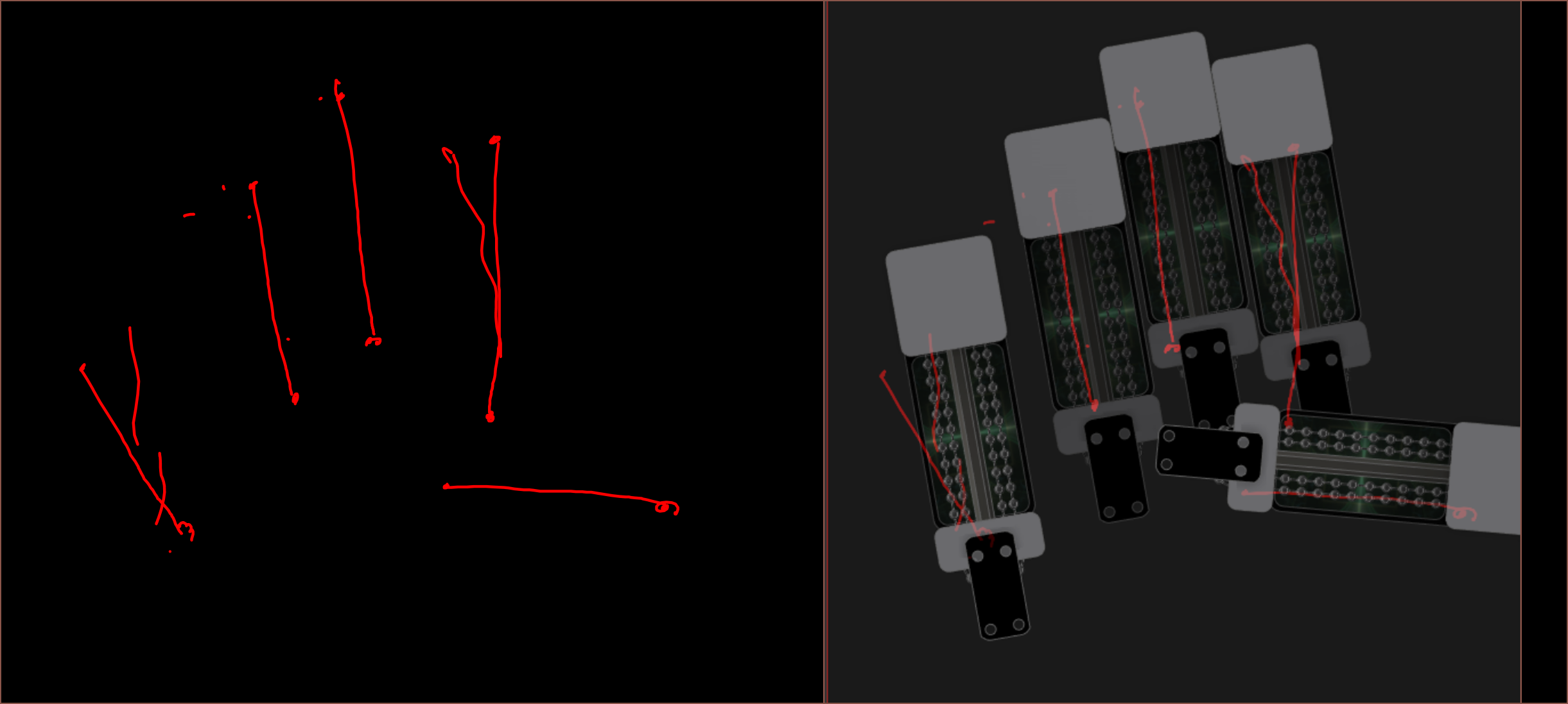 The assumed plan was for Finger2-4 to be 6mm lower than 1/5, but I've just tried it (by using my other hand as a spacer) that the inverse feels much less constricted.
The assumed plan was for Finger2-4 to be 6mm lower than 1/5, but I've just tried it (by using my other hand as a spacer) that the inverse feels much less constricted.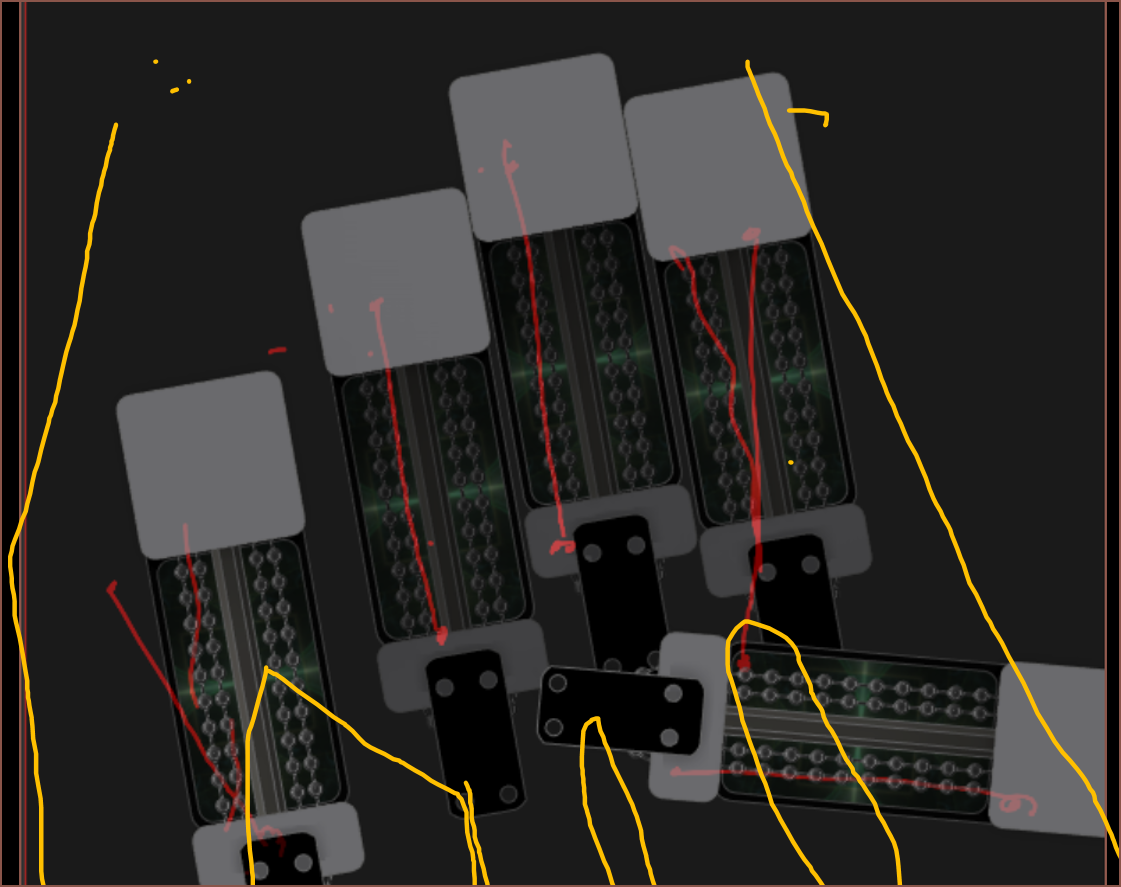
 I'm just going to have to hope I get used to it and that the spacer does its second function of allowing the chain to "lean" on it.
I'm just going to have to hope I get used to it and that the spacer does its second function of allowing the chain to "lean" on it.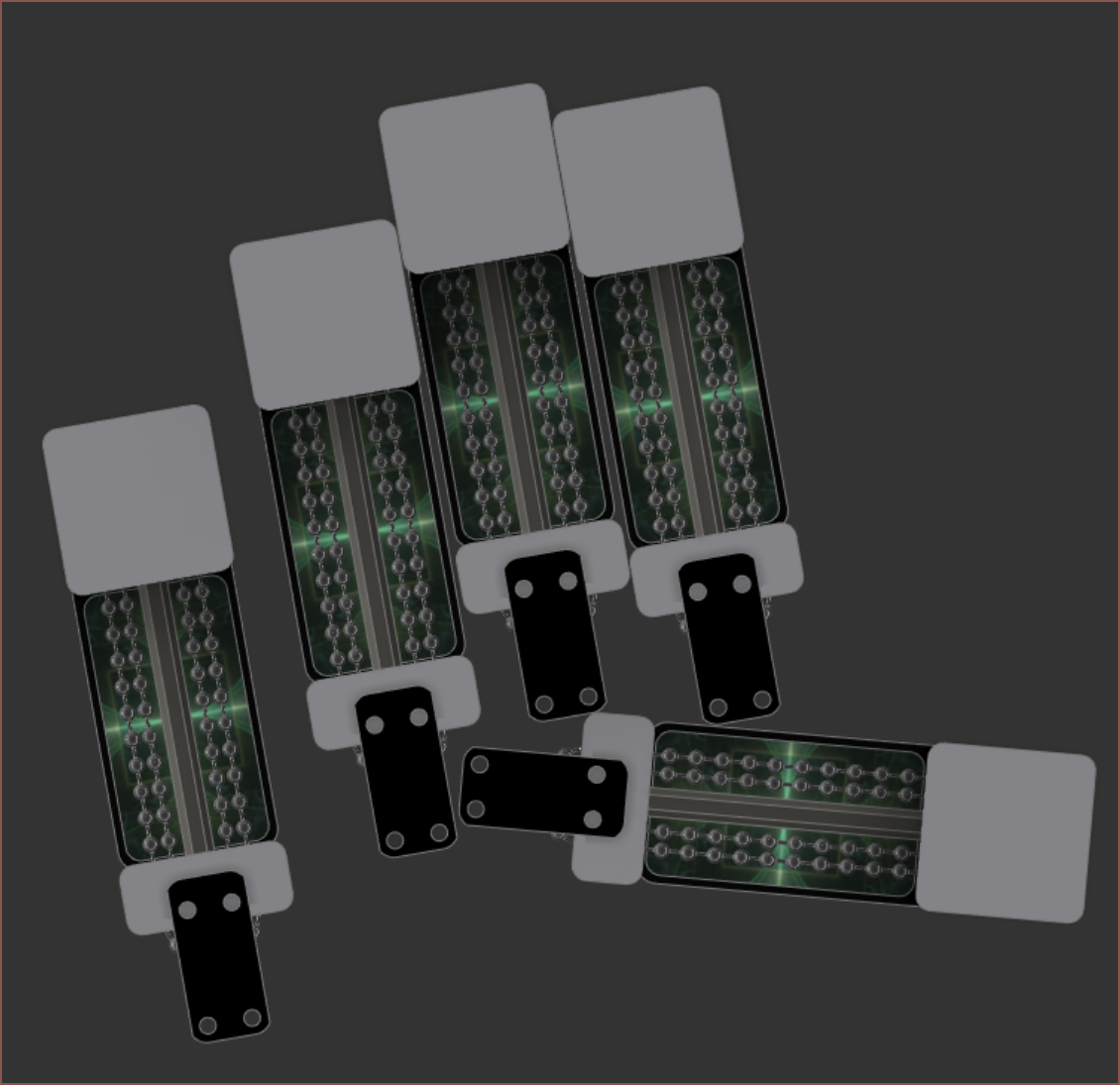 And this is starting to look kinda cool actually, like robotic hands:
And this is starting to look kinda cool actually, like robotic hands: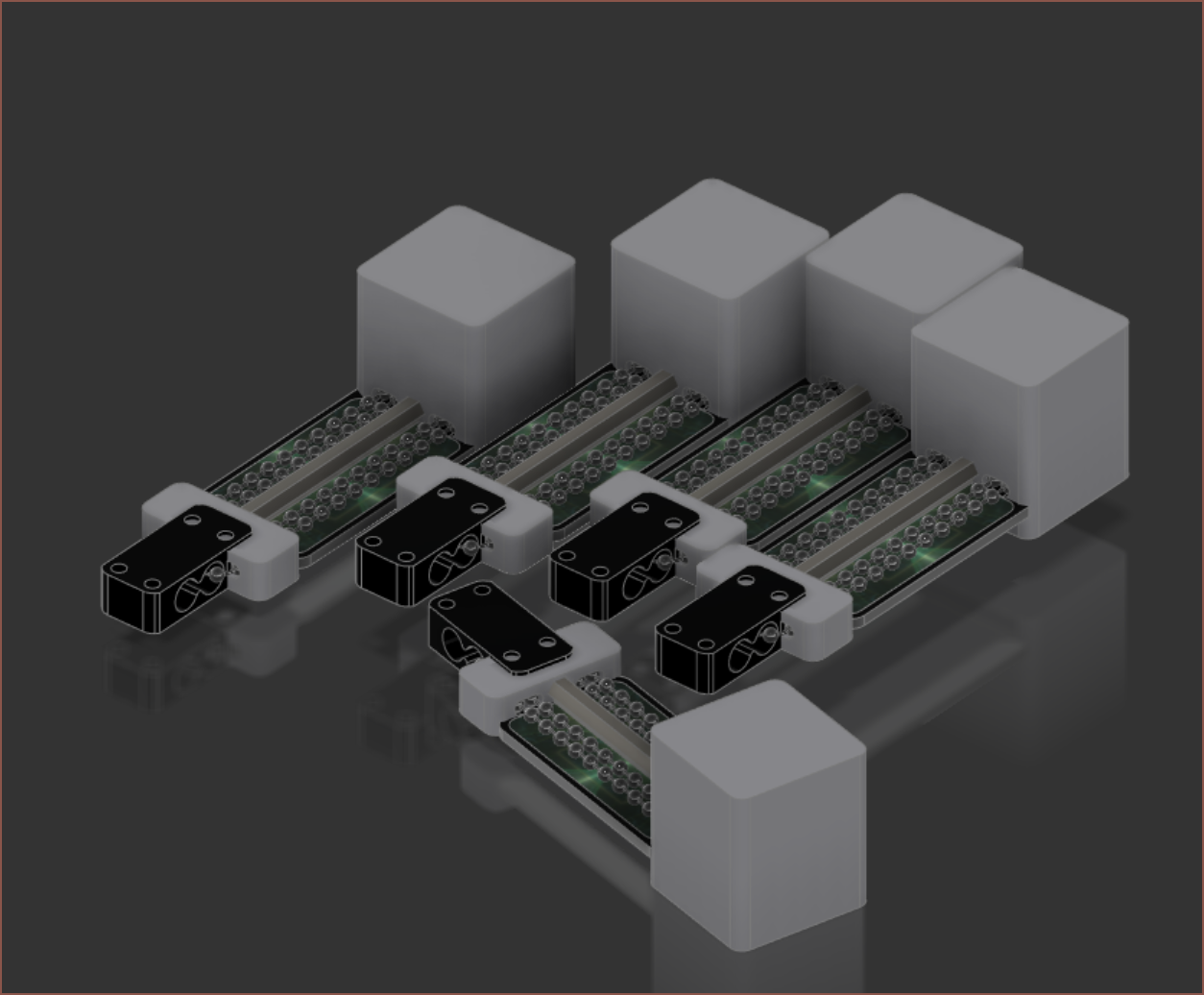 Brass' natural colour does seem to break the vibe a bit though.
Brass' natural colour does seem to break the vibe a bit though.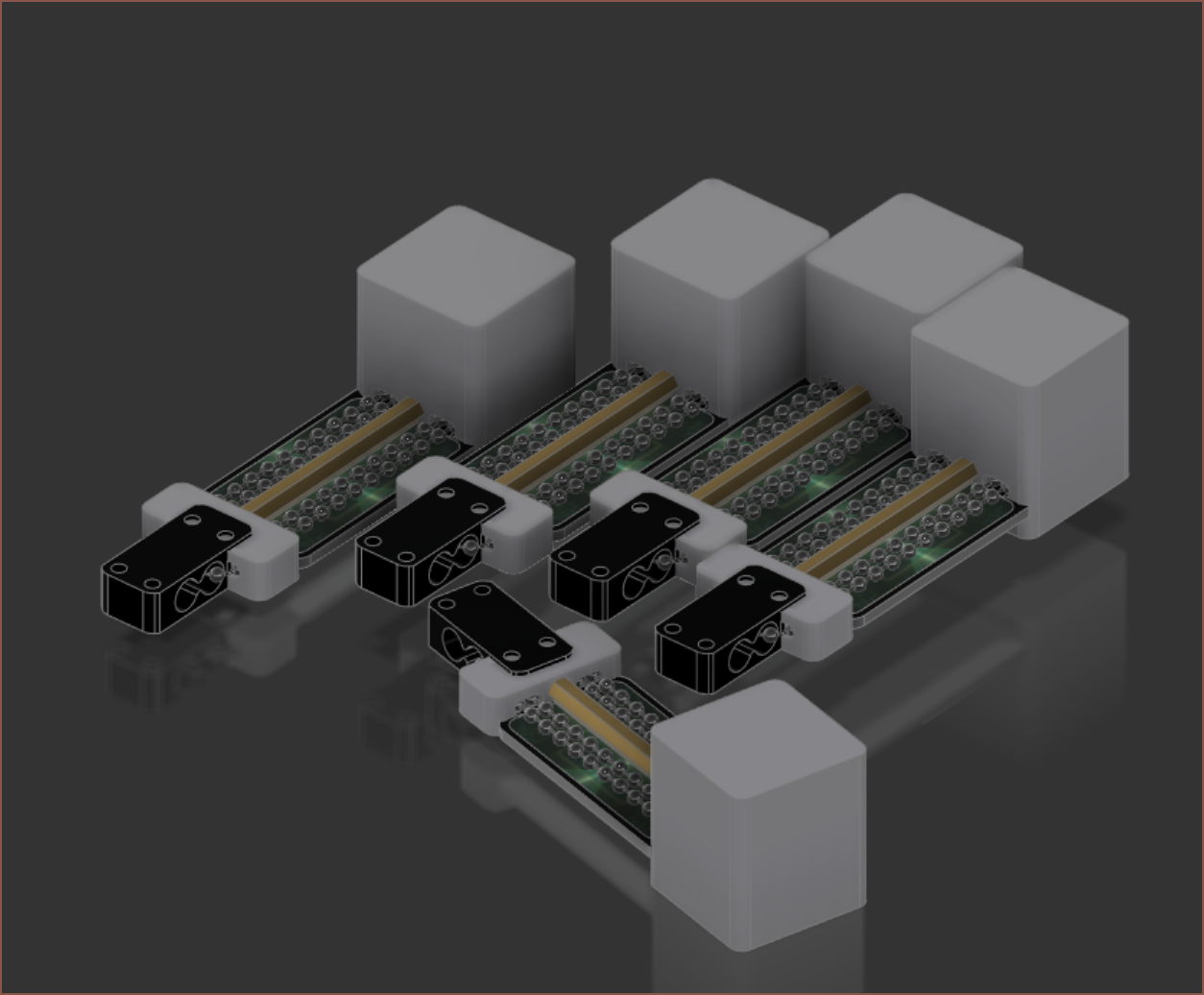


 Maybe it's because of the motor block that it just looks off-balance? The nice thing though is that I wouldn't have to cut off any tabs with this design.
Maybe it's because of the motor block that it just looks off-balance? The nice thing though is that I wouldn't have to cut off any tabs with this design.
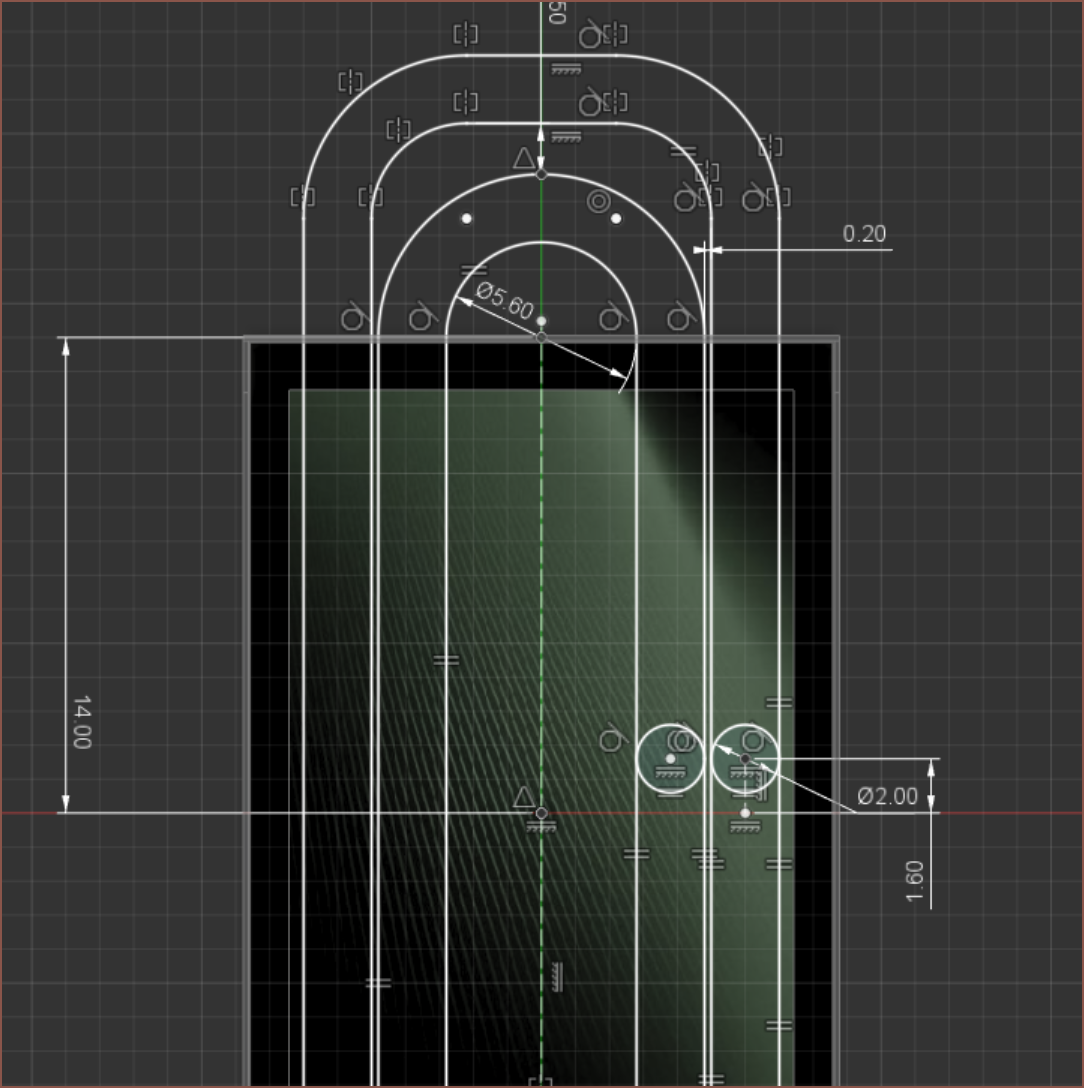
 The brass spacer took up less visual area of the screen than I feared. Also, the white blocks are actually wider than the larger screen I found anyway, so I might as well use it.
The brass spacer took up less visual area of the screen than I feared. Also, the white blocks are actually wider than the larger screen I found anyway, so I might as well use it.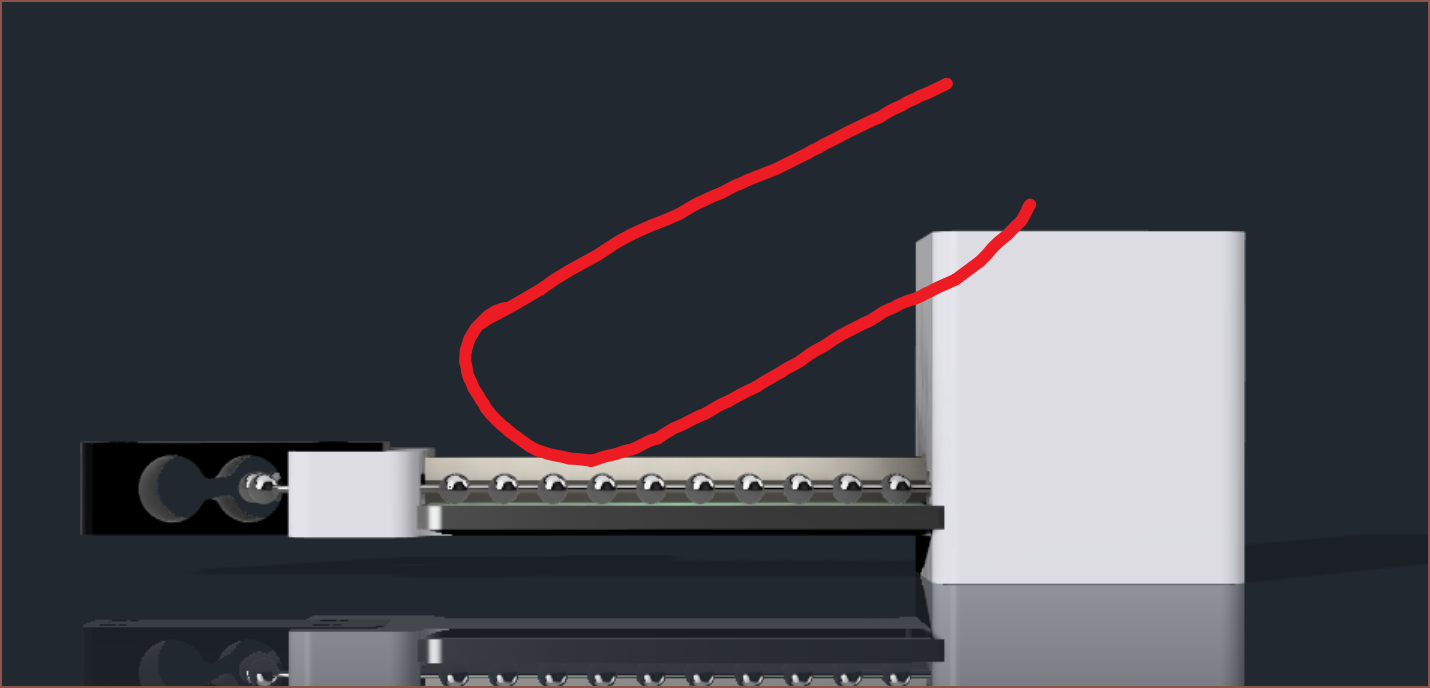 The minimum thickness is about 6mm as expected.
The minimum thickness is about 6mm as expected.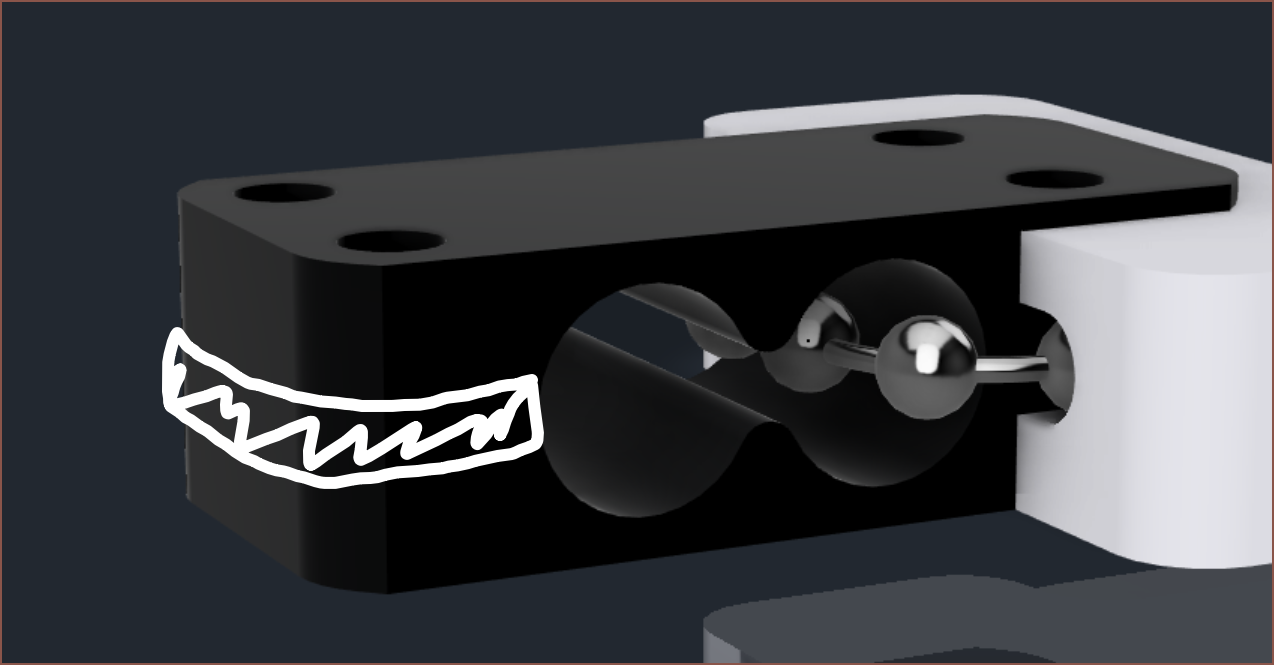
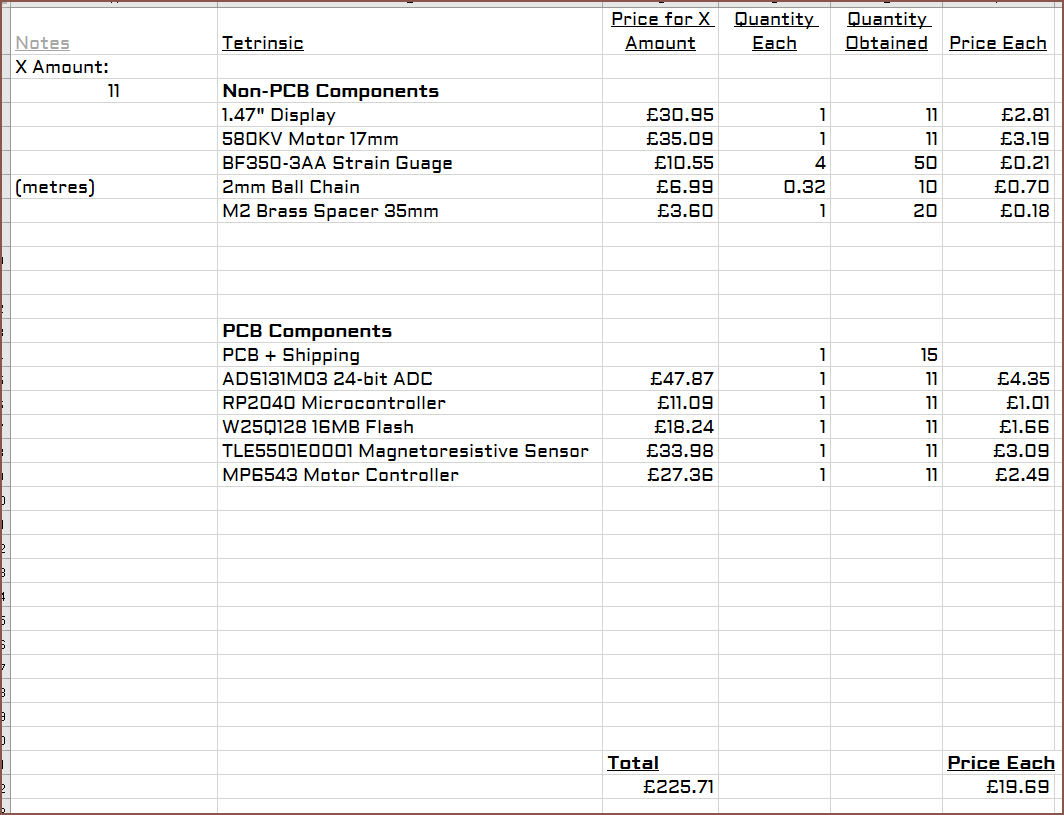 It's interesting to see that the BOM so far is very close to the £20 figure I had in my head. I'm thinking of getting 11 just so that I have spare components should I break something in testing.
It's interesting to see that the BOM so far is very close to the £20 figure I had in my head. I'm thinking of getting 11 just so that I have spare components should I break something in testing.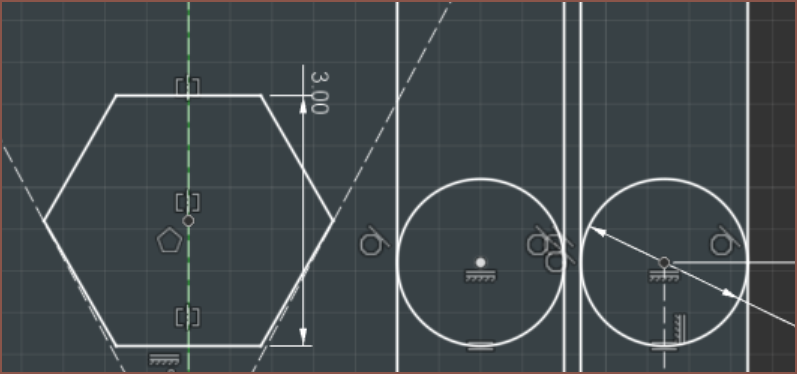 An aluminium one is 4mm and stainless steel is 4.7.
An aluminium one is 4mm and stainless steel is 4.7.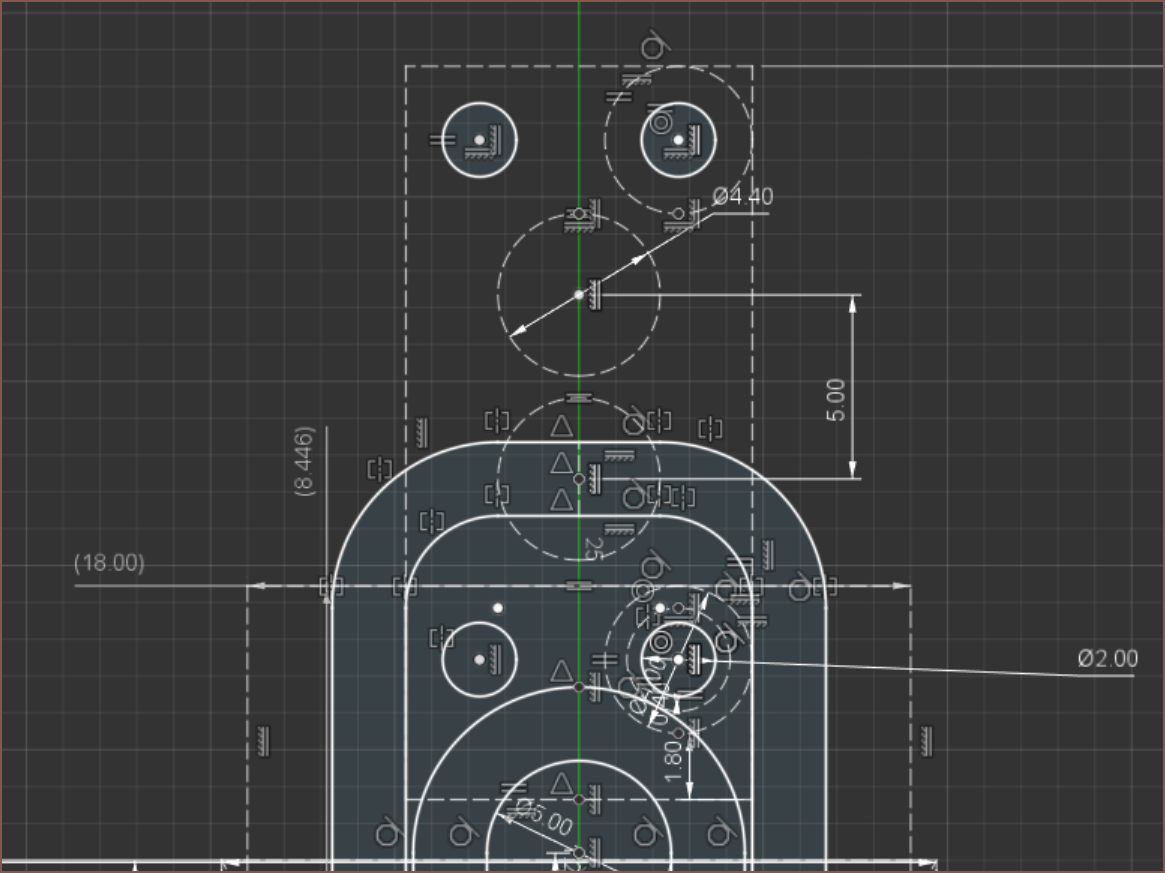
 [22:30]I've gotten this far, and I'm already thinking that the thing has to be mounted upside down so that the fingers don't intersect the motor block (opposide end of LCD).
[22:30]I've gotten this far, and I'm already thinking that the thing has to be mounted upside down so that the fingers don't intersect the motor block (opposide end of LCD).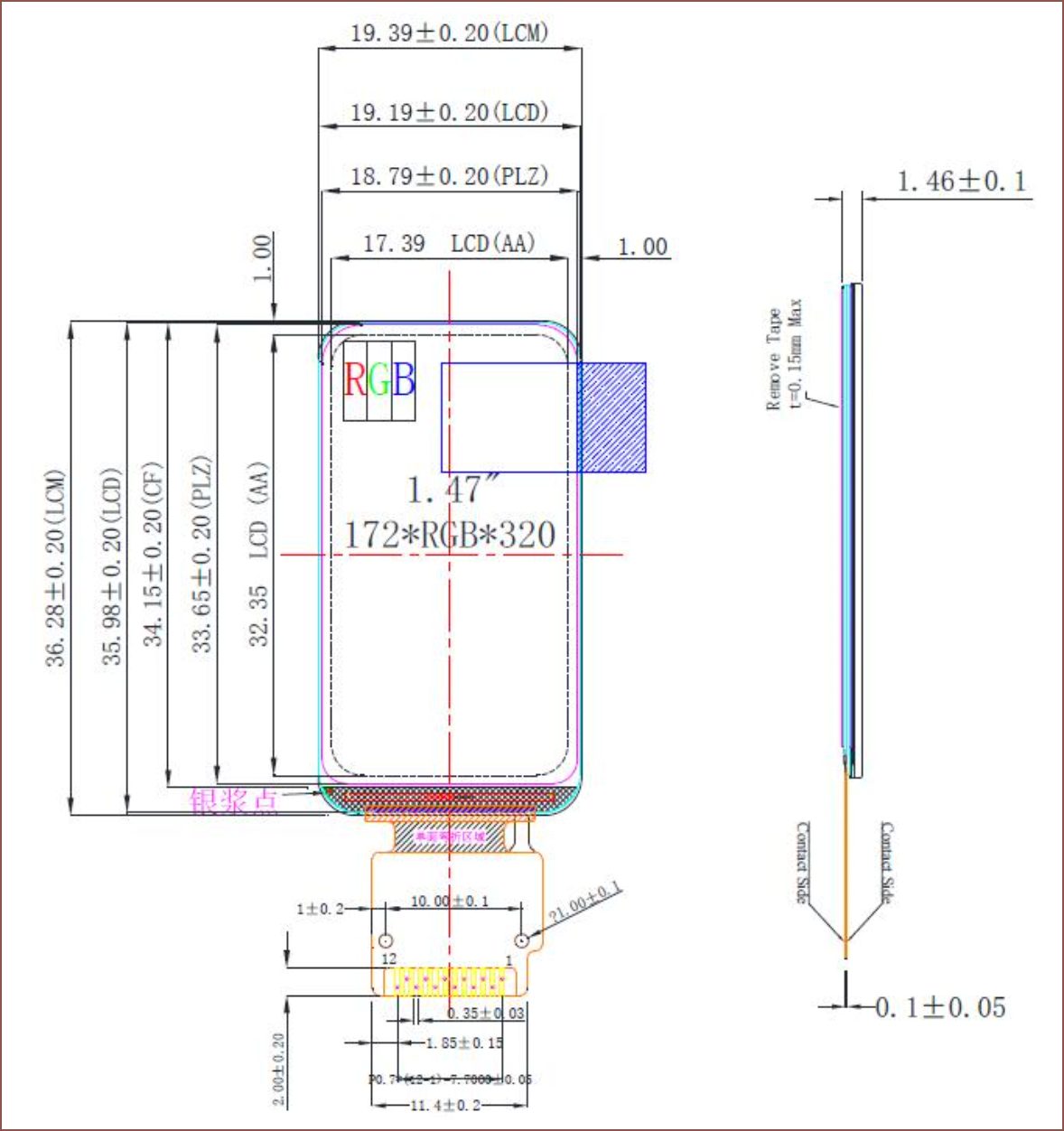 The increase from 24->32mm could be beneficial from an ergonomics and usability perspective too. Other than the £7 BOM increase, I'm not seeing many drawbacks, and the benefits are a longer active area, a more bezel-less looking screen (the chin is smaller too) and a higher screen to ball-chain ratio. I also wouldn't be suprised if the colours look better on this panel either, since it just overall seems like a more modern one. Oh, and it might look even better if the Tetrinsics are layered, allowing for animations that span across multiple elevations. Other customers also seem to like the slightly larger, rounded edge screens:
The increase from 24->32mm could be beneficial from an ergonomics and usability perspective too. Other than the £7 BOM increase, I'm not seeing many drawbacks, and the benefits are a longer active area, a more bezel-less looking screen (the chin is smaller too) and a higher screen to ball-chain ratio. I also wouldn't be suprised if the colours look better on this panel either, since it just overall seems like a more modern one. Oh, and it might look even better if the Tetrinsics are layered, allowing for animations that span across multiple elevations. Other customers also seem to like the slightly larger, rounded edge screens:
 So this was the idea I had in mind before I determined that the motor needed to be on the side away from the palm. It doesn't look like i'd have the space for a load cell body anyway, and the side m3's I was about to add just made the top box too wide. Since the small top box would be in the position where the Tetrinsics are the closest, it should be as small and thin as possible.
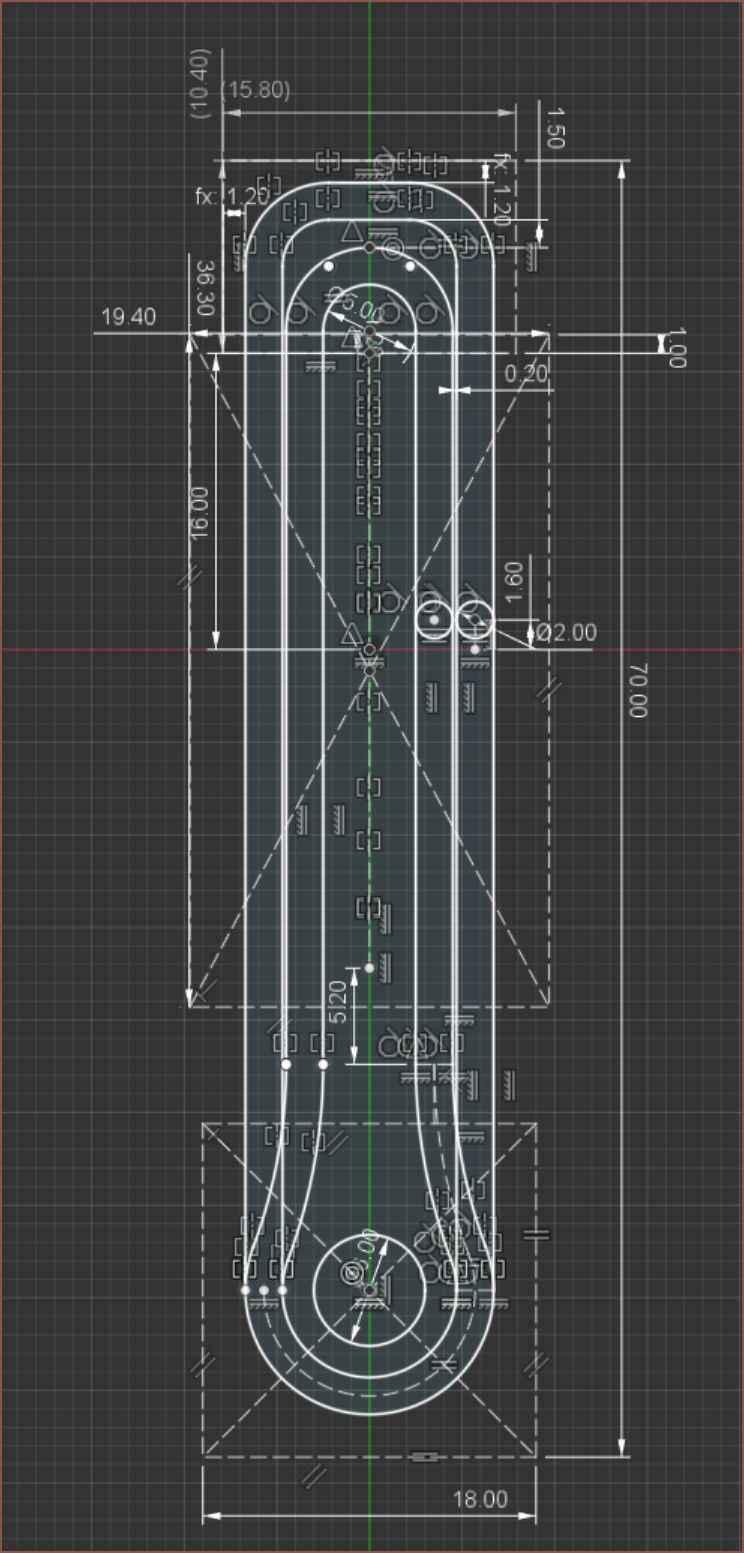
So this was the idea I had in mind before I determined that the motor needed to be on the side away from the palm. It doesn't look like i'd have the space for a load cell body anyway, and the side m3's I was about to add just made the top box too wide. Since the small top box would be in the position where the Tetrinsics are the closest, it should be as small and thin as possible.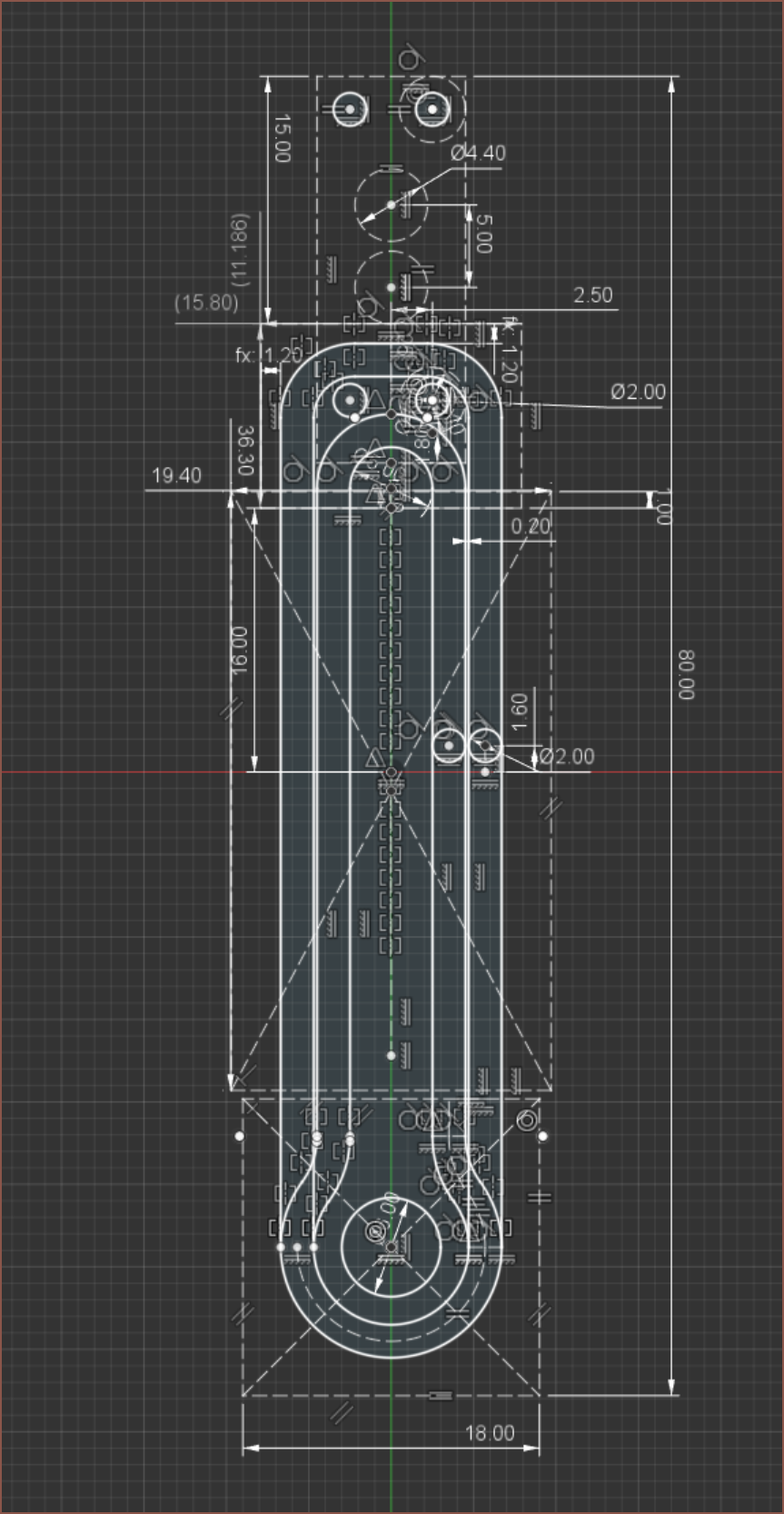 Ok. I've already hit the max allowable total length but this might work. Those 4.4mm circles at the top represent the ends of the cutout for the load cell geometry. The main issue I can see right now is where the load cell connects to the small block. Right now I'm imagining a shape like this:
Ok. I've already hit the max allowable total length but this might work. Those 4.4mm circles at the top represent the ends of the cutout for the load cell geometry. The main issue I can see right now is where the load cell connects to the small block. Right now I'm imagining a shape like this: