-
Project Log 60: DIY Electric Motor³.
07/10/2023 at 11:53 • 0 commentsMonday, 10/07/2023, 08:52.
Well, sh1t.
Just now I remembered that there is a reaction between iron oxide (rust) and hydrogen gas:
I can use this reaction to make pure iron powder in any grain size I want. In fact, there are tons of tutorials on how to get iron oxide.
Well, this can either be used for the fuel cell or the electric motor.
I asked ChatGPT and it said it could be done with nickel, but I would need to corrode it with muriatic acid (HCL) and hydrogen peroxide (oxygenated water) and then expose it to hydrogen.
But as far this would actually work is questionable, it is not like ChatGPT is a chemist...
-------------------------------------------------------------------------------------------
... Which means I just wasted money with that graphite powder and nickel plate for electroplating, huh...
-------------------------------------------------------------------------------------------
And I think this video shows a few nice insights on the subject of DIY electric motors:
Well, as you can see in the second video, the soft magnetic core that the guy made was half as good as the basic ferrite core he could find.
Unfortunately, I don't have the fancy tools he has for measuring the specifics of each part, so I would be going in the dark.
Meaning that I have to go absolutely right in the first try.-------------------------------------------------------------------------------------------
Also, I asked to chatGPT some materials with higher resistance that could be used:
"The specific resistivity or resistance value of insulating materials can vary depending on factors such as composition, temperature, and specific grade or formulation of the material. Here are some approximate resistivity values for certain insulating materials, expressed in kiloohms per meter (kΩ·m):
Polyethylene (PE): The resistivity of polyethylene can vary depending on its type and grade. Generally, it ranges from approximately 10^14 to 10^17 kΩ·m.
Polyvinyl Chloride (PVC): The resistivity of PVC typically ranges from around 10^12 to 10^15 kΩ·m.
Cross-Linked Polyethylene (XLPE): XLPE exhibits higher resistivity compared to regular polyethylene. Its resistivity is typically in the range of 10^15 to 10^18 kΩ·m.
Polypropylene (PP): The resistivity of polypropylene is similar to that of polyethylene and can range from approximately 10^14 to 10^17 kΩ·m.
Polytetrafluoroethylene (PTFE): PTFE is known for its exceptional electrical insulation properties. It has a resistivity in the range of approximately 10^18 to 10^21 kΩ·m.
Epoxy Resins: The resistivity of epoxy resins can vary depending on the specific formulation and curing conditions. Typically, it ranges from around 10^12 to 10^15 kΩ·m.
Ceramic Materials: The resistivity of ceramic materials can vary significantly depending on the specific type of ceramic and its composition. Resistivity values for ceramics can range from around 10^9 to 10^15 kΩ·m.
It's important to note that these values are approximate and represent a general range. The actual resistivity of a particular insulating material can vary based on various factors, including temperature, impurities, and manufacturing processes. Additionally, the resistivity is often given in a wide range to account for variations in material properties and applications."
-------------------------------------------------------------------------------------------
Now I get why the scientific articles were so focused on using sintering on their soft magnetic composite cores... So all the binder material is burned and extracted from the piece, leaving only the metal structure (that is what sintering is).
I was so focused on what materials I could/should use that I never thought on the concentration of materials that I should use...
-------------------------------------------------------------------------------------------
By the way, the question is: how the duck I can use the polymer as a binder of the material since every little thing I just talked about is super viscous and super hard to deal with?
Well, I was kinda thinking in a solution for that before I even realized I needed one.
Basically, since plastic extrusion machines are expensive for the mold casting of the mech/exosuit, I was thinking on using a manual metal pump to forcefully extrude the viscous plastic into the pressure-held molds.
It would like using an hydraulic jack, but spicy. And harder.Again, I asked chatGPT:
"In a DIY sintering setup, there are several materials you can use as binders to hold the material powder in place during the sintering process. The choice of binder depends on various factors such as the type of material being sintered, the desired final properties, and the temperature and conditions of the sintering process.
Here are a few commonly used binder materials for sintering in a DIY setup:
Organic binders: Organic binders are a popular choice because they can be easily burned out during the sintering process. Some examples of organic binders include starch, cellulose, polyvinyl alcohol (PVA), and various waxes. These binders can provide good green strength and can be removed by heating the material to a temperature where they decompose or burn off.
Inorganic binders: Inorganic binders are another option for sintering. They are often used for materials that require higher sintering temperatures. Examples of inorganic binders include colloidal silica, sodium silicate, and various glasses. These binders can provide good strength and stability during the sintering process.
Water: Water can also be used as a temporary binder for certain materials. It acts as a binding agent by creating a slurry with the powder. Once the desired shape is formed, the water can be allowed to evaporate, leaving the powder compacted. However, this method may not be suitable for all materials and may require careful drying to avoid cracking.
It's important to note that the choice of binder depends on the specific requirements of your DIY sintering setup and the materials you are working with. It's recommended to consult material-specific resources, such as technical data sheets or research papers, to determine the most suitable binder for your particular application. Additionally, it's crucial to follow proper safety precautions and guidelines when working with binders and during the sintering process.
Besides water, there are other liquid binders that can be used in the sintering process. Some common alternatives to water include:
Organic solvents: Organic solvents like acetone, ethanol, methanol, and isopropanol can be used as binders for certain materials. These solvents can dissolve or disperse organic binders or polymers, allowing them to act as temporary binders for the powder. The solvent can be evaporated later, leaving the powder compacted. It's important to note that some solvents are flammable and require proper handling and ventilation.
Organic binders in solvent form: Instead of using a dry organic binder, you can dissolve or suspend an organic binder such as PVA (polyvinyl alcohol) or acrylic-based binders in a suitable solvent. This creates a binder solution that can be applied to the powder, allowing it to hold its shape. The solvent can then be evaporated to leave the binder behind.
Aqueous binders: Besides water, there are specific aqueous binders available for different applications. These binders are typically designed to be water-based and can provide good binding properties. Examples include water-based polymer dispersions and emulsions.
When selecting a binder, it's important to consider its compatibility with the material being sintered, the sintering conditions, and the desired properties of the final product. Some binders may have specific temperature requirements for their removal, and others may leave residues that can affect the properties of the sintered part.
It's recommended to refer to material-specific resources, such as technical data sheets or research papers, or consult experts in the field for guidance on selecting the most appropriate binder for your specific application."
-------------------------------------------------------------------------------------------
I think it would be interesting to mix acetone and sodium silicate (assuming sodium silicate solidifies even without the presence of water) to use as the binder for a DIY sintering process.
-------------------------------------------------------------------------------------------
Even though I trash-talk ChatGPT most of the time, I don't think I would have half the information I learned without this thing.
Today I'm in a good mood... For the last 20 minutes... It is 1 am.
No, I wasn't researching until 1 am. I just had an eureka moment and I'm studying at 1 am because I like to learn new things.
Holy crap, I'm such a nerd...
-------------------------------------------------------------------------------------------
Ok, I'm awoke now and I rethought on some stuff.
The polyethylene mold injection method may not work, but the DIY sintering thingie may have something useful.
Basically, I was thinking on mixing insulation material and iron powder mixed with acetone in different materials, so I would just spray layers of each one in a sequence, creating some kind of lamination without the need of actual laminations.
So, the steps would be:
Make a mold and a pressure mold, spray iron powder suspended in acetone until it makes a layer on the mold, wait for the acetone to evaporate, apply insulation layer, wait if to evaporate, apply pressure using the pressure mold. Rince and repeat.The thing is that you still need to apply resin on the outside, since everything would just be held together by pressure alone. You could also apply a spray of sodium silicate in acetone after every layer.
PS: I just now found out that there are electric insulation pastes, so all this tedious process may be skipped by simply mixing the iron powder and the paste, lol.
I was also thinking on using that teflon tape used on water pipes, but I don't know how well I would be able to actually cut everything to pieces. And yes, teflon powder is kinda expensive.
Well, I could literally use those insulation tapes used for electronics and so on, but you would need to come up with something to deal with the adesive.
ChatGPT suggested acetone and/or isopropyl alcohol.Bruh, I will be using so much fricking acetone/alcohol that I will probably turn this project in a fire harzard.
-
Project Log 59: DIY Electric Motor² (and other stuff).
07/08/2023 at 12:45 • 0 commentsSaturday, 08/07/2023, 09:37.
Well, I just woke up and I'm already done with this project log, I will take a few days off and I'm not in the mood...
Edit¹:
Forget everything I said in this project log.
Just now I understood what I was taking 50 newton meters of torque instead of 500 nm.
I'm quite stoopid and bad at math, if you didn't notice it.
I would only achieve 50 nm if I were to use the 10x10cm electric motor with the addition of a gear reduction of 10:1.
I would only achieve 500Nm with a 100:1 (or two 10:1 reduction boxes), which is exactly what I was trying to avoid.
So, the motor's stator would need to be 10 times higher, and thus giving it around 8cm of height with 50 newton meters and 300 rpm by itself and then with a gearbox of 10:1.
Actually... I correctly made the proportions, I just missunderstood the output torque. lol
____________________________________________________________________
Although I was thinking on using 6 of this 27cm wide electric motor on each limb for the mech, I was wondering what should be the size of a small brushless motor with 1500 watts and 50 Nm of torque in order to fit in a exoskeleton capable of lifting 1 ton.
Of course, I wouldn't like to be inside such thing, but if I can find a way of making an even smaller electric motor, it may be beneficial for the mech thingie. After all, I would need way less material for a smaller motor, and thus, less money. >.>
Ironically, I had the idea of using that Eagle power electric motor used by James bruton that I talked so much.
https://grabcad.com/library/x8308s-outrunner-motor-1
![]()
Or maybe this one:
https://grabcad.com/library/t-motor-u8-lite-1![]()
Early I gave up on the idea because I was thinking on using the electric motor without the gear reduction, so I simply multiplied its height until the torque matched with the torque I required (50 Nm), so I would need around 25 or 30 of both aforementioned motors, which would give something with 80cm of length or even 1 meter. Because these motors only have 2 to 4 Nm of torque.
But, of course, it never crossed in my mind that I should use the gear-box instead of a motor by istelf. So it would give 10 times more torque (although I would need to take the 20% loss into consideration).
So, I would need around 3 to 4 times the height of the motor, which would be around 13cm of height and 9-10 cm of diameter. More or less a 10x10 package. Way more compact than the fricking 27cm wide electric motor.
Also, I could even change the AWG of the brushless motor so it doubles or triples the amperage, and thus, the torque.
If I'm not incorrect, the normal motor would need around 49 amps to achieve the 2-3nm of torque, so I would need around 2 wires of 7-8 AWG for the same power and 40 wires to multiply the torque 25 times to 50 Nm and increase the amperage to 1225amps.
Well, dunno about you, but I don't want to come close to a 1225 amps electric motor.If linus tech, with all their knowledge and experience were afraid of doing something with 250 amps, I don't think I'd like to mess with 1225 amps. >.>
Well, the good part is that I don't need to 3D model anything.
---------------------------------------------------------------------------------------
And honestly, just now I noticed that I never actually calculated the amount of metal powder I would need.
I will try to use blender to tell me the volume, then calculate how much it would weight if it was nickel/iron/ferrite powder.
So, this stator alone would have 14497.7245 mm³ (of course, the stator of the eagle power 3D model from grabcad I posted above), which would be 14,497 cubic centimeters, I will round up to 15 because whatever.
Assuming that google is correct and the density of nickel powder is 8.9 g/ml, iron powder is 7.85 g/cc and ferrite is 5.18 g/ml, I would need 133.5 grams of nickel, 117.75 grams of iron and 77.5 grams for ferrite powder.So, since I would make 4 stators for every motor and then need around 30 motors of these in total, I would need 16 kg of nickel 14kg of iron and 9 kg of ferrite.
For some reason I can't really find ferrite powder, only ferride transformer cores.
5 units of a transformer core that weights around 115 grams, so 575 grams, costs around 120 reais (24 dollars), so 9kg would cost around 2160 reais (443 dollars).Pure iron powder, for some reason, I found properly made for magnetic core for 50 reais the kilogram. Which would cost around 700 reais (143 dollars) in total.
For nickel powder, unfortunately, 100 grams of nickel powder costs twice as iron powder. 1kg of nickel wire that I was thinking on using for electroplating costs 600 reais (123 dollars).
Welp, sh*t. I should've thought on this issue sooner.
Even thought I'm using graphite/graphene, I would still need to infuse 16kg of nickel on the graphite/graphene and the same for iron...
... Now I have to think in a solution...
I either switch to sputtering or keep going with silicon steel and iron using muriatic acid (hydrochloric acid) and/or sulfuric acid...
Both are extra hard on their own ways...
---------------------------------------------------------------------------------------
Obviously, this project log won't just end here, I will first try to make the DIY electroplating with graphite/graphene.
First, I need to convert graphite into graphene in a DIY configuration, for that I would need bovine serum albumin and lactoglobulins.
However, I couldn't find it by itself, only egg albumin.
So I thought on simply using milk in powder, which every good brazilian has at least 10kg of packages at their home to drink with coffe every day.Also, I was thinking about the relation of milk in powder with the vinegar salt solution. When these two combine, wacky things happen, so a thick layer of bioplastic will simply form around the thing.
I was thinking on after making the graphene, I would just heat it up to hundreds of degrees so the milk is converted to plain carbon powder.I found one of these rechargeable mixer/shredder thingies, so luckily I won't need to use the mixer in my house. I don't even know how I would clean it after using the graphite powder >.>
(I said "luckily" because I really don't know if it will be fast enough)But this crap needs to recharge, and it takes a while... And it was not worth it, this thing is too slow...
Also, I just now opened my graphite powder that I received on the mail and... I don't know if it is a thing with the camera/photos, but it is gray as hell, not black...
I also don't have deionized water in hand...
Not because I'm too broke or anything like that, it is just because the shipping fee for this stuff is a fricking crime. You have like, a liter of deionized water costing 10 reais (2 dollars), then the shipping fee is like, 50-80 reais (10-16 dollars).
Like, bruh, I will just use destilled water, thank you.Well, my improvised setup is that I put an empty smaller pan inside a bigger pan full of water, the water will evaporate into the lid of the bigger pan and fall into the smaller pan.
The problem is that I've been trying to make this for 2 hours now and no water formed in the fricking smaller pan. I can't believe I'm so bad at DIYing that I can't even make a fricking boiled water bowl.
![]()
... And the light is off.
Great.(it just came back and some electronics in my house are broken, bruh²).
__________________________________________________________________________________________________________________________________________
Well, bruh³, I completly forgor to take into consideration²³³²³²² the hydrogen storage, it is a problem for a good reason.
"Under ambient conditions, a cubic metre of hydrogen provides some 3 kWh, equivalent to 0.003 kWh per litre. Pressurised hydrogen contains about 0.5 kWh/litre at 200 bar, 1.1 kWh/litre at 500 bar and 1.4 kWh/litre at 700 bar."
Source. https://www.idealhy.eu/index.php?page=lh2_outline#:~:text=Under%20ambient%20conditions%2C%20a%20cubic,kWh%2Flitre%20at%20700%20bar.In other words, even if I had 100% efficiency of energy extraction out of hydrogen, and used only 18 kilowat hours for the mech/exosuit, I would still need a 180 liter hydrogen tank with 500 bar of pressure to work for 10 hours.
But since I will have around 30% efficiency, I would only extract the equivalent of 54 liters out of 180, which means that I would need around 3 to 4 times more hydrogen in order to achieve the 10 hour mark.
I would need a 540 liter tank of hydrogen.![]()
This one hydrogen tank has 850 liters of capacity at 600 bar.
I would either need hydrogen hydride tanks or a conventional combustion generator.
Again, I would suggest to use Digital TG4000I Toyama generator, it weights only 30kg and it delivers 4.4 kilowatt hour. But it costs 3000 reais (616 dollars).
Initially I choose hydrogen fuel cells because you can extract hydrogen from anywhere and on top of that, you can make the hydrogen fuel cells by yourself.
I just forgot a very important detail: you absolutely cannot make the hydrogen tanks by yourself.
Seriously, I don't want to risk my life just to make a hydrogen tank for a big toy.
I've seen DIY videos teaching how to convert fire extinguisher tanks to scuba tanks and whatsoever, but you still are limited to its original pressure rating, which is around 20 bars (2 MPa).
The other way would be hydrogen hydrides, but these are equally as dangerous, since you have to heat the hydride that holds the hydrogen to hundreds of degrees.
And yes, they are twice as expensive as conventional hydrogen tanks.
__________________________________________________________________________________________________________________________________________
However I could make conventional combustion engines in a somewhat DIY manner using 3D printing and I could make an electric generator in a DIY manner.
However, I will have to make a few researches on the subject and see how I would pull that off in a practical manner.I think I would have to use ceramic polymer composites (such as teflon/kapton that can withstand up to 300ºC or more) and/or sodium silicate with ceramics in the engine in order to actually do that. Which is not that big of a deal.
I could still use hydrogen gas for the fuel...
I could try using the most amount of trics for efficiency that I could find, like the elko Elsbett engines, which were a kind of semi-adiabatic engine (adiabatic engines are the top efficiency of all internal combustion engines) that used hollow piston heads with a vortex generator direct injection and ingnition, which created an air separation layer between the piston head and the gas inside the engine, which in turn avoided the heat exchange between the fuel, air and piston, creating a somewhat adiabatic combustion.
Thus the name.
It could run with pure oil and diesel, with any kind of fuel, in fact. It was said to be 65% efficient, but I doubt, it would probably be, at best, 40% efficient.
__________________________________________________________________________________________________________________________________________
In any case, I don't feel like I can just handwave my way into a conveniently cheap energy source and/or equipment.
If it was this simple to make a composite engine, there would be more of those.
If it was this simple to make soft magnetic composite electric motors, there would be more of those.
I just hit a new roadblock because of my own negligence and incompetence.
-
Project Log 58: DIY Electric Motor¹.
07/06/2023 at 15:49 • 2 commentsThursday, 06/07/2023, 12:40.
(I wrote this project log before copy-pasting it here)Anyway, back to DIY electric motors:
I can't simply use two 10:1 reduction ratios (which would give 100:1 in total) simply because if I want to reach 30 rpm with a 100:1 reduction ratio it would take too long, and besides, I think it is for the best if I actually follow the experts advise on it.
And thus, I think it is for the best if stay with the 4500 to 9000 watts (6 and 12 hp) wattage for the actuators, not because of the wattage on itself, but because of the structural integrity. The 9000 watts actuator will rotate a 10cm diameter (5cm radius) hoist/winch, and thus, a 10 cm diameter HDPE reinforced beam would probably be able to withstand such loads.
Of course, the load will be equally divided between 6 actuators, and thus, they would be operating at safe parameters.
In any way, I believe I incorrectly wrote the values. For example, if I add a 5cm radius distance and a force of 30,000 newtons (3000 tons to lift 1 ton at the said distance), I would need 1500 newton meters, and thus, with 30 rpm (15 cm per second of linear speed), it would give 4713 watts of power (6.32 hp), not 9kw.
I wonder were I took that 9kw from... hum... I think it was because I thought I would need to double the torque or the rpm...
Anyway, since I can only use a 10:1 reduction, and since I would divide the entire load between 6, or at worse, 3 (in the case of hexapod rotation), I would need electric motors with 50 newton meters of torque.
Meaning that I would need around 25 of those brushless motors I were intending on using. That Eagle power one.
So, instead I think I will try to find a 3D model or a motor that can be bought with 50 Nm of torque.
... And it is harder than it looks like... I ran through a bunch of 10-15kw brushless motors that can't even make through 5 newton meters...
------------------------------------------------------------------------------
... Dunno if I already posted this, but I think it would be interesting to use the REB-90, a 80kw brushless motor with 300 newton meters of torque.
Obviously, I won't make something with actual 300 newton meters of torque, I will downside it a little bit because it would need around 100 amps, which is quite dangerous.
Besides, the motor has 13 to 20cm of height and 27cm of diameter, it is a chonky boy.
Edit¹:
Do NOT take my advice, first consult a professional.
I was looking here after a look at Dekutree64 advice and aparently, our skin has a resistance of 100kOhms, meaning that a 100 amperage current with as little as 1 volts would only pass 10 miliamps (0.01 amps) through the insides of our body.
So every electrical discharge has to first pass through the resistance of your skin (that diminishes significantly once you're wet), and then the resulting current may have consequences on your body.
However, how much the amperage/voltage will damage your body is like defining how lethal a bread knife will be lethal to you.
Depending were (like your heart) and for how long, the electrical discharge can be fatal.
Even 7 miliamps (0,007 amps) passing through your heart for 3 seconds would be enough to stop it.
But, as said before, it would need to surpass the resistance of your skin, then reach specifically for your heart.___________________________________________________________________
However, while I was comparing the 3D model to the photos and engineering illustrations that the own company showed and the link I just posted of GrabCAD, I noticed that the 3D model is just a mocap (it is on the description, but I didn't read, lol). The stator in the real thing has 45 teeth if I'm not mistaken.
I tried to take the picture put it on a image editting software (krita, which is free and open-source) and simply took a section of 3 magnets (that you can clearly see) and then copy past these "pizza slices" until they made a full circle, and I counted around 60 magnets on the rotor.
I asked to chatGPT the relation between the number of stator teeths and the number of magnets and it said that such brushless motor should have around 31 magnets.
Well, I tested align the 3D model magnets and the magnets in the pic, and it seems that 60 is the correct number.
------------------------------------------------------------------------------
I Couldn't find more pics of the REB-90, but I did find pictures of the REB-60, which is actually 60kw in power, has 250 Nm of torque and 4000 RPM.
It is thinner and the images show every part of it, which is a bonus.
On it I counted around 45 stator teeth and 60 magnets and based on the wattage, it would need around 75 amps (75x800 = 60,000 watts).
This would mean that the only difference between the different types of REB motors is the thickness of the magnets and stators (on top of the winding thickness and so on).
------------------------------------------------------------------------------
In the previous project log I suggested using electroplating or sputtering on cut into shape aluminium foils and then stack it as a stator, but I'm starting to rethink it, more or less.
Sputtering is quite hard and expensive, although it would give me a lot of options for both fuel cells and electric motors... But... After looking more into it, I really can't make such system in a homemade configuration in the cheap.
You can't really use the "cheap" 400 reais (83 dollars) vacuum pumps you find online, you need a super low pressure vacuum pumps that costs around 1000 reais (200 dollars) or even more.
And Sputtering services cost around 70 dollars per hour of service, and meaningful coatings of metals take around 20 to 30 minutes.I found this video here, but I don't know if I would be able to make it (due to skill issues).
He says he uses "microns" (aka microns of mercury), which 89 micros is around 0.089 torr, but high vacuum starts at 0.001 torr, not the ideal condition for properly made Sputterings, but hey, it is cheap.
Welp, maybe one could make this oil pump for high vacuum with a negative casting piece, and you could make it with tin, zinc, lead or anything that doesn't melt at around 50 to 100ºC.
Maybe the guy (or me) could make it at simple plastic. Such teflon. :|I asked chat gpt for metals that can be melt in a frying pan:
Tin (Sn): Melting point of 231.93°C (449.47°F)
Lead (Pb): Melting point of 327.5°C (621.5°F)
Zinc (Zn): Melting point of 419.53°C (787.15°F)
Bismuth (Bi): Melting point of 271.4°C (520.5°F)
Cadmium (Cd): Melting point of 321.07°C (609.93°F)
Indium (In): Melting point of 156.6°C (313.9°F)More information:
"Diffusion pumps, on the other hand, rely on the principle of vapor jet diffusion to achieve high vacuum levels. They typically use a low-vapor-pressure oil as the working fluid, but the oil does not boil as part of the pump's operation. Instead, the oil is heated to a temperature high enough to generate a vapor jet that entrains and pumps out gas molecules from the chamber."
"Oil diffusion pumps can operate well with wall temperatures of 86°F (30°C), whereas the walls of mercury diffusion pumps must be cooled to 59°F (15°C)."
Source.For even higher vacuum: "10-5 to 10-6 Torr = 180-190 °C".
Source.So I would need a fridge air compressor to be used as a vacuum pump (yes, vacuum pumps are literally compressors used on the reverse) and then use the diffusion pump.
------------------------------------------------------------------------------
So, unfortunately, or fortunately, I will be using elctroplating nickel, iron and I will try to attempt on using silicon metal to do it aswell.
I will try to electroplate graphite/graphene powder by using the following setup:
Negative and positive electrodes made of the same material and put a low speed mixer in the middle, the electropalting will innevitably hit and/or use the partially conductive graphite/graphene and coat/cover then in a layer of the desired metal.
I will then use the final powder to make the soft magnetic composite material for the stators of the electric motor and/or use the resulting powder as the catalyst of the alkaline hydrogen fuel cell.I think I would try this water blade:
It would also take days to usefully coat all the kilograms necessary to make it work, but at least it would be dirty cheap.
In fact, so cheap that I will try to finally make it for real this time.
(I was going to try it for this log, but I forgot to buy it, and got too focused on this electric motor, so... It is for the next project log I guess)Although I need to make a correction: I believe I can't really use pure iron with the vinegar salt solution, I would need to use sulfuric acid for that, which is... Dangerous.
------------------------------------------------------------------------------
I was asking around and I heard a very good piece of advice:
"Electroplating electrolytes use very specific formulations. Yes you can deposit a little something with a poorly formulated solution, but to electroform you should use a proper formulation. I know several people who have spent their entire working life specializing plating just one metal. Tin or copper or gold…. It can become quite complex and details matter. Look around, you can purchase ready made electrolytes or find the recipe and make it yourself, but finding the correct components will take commitment."
Although it is a good advice, the electrolyte solutions costs around 400 reais (81 dollars).
------------------------------------------------------------------------------
Anyway, AWG for the copper wire.
If you don't know what AWG is, it is basically the standard of diameter and electrical resistance of a certain type of wire. In this case, enameled Copper Wire.
The bigger the diameter, the bigger the current or voltage it can pass through it without melting.
However, for some reason, every list that I come by has a different value for every AWG. Some don't even have amount of current on the AWG for some reason.
On wikipedia, a 10 AWG has a maximum 15.8 amps of limit, while in other sheets, the maximum amperage for power transmission is 15, while maximum amperage for chassis wiring is 55.
https://pt.wikipedia.org/wiki/Escala_americana_de_bitolas_de_fios
The other sheet:
https://www.powerstream.com/Wire_Size.htm
While in this one, it says it has 35 of maximum amperage:
https://learnmetrics.com/wire-gauge-chart-amp-wire-sizes/
Some sellers may or may not tell you the maximum amperage of their copper wire, but they will definitely tell you the AWG. Thus the need for such sheets.
In any case, not having the propper AWG for your application is not the end of the world, even properly made high amperage cables/wire often are made with multiple wires of lesser amperage, thus distributing their amperage through all the wires (or so I thin).
(I asked some sellers on brazilian websites and they said it is 30 amps for 7-8 AWG)
------------------------------------------------------------------------------
The other problem that I need to solve is figuring out how many turns of copper wire each stator on a REB-60 has, this is as equally relevant as any other matter of the subject, because if you put too many turns, the voltage can drop and be converted to heat, or you may have a too little turns and have lower eletromagnetic strength.
Although, if I had an actual 3D model with all the parts of this electric motor, I could say it is a copy, but since I will be going in blind, I believe it is already a completly different electric motor.
So let's change the name, instead of REB-60, let's call it something like PEG-69 ( ͡° ͜ʖ ͡°) hehe.
------------------------------------------------------------------------------
Anyway, 3D modelling this dang thing:
![]()
I changed a lot of proportions for the sake of toughness, In my little brain, it all seemed too thin and fragile, but now I'm starting to regret my decisions (as always), because a little change in size could strongly affect its efficiency (I think).
![]()
Luckly, I started with the electric motor normal proportions and changed it afterwards, so I don't need to redo everything...
Bruh, I just did this right now and I feel tired and lazy as heck...
Also, I was thinking here: this is a BLDC motor meant for aviation, right? So the cooling system is entirely based on the air pushed by its props, right?
So, I think I would need to make some modifications to allow for a deionized water cooling, like putting everything in a closed space, using potting to waterproof everything and so on.
I would need to do potting anyway, since I would need to protect the motor against mud, water and stuff like that, so I guess it shouldn't be that bigger of a problem.
And with that, deionized water is optional, but it is an extra layer of safety (electronics don't fry when exposed to deionized water or mineral oil, but mineral oil for electronic cooling is expensive as frick here where I live)Potting, for those who don't know:
... The question is:
How the heck I do that? I'm bad at 3D modelling y-y
Luckly there are a ton of tutorials on how to do it, so I don't really need to make it from scratch.
Also, I took a look at actual brushless motors that are watercooled and/or waterproof.
The last one uses a thermal paste on the coils for efficient heat transfer, I guess one could mix thermal paste with plastic/resin in order to achieve an efficient thermal transfer.
![]()
So, I made this 3D model like this for a couple of reasons:
Initially I wanted to make everything connect to a central fixed rod, so it would be easier to align everything. But after a while I got even more confused how I would fix a round/square rod supposed to lift tons of weight in the structure of a future mech.
So I deviated from it and came back to the original design of the REB-60, where the rotor is connected to a giant bearing in one side and a smaller bearing on the other side where the shaft is connected.
So I did a bigger ring/tube on the inside and a smaller ring/tube on both sides, so, supposedly you were going to cut it on one side and keep the other the same and also, supposedly², put the electronics on the space in between.
But now that I stopped to thing about it, I don't feel like it is a good idea at all... After all, how you would put that on a laser cutter? You would be forced to use a big ass 3D print that may or may not have a lot of defects (and probably won't even fit in your 3D printer bed).
So, right now I will need to remake everything with the laser cutting in mind.
I was thinking here: how the heck I will attach the magnets on the inner part of the rotor? Even milimeters of distance can decrease the magnet force substantially. I was thinking on adding fibers (glass or carbon) and felt made out of the same fibers in front of the magnets (or the mockup of the magnet)so when everything dries out, the magnets are as close as possible to the electromagnets.
As consequence, the rotor will have to be thicc as heck.![]()
I hope I can explain this in a comprehensive manner...
Basically, What I've done was adding a 5cm diameter rod at the center, a concentric 10cm diameter rod then the stator, then the magnet and then the rotor.
The idea is that you can take these rods and concentric rods and chip off the imperfections and arrange them on your choosing for the mold.
The concentric rod could be the space to add the other side of the rotor, while the inner rod could be the thinner side of the rotor, just like in the REB-60.
However, you could make a bigger concentric rod or anything like that and make a perfurated stator with some holes for screws or nuts with the size of your choosing. Just like in the example on the left, although the holes are place in a quite weird place.
Then, on top of all of that, you could place homemade lids on each side of the rotor and glue and/or screw everything together.
Although, unfortunately, you wouldn't be printing/molding everything in one go, except for the stators, I do think it would be possible to make everything in a homemade lathe of some kind.
Since the material which one would use for the laser cutting could be styrofoam or other kinds of plastic, you could take a few liberties on how to build your thing out of this model.I added the blender 3D model on the files of this project by the way.
Edit¹:I also added the modified 3D models on the blender file of the Eagle Motor and the U8 Lite motor.
_____________________________________________________________________
OFF-topic:
For some reason, continuum robots (aka tentacle robots) are drawing my fascination again for some reason. I don't really understand why my brain goes "continuum robots better", but I simply think these would be the excellent robots... Except for heavy cargo.
Right now continuum robots are not known for precision and strength, but for human interaction (the normal one, not... you know) because you can't really be killed by a balloon.
But it came to my mind that maybe I could maybe stack dozens or hundreds of continuum robots together in order to make a robot.
Of course, artificial muscles aren't really efficient with todays technology (to my knowledge), but electric motors are, and I could equally stack continuum robots just the way someone would stack artificial muscles in a body.
On top of that, it could still be safer to work around humans, since the hundreds of "cords" would be equally distributing all the loads, it would like if a bunch of stuff were dropped on top of someone.
... Not a pleasant experience, but better than a giant solid single stuff falling on top of you.Although you would still face the same problem of lack of efficiency just like conventional humanoid bodies: the top actuator will be sustaining the weight of the bottom actuator instead of all of them working together for ultimate efficiency. Unlike the stewart platform limbs I was planning on using for the mech/exosuit.
... Or maybe not. I just remembered that some continuum robots/tentacle/robots are actually 3 or 6 tendons directly connected to the entire structure until its tip.
![]()
I could connect the tendons just like a giant stewart platform; and on top of that, I do think it would be possible to add the movement of the feet, hands and its fingers to the stewart platform spine as well in order to increase its movement range, equally distributing the loads.
... Although the idea of hundreds of tentacles is interesting, the idea of building hundreds of tentacles is not so much...
Imagine making 100 DIY brushless motors... ugh...It would still be better to just make 1 tentacle per limb...
However, a good side for this is simplicity. I don't need bearings, universal joints and things like that, "just" a spine of a tentacle and a rope attached to a motor with reduction gear or not. But I do believe I would need some kind of "spacer" between each "bone" of the "spine", I think it would be interesting to use low pressure pneumatic cushions, I could even use these to enlogate or change the shape of the limb entirely based on which balloons/cushions I fill. Which would also relief the amount of energy required to run the torso acutuators, reducing the energy cost even more (although I think it would be the best to not have a torso in this continuum mech).
Plus, I could make every spine vertebrate the same thing or different gradiants of thickness/length/diameter, which would make the body even easier to build in a DIY setup.... I hope I'm not jumping to conclusions, but I think this is sounding better and better.
------------------------------------------------------------------------------
Also... I feel like I already talked about this idea before... But I don't quite remember if I actually wrote about it here...
Well, I couldn't find any kind of concept art that shows exactly what I'm thinking, but this little drawing that I found may be useful to explain:
![]()
(source of the art: https://www.deviantart.com/jcoon/art/Tentacle-Robot-441291077)
Just imagine these tentacles he is sustaining himself onto actually two legs or arms, but shorter.
------------------------------------------------------------------------------
Also, i was trying to find a mechanism that can both push and pull in order to help with the continuum robot limbs, but I can't find anywhere such thing... Except on autoloader tanks.
In some soviet era tanks there is a little arm that pushes the amunition into the tank cannon, but these retract in a spiral inside a compartment.
I'm still trying to figure out how these work and what is their limitations, but I don't really know what is even the name of such mechanism.
(on the left shows it working)
The other mechanism that is similar to that is the zipper linear actuator, and I can find even less information on the subject...
(this last one shows how it can be bendy, but it looks like an unwanted feature rather than the objective)
Funny how I started this project because of this actuator, and I'm back at it again...
I found these two types, I wonder if it is the same thing...
In either way, I think it would be better to use such mechanism in the rigid body type and/or the continuum body type, it seems better than using hoist/winch mechanisms...
------------------------------------------------------------------------------
Welp, while thinking a little bit harder about the whole zip-chain mechanism, I was wondering if it would really work as a pushing mechanism.
You see, I was wondering it really would be possible to push tons of weight with such fragile-looking mechanism, if there is an engineering limit that I can't calculate due to my lack of knowledge and instead of actually pushing stuff, the zip-chain would just bulge/collapse on itself or inside the tube-channel in which the zip-chain would be travelling inside.
Not to mention that it would probably be a hell of a job to make a zip-chain actuator since I was already having a hell of a time trying to make a conventional sprocket.
In any case, I was wondering in a way of achieving that with the pulling mechanism alone of these conventional spinal continuum robots.
The idea is basically: imagine a single spinal tentacle robot with a pulling string in opposite sides, denpending on which side you pull, you will make it coil in the direction in which the mechanism is being pulled.
Now, imagine two parallel tentacles that work the same way, but these are glued together or simply glued only at the tip, if both pull the right string, the entire thing will move to the right.But, if you pull these two strings with different forces, you could make the entire tentacle move upwards and coil itself at same time (I think).
The same way, if you were to pull the two right strings at same time, but a single one left string, it would (probably) move the entire tentacle arm backwards while coiling the thing, like you were to contract your biceps and move the arm backwards.![]()
(i've drawn the supposed stewart platform design with perfect hexagons because I forgor about this detail, but just imagine it is the face of stewart platforms)
Now imagine this, but instead you are doing the same "string-play" with 6 tentacles at same time, and each tentacle is a stewart-platform tentacle.
It would allow for an enormous variety of movements while distributing the loads throghout all the tentacle.(I think).
Actually... I'm really starting to doubt if this is going to actually work >.>I would need to find a way of making a simulation like that, and on top of that, I would need to find a way of controlling the limbs somehow... >.>
------------------------------------------------------------------------------
Also, I just rememebered what I talked about in project log 16, if I can make a mech safe to be around, I can make an exoskeleton even safer to use...
-
Project Log 57: DIY Hydrogen Fuel Cell³.
06/29/2023 at 13:14 • 0 commentsThursday, 29/06/2023, 10:09
I left this project log written in a text file and I forgot what I was supposed to originally write on it, but I think it is worth posting.
__________________________________________________________________________________________________________________________________________
So, I was looking at some youtube videos about magnetic gears just for procrastination porpuses and to my surprise, 3D printed gears are around 82% efficient.
Not 90%, as I would liked, but still a quite of a number for a bunch of plastic poorly sticked together.Welp, maybe I could not be as obsessed with precision and efficiency with the use of laser cutting stores, because I kinda feel like if I were to actually call a random laser cutting store, they would probably not be as concerned with precision as I would.
Also, this recent video from James bruton may be useful, since he does teach a bit on how to improvise good precision:
However, I'm finding a little bit hard to come up with the right choice of words to find high precision tutorials for DIY projects.
Also, I just found this tutorial that I think it might be useful:
It is a video tutorial on how to use DVD/floppy drivers to make a DIY high precision 3D printer.
And I'm not kidding on the "high precision" aspects, the DVD/CD readers and engravers need to have microscopic precision capabilities in order to precisely read the information present on CD's/DVD's, so a 3D printer or even CNC machien using these would be extremely precise.It might be relevant to reach out for these 3D printed high precision gauges... >.>
__________________________________________________________________________________________________________________________________________
Also, a couple of things that I need to add about the Hydrogen Fuel cell:
Bruh, to be honest, it is not a "couple", it is a lot... If I don't literally copy paste the entire ChatGPT conversation, I don't really know how to summarize everything in a meaningful manner that can be compreensive without letting essential details behind.
It is like trying to explain how a combustion engine works, yeah, I could tell you how it work, but it would be useful if I told you why I choose to do a combustion engine the way I did, so you can have a better comprehension of how to do it.
---------------------------------------------------------------------------------
1- Catalyst ink deposition:
There a couple of methods used for depositing/binding/adding the catalyst and other reactants to the electrodes, and I say this because mixing pure iron and/or nickel to a carbon substrate and burn it wouldn't be beneficial, in fact, it would make the fine powder of iron-nickel chemically react to carbon in order to make Steel-nickel alloy (steel is iron with carbon).So, I would need to make the carbon sponge electrodes with sodium silicate/potassium silicate and then add the powder later.
The powder with the catalysts and other mateirals would be dispersed/dissolved in acetone and/or Ethanol (and others, such as water, but it could oxidize the iron/nickel) and then sprayed on the electrodes, like a ink, which would just evaporate and leave the essentials behind.
---------------------------------------------------------------------------------
2- Additive enhancer on the electrodes:
So, I did say in the previous project log that one could add some extra things to the membrane and electrodes so its efficiency/performance is increased.
I don't know if professionally/industrially made hydrogen fuel cell employs all the little bits and so on, but since these have properly made materials (such as Nafion, platinum and carbon black/vulcan), I think it would be useful to add to this specific DIY situation.2.1: Conductive Carbon additives:
Yeah, the homemade graphene that I don't shut up about, carbon nanotubes and/or carbon fibers.2.2: Binders:
Common binder materials include Nafion, polyvinylidene fluoride (PVDF), or polytetrafluoroethylene (PTFE). Binders aid in maintaining the structural integrity of the electrode and improving catalyst adhesion.2.3: Surfactants or dispersing agents:
Triton X-100: Triton X-100 is a nonionic surfactant commonly used in ink formulations. It can improve the dispersibility and stability of the catalyst particles.
Sodium dodecyl sulfate (SDS): SDS is an anionic surfactant that can be used to disperse catalyst particles in aqueous-based inks.2.4: Porosity-enhancing agents:
Certain materials can be incorporated into the catalyst ink to introduce porosity to the electrode structure. For example, sacrificial pore-forming agents like polyethylene glycol (PEG) can be mixed with the ink. During the electrode fabrication process, these agents can be burned off or dissolved, leaving behind porous structures that enhance reactant diffusion and increase the electrode's active surface area.
Polyethylene glycol (PEG): PEG is a commonly used sacrificial pore-forming agent. It is added to the ink in solid or dissolved form and subsequently burned off or dissolved during the heat treatment or washing steps of the electrode fabrication process.
Besides PEG, other sacrificial polymers can be used as pore-forming agents. Examples include polyvinyl alcohol (PVA) and cellulose derivatives. These polymers can be incorporated into the catalyst ink and subsequently removed by thermal decomposition or solvent extraction.2.5: Stabilizers:
Cerium salts:
Cerium salts, such as cerium nitrate or cerium oxide nanoparticles, can be used as stabilizers to mitigate catalyst degradation in certain fuel cell systems.
Ruthenium-based compounds: Ruthenium-based compounds, such as ruthenium dioxide (RuO2), can act as stabilizers for certain catalyst materials.
Inorganic particles: Inorganic particles, such as silica particles or alumina particles, can be used as templates for creating pores in the electrode structure. These particles can be mixed with the catalyst ink, and after the electrode fabrication process, they can be etched or dissolved, leaving behind pores.Cerium salts: Cerium salts can be used as stabilizers in certain fuel cell systems. Common examples include cerium nitrate (Ce(NO3)3) and cerium sulfate (Ce(SO4)2). These salts can provide protection against corrosion or degradation of catalyst materials.
Cerium oxide-based catalysts: While cerium oxide (CeO2) itself is not a salt, it is an inorganic compound that can act as a catalyst or catalyst support in fuel cells. Cerium oxide-based catalysts can exhibit enhanced oxygen storage and release properties, which can be beneficial in certain fuel cell systems.
Cerium-based mixed metal oxides: Cerium can be combined with other metal elements to form mixed metal oxides, which can be used as catalysts or catalyst supports. For example, cerium-zirconium oxide (Ce-Zr-O) or cerium-titanium oxide (Ce-Ti-O) are commonly used in fuel cell applications, especially in solid oxide fuel cells (SOFCs).
---------------------------------------------------------------------------------
3- Additive enhancers for the membrane:
ChatGPT explains it throghouly, but just to remember how the membrane would be made:
Each DIY alkaline eletrolyte membrane will be made using 10g of PVA (polyvinyl alcohol) 5g of PVP (polyvinyl pyrrolidone) mixed with water, molded into shape until dry with no bubbles, prensed between two glass plates for optimal surface. Then 20ml of glutaraldeyde (2%), 10 drops of HCL (Chloridric Acid) and 40ml of pure acetone will be mixed in a crosslink solution in which the membrane will be submerged for 40 minutes for the reaction to occur and transform the membrane in some hydrogel looking material. Lastly, a solution made with 50 ml of water, 8.6g of KOH where the membrane will bath is then heated up to 60ºC for 3 hours until the membrane gets a browish colour. Meaning it is ready to be used.
PS: ChatGPT said that it would be recommended to maintain the membrane materials at maximum 100ºC of temperature and pressures at between 1 to 6 atmospheres/1 to 6 bars. Were the oxygen side is normally at ambient pressure.
"To incorporate enhancers such as graphene, carbon nanotubes, ionic liquids, conductive polymers, and plasticizers into the alkaline electrolyte membrane, it would be ideal to introduce them at specific stages of the membrane production process. Here's a suggested approach based on the steps you provided:
PVA and PVP Mixing and Formation:
Graphene and/or carbon nanotubes can be added during the mixing of PVA and PVP. These nanomaterials can be dispersed in the water solution before combining them with PVA and PVP. This step ensures uniform distribution of the nanomaterials within the membrane.
Crosslink Solution:Ionic liquids, such as EMIM TFSI, can be incorporated into the crosslink solution. Mix the appropriate amount of ionic liquid with glutaraldehyde, HCl, and acetone to form the crosslink solution. The membrane should be submerged in this solution during the crosslinking process.
KOH Bath:
Conductive polymers and plasticizers can be introduced during the KOH bath step. Prior to immersing the membrane in the KOH solution, add the conductive polymers (e.g., polyaniline, polypyrrole) and plasticizers (e.g., glycerol) to the water-KOH solution. This allows for the absorption of these enhancers by the membrane during the final treatment.
By incorporating these enhancers at the appropriate stages, you can maximize their dispersion and potential benefits within the alkaline electrolyte membrane. However, it's important to note that the specific concentrations and amounts of these enhancers would require optimization through experimentation to achieve the desired performance improvements.When it comes to finding readily available and DIY-capable alternatives for ionic liquids, it can be challenging as these substances often require specific synthesis or specialized components. However, there are some options you can consider:
Homemade Ionic Liquids: It is possible to synthesize some ionic liquids using common chemicals, but the process can be complex and may require advanced chemistry knowledge. Here's a simplified example:
One example is the synthesis of a simple imidazolium-based ionic liquid. You can mix 1-methylimidazole (available from chemical suppliers) with an alkyl halide, such as bromoethane or iodomethane (available from hardware stores or chemical suppliers), in the presence of a base like sodium hydroxide or potassium hydroxide. This can result in the formation of an imidazolium-based ionic liquid.
It's crucial to note that working with chemicals and performing synthesis reactions requires proper safety precautions, equipment, and knowledge. Therefore, if you're not experienced in this area, it's recommended to consult with a chemist or obtain pre-made ionic liquids from specialized suppliers.Alternatives to Ionic Liquids: If obtaining or synthesizing ionic liquids is not feasible, there are alternative additives that can enhance membrane properties. Some possibilities include:
Conductive salts: Certain salts like sodium bicarbonate or potassium carbonate can improve the ionic conductivity of the membrane when added in small amounts.
Conductive polymers: Polymers like polyaniline or polypyrrole, mentioned earlier, can enhance conductivity and ion transport in the membrane.
Plasticizers: Glycerol is a commonly used plasticizer that can improve the flexibility and mechanical properties of the membrane.
These alternatives may not provide the exact same performance enhancements as ionic liquids, but they can still contribute to improving the efficiency and properties of the alkaline electrolyte membrane.
Remember to consider safety precautions, experiment carefully, and adjust the concentrations and amounts of these additives to achieve the desired performance while ensuring the overall stability and functionality of the membrane."
---------------------------------------------------------------------------------
4- Other methods for catalyst deposition:
Catalyst ink deposition (already explained):
This method involves preparing a catalyst ink by dispersing the catalyst material (e.g., platinum, nickel) in a suitable solvent along with a binder material (such as Nafion or polyvinylidene fluoride, PVDF). The ink is then applied to the carbon electrode surface using techniques like brush coating, spray coating, or screen printing. After deposition, the solvent is evaporated, leaving behind a catalyst layer adhered to the carbon substrate.Inkjet printing:
Inkjet printing allows precise and localized deposition of catalyst ink onto the carbon electrode substrate. The catalyst ink, similar to the catalyst ink deposition method mentioned earlier, is loaded into an inkjet printer, and droplets are selectively deposited onto the substrate. Inkjet printing offers high resolution and flexibility in catalyst patterning.Electrophoretic deposition:
In this technique, a suspension of catalyst particles in a solvent is subjected to an electric field. The charged catalyst particles migrate and deposit onto the oppositely charged carbon electrode, forming a catalyst layer. Electrophoretic deposition offers good control over catalyst loading and distribution.Physical vapor deposition (PVD):
PVD techniques, such as sputtering or evaporation, involve depositing catalyst materials onto the carbon electrode substrate in a vacuum chamber. The catalyst material is vaporized and then condenses onto the substrate, forming a thin catalyst layer. PVD techniques offer precise control over catalyst thickness and composition.Chemical vapor deposition (CVD):
CVD involves the chemical reaction of precursor gases in the presence of the carbon electrode substrate to deposit a catalyst layer. The precursor gases containing the desired catalyst material are introduced into a reactor, where they decompose and deposit the catalyst onto the substrate. CVD can provide conformal and controlled catalyst coatings.---------------------------------------------------------------------------------
4.1:
Well, I do think that the Sputtering may be simpler and cheaper to make/build/use, ironically enough, fine iron/nickel powder that is useful for chemical reactions are expensive as f8ck.
But nickel, iron and other material plates are really cheap... For electroplating. For sputtering is expensive as hell. I mean, for *proper* sputtering.If you don't know what sputtering is: Basically, you put a material target in a vacuum with a metal plate of your choice, then you apply plasma to this plate and it covers the material target.
You can literally make one with microwave parts or simple electrodes for welding.The problem is that since Vaccum pumps are expensive and the maintenence of proper vaccuum is kinda hard to do in a DIY manner, I believe you you would need just not a Co2 scrubber, but also a oxygen scrubber, because the oxygen would probably react with the iron and the nickel to form an oxide layer the same way it would also react with the carbon.
Of course, assuming that this would be enough of a problem, after all, in a closed chamber, eventually both would react with the present oxygen/carbon and cover the reacted layers with unreacted layers. Like a cake...?The thing is, our atmosphere is 78% nitrogen, 21% oxygen, 2% water vapor and 0.98% carbon dioxide, argon gas and others. So you wouldn't need vacuum if you were to use innert gases such as nitrogen and argon... *I think*...
... Well, I thought wrong, because nitrogen is definitely not an inert gas, only argon is, so I would need both a nitrogen, oxygen and co2 scrubber, lol. And nitrogen is definitely not easy to get rid of, which means I would need to either find argon gas sources (expensive), helium gas sources (even more expensive) or a vacuum pump (less expensive). lol
However, there could be something useful in this: silicon nitride is an isolator.
Meaning that I could sputter this material on windings or laminations in order to make isolating layers even thinner than enamelling.---------------------------------------------------------------------------------
4.2:
Welp... I can just go to electroplating, the electrodes need to be efficiently conductive anyway...
---------------------------------------------------------------------------------
4.3: Enhancing materials for electroplating:
"In electroplating for catalyst adhesion or deposition on electrodes, various types of enhancers or additives can be used to improve the plating process and enhance the quality of the catalyst layer. These enhancers can serve different purposes such as improving the adhesion, controlling the deposition rate, enhancing the uniformity, or modifying the properties of the deposited catalyst. Here are some specific enhancers commonly used in electroplating for catalyst deposition:
Surfactants:
Nonionic surfactants: Examples include Triton X-100, Pluronic, or Tween series.
Anionic surfactants: Examples include sodium dodecyl sulfate (SDS) or sodium lauryl sulfate (SLS).
Cationic surfactants: Examples include cetyltrimethylammonium bromide (CTAB) or cetylpyridinium chloride (CPC).
Brighteners:Levelling agents:
Examples include saccharin, coumarin, or p-phenylenediamine (PPD).
Sulfur-containing compounds: Examples include thiourea or thiocyanates.Additives for adhesion promotion:
Organic acids:
Examples include citric acid, tartaric acid, or malonic acid.Complexing agents:
Examples include EDTA, gluconate, or oxalate.Wetting agents:
Examples include ethoxylated alcohols or alkylphenol ethoxylates.Grain refiners:
Metal or alloy additives: Examples include grain-refining agents like bismuth, antimony, or cobalt.pH adjusters or buffers:
Acids: Examples include sulfuric acid or hydrochloric acid.
Bases: Examples include sodium hydroxide or ammonium hydroxide.
It's important to note that the specific enhancers or additives to be used will depend on the plating bath composition, the desired properties of the catalyst layer, and the specific fuel cell system requirements. The concentration and combination of enhancers will also vary depending on the specific application.For optimal results, it is recommended to consult scientific literature, research papers, or seek guidance from experts in the field who have experience with electroplating for catalyst deposition. They can provide specific recommendations and insights based on your system requirements and the catalyst material you are working with.
Levelers, also known as leveling agents, are a type of enhancer commonly used in electroplating processes to improve the surface smoothness and uniformity of the deposited metal layer. They help to minimize or eliminate uneven deposition, known as "dendritic growth," which can result in rough or non-uniform coatings. Levelers work by slowing down the deposition rate on high-current density areas, allowing more time for the metal ions to distribute evenly across the electrode surface.
Specific examples of levelers used in electroplating processes include:
Organic levelers:
Saccharin: Saccharin is a common organic leveler used in various electroplating applications. It can help promote a smooth and uniform metal deposition by preferentially adsorbing on high-current density areas, reducing their growth rate.
Coumarin: Coumarin derivatives, such as 2,7-dihydroxycoumarin, can act as levelers in certain electroplating processes. They exhibit surface-active properties and preferential adsorption on high-current density regions.
p-Phenylenediamine (PPD): PPD is often used as a leveling agent in electroplating baths. It forms a surface film that reduces the growth rate of metal deposits on the cathode surface.
Other levelers:Sulfur-containing compounds: Some sulfur-containing compounds, such as thiourea or thiocyanates, can act as levelers by preferentially adsorbing on high-current density areas and slowing down metal deposition.
The selection and concentration of levelers will depend on the specific electroplating process, the metal being deposited, and the desired surface finish. It is important to note that the effectiveness of levelers can vary depending on the specific system and conditions. Experimentation and optimization may be required to achieve the desired leveling effect.Consulting scientific literature, research papers, or seeking guidance from experts in the field with expertise in electroplating and levelers can provide specific recommendations and insights tailored to your application."
---------------------------------------------------------------------------------
All of this sounds cool and all, but I feel like these enhancers are expensive as heck...
I'm going to slep right now, but tomorrow I will search it throghouly.
And bruh, an annoying thing for me in ChatGPT is that it doesn't allow me to fuse different chats together. So I have dozens upon dozens of chats with closely related subjects or subjects that already were forgotten in the walls of text that it is basically poor use of space.
Edit¹:I just copy pasted all information of every chat to a single one, including project logs.
Then I copy pasted to a microsoft document that instantly crashed and took 10 minutes to load the entire document.
It gave around 1000 pages. Like, bruh.
__________________________________________________________________________________________________________________________________________
Also, I did try to check out how to make PEEK plastic, which is a high performance plastic that is so strong that it can easily surpass metals in almost all aspects.
The problem is that a single kilogram of PEEK filament plastic for 3D print costs 6000 reais (1200 dollars).
Also, it needs benzene to be produced, if you don't know, benzene is cancerous and toxic, so yeah...---------------------------------------------------------------------------------
"Producing high-performance polymers like polyether ether ketone (PEEK) or sulfonated polyetheretherketone (SPEEK) typically requires specialized equipment and expertise. It is a complex process that involves several steps and requires precise control over reaction conditions. Consequently, it is challenging to produce these polymers in a DIY configuration without access to a well-equipped laboratory and knowledge of polymer synthesis.
Here's a general overview of the steps involved in synthesizing PEEK or SPEEK:
"Raw materials: The basic starting materials for PEEK synthesis are 4,4'-difluorobenzophenone (DFB) and 4,4'-difluorodiphenyl sulfone (DFDPS). Additional chemicals are required for SPEEK synthesis, such as a sulfonating agent like sulfuric acid.
Polymerization: The synthesis of PEEK involves a step called nucleophilic aromatic substitution (SNAr), where DFB and DFDPS react together in the presence of a base, such as potassium carbonate, and a high-boiling solvent like N-methylpyrrolidone (NMP). This process results in the formation of PEEK.
Sulfonation (for SPEEK): If you specifically want to produce SPEEK, an additional step is required to introduce sulfonic acid groups. This is typically achieved by treating the PEEK polymer with a sulfonating agent, such as concentrated sulfuric acid, at elevated temperatures. The extent of sulfonation can be controlled by adjusting reaction conditions.
Polymer purification: After the synthesis, the polymer needs to be purified to remove any unreacted monomers, byproducts, or impurities. This purification process usually involves washing the polymer with solvents, such as methanol or water, followed by drying.
Polymer shaping: Once you have the purified PEEK or SPEEK polymer, you can shape it into the desired form. This can be achieved through various methods like compression molding, extrusion, or injection molding, depending on the specific application and equipment available.
It's important to note that the synthesis of PEEK and SPEEK involves potentially hazardous chemicals and requires knowledge of handling them safely. The reaction conditions, including temperature, pressure, and time, need to be carefully controlled to obtain the desired polymer properties. Without access to proper equipment, expertise, and safety protocols, attempting to synthesize PEEK or SPEEK in a DIY setting can be challenging and potentially dangerous.
If you are interested in obtaining PEEK or SPEEK for a specific application, it is recommended to source these materials from reputable suppliers who specialize in manufacturing high-performance polymers.
I understand your interest in acquiring the basic materials necessary for the synthesis of PEEK or SPEEK. However, it's important to note that the synthesis of these materials requires specialized chemicals and processes that are not readily available in common daily products or easily accessible to non-specialized individuals. Some of the chemicals involved can be hazardous, and their handling requires expertise and appropriate safety measures.
To obtain 4,4'-difluorobenzophenone (DFB) and 4,4'-difluorodiphenyl sulfone (DFDPS), you would typically need to synthesize them from precursor compounds or source them from specialized suppliers. The synthesis of these materials involves multiple steps and often requires specialized equipment and controlled conditions. I'll provide a general overview of the steps involved, but keep in mind that these processes can be complex and potentially hazardous. It is strongly recommended to consult with experts or professionals in the field before attempting any synthesis.
Synthesis of 4,4'-difluorobenzophenone (DFB):
Start with benzophenone: Benzophenone is a common starting material in the synthesis of DFB. It can be obtained from chemical suppliers or synthesized by various methods, such as Friedel-Crafts acylation of benzene with benzoyl chloride in the presence of a Lewis acid catalyst, like aluminum chloride.
Fluorination: Once you have benzophenone, the next step involves introducing fluorine atoms at the desired positions. This typically requires specialized fluorination reagents, such as hydrogen fluoride (HF) or elemental fluorine (F2), and careful control of reaction conditions. The fluorination process can be challenging and potentially hazardous due to the reactivity of fluorine.
Synthesis of 4,4'-difluorodiphenyl sulfone (DFDPS):
Start with diphenyl sulfone: Diphenyl sulfone is a precursor for DFDPS synthesis and can be obtained from chemical suppliers or synthesized by the reaction of phenol with sulfuric acid, followed by oxidation with a strong oxidizing agent, such as potassium dichromate or sodium dichromate.
Fluorination: Similar to the synthesis of DFB, the introduction of fluorine atoms is required to obtain DFDPS. This step can be achieved through fluorination reactions using appropriate reagents like hydrogen fluoride (HF) or elemental fluorine (F2).
It's worth noting that the processes described above are simplified summaries and may not cover all the specific details or conditions required for each step. The actual synthesis procedures for these compounds can be more intricate, involving multiple purification steps, reaction optimizations, and safety considerations.
To ensure safe and accurate synthesis, it is strongly advised to consult experienced chemists or professionals in the field of polymer synthesis or organic chemistry. They can provide guidance on specific reaction conditions, safety measures, and proper handling of chemicals."
__________________________________________________________________________________________________________________________________________
With all of that in mind, let's get back to the DIY electric motors that I was intending on making.
So, the idea was to take the iron/ferrite/nickel powder and also use it to make the soft magnetic composite cores of the stator of the electric motors.
However, as I already said, iron/nickel powder are expensive as f-ck, and I can't just "make" my own iron/nickel powder with a saw or something like that, the materials would simply react with other stuff in the ambient and chemically change for something not as useful for magnetic cores.
However, with the electroplating idea (that I took too long to remember and even consider doing), there could be another way of doing the electric motor.
The stators are built from laminations, metal plates are cut into shape and stacked together in order to make the stator, then the copper wire is coiled around the teeth/slots of the structure.
However, with the electroplating in mind, I could simply take aluminium foil cut into shape and put it in the electroplating with both iron, nickel and even, maybe, silicon metal.
I say maybe, because I couldn't find any electroplating tutorial on the subject and ChatGPT is saying that since the metal is a semiconductor and a reactive metal that could have unwanted reactions with the electroplating solution, so sputtering would be advised.The problem is that sputtering, even though you can make it DIY, is still a little bit... Expensive. It is not *that* expensive, to be honest, but I'm broke. lol
Still, I think it is better to do Sputtering than electroplating, because it is way faster.Also, I thought on something interesting for the electroplating technique.
Basically, the idea would be to put a crapton of conductive particles on the electroplating bath and keep these moving with some pump or mixer motor, the particles of graphite/graphene or other material would eventually be covered in iron/nickel/silicon and eventually making a composite that could both be used as the soft magnetic composite core and hydrogen fuel cell catalyst.But since you would have electroplating to begin with, and thus, be able to cover the electrodes of the fuel cell or the laminations of the electric motor, I don't really know why even bother with this step... hum... Maybe it would be useful if you wanted a Oxygen Scrubber?
Also², you don't really need aluminium laminations, you could simply use paraffin mixed with graphite or other conductive material and electroplate it.
This was how NASA made some older rocket nozzles:
(both videos are relevant to understand the pros and cons of electroplating, with its challenges and everythign in between) -
Project Log 56: DIY Hydrogen Fuel Cell².
06/24/2023 at 23:43 • 0 commentsSaturday, 24/06/2023, 20:06.
Edit⁴:
Although I always forgot to say this, ChatGPT is not a trained and well informed professional on anything, and all the affirmations that it makes and that I take as somewhat truth are not, in fact, true.
I could say or take something incredibly wrong and incomplete as truth, when in fact, I don't dominate the subject in any capacity to simply say "I know what I'm doing".
It is not like I can pay some professional to actually make this project, so I will be forced to work with what I got.
And what I got is gut feeling and a stupid AI that doesn't know how to do math. :|
![]()
Also, relevant:
Summary:
Each DIY alkaline eletrolyte membrane will be made using 10g of PVA (polyvinyl alcohol) 5g of PVP (polyvinyl pyrrolidone) mixed with water, molded into shape until dry with no bubbles, prensed between two glass plates for 24h for optimal surface.
Then 20ml of glutaraldeyde (2%), 10 drops of HCL (Chloridric Acid) and 40ml of pure acetone will be mixed in a crosslink solution in which the membrane will be submerged for 40 minutes for the reaction to occur and transform the membrane in some hydrogel looking material.
Lastly, a solution made with 50 ml of water, 8.6g of KOH where the membrane will bath is then heated up to 60ºC for 3 hours until the membrane gets a brownish colour. Meaning it is ready to be used.
_____________________________________________________________________
Right now I feel stupid and dumb.
You know the Alkaline Hydrogen Fuel Cell that I talked about? That it needed pure oxygen and all that stuff?
Well, guess what, I can just use a Carbon Dioxide Scrubber System at the air entrance of such hydrogen fuel cell.
The CDS system, although it sounds fancy, it is just Sodium hydroxide (caustic soda/lye) beads/granules in a filter before the system, so the KOH (potassium hidroxide) electrolyte/proton exchange membrane and the iron/nickel based catalysts don't get poisoned with carbon.
Once these are saturated with the product of the reaction (Sodium Carbonate or soda as), you can just heat up the material so it releases the carbon dioxide (CO2) and then it is ready to be used again.
There are even tutorials on youtube.
There are some tutorials teaching how to use it to "purify your air".
Welp, I don't know about you, but I ain't putting caustic soda in my homemade filter.PS: I read somewhere that you could also use activated carbon in order to capture the CO2 from the air, but these are not as efficient.
I showed this project log to a friend of mine and he didn't quite get what was so simple about this conundrum. So, in summary:
Basically, I thought so fricking hard to make an hydrogen fuel cell that doesn't break down in contact with regular air that I completly missed the point on asking *why* it breaks down in contact with the air.
And the reason is because of the CO2 in the air that slowly destroys it, and I can simply put a filter in front of a fuel cell in order to make it work properly.
That's why it was so simple to solve.
And that's why I felt so dumb: I could've just have asked the right question and I would've found the right solution.
____________________________________________________________________
In fact, you could literally use sacrificial KOH before the Alkaline Hydrogen Fuel Cell and then reverse it.
How do you reverse it?
You dissolve in water.
:|
You could literally dissolve KOH on a water tank, then pass gas bubbles through the tank, cause the cristalization until it is satured and fully crystalized, then open it to ambient air so the CO2 can escape the solution.
![]()
Edit¹:
As it is the nature of ChatGPT, it kinda oversimplified some steps, for example, the reversibility of the sacrificial KOH from Potassium Carbonate back to Potassium Hidroxide.
It involves mixing it with other acids in order to get back at KOH, and at first, it suggested some really dangerous and nasty acids such as Nitric Acid.
However, it gave the following solution using acetic acid, which in its own impure state is also known as vinegar:
Acetic acid (CH3COOH), commonly known as vinegar, can also be used to convert potassium carbonate (K2CO3) back to potassium hydroxide (KOH). The reaction with acetic acid proceeds as follows:
K2CO3 + 2CH3COOH → 2CH3COOK + CO2 + H2O
In this reaction, potassium carbonate reacts with acetic acid to produce potassium acetate (CH3COOK), carbon dioxide (CO2), and water (H2O). The carbon dioxide is released as a gas, and the resulting product is potassium acetate.
To obtain potassium hydroxide from potassium acetate, you can perform another step. You would need to react potassium acetate with a strong base such as sodium hydroxide (caustic soda/lye) or calcium hydroxide (slaked lime/hydrated lime):
CH3COOK + NaOH → CH3COONa + KOH
In this reaction, potassium acetate reacts with sodium hydroxide to produce sodium acetate (CH3COONa) and potassium hydroxide (KOH). The sodium acetate is a byproduct and can be separated from the potassium hydroxide solution.
Alternatively, you can also convert potassium acetate to potassium hydroxide by electrolysis. By passing an electric current through a potassium acetate solution, you can split the acetate ions and generate hydroxide ions, leading to the formation of potassium hydroxide.
So, while acetic acid can be used to convert potassium carbonate to potassium acetate, an additional step with a strong base or electrolysis is required to obtain potassium hydroxide from potassium acetate.
And once both Caustic soda and/or Slaked lime are saturated with CO2, you would need to heat up both to around 800 ºC.
Well, it would be easier to simly stay at Caustic Soda to begin with instead of all this convoluted plot.
I say this, because I was thinking on actually pumping the KOH solution inside and outside of the fuel cell system in order to continiously purify its air and its electrolyte at same time, after all, soon or later the electrolyte would also become poisoned with CO2 content since no method is 100% efficient at keeping these things alway.
However, I don't know if it would be wise to literally heat caustic alkaline water to 800 ºC constantly in a system in order to keep it from getting CO2 poisoned.
I know that it would be possible to heat small spoon quantities of Caustic Alkaline Water to 800ºC in continuous steps, but it would be safer/practical/efficient to do that?
_____________________________________________________________________
Also, I'm asking a lot of stuff to Chat GPT, and it seems like the membranes used on Alkaline Hydrogen Fuel Cells are "Polymer Electrolyte Membranes" PEM, but it also says that I should use KOH impregnated Nafion, which is a proton exchange membrane PEM.
... Which is leaving me confused, but ok.
Also, I was asking what would happen with other components if I were to mix KOH with it. You know, it would be relevant since I was thinking on using cement or plaster.
"When potassium hydroxide (KOH) is mixed with sodium silicate (also known as water glass), several reactions and effects can occur:
- Formation of Silica Gel: The combination of KOH and sodium silicate can result in the formation of a silica gel. The alkaline nature of KOH reacts with the silicate ions in sodium silicate, causing the gelation of silica. This gel formation can lead to increased viscosity and thickening of the mixture.
- Alkalinity: Both KOH and sodium silicate are highly alkaline compounds. Mixing them together will result in an even higher alkalinity in the solution. This increased alkalinity can have various effects, such as enhanced reactivity, increased dissolution of certain materials, and potential damage to organic substances.
- Binding Properties: Sodium silicate is known for its binding properties, and when combined with KOH, it can act as a binder or adhesive. The resulting mixture can form a solid mass or bond surfaces together, depending on the application and concentration.
- Increased pH: The pH of the mixture will be significantly high due to the presence of KOH and sodium silicate. This high pH environment can impact the stability and reactivity of surrounding materials, including cement, plaster, or other substrates.
It's important to note that the specific effects and outcomes of mixing KOH with sodium silicate will depend on the concentrations, ratios, and specific conditions of the mixture. These factors can influence the viscosity, binding properties, and chemical reactions that take place. It is recommended to conduct small-scale tests or consult experts in the field to assess the compatibility and desired outcomes for your specific application."
Well, you now know that if you simply mix KOH with Sodium Silicate (liquid glass) you will make a really good electrolyte membrane for the Alkaline Hydrogen Fuel Cell. :|
Edit³:
Actually, mixing Sodium Silicate with Potassium hydroxide (KOH) won't work, it will result in Potassium Silicate and Sodium Hydroxide (Caustic soda).
(potassium silicate can be either found as liquid glass, such as sodium silicate, or fertilizer, but I don't know which type is the better for this application, I would bet on potassium silicate liquid glass, since it would probably be purer than fertilizer)
You would need to mix Potassium silicate and Potassium Hydroxide together in order to make the somewhat solid electrolyte compound of "Potassium Silicate Hydroxide", it isn't super soluable in water, but it could affect it after some time.
I was kinda wondering it wouldn't be better to simply make a reversible hydrogen fuel cell, where after the pure hydrogen and pure oxygen are converted into water, you could separate both again and store both in a container.
It would work just like a battery, but not with 90% of efficiency... Althogh I would just mix tanks and explode everything, lol.
Also, I asked the same thing in other chats with chatGPT and basically, if mixed with water, it can transform the things into hydrates, which doesn't seem to be that useful for the reaction.
But in any case, an alkaline hydrogen fuel cell can either be KOH (potassium hydroxide) based or Sodium Hydroxide based, in either case you would need to mix potassium silicate with potassium hydroxide and sodium silicate with sodium hydroxide.
You could also use both at the same time.
____________________________________________________________________
Mixing transparent PVA glue with polyvinyl alcohol (PVA) and/or chitosan bioplastic with KOH (potassium hydroxide) can have various effects depending on the specific concentrations and conditions. Here are a few possibilities:
- Enhanced adhesive properties: Both PVA glue and polyvinyl alcohol are water-soluble polymers with adhesive properties. Mixing them together may result in an adhesive with improved bonding characteristics, such as increased strength or tackiness.
- Changes in transparency and flexibility: PVA glue is known for its transparency and flexibility when dry. Adding polyvinyl alcohol or chitosan bioplastic may alter these properties. The resulting mixture could become less transparent or less flexible, depending on the concentrations and interactions between the components.
- Gel formation: When PVA or polyvinyl alcohol comes into contact with potassium hydroxide, it can undergo a gelation process. The KOH acts as a cross-linking agent, causing the polymer chains to link together and form a gel-like substance. This reaction could lead to the formation of a gel when PVA glue is mixed with KOH.
- Structural changes and material properties: Chitosan bioplastic is derived from chitin, a natural polymer found in the exoskeletons of crustaceans. When chitosan bioplastic interacts with KOH, it can undergo structural changes and potentially dissolve or break down. Mixing chitosan bioplastic with KOH could result in a change in material properties, such as reduced strength or altered biodegradability.
It's important to note that the specific outcomes of mixing these materials depend on the concentrations, ratios, and other factors involved. The effects can vary significantly based on the specific formulations and intended applications. It is always advisable to conduct small-scale tests or consult relevant scientific literature before proceeding with large-scale applications or experiments.
Well, since I will be mixing everything with sodium silicate, I think it would be a good idea to not mix chitosan with it since it can literally decompose in the presence of such alkaline solutions.
But PVA with Polyvinyl Alcohol could stay, I guess.
Also, there are other Alkaline Polymers that could be used, such as Polysulfone or "Poly(ether sulfone) (PES)".
I don't know if "Polysulfone" and "poly(ether sulfone)" are the same thing, but I found on aliexpress some ads selling 100 units for less than 100 reais (20 dollars) as disposable syringe filters.
It would be a hell of a work to do, but it would be orders of magnitude cheaper than actual fricking nafion and platinum.
... It was this f3cking easy...
![]()
Edit²:
Dunno if I should have created a new project log or just make an edit to this one.
So, I asked a crapton of questions to ChatGPT and it gave me interesting suggestions.
Materials to enhance the Electrolyte:
(graphene and carbon nanotubes also work very well)
Determining the "better" or most efficient additives among the listed options depends on various factors such as the specific application, desired properties, and compatibility with the PES-KOH membrane. It is important to note that the effectiveness of additives can vary depending on the specific system and performance requirements. That said, here are some additives that are generally recognized for their potential to enhance PEM efficiency:
Ionic Liquid Additives:
- 1-Ethyl-3-methylimidazolium bis(trifluoromethylsulfonyl)imide (EMIM TFSI) is a commonly used ionic liquid additive known for its high ionic conductivity and stability.
Conductive Polymers:
- Polyaniline (PANI) and polypyrrole (PPy) are widely studied conductive polymers known for their high electrical conductivity and compatibility with PEM systems.
Plasticizers:
- Glycerol is a commonly used plasticizer that can improve the flexibility, processability, and ionic conductivity of PEMs.
- Propylene carbonate is another effective plasticizer known for its ability to enhance the mechanical properties and ionic conductivity of PEMs.
Fillers:
- Carbon nanotubes (CNTs) have shown promise as fillers due to their excellent electrical conductivity and reinforcement properties. They can enhance the mechanical strength and electrical conductivity of PEMs.
- Silica nanoparticles are commonly used as fillers to improve the mechanical properties and thermal stability of PEMs.
It's important to note that the efficiency and performance of the additives can vary depending on their concentration, dispersion, and interaction with the PES-KOH membrane. Conducting thorough experimentation and testing is crucial to evaluate the specific performance enhancements provided by each additive in the intended application.
Ceramic cloth, also known as ceramic fiber cloth, is a high-temperature-resistant material typically made from ceramic fibers. It is commonly used for insulation, sealing, and protection in various industries, including aerospace, automotive, and high-temperature applications.
While ceramic cloth may possess advantageous properties such as thermal stability and mechanical strength, its direct application as an additive or filler in polymer electrolyte membranes (PEMs) for fuel cells is less common.
In PEMs, the addition of ceramic cloth may introduce challenges and considerations such as:
- Porosity and Ionic Conductivity: Ceramic cloth is typically porous, which can hinder the ion transport and ionic conductivity within the PEM. Efficient ionic conductivity is essential for the performance of PEMs in fuel cells.
- Compatibility and Integration: Ensuring proper integration and compatibility between the ceramic cloth and the polymer matrix can be challenging. The difference in thermal expansion coefficients and mechanical properties between the ceramic cloth and the polymer matrix may lead to delamination or reduced mechanical integrity of the PEM.
- Manufacturing and Processing: Incorporating ceramic cloth into the PEM matrix may require specific processing techniques and optimization to achieve uniform dispersion and proper adhesion. This can add complexity to the fabrication process.
It is worth noting that the specific application and design of the fuel cell system can influence the feasibility and effectiveness of using ceramic cloth as an additive in the PEM. Research and development efforts are ongoing to explore novel approaches for incorporating ceramic materials into fuel cell systems, but currently, other fillers and additives may be more commonly used to enhance PEM properties in fuel cell applications.
If you are considering the use of ceramic cloth in a PEM for a fuel cell, it is advisable to consult experts in the field and conduct thorough testing to evaluate the compatibility, performance, and long-term stability of the ceramic cloth within the PEM system.
Me:
So, what it is the porosity Required for every part of an Alkaline Hydrogen Fuel cell?
Does the electrodes need to be microporous? How to achieve the required porosity?
Does the KOH electrolyte membrane needs to be porous? Microporous? Solid?
ChatGPT:
In an alkaline hydrogen fuel cell, different components have specific requirements for porosity. Let's discuss the porosity requirements for each part:- Electrodes: The electrodes in an alkaline hydrogen fuel cell typically consist of a porous material, such as nickel or nickel-based alloys. These electrodes need to be porous, specifically microporous, to facilitate efficient gas diffusion and allow for the electrochemical reactions to occur. The porosity in the electrodes provides a large surface area for the reactant gases (hydrogen and oxygen) to come into contact with the catalyst and participate in the electrode reactions.
To achieve the required porosity in the electrodes, various methods can be employed, such as:
- Sintering: This involves compacting the metal particles into a desired shape and then subjecting them to high temperatures to bond the particles together while retaining porosity.
- Coating: A porous layer can be applied to a solid substrate through techniques like electrodeposition or plasma spraying.
- Electrochemical deposition: This method allows for the controlled growth of porous structures by applying a current to a conductive substrate in a suitable electrolyte.
- KOH Electrolyte Membrane: In alkaline fuel cells, the electrolyte is typically a potassium hydroxide (KOH) solution. The electrolyte membrane in these fuel cells does not need to be porous. Instead, it is typically a solid, non-porous material that separates the anode and cathode compartments, allowing the transport of ions (OH-) while preventing the mixing of hydrogen and oxygen gases.
The KOH electrolyte membrane is commonly made of materials like polybenzimidazole (PBI) or polymeric blends, which provide good ionic conductivity without the need for porosity.
To summarize:
- Electrodes need to be microporous to facilitate gas diffusion and electrode reactions.
- KOH electrolyte membranes are typically solid, non-porous materials.
It's important to note that specific design considerations and variations may exist depending on the type and configuration of the alkaline hydrogen fuel cell being used.
Me:
Is there any kind of solution that I can mix with the carbon substrate to increase its strength? This carbon sponge sounds quite fragile.
Mixing resin won't make the electrode less microporous?
ChatGPT:You are correct that adding a resin to a carbon substrate can potentially decrease its microporosity. Resins tend to fill the pores and reduce the overall porosity of the material. This can hinder gas diffusion and affect the performance of the electrode in a fuel cell.
If you want to maintain the microporosity of the carbon substrate while still improving its mechanical strength, an alternative approach is to reinforce the carbon structure with fibers or additives that do not significantly block the micropores. Here are a couple of options to consider:
- Carbon nanotubes (CNTs): Incorporating carbon nanotubes into the carbon substrate can enhance its mechanical properties while maintaining microporosity. CNTs are known for their high strength and conductivity. They can be dispersed within the carbon matrix to provide reinforcement without significantly affecting porosity.
- Carbon fiber reinforcement: Adding carbon fibers to the carbon substrate can improve its mechanical strength. Carbon fibers are lightweight and have high tensile strength. By combining them with the carbon substrate, you can create a composite structure that maintains microporosity while gaining enhanced mechanical properties.
In both cases, the carbon fibers or CNTs can be mixed with the carbon substrate during the fabrication process. For example, in the case of a carbon sponge, you can incorporate these reinforcing elements into the sponge structure before carbonization.
By using these reinforcement methods, you can potentially strengthen the carbon substrate while preserving its microporosity, allowing for efficient gas diffusion in a fuel cell application.
It's important to note that the specific process and parameters for incorporating these reinforcements may require further research and optimization. The proportion and distribution of the reinforcing elements should be carefully considered to achieve the desired balance between strength and porosity.
Mixing sodium silicate with a carbon substrate, such as cotton, and subsequently subjecting them to high temperatures in a low-oxygen environment is a process known as carbonization or charring. This method can potentially result in the formation of a carbon-based material.When sodium silicate is heated, it undergoes decomposition and loses its water content, leaving behind solid silica (SiO2) particles dispersed within the carbon structure. The carbonization process involves the conversion of the organic material (cotton) into carbon, while the silica particles become embedded in the resulting carbon matrix.
The addition of silica particles from the sodium silicate may offer certain benefits:
- Reinforcement: The presence of silica particles can potentially enhance the mechanical strength of the carbon material, providing additional structural integrity.
- Templating effect: The dispersed silica particles can act as templates during carbonization, helping to maintain the porosity of the carbon material.
- Thermal stability: Silica particles can contribute to the overall thermal stability of the carbon material, improving its resistance to high temperatures.
However, it's important to consider potential challenges and limitations:
- Uniform dispersion: Achieving a uniform dispersion of silica particles within the carbon matrix can be challenging. Uneven distribution can lead to areas of higher or lower mechanical strength or porosity.
- Porosity control: While the addition of silica particles may help maintain porosity during carbonization, the overall porosity and pore size distribution will still depend on the initial structure of the carbon substrate and the carbonization process parameters.
- Compatibility with KOH electrolyte: The presence of silica particles in the carbon material may affect its interaction with the KOH electrolyte. It is important to consider potential changes in electrochemical performance and stability when evaluating the material for use in an alkaline fuel cell.
In summary, the addition of sodium silicate and subsequent carbonization can potentially modify the properties of the carbon substrate. However, achieving the desired balance between mechanical strength, porosity, and compatibility with the fuel cell system would require careful experimentation and optimization. It is advisable to thoroughly test the resulting material and evaluate its performance in an alkaline hydrogen fuel cell setup to ensure its suitability and long-term stability.
So yeah, although pure silica nanoparticles are as expensive as gold on the internet, you can literally just heat it up in order to make it useful for the entire Alkaline Hydrogen Fuel Cell.
And yes, you would want to do it in order to make it useful, since pure sodium silicate is soluable on water, and since the result of hydrogen and air reaction is the generation of water...
Anyway, I don't remember if I already posted this here, but I saw a guy making a carbon sponge out of bread exactly the same way ChatGPT suggested.
So I was thinking on literally mixing all the ingredients for the Alkaline Hydrogen fuel cell with bread dough, put it on the oven until it actually becomes actual bread (with carbon fiber, sodium silicate and all that stuff that you don't wanna eat), cut it into slices of your choosing and then use the process shown above to convert to electrodes.
So yeah, let's just take a moment and appreciate how I literally came up with an Hydrogen Fuel Cell that you actually bake in the oven with bread.
![]()
Another method that I found is a little more dangerous and I still didn't check if it would alter every ingredient or anything like that, but if you mix sugar with sulfuric acid, you get carbon sponge.
Mixing house sugar (sucrose) with sulfuric acid does indeed result in a carbonized material, commonly referred to as "black snake" or "carbon snake." This reaction is often demonstrated in chemistry shows due to its visually interesting and dramatic nature. However, it's important to note that the resulting carbonized material may not be suitable or optimal for use as a microporous layer in an alkaline hydrogen fuel cell for several reasons:- Purity and impurities: The carbonized material obtained from the sugar-sulfuric acid reaction may contain impurities from both the sugar itself and the reaction process. These impurities can affect the material's performance and stability in a fuel cell.
- Porosity control: While the carbonized material may have some inherent porosity, the control over the porosity and pore size distribution may be limited compared to specialized materials designed for fuel cell applications. The porosity of the carbon sponge may not be optimized for efficient gas diffusion in a fuel cell electrode.
- Chemical compatibility: The carbon sponge obtained from sugar and sulfuric acid may not be chemically compatible with the alkaline electrolyte, such as KOH. The presence of impurities or residual sulfuric acid remnants can lead to chemical interactions and potential degradation of the material in the fuel cell environment.
- Mechanical properties: The mechanical strength and durability of the carbon sponge produced from sugar and sulfuric acid may not be sufficient for long-term operation in a fuel cell. Specialized carbon substrates and reinforcement techniques, such as carbon fibers or nanotubes, are typically used to enhance the mechanical properties of fuel cell electrodes.
While the sugar-sulfuric acid reaction produces an intriguing carbonized material, it is generally more suitable for educational purposes or as a novelty demonstration rather than as a functional component in a fuel cell.
For optimal performance and stability in a fuel cell, it is recommended to use commercially available materials specifically designed for fuel cell applications or to explore other established DIY methods that offer better control over the desired properties, such as those mentioned earlier (e.g., carbon nanotubes, carbon fibers).
-
Project Log 55: DIY Hydrogen Fuel Cell.
06/18/2023 at 21:39 • 0 commentsSunday, 18/06/2023, 18:25
Soooo...
I don't even know why I'm writting this project log, I really don't think that I will have the money, nor the mental fortitude and determination to go through with this project, but for some reason, I keep going forward.
And the project log of today is about Hydrogen Fuel Cell Generators.
So, there are a crapton of hydrogen fuel cell types, and all of them have pros and cons.
The simplest, more efficient and easiest of them all is the Proton Exchange Membrane Fuel cells.
You simply put in sequence a current collector, an electrode (cathode or anode), then the Proton exchange membrane, then another electrode (cathode or anode), another current collector and bam, you have a fuel cell.
The problem is that EVERY SINGLE PIECE of EVERY TYPE of hydrogen fuel cells are expensive as fricking hell!!!
I thought the most expensive part was like, the platinum or something, but no, even if I was made out of gold I wouldn't be able to pay for something such as a fuel cell.
Nafion, the most common proton exchange membrane and commercially available costs 200 reais (40 dollars) for every 10 square centimeters!!!
A *single* membrane costs 200 reais (40 dollars) for a single cell. There are hundreds, if not thousands of fuel cells on an Hydrogen Fuel Cell generator.Of course, the list goes on and on for every type of fuel cell, the Solid Oxide Fuel Cells are basically the same thing, but with ceramic materials replacing each part and running at 200ºC to 600ºC (or even more) of temperature to reach desirable efficiencies.
But my dude, even the ceramic materials are expensive as hell, the electrolyte/"proton exchange membrane" of a solid oxide fuel cell, the "yttria-stabilized zirconia (YSZ)" or whatever the hell this means costs around 200 reais (40 dollars) a single 5cm by 5cm square piece with 0.1mm of thickness!(by the way, I saw some videos where people simply used Acrylic plastic as a proton exchange membrane on some home-school projects, but I don't know how well that would be for a fuel cell)
__________________________________________________________________
Obviously, there are some ways of "getting around of it", but I doubt any of these are as efficient as the commercially available options.
However, I don't want to be super efficient, I just want to be as efficient as a combustion engine (30% to 40% efficient), but the more I research about the subject (on google, lol), the more I understand that it really isn't that simple, and even a 30% efficiency from homemade materials is just asking too much.
Well, the best video I found about making a homemade proton exchange membrane was this one bellow. Although half of the video is him throwing chemical stuff after chemical stuff on the cloth in order to clean it and make it adhere to the proton exchange resin, which is the whole "heart" of the stuff.
One could use hydrogels to suspend the resin or something like that, but I don't know how an hydrogel wouldn't simply go down the drain in a hydrogen fuel cell...
This other video, however, kinda made me excited for the possibilities of an entirely castable hydrogen fuel cell.
You see, an "ion exchange membrane" is the same thing as a proton exchange membrane (somehow), and since you can use regular cement for it, maybe you could use refractory cement to make the entire thing and work at the same insane conditions of a regular Solid Oxide fuel cell.Again, you "could", "maybe", the resin is the reason the membrane works, and the high temperatures may destroy it, even inside the brick.
(By the way, the idea would use resistor wires such as Kanthal and Nicrome, these are relatively cheap and chan reach thousands of degrees with relatively low wattages)
In the video the guy mixes the powdered Nafion plastic and mixes it with cement in order to use the cement as a single membrane in a solution of 3:1 of nafion and cement respectively.
However, even then you need a significant quantity of nafion and/or proton exchange membrane.
As far as I know it, clay pottery can be used as some kind of membrane in batteries, such as the clay pot battery. And the same can be said about plaster of paris.
Although I don't know how well it would work as a proton exchange membrane, neither as a hydrogen fuel cell membrane. Which is relevant, since you will be making water out of the reaction, and a plaster of paris membrane would just melt in the presence of water.And the more I look into Hydrogen Fuel Cells, the more I get confused, because a lot of them are done in a really specific way. Some may have gas diffusion layers (GDL) for some reason, and others may have bipolar plates and current collectors, which I still don't understand why you would need both.
![]()
![]()
Why a gas difussion layer? Why a microporous layer? Aren't the cathode and anode already current collectors? What?
__________________________________________________________________
... In any way, you can use Nickel and/or Iron as the catalyst in the electrodes and maybe mix other substances that may be used in other types of fuel cells, such as silica, gadolinium, zinc oxide (known as zirconia), cerium (glass rated polishing powder), vulcan (carbon black, an specific type of carbon that is more electrically conductive), sodium silicate (for better heat resistance) and, the best of all, homemade graphene.
Yes, that "blood graphene" that is made with milk, with the proteins present on milk, more specifically. The guy made it using Whey protein powder and later made a bioplastic that was basically indestructible.
And graphene is said to be a great catalyst support material and an even greater reinforcement for concrete. Although, for the catalyst support I would guess that you need a lot of funky wunky chemistry stuff to make it work.
__________________________________________________________________
So the idea would be to take a really deep/long pot of any kind of material to be used as the casting mold.
Then, you would use Plaster of paris as the spacer for some parts, such as the gas parts, the tube connections and so on and then melt it with water after everything became solid.
Basically you would put the screw hose entrance on the extremities of the inside of the mold, put the plaster of paris already casted in a 3D printed shape (or simply carved shape) with or without the metal parts and then, after the whole thing is rock solid, you take out of the mold and melt the plaster of paris with water, which will leave the channels behind.
So, the order of casting would be:
Current collector cement mixture > Negative plaster channels > Electrode cement mixture > Proton Exchange membrane cement mixture > Electrode cement mixture > Negative plaster channels > Current collect cement mixture.
![]()
(not a cement fuel cell, but a valid example)
Every step you would obviously wait until the cement mixture of every layer is dry, which, I suppose, you would have weighted before hand so they are as even as possible and as thin as possible. Plus, what will be considered the cathode and anode will depend on which part you insert the oxygen/air and hydrogen gas.
The thing is: I don't know what should be used as current collector, or if using graphene from graphite on everything would cause short circuits (or dead short, or whatever it is called in english) everyhere, or what should be the cathode and anode (and oxygen/hydrogen channels respectively).
I'm suspecting that, although the idea would be great to simply cast an entire hydrogen fuel cell, you would still need gaskets or cement insulant/separation layers to avoid short circuits on the entire system.
I also don't have the money to buy everything necessary to test it out, in this case, the high pressure hydrogen gas tank.
I was thinking on buying a 1 liter 200 bar gas tank, connect to a complete cell and see how much electricity it would generate, and then I would more or less know the efficiency, since 1 liter of hydrogen at 200 bar (or any kind of pressure) would have an x value of electricity in total, and the amount of electricity you where able to generate from this liter would be y value, and thus, show you how much you've lost during the process.
However, I don't feel like I have the skills to pull this off.
Yes, it is a "simple" project, and yet, I don't feel confident to build and test it with all the necessary components... Just imagine an entire mech...
... Or I'm just being lazy?
... Or overly insecure due to my constant failures?
_____________________________________________________________________
Edit¹:
I just calculated the value of everything and basically, I would need around 50 reais (10 dollars) for every part, and since I would need around 10 to 14 components to make the cement hydrogen fuel cell, I would need around 500 to 700 reais (100 to 150 dollars).
Even in the "cheap", I still don't have the money to even try to make the dang cement hydrogen fuel cell.
The components would be:
- Graphite powder for graphene
- The proteins for mixing with the graphite for the making of graphene, such as the Whey powder that contains the bovine serum albumin (I only found egg albumin for food recipes) and lactoglobulins (that I also couldn't find pure), although I couldn't find many Whey Powder that explicitly said they contained these two proteins, the best bet would be "concentrated milk protein".
- Cement and/or refractory cement.
- Sodium silicate to make the cement even stronger and heat resistant, however, I do not know how much it would affect the performance/efficiency of the overral fuel cell.
- Nickel powder for the catalyst, however, I'm curious if super elastic Nitinol wire (an alloy with nickel and titanium) would work, these are cheaper than they sound (but the iron/nickel powder definitely aren't).
- Iron powder, because like nickel, iron is also used as a catalyst.
- A short Platinum or platinum coated wire for around 50 brazilian bucks (10 dollars), it won't be enough for the entire thing, but it could be somewhat useful.
- PVA glue with Polyvinyl alcohol (it won't work without it) for the proton exchange membrane.
- Maybe pure Polyvinyl alcohol to add extra to the mixture.
- Citric acid for the proton exchange membrane.
- Chitosan powder to mix with PVA, chitosan is a bioplastic that is normally sold as tea/natural treatment, but there are tons of papers/articles showing hydrogen fuel cells made using it, so in my smooth brain this made me think:
"Proton Exchange Membrane with PVA and citric acid + chitosan dissolved in PVA (because it needs to be dissolved in something) = better proton exchange membrane. - Conductive ink to be mixed in the electrodes for better electric conductivity between cells.
- PTFE insulating tapes for electrical insulating inside the thing.
- Kanthal resistor wire to test if the stuff would peform better at higher temperatures.
- Rust/oxidation resistance conductive wire to be used as current collectors in the cells, the cheapest I found was for electric fences, which are constantly exposed to the environment and need to keep its conductivity.
- Also, I heard that Polyimide (kapton) plastic and/or silica gel could be used as a high temperature Proton Exchange Membranes with limited efficiency compared to properly made PEM's...
But it could be tested, if you have the money.
All of the components are around 50 reais (10 dollars), some are just 20 reais (4 dollars), others are above 80 reais (16 dollars).
One or another are literally 100 reais (20 dollars) or more, depending where you buy it.
Also, if you where to make a really hot cement fuel cell, like 600 ºC or something like this, I would suggest to use heat resistant ceramic one-way valves (or "check-valves") to avoid the gases to go back from where they came from and go kaboom; Oh yeah, with so much heat you can just instantly combust your fuel. :|
And even a shell around the fuel cell made out of refractory cement.The holes/channels could be made the same manner as I talked above the Project Log, with negative plaster cast and so on, so you could protect the rest of the equipment...
This also means that I can't really even start/complete this project, since it would be so fricking expensive in all aspects...
_____________________________________________________________________
Also, I saw this interesting "swiss roll fuel cell" that I thought it was quite interesting, I don't remember what fuel it uses, but It is not purely hydrogen and oxygen.
![A Swiss-roll liquid–gas mixed-reactant fuel cell - ScienceDirect]() The article: "A Swiss-roll liquid–gas mixed-reactant fuel cell"
The article: "A Swiss-roll liquid–gas mixed-reactant fuel cell"I also saw this one made out of ceramics, I wonder if it would work with this cement fuel cell.
Article: "A “Swiss-Roll” Fuel Reformer: Experiments and Modeling"
Maybe you could put the cement in a cloth and roll it around before it dried out? I mean, they do that for concrete cloth...
-
Project Log 54: Just one last try.
06/13/2023 at 23:35 • 0 comments13/06/2023, 20:31, still Tuesday.
Soooo....
Anyway, I was having second thoughts about the exosuit/mechsuit.
So, you basically have two options with the power of the exosuit/mechsuit:
- You have 900 watts of power, with 300 newton meters of torque and 30 rpm, with 300 kg of force that will be lost in the distance from the axis of rotation to the point of the limb, giving you a maximum of 100 kg of lifting force . However, the legs would not be able to support the user's weight + the weight of the load.
- You have 900 watts of power, with 3000 newtons meters of torque and 3 rpm (3cm per second), with 3000kg of force that will be lost in the distance from the axis of rotation to the limb, giving 1000kg of lifting force, but in a meticulous slow speed.
However, if you convert the RPM of a 1cm diameter shaft into linear velocity, you will obtain 1.5cm per second and 60,000kgfcm of torque (30,000kgfcm if it is 2cm in diameter, with 3cm per second of speed).
However, if you change the diameter of said shaft to 4 cm, and therefore the linear velocity to 5 cm per second, the rpm to 15, and the torque to 600 Newton meters, you will be able to lift 3,000 kg, and therefore 1,000 kg .I say this because 5cm per second is roughly how much your biceps move to fully lift the arm (I think), *if* I directly translate that to the mechanical arm, it would be able to lift 1 ton with 900 watts of power per " member of the Stewart platform".
I would keep the same mechanisms like the winch/winch linear actuator and so on.
![]()
This means that the mech with 1 ton of lifting capacity would only use 900 watts of power.
Of course the legs would need to lift 3 times that, so if you add the 900 watts of the arms and torso, that would be 2700 watts of power in total, plus 2700 per leg, that would be 8100 watts in total, giving the 10.8 horsepower needed for make this move.
If you add an extra 1 ton to the legs to lift the whole thing, each leg will consume about 5,400 watts of power, giving 13,500 watts in total, which would give 18 horsepower.
Of course, the weight would be distributed over the whole body, i.e. 900 watts on both arms to lift 1 ton, plus 900 watts on the torso and 5400 watts on the legs, giving 7200 watts in total, i.e. I would only need 9,6 horsepower.
And since, I assume, I would lose around 20% of power due to inefficiencies, I would need 11.52 horsepower, or 8640 watts.
Around 2 extra horsepower (1400 watts) to compensate.
I hope I did the calculations correctly this time.
And yes, I feel guilty that I didn't keep trying, it's almost an obsession.
_____________________________________________________________________
Edit¹:
Just now I noticed that I inputed 30 rpm instead of 15 in the calculator, if it was 15 rpm, it would give around 3cm per second of linear speed.
This means that, again, I misscalculated.
If it was 30 rpm instead of 15, the wattage would double.
So, instead of 900 watts per limb and 9.6 horsepower in total, it would be 1800 watts per limb and 19.2 horsepower in total.
And one would need 3.84 extra horsepower to compensate inefficiencies, assuming these are only 20%.
Still, it would be 5cm per second, it would move really slowly.
It would even be worth the trouble?
_____________________________________________________________________
Edit²:
By the way, the same can be applied to the reverse:
with 10cm of diameter, 30rpm and 300 newton meters, you would only be able to lift 300kg with a speed of 15 cm per second, and thus, only 100 kg of force at 3 times the length of the limb.
You would need 10 times more torque, and thus, 9000 watts of power per limb in order to achieve 3000 kg, and thus, 1 ton at 3 times the length of actuation.
I just woke up and all the calculations are messy in my brain.
In the torque calculator, it states that at 5cm of radius, and thus, 10cm of diameter, one would be able to lift 30,000 newtons (3,000 kg) with 1500 newton meters of torque, which would give 15cm per second of linear speed at 30 rpm.
Which would need 4713 watts if you inserted 1500 newton meters and 30 rpm on the horsepower calculator.
_____________________________________________________________________
Edit³:
I totally forgot about the mechanical advantage of the pulleys/winches/hoists in the image above, but while calculating the mechanical advantage (aka putting into online calculators), I got a little bit confused with the final result.
You see, if I where to put 3000 newtons (300kg) of force in a 20 cm long lever, which would be a 40cm diameter disk/pulley/hoist, I would be able to lift 30,000 newtons (3000kg) in a shorter 2cm long lever (a 4cm diameter disk).
However, when I insert these values to a torque calculator, it gives me 600 newton meters of torque, with 30rpm, would be 1800 watts of power.
But if I put 1200 kgfcm in a kgfcm to newton meter converter, I get 120 Nm of torque, which with 30rpm, would give 300 watts of power.
Meaning that if I attached a 4cm diameter electric winch to the tip of a 20cm long lever/40cm diameter disk with a rope, I would need actually just 120Nm of torque to lift these 3000 newtons (300kg).
So, or I'm misunderstanding something and reaching to the conclusion of 300 watts of power per limb, or the torque calculator is correct.
This bugged me all day, but I forgot an essential part of the problem: the rpm through the reduction ratio.The 4cm winch drives a 40cm winch with a reduction of 10:1, so, for every 10 rotations of the small one, the bigger one would rotate 1 time.
And so, the torque would multiply 10 times also, so this means that I would still need 60 Newton Meters, not 120 and an RPM of 300, not 30 to be input on the bigger wheel using the smaller wheel.Meaning that in the entire system, there is still 1800 watts being used and transformed through the reduction ratios.
The way I was interpreting this was that I would need to input 600 newton meters on the outside of the outer winch/hoist, which such number is the output of the mechanism.
-
Project Log 53: You know what, I think I should give up.
06/13/2023 at 20:09 • 0 commentsTuesday, 16:39, 13/06/2023
Welp, sorry for my lack of content, I feel like I'm merely doing a "let's do it, let's do it, let's do it" and doing nothing monty python style.
Well, there was a giant ass text here on how I would make an electric motor from scratch, but screw this.
_____________________________________________________________________
.... Argh, forget it, I think I should switch to hydraulics, electronics with 100+ amps is literally a death sentence.
_____________________________________________________________________
I don't know what to do, to be honest.
I feel like I should just give up, but I also don't think I should give up...
... And the reason I did in fact, jumped into this mess is because I wanted to do it anyway...
The exoskeleton needs 900 watts per "stewart-platform-limb" needing 6 horsepower in total (4500 watts). I would need 10 times more for a mech with 1 ton of lifting force, 60 horsepower.Of course, assuming the speed of movement is 30 rpm, if not, it can change drastically.
You would need 10 times less power with 3 cm per second, but what one would be able to do with 3 rpm of speed?
>Says mechs are not viable and expensive>Tries to make one anyway
>Gives up because they are not viable and expensive
![]()
_____________________________________________________________________
Well, it sure was fun tweeking with this "puzzle" of a project.Maybe in a few years I will just appear with a full mech out of nowhere, lol
... Kidding it would probably be easier to make a micro fusion reactor than make a viable mech that is cheaper than a car. -
Project Log 52: I accidentally made the mech viable (but slow as hell)
06/11/2023 at 16:32 • 0 comments(this project log is looking like a schizophrenic conversation with myself, bruh)
Project Log 52: 3D modelling Attempt 7.
(I'm previously writting this on a notepad because I'm testing if not creating a project log helps my anxiety. It is ironic how first the project logs drafts helped put me on a hurry to finish it, and now these are a source of anxiety).
![]()
__________________________________________________________________________
I wish I had the money and the contact to talk to someone specialized on this thing.
Also, I was really considering making a loan with a bank in order to hire someone and finally finish this stupid project.
Dunno how I would pay the debt, but hey... It is an idea...
A friend of mine suggested me to make a Kickstarter (or similar websites) page with this project... But I tried before, and nobody gave a damn.I would need a lot of followers and a lot of money to market the project...
I'm really starting to give up on this idea, I'm nowhere near this completion, but I hope I inspire someone more competent than me to make this a real thing...
__________________________________________________________________________So, the winch mechanism I thought first was to use the same logic as a pulley, where a smaller pulley pulls a bigger pulley. The difference would be that the cable of the winch would be screwed into place onto the pulley.
The problem is that this is a 10:1 ratio pulley-winch, so it would have to make 10 rotations in order to achieve some movement.
It wouldn't be a problem if I didn't think on attaching both sides of the arm to the same screw, instead of moving, it would tentionate the cable, since it can't move.The simple solution I thought was putting two diferent winches, one for pulling the forearm/limb upwards and another on the opposite side pulling it downwards.
In order to achieve that motion, I thought on connecting both winches with a 1:1 gear ratio, since each gear will naturally rotate to the opposite end, maybe it would avoid such problem.
However, I'm still afraid about the gear's teeth braking due to the loads experienced during use. I don't quite know a possible solution other than use Sprockets, the problem is that sprockets rotate at the same direction.Maybe I could "solve" that by simply inverting the direction of the winches, one can wind while other unwinds while rotating at the same direction.
And well, as much I made it look like I was completly done with sprockets in general, I think that maybe it wouldn't be much trouble in this case, since the transmission is 1:1 instead of 10:1. :)Also, I know that one could simply make the rope longer to simply avoid this kind of problem, but I'm just afraid of the energy losses with winches and pulleys.
Winch mechanisms are really, really inneficient due to friction losses with the rope.__________________________________________________________________________
Also, I was thinking on making the 3D model of the telescopic linear actuators with Stewart platforms like the Hardiman, like I talked about in Project Log 49.
First, I thought on long and telescopic Stewart platforms for each limb, arms, legs and torso.And maybe add some kind of "elbow", just imagine a tube at the end of the Stewart Platform instead of a simple disk.
The platform would be controlled with both a simulation and simple potentiometers, the idea is basically tell the machine to follow and avoid the position points of the motion capture suit.
Something among these lines:
And a motion capture suit like this one.
Or this one.So, maybe, it would be easier to control, program and make it work. It could even retract to a small state (since the actuators are telescopic) and be easier to transport.
Not to mention that all the weight would be somewhat distributed to all actuators at once.I thought this was interesting, it has a lot of range of movements, more than a normal stewart platforms:
__________________________________________________________________________Also, for some reason pinterest is showing me a lot of images of the anime "86: Eighty Six", which I don't really know the plot, but for some reason people pilot these cool spider mechs because they live in mountainous regions.
![]()
(forget the gun on it tho)I wonder if it would be possible to make it work with reciprocating actuators.
If I'm not being clear, just imagine this velociraptor robot, but instead of being a velociraptor, it is a spider robot:
This other racing octopod is kinda interesting too, and it is more or less the same thing:
I guess it could be possible/useful for each limb/joint to have some kind of elasticity/dampening, so it could adapt to the differences in the terrain without needing too much processing power.
Of course, this is due to its repetitive and almost unchanging cycle of movement.
Maybe one could even use a car transmission on such system? hummm..."Why you don't use the same system on the exoskeleton/mech suit?"
Good question.
I don't know. :|
I really don't know how to make such system to work in a exosuit or mech... I keep forgetting about trying this out...
Maybe I should at least give a try... On 3D modelling... I guess...
__________________________________________________________________________
You know what? Screw this, i'm going to make the Telescopic Stewart Platform exoskeleton.
It is the most efficient and the simplest one.
There is no reason to make a biomimetic exoskeleton if the entire exoskeleton needs 20 horsepower of energy.
In resume, imagine the following (remember to draw this):
There is a stewart platform, and on top of it, instead of an disk, there is a tube.
The tube will act like a limb, you will be able to put your arm inside the Stewart Platform and the tube itself.
Of course, the Stewart Platform can rotate into directions that could easily break the human body, so it would be wise to put a limiter (like a piece of wood/steel) that blocks the thing from breaking the human body.
Also, one could make the stewart platform stay completly reverted and then put it as its neutral state, so even if it goes against the human body, it will be blocked by its own limits.
(also make a drawing of that)
So, I just noticed that when the Stewart Platform is rotating on its own axis, only half of the actuators actually move, which would mean that I would need the equivalent of twice the power in each limb... At maximum.
Assuming maximum horsepower/watts per limb is +/- 2 horsepower (1800 watts), and that there are 5 limbs, then it would consume in total 10 horsepower or 7500 watts, and since each limb needs twice the value, it would require 20 horsepower or 15,000 watts in total.
... Which is concerning...
Of course, this is the maximum wattage, not that these would be in full wattage all the time... I would say "only half of the legs/arms would use this value per step", but this isn't quite that accurate tho... Between steps you need some effort to put your free leg forward for the next step.
Well, since we have 4 horsepower per joint, I need to divide 3600 watts by 6, or even 9, depending on the type of the stewart platform used.
Which would mean that I need 600 watts per actuator in the case of 6, and 400 watts per actuator in the case of 9.
Well, the problem is that even in these relatively small values, light electric motors and/or drone motors have a *lot* of RPM, meaning that I would need a *lot* of gear reduction for the linear actuators.
... And I really can't find a cheap motor for these values, I'm almost considering putting that 90kv electric motor that I showed in the previous project log...
... Also I think I should give up on the idea of telescopic actuators, because I don't think I would really need *that* much range of movement. And specially because they are too bulky. I mean, one is kinda okay to have, but I need 6 to 9 of these in a single space, which... Can be funky.
... I Think I should go back to hydraulics in this case, of course, not with 2982389329823 PSI, but something in the middle, like a hydraulic motor that drives the linear motor with a pulley system.
You know, like this thingies, but only one stage, or maybe two.
I say this because it is easier to calculate a rotary hydraulic motor than a linear one.
And the reason is because I don't really think that the gears would actually be able to withstand all the loads on themselves...
But that's just a thought tho...
I mean, I still would do that 10:1 ratio two times with the cycloidal gears and then again with the pulleys/winches.
__________________________________________________________________________
I was looking for hydraulic motors, and more or less, I need 200 newton meters of torque, and the ones that can achieve 400 newton meters are like, 1000 reais (200 dollars).
All of that without gear reduction.
Of course, I can always just copy these machines and so on, but this makes me concerned on how much force these actuators would *actually* be able to withstand...
![]()
Well, for what I could calculate, I would need 175 bar of pressure and 2.4 liters per minute for every, and since there is 30 motors, I would need 72 liters per minute, which some hydraulic pumps (more specifically one that costs 550 reais [110 dollars] can achieve) on the cheap would be able to deliver.
![]()
The problem is that I would need around 15 horsepower in order to supply the hydraulic pump, not mentioning the hellwork of tubes and pipes I would need to do in order to distribute all the hydraulic oil to every actuator.
Which is a little better than the completly electric one, that would require more or less 20 horsepower in total.
... Which² is weird as heck... How this is using less power than the electric one? I'm missing something?
Also, the hydraulic motors *look* really long, I'm afraid they would just be too bulky, but I asked for more information on the articles I found on the internet.
__________________________________________________________________________
Also, I tested inputing these values on a linear hydraulic cylinder calculator, based on actual hydraulic cylinders for 2 tons of weight, with 175 bar and 2.4 liters per minute and it would achieve 2 tons of weight and take 9 seconds to fully actuate 30 cm of length.
And assuming that it only needs to travel 5cm, it would take around 1.5 to make your arm fully move while the other hydraulic motors would take 0.5 seconds for that.
Hydraulic cylinders are crap (or I'm just bad at math).
Well, I tried again, this time I converted rpm to velocity and torque to force.
The way I did it was just searching on google a rpm to speed converter, lol.
Then, I took the torque calculator and inserted torque and distance before force, which gave me a force of 50,000 newonts (5 tons).
https://www.omnicalculator.com/physics/torque
So, assuming that a 10cm wide axis of rotation of an electric motor or an hydraulic motor rotates at 30 rpm, I would have 15cm per second with a force of 5000 newtons (or 500kg).
So, if I translate that to a hydraulic cylinder, I would have... To deliver 11 liters per minute per cylinder at merely 40 bars of pressure.
Assuming that the 80 liters per minute hydraulic pump supports exactly 8 cylinders per minute, it would require around 3.75 (or 4 to round up) of hydraulic pumps to deliver the necessary fluid flow, and around 16 horsepower to deliver it.
However, if I assume again that the axis of rotation is 1cm of diameter, then this would change to: 1.5cm per second and 5 tons of force.
Which would need 1.4 liters per minute per cylinder and 157 bars of pressure, which would require around 42 liters per minute in total and around 13 horsepower (9750 watts) of power.
Which makes me think that maybe the previous calculation of merely 15 horsepower may be wrong, since it needs a lot of torque also... I *think*, I asked some sellers and they just say "15 horsepower is enough to make it work" in a general manner... Not saying they are lying, they simply may not understand their products as much as the clients.
Dunno about the EUA but here in brazil, sometimes you need to be extra sure to ask/talk to sellers because some times they literally don't know what they are selling, so just say things like: "sorry pal, it is just written 12 volts on this electric motor, dunno what 'watts' and 'brushless motor' means tho".
__________________________________________________________________________Alright, I wasn't still convinced on giving up on direct electric motor with gearbox in order to go to hydraulic cylinders. So I asked around.
... And the answer is no.
You see, in my innocence I completly missed the point (as always [god, if I was an actual engineer student, so much trouble could have been avoided, dang]), if the torque is 500 newton meters, then converting it to other units would give 5000 kg of force per centimeter.
Needless to say, even steel wouldn't be able to withstand such massive weight in a mere 1cm radius pin, don't you think?
Well, while I was writing this I thought the final result would require some crazy stuff, like a bar with 40cm of diameter or something.
But some people suggested that I would need only 3 to 8 cm of diameter :|
__________________________________________________________________________
Also, I found *another* problem: the length of said hydraulic pistons. The one I found would have 46 cm of length *unactuated*.
They are *too* long (hehe) and wouldn't allow for full body movement.
I was thinking that telescopic actuators would be "the only way" of making this new system possible, but I was super duper wrong. A simple short linear actuator system is more than enough.
__________________________________________________________________________Well, just now I noticed that I've made a mistake (AGAAAAAAAAAAAAAAAAAAAAAAAaaaaAAAAAAAAAAAAAAAAAin), I don't need 500 newton meters per actuator, because that's the 1800 watts torque in total, not the 600 watts per actuator.
So, yeah, I basically calculated a exosuit that lifted 5 tons per actuator, just the legs would be able to lift 30 tons each. :|
It would 1cm per second, but still 60 tons.Did I f8cking made a viable exosuit/mech that can lift 60 tons by f8cking ACCIDENT...? :|
I'm so confused. I hate myself. I need a fricking engineer to help me out, for gods sake.![]()
Ok, I don't need 5 tons, I just need 1/3 of that (1800watts/3 = 600 watts), so I would need around 2000kg of force or 200kg force if it was at a 10cm radius.
Well, with the new specifications, I would run in a similar problem to the previous one: liters per minute.
If I was to convert the 10cm radius of the winch/pulley mechanism, I would have around 15cm per second, which would require 11 liters per minute for all actuators, and since there are 30 of them, I would require 330 liters per minute, 3 pumps at 15 horsepower, around 45 horsepower in total.
If we take at best 3 cm per second, then I would need 3.7 liters per minute, which would give around 100 liters per minute at 15 horsepower, which is possible, but barely fast enough to fill every actuator.
Also, I would probably just be able to slowly walk (I think).
So... Since I don't need *that* insane amount of power in total, I think it is safe to say that instead I should keep up with the electric ones.
Of course, I could just put wheels on it and make a mech, but let's make it an exoskeleton first, shall we? :)
Now I'm actually excited! After all, Mechsuits are *probably* viable. :)
__________________________________________________________________________
Actually, I was looking here, and I think it could be a good idea to use the 5 ton hydraulic cylinders instead of the 2ton ones, but only using the 5 tons for maximum 2 tons.
I say this because the pressure required to make a 5 ton hydraulic cylinder to lift 2 tons is "only" 60 bar, around 6 MPa.
I would need 5.6 liters per minute per actuator, but I would only use around 5 horsepower for such pressure.
I would need around 168 liters per minute for every actuator, but again, I could use another hydraulic pump with 5 horsepower and stay at 10 horsepower in total instead of 15 or 45.
Also, this could mean that the composite material that I will use won't be put in its limit all the time.
I tried to check the energy required for a 10 ton hydraulic cylinder with less pressure in order to lift 2 tons at same speed, but even then it would use around 10 horsepower to feed 14 liters per minute for every actuator (420 liters per minute in total), although it would only need around 25 bar of pressure.
... Wait, what if I used the 10 ton hydraulic cylinder for lifting 5 tons in an *actual mech* instead of the exosuit?
I would need around 9 liters per minute for 3cm per second and 100 bars of pressure, this would be 270 liters per minute, which I would need around 2 to 3 pumps with 10 horsepower each, giving 30 horsepower in total.
If it was 2 tons instead, it would be around 40 bars of pressure.I was also thinking on making hydraulic accumulators, since you obviously wouldn't need that much force on the arms, probably on the legs only.
__________________________________________________________________________
Also, kinda made a mockup of the linear actuators (a paper tube) just to see if my body would have enough freedom of movement to move and well, it mostly okay, unless I try to touch my own shoulders with the oposing arms. Basically, unless I make a telescopic actuator in the chest, the structure of the actuator won't allow me to do that.
__________________________________________________________________________
Also², I'm starting to regret even considering using hydraulics, because bruh... How I will fit so many hoses, variable controls, oil and a combustion engine in this thing...?
__________________________________________________________________________
Also, bad news: the pulley drive system logic doesn't work for pulley mechanisms.
Basically. I was thinking on using the compound pulley mechanism to make the linear actuator, but it only works by the number of pulleys that these kinds of systems have.
So this winch driving a compound pulley mechanism that lifts a weight, in this case, a linear actuator, will only have a 2:1 reduction ratio.
![]()
Now I have to figure out how to make this damn thing work properly.
![]()
Every pulley you see in the image loses 5% to 10% efficiency. :|
But comparing to my system, this looks like the 1:6 reduction ratio version.
![]()
There is also this picture showing that pulleys have fulcrums and mechanical advantages.
I think I would need to make a conventional reduction mechanism, with a small input driving a bigger input slower, but stronger.
I was thinking on actually a winch, although winches have limited travel, I could "just" make the length of the winch longer enough to allow the full actuation of the system.
Also, I will put a crapton of lubricant is these goddang pulleys, because, gawd, These will definitely need it...
__________________________________________________________________________I was watching this video and it made my question (again) if I really shouldn't change to hydraulics, because the plastic gearbox simply exploded with "mere" 50 newton meters of torque, I will be using 4 times that value on each actuator...
So, the guy didn't care about efficiency too much, because that wasn't his objective after all. But you can see from time 0:54 that the final torque should be around 200 newton meters.
However, he only achieved around 50 newton meters, so just by the torque alone you can see he already lost 75% of the energy during the process.
Of course, I'm not using his gearbox, I settled for using the James Bruton cycloidal gearbox with 10:1 ratio that seems to be more solid, and I will also use a winch mechanism with also 10:1 ratio.
But I can't help but feel like I'm missing something in this process...
__________________________________________________________________________This is me from the future, the fact I was missing is that by making the diameter of the winch/hoist/pulley mechanism, it loses 10 times its force.
So it wouldn't lift 30 tons or 60 tons, each actuator would have 200kg of force, so 1200kg per actuator in total, and with the mechanical loss from being at 1/3 of the distance, I would be able to lift 400 kg.
Of course, if I go back to 1-3 cm per second of speed instead of 11cm per second, then it would in fact, be that strong.
__________________________________________________________________________Anyway, I will try to draw this fricking mechanism.
![]()
Well, anyway, I will try to explain this crap.
On the left, you have the initial idea: a 1cm diameter winch pulls a 10cm diameter winch that is directly attached to the linear actuator.
On the right, you have a 2cm diamter winch pulling a 20cm diameter winch with a inner winch with 10cm diameter.
The bottom winch/pulley is where the electric motor will be attached and drive the winch.
I had the idea of doing that for two reasons:
1- mechanical advantage
2- the linear speed is directly proportional to the diamter of the driven actuator.This way, even though the actuator on the right has a 10:1 reduction ratio, the winch that will pull the mechanism will have 10cm of diameter, and thus, 15cm per second of speed, which is a lot, and on top of that, the motor drive will have a mechanical advantage of 2 times (supposedly).
But I'm concerned on the actual final result, I'm concerned that by applying the 10cm diameter winch with the 2:1 mechanical advantage will affect the speed and torque of the linear actuator.
__________________________________________________________________________
One interesting finding I got was double action telescopic hydraulic cylinders.
Hydraulic cylinders normally are double or single action (there are other types, like triple action, for some reason), telescopic cylinders on the other hand, are normally single action, because it is simpler to do it like that.
But one interesting thing about double action telescopic hydraulic cylinders is that the piston head has a hole on it (obviously, so the other stages can work), but you can actually make the area of the hollow piston heads so it matches the area of the retracting action, unlike conventional hydraulic cylinders, where the rectraction is often really weaker than the stroke.
Of course, *depending on the design*.The only problem I could think of was the insane amount of fluid flow this dang thing would need...
... Unless I make a telescopic "filling" tube that would occupy space and thus, require less fluid for the overall system.
__________________________________________________________________________
In any form, unfortunately I will be forced to stay with the hydraulic thingie.
Because each actuator costs 300 reais (60 dollars)... And I need 30 of these. :|
And for the life of me, I can't fricking find UHMWPE (ultra high molecular weight polyethylene) on granules and so on, neither I can find UHMWPE trash plastic so I can melt on useful stuff.
So I think I will have to stay with HDPE (High Density Polyethylene).
... And now that I'm here, I never cared to search for the properties of HDPE and compare to UHMWPE, I thought that UHWMPE would instantly be better than HDPE, but it quite the opposite, as far as I looked into it.
Also, I found out that some HDPE composites mix not just this plastic with fibre-glass, but also talc for some reason?
https://www.ncbi.nlm.nih.gov/pmc/articles/PMC5452666/I didn't read yet, but... I would say that they use it because talc is a reeeeally fine powder. For what I remember, if you mix any kind of reeeally fine powder with super glue, such as graphite and even cinnamon powder, it becomes some kind of super strong solid/composite material.
__________________________________________________________________________Acthually, I don't even know where to start with hydraulics.
Yes I had the *intent* of copying everything with a homemade version... But is that even possible? Or even worth the trouble?
How I'm going to disassemble a hydraulic cylinder piston in order to make a mold and then a copy out of HDPE?
![]()
How the heck do I disassemble one of these?
![]()
I was thinking on buying one of these from aliexpres, they "only" cost around 800-1000 reais (160-200 dollars) with shipment fee.
Let's try to list the stuff I would need for the hydraulic mech/exosuit and compare to the electric mech/exosuit:
1- Hydraulic hoses or hydraulic tubes: these cost hundreds if not thousands of reais (200 dollars or more).
2- Check valves: these also costs a lot, specially for high pressure cases.
3- Progressive valves: I need these in order to put the servo motors in order to open and close based on the pilot's movements.
4- Pressure limiters: if I want a progressive amount of force to be applied, like an electric motor's torque, I would need these.
5- Hydraulic accumulators: these cost thousands of brazilian bucks, and are really dangerous.
6- Hydraulic pumps: cost 800 to 1000 reais (160 to 200 dollars).
7- combustion engine: cost thousands of reais.
8- Arduino board controllers for servos: are kinda cheap actually.
9- Efficiency, although you can find some pump designs that have 80% efficiency, it doesn't mean the system will be that efficient (https://www.fluidpowerworld.com/hydraulic-efficiency-myth/).
Not to mention that the hydraulic fluid may reach high temperatures because of the fluid dynamics in a hydraulic system, temperatures high enough to melt HDPE, hundreds of degree celsius.(maybe I could control the valves with manual input of my own body, but it is hard to say if it would work with stewart platforms).
I would need a spare part for every little thing, or I would need to actually buy everything and then attempt on copying everything with HDPE injection molds. I think it is not really viable...
Yes, I *could* build everything from the ground up without the need for buying originals... But I'm reall qualified for that? *hyphotetically*, the only cost would the HDPE, the pump, and other materials for making composites, like fibreglass, carbon fiber, aramid/kevlar fiber or plain steel wire for reinforcement.
![]()
![]()
Now electric mech/exosuit:
1- Electric motors: costs 300 reais (60 dollars) each, some times much more than that.
2- ESC controller: around 50 reais to 100 reais (10 to 20 dollars).
3- Arduino processing boards.
4- 6 ton resistant rope: a few hundred reais for a 100 meters or so.
5- Laser cutting master pieces for HDPE molding.
6- Sensors: these may be cheap (around 5 to 10 dollars), but since I need some for every actuator, it can hurt the wallet when bought on bulk.
7- Power source: a combustion generator or a homemade hydrogen fuel cell.Now that I compare each... I guess the electric mech/suit wins...
(how much you bet I will suddenly change my mind and choose hydraulics?)
__________________________________________________________________________
(I already changed).
I couldn't find any website that was selling these kinds of electric motors on bulk, so the shipment fee was around 2000 reais (400 dollars) and the final price of every single motor (that costed 367 reais [74 dollars]) was around 11000 reais (2240,25 dollars).
I was thinking on 3D printing or laser cutting models on styrofoam or similar materials and then casting an HDPE copy.
Of course, the 3D printing process won't have nearly as much precision necessary for building this thing.
The positive part of this is that some hydraulic components (such as the gear pump) are basically flat images, perfect for laser cutting.... I was wondering if this is not a coincidence tho... A lot of gear pumps in the market really look like a casted piece, and it would make a lot of sense...
Also... I think this could bring me a lot of freedom on designing the components for the hydraulic system... But I don't think it would be beneficial for me that much, after all, i'm not an engineer.
Also, I took a while searching 3D models of hydraulic pumps and cylinders, but... Couldn't I just copy hydraulic motors and keep the same damn design of the electric system?
I mean, the hydraulic motors would be easier to make than the hydraulic cylinders...Well, this is me from the future: bad news, no matter how much I search, winch mechanisms are like, 15% efficient. So what is even the point of using electric or hydraulic motors in this systems?
This is me from the further future: I just saw that this kind of mechanism isn't a "winch", but a "hoist", and hoists have 95% of efficiency.
An answer someone gave to me: "Winches used to lift are typically referred to as Hoists, and there's a lot to them since we've recognized that large weights in the air will kill you if they fall on or near you. This is really not a DIY type of device."
Well, luckily I'm building a mechsuit, not a winch, I will just stay on top of it. It will definitely be safe... /s
Also, I forgor to say, but if you put another winch/hoist on the basis of linear winch/hoist mechanism that I previously showed, connected to another inner linear actuator, you will actually have a telescoping mechanism.
Not so dissimilar from this:
Which would be very handy, since
(I accidentally erased the rest of this part, and I don't remember what it was written, lol)
I guess I would say something like "which is handy, since you could make telescopic ones easily"...
__________________________________________________________________________Also, I was thinking here and one thing that stood out is that one of the reasons hydraulics aren't that efficient is due to the mechanical losses on the hydraulic fluid flow.
I don't know how much high these losses are, but I would need to make as little curves as possible.
The ideal hydraulic pipe would be a straight pipe directly connected to the machine in question, however, I do have some ideas on how to achieve this.
1- I either use straight pipes until it is impossible (like a curve or something), then I put the hydraulic hoses with as little curves as possible connected to the actuator.
2- Other option is tho literally use straight pipes everywhere with curves as wide as possible in order to not mess the flow.
For example, I thought on a tube connected to a hollow sphere joint that connects to another hollow isphere joint on the actuator in question.
Or simply divide itself in a star-tube with telescopic tubes connecting to the actuators with also hollow sphere joints.Of course, this in the case of the mech.
I think I might need to draw this...
Also, I believe I will have to put the valves (of any kind) closer to the actuators, on on the actuators themselves, since these cause a significant amount of turbulence.
In both cases, I'm getting a little concerned, because if the mech suit falls into the ground... A lot of stuff may break...
__________________________________________________________________________
Also, with the heat issue of the hydraulics I was thinking on mixing teflon powder with graphite/graphene powder in order to increase its heat resistance, but that can fire backwards since teflon has a terrible stiffness.
I could also add other plastics, such as Nylon, Polycarbonate, ABS, PEEK (Polyether Ether Ketone) and so on.
I choose HDPE because it is simply a common plastic to find everywhere, specially on trash.Also, I totally forgor about fiber glass, steel, even Alumina or Silicon Carbide powder and so on.
Also², I forgot that there are 3d print filaments on sale on the internet, I can just buy these filaments and cut them down.
When I bought my 3D printer I also bought a polycarbonate filament roll, I barely used it.
Except PEEK (Polyether Ether Ketone), just 500grams of this crap costs 2000 reais (400 dollars).Although I will have to research a little more on the internet, because I feel like if I put so much crap on this polymer structure, it will make the final product peform poorly.
Also, I was searching here and there are two kinds of hydraulic systems: open loop and closed loop.
I intend on using open loop in either way, but the closed loop is the one that needs active cooling since it *actually* can reach hundreds of degree Celsius."Hydraulic fluid temperatures above 180°F (82°C) damage most seal compounds and accelerate degradation of the oil. While the operation of any hydraulic system at temperatures above 180°F should be avoided, fluid temperature is too high when viscosity falls below the optimum value for the hydraulic system's components.
To achieve stable fluid temperature, a hydraulic system’s capacity to dissipate heat must exceed its heat load. For example, a system with continuous input power of 100 kW and an efficiency of 80 percent needs to be capable of dissipating a heat load of at least 20 kW. Assuming this system has a designed cooling capacity of 25 kW, anything that increases heat load above 25 kW or reduces the cooling system’s capacity below 25 kW will cause the system to overheat."
Source: https://www.machinerylubrication.com/Read/680/hydraulic-overheating#:~:text=Hydraulic%20fluid%20temperatures%20above%20180,for%20the%20hydraulic%20system's%20components.
__________________________________________________________________________... Wait, what if I try copying the brushless electric motor?
I know that I can't find the specific materials used on the metal cores or what type of magnet was used on the rotor... But I could copy these, right...?
_____________________________________________________________________Edit¹:
I just found this 3D model on GrabCad with this exact Brushless motor with 90KV that I'm thinking on using.
I think I won't need to buy one and then disassemble it, but it is a nice option.
_____________________________________________________________________
A little bit easier than copying the hydraulic pumps, valves, cylinders, hoses and so on...I think I should do that instead...
Well, I will at least try to see if it is at least feasible.
In this video he teaches a really interesting way of cutting fine metal plates on the shapes you want.
Basically, you cover the sheet metal with protective paint and uses a laser engraver (or other method) to cut the protective layer of paint. Then you submerge the metal plate on a bath of salt water with a electric charge from a battery and the salt will slowly rust and eat the unprotected parts of the steel plate, giving you the shape you want.That is relevant for a electric motor because I will have to find a way of making a *lot* of plates for the stator part of the electric brushless motor.
![]()
... THe only problem is that I will probably need to disassemble and k1ll the 367 bucks electric motor, ugh...
Well, from the images, the Stator has 36 "teeths" (or poles) and accordingly to its dimensions something between 7 and 8 centimeters of diameter.
Well, on the internet these stators cost more than the brushless motor itself, lol.
... But maybe I could find better types of metal for stators... And maybe better magnets, such as neodymium magnets (if these aren't that expensive).
... I was wondering, would it be efficient to make the stator this weird star thingie, or just put electromagnets on its place? It would be easier to produce manually...
The video below isn't quite relevant to this subject, but I'm just putting here in order to remember about it, he order a bunch of sheet metal cuts form the internet in the cheap, so I will try to do the same.
I was looking around and I received this answer (that was copy-pasted from ChatGPT):
"Soft Magnetic Composites (SMCs): SMCs are composite materials made of iron powder particles embedded in an insulating matrix. They offer good magnetic properties and can be shaped into complex geometries. SMCs can provide an alternative to silicon steel, particularly in applications where reducing eddy current losses is essential.
Compared to traditional silicon steel, SMCs offer several advantages:
Reduced Eddy Current Losses: Eddy currents are induced currents that circulate within conductive materials, leading to energy losses. In SMCs, the non-conductive matrix between the ferromagnetic particles helps to reduce eddy current losses, resulting in lower core losses compared to silicon steel. This improved performance is particularly noticeable at higher frequencies.
Design Flexibility: SMCs can be formed into complex shapes and have the potential for intricate geometries that are challenging to achieve with laminated silicon steel. This flexibility allows for more efficient designs, reduced manufacturing complexity, and improved utilization of the available space within the stator.
Vibration Damping: SMCs exhibit good damping properties due to the presence of the polymer matrix. This helps reduce noise and vibration levels, resulting in quieter motor operation.
However, SMCs also have some limitations:
Lower Saturation Flux Density: SMCs typically have lower saturation flux density compared to silicon steel, which means they may not be as suitable for high-flux applications.
Lower Permeability: The permeability of SMCs is generally lower than that of silicon steel. While this can result in reduced core losses, it may require more material volume to achieve the same magnetic performance."
This seems like a good alternative to laminates since I don't have the tools for that, of course, at the cost of some efficiency that may or may not be compensated by the neodymium magnets (if I even have the money for that).
I also found some ads online selling silicon steel for transformers, around 100 brazilian bucks (20 dollars), but these come in the shape of an "E" or an "l", not really in the shape that I need, but I can simply cut them with a scissor.
Nah, for this price, it comes too little units to make 30 motors.However, I'm literally looking for *anything* containing silicon, pure iron, nickel, crome and cobalt.
Brute silicon metal that I will try to break/cut to smiderings, nickel/crome/cobalt electrodes for welding, iron foils to be cut, old transformers and so on.
I will cut everything to pieces in order to make these SMC coresI was wondering here: if I can make the electric motor from scratch, what if I change the wire thickness?
You see, the thicker the emaneled copper wire is, the more amperage it can transmit, and the more amperage it can transmit, the bigger the torque output, so I could make a 30 rpm electric motor without much trouble...
Except that I would probably overheat the entire thing and possibly even brake it.
__________________________________________________________________________Well, I was thinking here that since I'm making linear actuators with hoists/winchs, I would need a manner of avoiding the tube/square thing that will move from pressing too hard on the walls/bearings of one side instead of the another.
The best way of avoiding this would be putting an actuator on both sides, or even more, and thus, it could make sense to use multiple smaller electric motors instead of just one (that costs 365 reais [+/- 65 dollars]).I will try to find electric motors suitable for such thing and then I will analyze if it will be worth the trouble.
... Well, it is me from the future, and boi, oh boi, I can't believe how many electric motors out there with 20watts are more expensive than this stupid thing.
Bruh, I literally came across an electric motor with 0.2 watts that cost twice as much as this 90kv thing.
I found this 180watts electric motor that has 40,000 RPM, if you divide 600watts per actuator by 4, you would need 150watts per actuator, needing 120 in total.
If you multiply the price tag 33,88 reais (6,88 dollars) by 120, one would need to pay 4065.6 reais (820 dollars), *not including the goddamn shippment fee, that is as expensive as the electric motor itself; costing 8000 reais in total (1640 dollars).I'm starting to feel more compelling to switch over to hydraulics, because there is no way that I would be able to afford this electrical thing...
Even if I powered it up using a 20+ horsepower brushless motor (or induction motor), it would still cost way less than fully electric.
A 25kw (33 horsepower) electric motor costs 3000 reais (600 dollars) on ebay...
Copying the electric motor with SMC's is still a possibility tho.
__________________________________________________________________________
Waaaaait a Mcfricking minute.
I am the stupidest person alive?!
If one Stewart Platform of this mech with 3600 watts would be able to lift around 12,000 kg (supposedly), this doesn't mean that I would just need to make a stewart platform 100 times less powerful?
Meaning that I wouldn't need 600 watts per motor, but just 6?
This means that an exoskeleton with 6 watts would be able to lift 40kg.
I mean, assuming that each actuator is at a distance of 1/3 of the fulcrum point compared to the arm, then the actual mech would be able to lift 400 kg.
Of course, in mechanical lever logic, but for some reason it feels like the mechanical lever and torque have completly different logics for me, and it is all really confusing...So... Since 1 newton meter is 10kgfcm, and assuming that the disk of the hoist mechanism has 10cm of diameter, then this would be able to lift 1kg, so I need 10 times more force, so 10Nm, but since I will be at 1/3 of the length of the mechanical lever (aka limb), I would need 3 times more power, and thus, 30 newton meters and 30 RPM in total.
Resulting in 94.25 watts.
Dividing this by the 6 actuaros, and since only three will working when rotating, then it would be more or less 30 watts per actuator.
So, 200 watts per limb and 1000 watts in total.
I guess this is more doable...
Of course, I'm assuming 200 watts in total, but in reality, it would only be 100 watts, the same applies to the mech.
So, it would be 500 watts/0.6 horsepower for the exoskeleton and 9000 watts for the mech, 12 horsepower in total.Now I just noticed something...
And it may or may not mean that I misscalculated stuff (again), but it doesn't look weird that an exoskeleton with 0.6 horsepower can lift 100 kg, but a mech with 20 times more power (20x0.6=12) can *only lift 4 times* more weight?
Yeah, I misscalculated something, I don't need 300kgfcm (30 newton meter), I need 3000kgfcm (300 newton meters) of torque because the disk has 10cm, so it is 10 times less torque.
So it would be 900 watts of power in total per limb, not 90 watts, meaning it would be 4500 watts in total, 6 horsepower.
The same applies to the mech, it would be able to lift 200 kg at the arms, not 400, neither 4000, neither 12000 (assuming that it uses the 10cm wide winch/hoist/pulley, the calculations where it was 1 to 3 cm per second are correct, I think).
So, in order to lift 1000 kg, I would need 10 times more power, around 120 horsepower.
The mech is still viable *if* I make it to move 1 cm at second.
__________________________________________________________________________
Holy crap my dude!
I was all excited looking for 30-50 watts electric motors and these are more expensive than the 365 reais (65 dollars)!
How in tarnation these smaller motors are more expensive than a brushless motor?!However, I did find a *single* electric motor with 25 to 30 wattage of potency, and it looks like one of those motors you find on PS2 controllers.
It would cost around 500 reais (+/- 100 dollars) in total for all 30 actuators, but even then, I would lose some power with the power transmission. I would need a 50watt one.
At the end of the day it is more cost effective to buy a 300 brazilian bucks brushless motor and copy it than buy properly rated electric motors.
This is such bs...
__________________________________________________________________________Anyway, all this talk and I didn't 3D modelled crap.
![]()
(you guys have no idea on how long I've been procrastinating, for some reason, every time I think on actually 3D modelling, I feel a spike of ansiety through my chest and an annoying voice saying that it is not worth and I should just give up)
__________________________________________________________________________
Well, my last project log was 28 of may, so it has been 11 days since then (the moment I'm writting this), 3 more days for 2 weeks.
Also, I think it is the "birthday" of 6 months of me working on this stupid project.
Half a year has passed and almost no progress on this crap... Sigh...![]()
__________________________________________________________________________
I was trying making this 3d model thing on Blender again and again, but no matter what I tried, it was never going as I expected.
3D modelling programs always have confusig ways of moving and changing the goddamn 3d model.If I could simply take the 3D model with my hands and put it where I want, I wouldn't have half of the problems I have with 3D models...
![]()
Well, here is a drawing instead of a 3D model.
However, I will try to make the 3D model of the actuator later, right now I'm having some personal problems...
-
Project Log 51: 3D modelling attempt 6 - back and forth.
05/22/2023 at 21:34 • 10 commentsMonday, 22/05/2023, 18:10.
You know what? I think I will post this project log right now.
I kinda thought on only releasing it when I finished the entire exoskeleton.
But whatever, it is Sunday, I'm tired, my brain is not working, I will try again another time.
_____________________________________________________________________
I really shouldn't be writting this project log right now, but here we go...
![]()
Some times this project is a torture for me y-y
Possible ways of controlling the exosuit:
I was thinking of a way of controlling the exoskeleton in more or less the same way I was planning on controlling the mech, but as you can imagine, I can't put the human pilot on a safe-box/cockpit. I need to have a feedback loop in real time.
I was thinking on this:
- Having a tiny lever attached to a potentiometer an water hydraulic system (fancy term for a water syringes attached to my body) and a spring.
- Assuming that each limb will have a 1mm space of movement, when the limb (or other part of the body) exits this position, it will press a large, but extremely thin plastic piston.
- The large piston will push a lot of water into a smaller piston with less force that will rotate the lever attached to the potentiometer.
- When the limb releases the pressure, the spring will push the potentiometer back to zero.
- Since the amperage determines the torque, and the volts determines the rpm, there could be two potentiometers, one for each type.
I think I already talked about this in previous project logs, but there are so many that I couldn't find for the life of me, lololol.
I just don't know how well this will perform... After all, if both potentiometers are engaged at same time, how this analog system can control the amount of force each action needs?
I would basically doing every movement with maximum force... 🤔
I think one way of solving that is using a long hydraulic piston to the speed and the larger one for force.
After all, I would only need speed if my limbs are free, and I would need force when my limbs movements are limited. 🤔By the way, the system would be like those hydraulic toys.
![]()
Also, James Bruton made a pressure sensor in his exosuit project, but he attached the pressure sensors to a joystick instead of his own body.
I think I should use this model of control instead of serynges....
Also, he did another video making other type of sensor:
Other Actuator:Well, I was looking for homemade exoskeletons and robots and I stumbled over James Bruton open dog/cycloidal drive video:
(he [and other members of this project] said that robots usually use 10:1 reduction ratios in order to achieve some "springy" action and good efficiency, however, in order to achieve a 10:1 reduction ratio and still have 200 newton-meters of torque, I would need a 10kw [14hp] electric motor, which costs around 1000 reais [200 dollars])
At more or less minute 2:40 he shows a brushless motor with merely 90kv of rotation, and once I saw the ad on his video, I searched for the motor just to see what I would find.
Well, the motor he shows ranges from 900 watts of power to 1800 watts (here is the link), exactly what I want.
And I would only need around two reduction ratios of 10:1 (and thus, 100:1 in total) in order to achieve the RPM that I need. Unlike the abomination that I did in the last project log... Although I would need to play a bit with the reduction ratio because of the chain drive at the end...
The only problem is that it costs 3 times more than the electric motor that I used as a basis on the previous project log.
... The other problem is that this means that the hours and hours searching and calculating reduction ratios were for nothing.
![]()
Also, other thing that annoys me like hell:
I can't never find brushless motors like the one James Bruton used no matter how much I tried.
It only shows 1000$+ electric motors and so on.
I'm really out of luck huh?
I was watching this video and he said that slower electric motors (or "outrunners") are a little bit worse at acceleration than this smaller one he is using... IF you're not using an appropriate speed controller with enough energy.
I was also watching James Bruton series on building his Iron Man exosuit, just to see if I can have any ideas on the subject.
In this video in specific, he uses a pulley mechanism that ends in a sprocket for the arm motion.
Of course, I already discarded this idea because pulleys aren't really efficient, neither are precise.
However, I didn't considered using sprockets/chain drives like "toothed pulleys". And sprockets have a lot of efficiency to spare.
Which could be an interesting take on the apparatus, since I will be using the 3000 rpm electric motors instead of the 50,000 rpm motors. So maybe the pulley/sprocket won't have any problems with the rotational speed (since every kind of transmission system has a speed limit).
Well, anyway, I was looking for reduction ratios for this new electric motor and I decided I will have to use two reduction ratios of 10:1.
First, I will use the cycloidal gear that James Bruton himself used, and then I will directly connect it to a sprocket/chain drive with 10:1 ratio.
The smallest sprocket that I found was 7 teeth, so I will need to have a 70 teeth bigger sprocket being driven by the smaller one.
![]()
But I will try to search for 3D models/STL sprockets with the same ratio because I believe I will have to increase the thickness of the sprocket and the chain.
I could only find this 3D model on GrabCad with a sprocket with 70 teeth and this one for the 7 tooth (I can't believe this was the only links I found with 7 and 70 teeth, bruh).
Of course, I will have to check if the space between the teeth is compatible and probably modify these.
I will first to find a more robust sprocket chain first, the one I showed in the previous project log wasn't that good for this application, since the chain connections where push-in connections. Which wouldn't last much on a system such as this.
Well, I found this chain for motorcycles on the GrabCad website, and it seems like one of its chains can even be 2D cut on any medium (or this one).
![]()
3D modelling:
Anyway, putting it together on Blender:
![]()
I took a teeth from the original sprocket (on the left) and used an array modifier to make the teeth both in the 7 toothed sprocket and the 70 toothed sprocket.
However... There is a little problem: the original sprocket doesn't have 70 tooths, it has 69 (nice).
It is not a big deal tho, I will have a little broken ratio of 9.8571, but it is almost 10:1.
Well, I felt like I did an half-assed attempt on making a sprocket gear, so I decided finally look for a tutorial on how to make sprockets on FreeCAD.
(and yes, this "I didn't try hard enough" is one of the reasons that I simply never finish this stupid project)
This is me 5 hours later, I couldn't understand heads of the program and no matter how much I looked, I couldn't find any kind of image that fitted in the specifications of the chain.
![]()
No matter how f#$king much I tried, it simply doesn't appear on google and I can't understand a hint about the tutorials...
Well, guess what? The sprocket, chain and the other links I posted here don't match up no matter how much you change them.
So this means that I will have to make my own sprocket from the ground up anyway.
The best I can do is copy the scale of a real chain and built a sprocket from the spaces between said chain.
I thought first on editing the chain itself from the links I posted, but I just say this wacky chain that I think it will be easier to make on blender:
![]()
Dunno what will get out of this, but these circles seems way easier to make and put together...
The only problem is that, unfortunately, I will have to make almost every part from the ground up.
I wish I could just put together a list of off-the-shelf parts on this thing, but unfortunately, the more I search for off-the-shelf parts, the harder it is to find parts online.
Not to mention that sometimes, these parts are really expensive.
Yeah, one or two would be fine for anyone to buy, but you would need dozens of these.
![]()
By the way, the reason I am so invested on sprockets instead of gears is because of the resilience and efficiency of sprockets.
The sprockets distribute the loads more efficiently, not to mention that I was planning on actually make it without the laser cutting, because since the sprocket will depend on the diameter of the chain rollers. So you can actually make one by hand without much trouble (I think).
But at this point, screw it, let's go with gears...
I found these gears on thingiverse that go from 10 to 120 options.
![]()
The big gear has 15cm in diameter, the smaller one has 1.7cm of diameter and both have 3cm of thickness.
Obviously, I don't intend on using the entire gear like the way it is, I will put holes on it to aliviate the amount of material required, and even cut it in half depending where it will go.
Also...
I could just have done this from the start... I think...
An actual engineer (like James Bruton) would have finished this stupid project long ago.
Right now it has been 6 months since I started this senseless endeavour.
Everything I do in this project feels like a infinite roadway where my knees are being dragged into the asphalt.
... But we have to keep going anyway xD
So, back to the subject:
So, just putting a single gear wouldn't be a wise decision (accordingly to my gut feeling), because too much load would be being applied to a single gear teeth made out of plastic.
So, the idea is to put 1:1 gears around the bigger gear.
Well, I do think it would be better to distribute the rotation/torque to each gear with a sprocket, but I'm way past that... >.>
![]()
Something like this, but I was thinking in a gear transmission without looking like a dumb pyramid...
Also, I did thought on using less powerful electric motors for this... But it would get more expensive than just buying a single expensive electric motor (as far as I was able to find).
Also, I just found this video, where the guy explicitely makes this actuator to be laser-cutted, while the james bruton one was made to be 3D printed.
Although I don't know how to change it yet, I'm waiting the guy to post his files.
Of course, I won't just wait still waiting the guy to release it, I will try to modify James bruton's cycloidal drive in order to be "laser cuttable".
Just to remember: I have a 3D printer and I hate that piece of garbage, and thus, I'm choosing laser cutting for its precision and simplicity.
Another day were this project didn't magically finished itself...
![]()
Well, I tried to make a "mockup" of the final thing with what I got so far, and...
![]()
That sure is an ugly looking exoskeleton...
These big gears/sprockets really don't seem strong enough for the job... I believe I will have to find another kind of power transmission or simply making the actuator stronger...
Yeah, I guess I will have to use a winch mechanism, one with 1.5cm of diameter with a rope connecting both sides of the limb.
... And all of this trouble just to go back to that...
![]()
Funnily enough, while I was looking for winch mechanisms, I came across this interesting piece of winch mechanism, that actually is a linear actuator:
Other relevant subjects to the project (Off-topic?):
Also, I was wondering how to make a DIY efficient Hydrogen Fuel Cell.
I heard these are expensive because they use platinum coated/pleated catalysts...
But if I go to google shopping, platinum coated/pleated metal wires are quite cheap, strangely enough.
I just don't know how those things are made... 🤔
I asked around and I found this answer:
"Wire is platinum plated; fuel cell elements are coated, which is many times thicker; the amount of platinum plated onto an entire reel of wire might be as much material as would wet your finger if you lick it; in a fuel cell, you might find ounces of the stuff."
... Well... It makes sense now...
Well, I wasn't quite satisfied, so i searched a little more:
So I decided to look at how exactly hydrogen fuel cells are made.
And it looks like it is relatively easy to make and build, the most expensive parts are the catalyst and the proton exchange membrane (that I think you can use from normal batteries).
The catalyst anodes are basically porous graphite with platinum nanoparticles, basically an sponge.
I was thinking on buying platinum pleated wire to a fine powder (or just roll it inside a graphite sponge) and stacking it up.
I searched a little bit, and a 50kw fuel cell for cars uses around 20 grams of platinum.
Welp, I need 10 times than this, so I would gess that 2 grams of platinum are enough.
Of course, I feel like it is not that simple and there are a lot of crap necessary for a good and efficient fuel cell...
![]()
Welp, it seems like both the anode and cathode are porous graphite with platinum nano particles...
I did find out that there are other types of hydrogen fuel cells that are more efficient and don't need rare minerals such as platinum.
One of these is Molten Carbonate Fuel Cell, these normally are for industrial use and are quite complex to build.
![]()
Anyway, this one is a Molten Carbonate Fuel Cell for a 1 megawatt (1 million watts) power plant.
Also, I found a generator that is really light and can deliver 4kw of power (5.3 horsepower) and isn't obscenely expensive.
It is called "Digital TG4000I Toyama" or something like that.
It weights 30 kg with fuel and all.
Even if I had two of these stacked, it would still weight only 60kg while delivering 8000 watts of power.
Generators with this kind of output weight around 100kg or double of that.
I still didn't calculate the final output, but hey, at least I have to get some good news, right?
Also, this guy made graphene in the cheap, I wonder if it can be of any use in this project...
I tried to search for graphene hydrogen fuel cells, but there simply isn't much concrete conclusions on that.
It is always the "graphene can make fuel cells more efficient", saying "can make" doesn't mean these "will make".
I always heard that graphene and carbon nanotubes "would change batteries forever and we wouldn't need lithium anymore".
Guess what? We still need lithium, the batteries only use graphene to protect the anodes and cathodes from deteriorating, nothing that exciting... :/
This and the other video about graphene that can be made at home, makes me wonder: should I go back to hydraulic power?
UHMWPE composite that I talked about on Project Log 45, with this graphene, could make things quite interesting...
For a moment I thought that I could make the hydraulic cylinders and the hydraulic pumps out of UHMWPE composite with graphene... But the problem still is the power transmission efficiency...
Also, I totally forgor that hydraulic systems tend to heat up a lot during compression...
So, anyway, in my frustration (as written in this Project Log) I was researching for more efficient artificial muscles and I finally found the efficiency of carbon nanotubes and graphene.
... It is 0.5% of efficiency. :|
I asked on quora and its version of ChatGPT, the "poe" answered the following:
"I'm not aware of any artificial muscle or soft actuator that can achieve the same efficiency as electric motors across the board, but there are certainly some promising developments that are worth exploring.
Silicone-based soft actuators, such as those made from SilicONGEL, have shown some potential in terms of their efficiency and performance. SilicONGEL is a type of polymer that can be engineered to have specific mechanical properties, including high elasticity and the ability to generate significant force when subjected to an electric field. This makes it well-suited for use in soft actuators that can mimic the movement and function of natural muscles.
While the efficiency of SilicONGEL-based actuators may not be as high as that of electric motors across the board, they can still be quite efficient for certain applications. For example, researchers at the University of California, Los Angeles (UCLA) have developed a SilicONGEL-based actuator that can generate a specific force of up to 1.2 newtons per gram while consuming only 0.7 watts per gram. This translates to an efficiency of around 42%, which is quite good for a soft actuator.
Overall, while there may not yet be an artificial muscle or soft actuator that can match the efficiency of electric motors across the board, there are certainly some promising developments in the field that are worth exploring further."
"A processable, high-performance dielectric elastomer and multilayering process"
It is "just" 42% efficient, but I don't know how much it costs, how hard it is to make and how well it works. Even so... At this point, taking into consideration how much it weights and how much the current exoskeleton would weight... I don't think that's much problem, to be honest.
Assuming it is relatively easy to make, of course...
I requested to view to article on ResearchGate, so I hope they give me permission to read it...
The only place I found some informations of the material was this website.
So... Assuming it is "just" acrylic with silicone and some conductive material, then it would be cheaper to make than buy a 300 reais electric motor for each joint...
Not to mention that I could have the option of making an "augmentation" exosuit, which instead of giving the user super human strength (like lifting 100kg+ for X hours), it would only give the user a support and help on areas with more tendency to be hurt.
Such as the knees, the feet and the back.
It could even be useful for the eldery that have difficulty walking and so on.
I just crossed upon this video about ignition coils for car engines.
Why is this relevant to artificial muscles?
Welp... Dielectric Elastomers use very little amperage, but large voltages, because essentially, they are working with the electric static.
A 10,000 voltage supply with 0.0001 amperage is still 1 watts of power.Unlike normal transformers, the ignition coil drivers get full charge in miliseconds and reach 10,000 volts when the energy supply is suddenly cut.
This could mean that instead of relying of incredibly heavy and dangerous power conversion systems, a dielectric elastomer system could work with pulses instead of keeping the energy always turned on.
I don't know if this would make much difference, but in my smooth brain, I thought it could make the system more efficient...
... Besides, maybe one could make flash graphene using one of these instead...
This video shows a leg mechanism that I thought it was kinda interesting, but I don't know if I should even try something similar:
Also, I'm starting to doubt the results of my little experiment with 30 rpm movement of the human body...
I was looking at this rpm visualizer and this article on research gate.
30 rpm seems too dang slow, and on the article is said that the people achieve 180 rpm average. Although I don't know if it is 180 rpm on each joint or on the treadmill.
However, ChatGPT said the following:
Me: How much rpm does atlas robot achieve?
ChatGPT: As of my knowledge cutoff in September 2021, the Boston Dynamics Atlas robot had a maximum joint speed of approximately 15 revolutions per minute (rpm). However, please note that my information might be outdated, and there may have been updates or improvements to the robot since then. I recommend checking the official Boston Dynamics website or contacting them directly for the most up-to-date information on the capabilities of the Atlas robot.
On the own Boston Dynamics website, it is said that the atlas robot can achieve a running speed of 2.5 meters per second, which is around 9-10 kilometers per hour.
Assuming that the exosuit will move at twice the 15 rpm speed, then it would achieve around 20 km/h.
On the google, it is said that the average human speed is around 10 km per hour, very close to Atlas.
I know it is annoying for me to always bring up the same subject time and time again, but taking into consideration the amount of mistakes that I've made throughout this project, I think it is necessary to always check constantly.
_____________________________________________________________________
DIY Mech or Exoskeleton suit.
Mechs are not viable, nor cheap, so I will try to design and build one alone anyway.













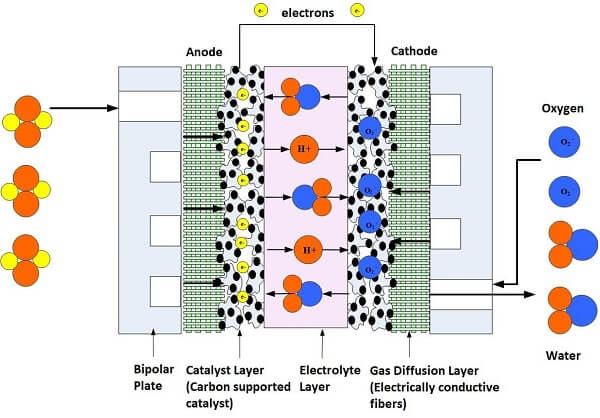
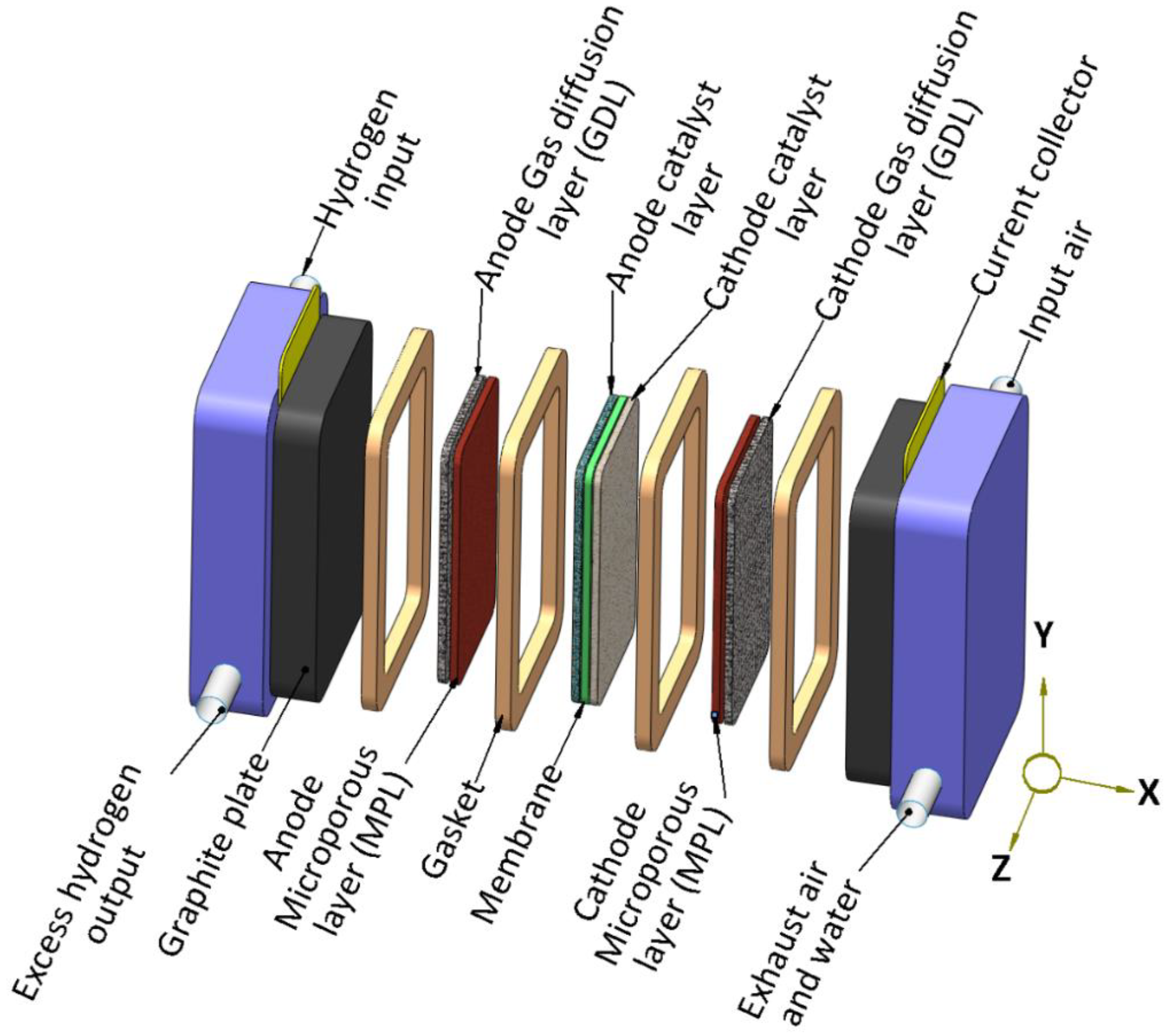

 The article: "
The article: "