 gustavoriverag
gustavoriverag-
1Obtener brazo MK2
Archivos para imprimir, configuraciones y ensamblaje se puede encontrar en https://www.thingiverse.com/thing:1454048.
-
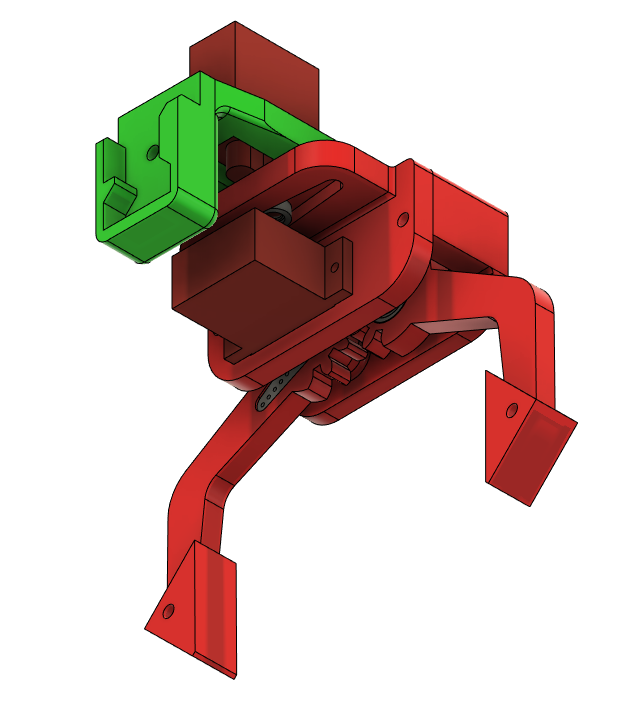
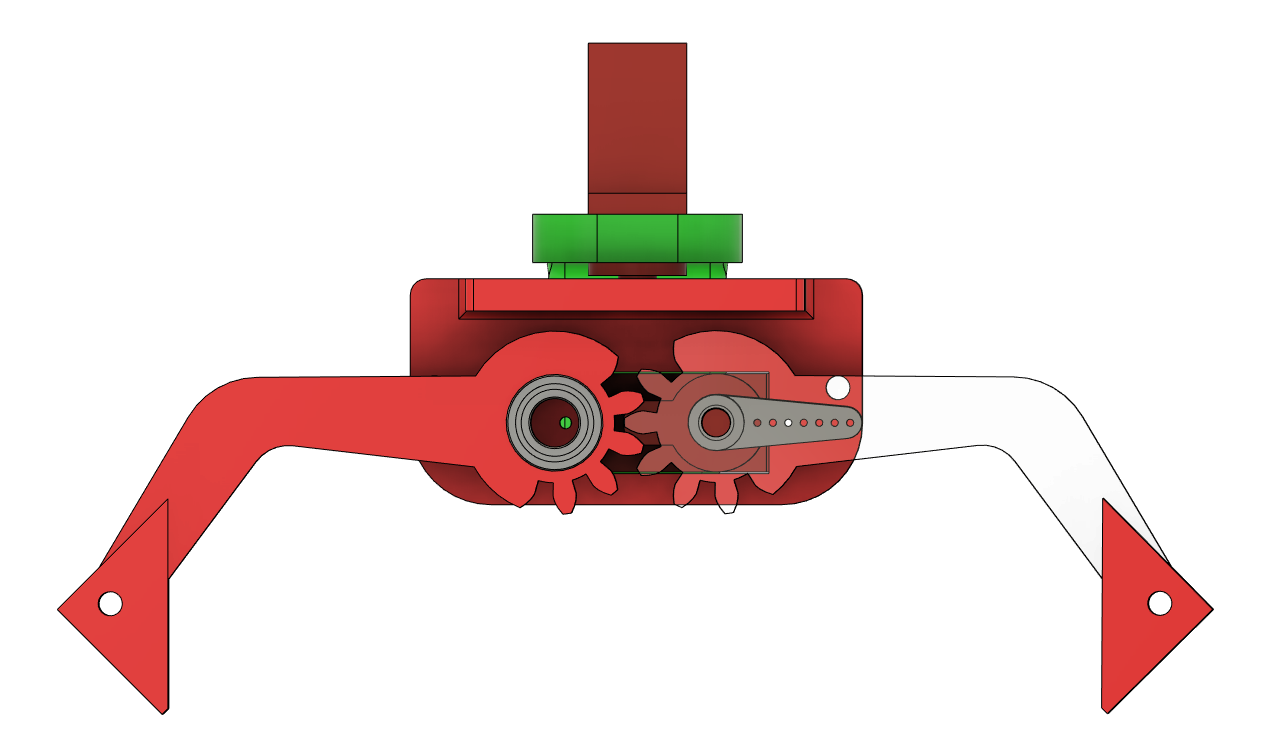
2Impresión y armado de Gripper
Los archivos .f3d están en el comprimido "GripperF3D.zip". Utiliza dos Servo MG90. El ensamblaje es bastante simple, y se puede ver en el archivo de ensamble incluido.
![]()
![]()
![]()
-
3Calibrar servomotores del brazo y del gripper
Calibrar los servos del robot de la siguiente forma:
- Base: Servo en 90° con el brazo totalmente centrado en la base.
- Hombro: Servo en 90° con el brazo totalmente vertical.
- Codo: Servo en 90° con el antebrazo totalmente horizontal.
- Muñeca: Servo en 90° con la muñeca centrada con respecto al brazo,
- Gripper: Servo en 180° con el brazo del servo horizontal.
![]()
![]()
-
4Instalar la banda transportadora en la base
El fin de la banda a 100 [mm] del borde de la base, y el costado de la banda a 50 [mm] del borde de la base.
![]()
-
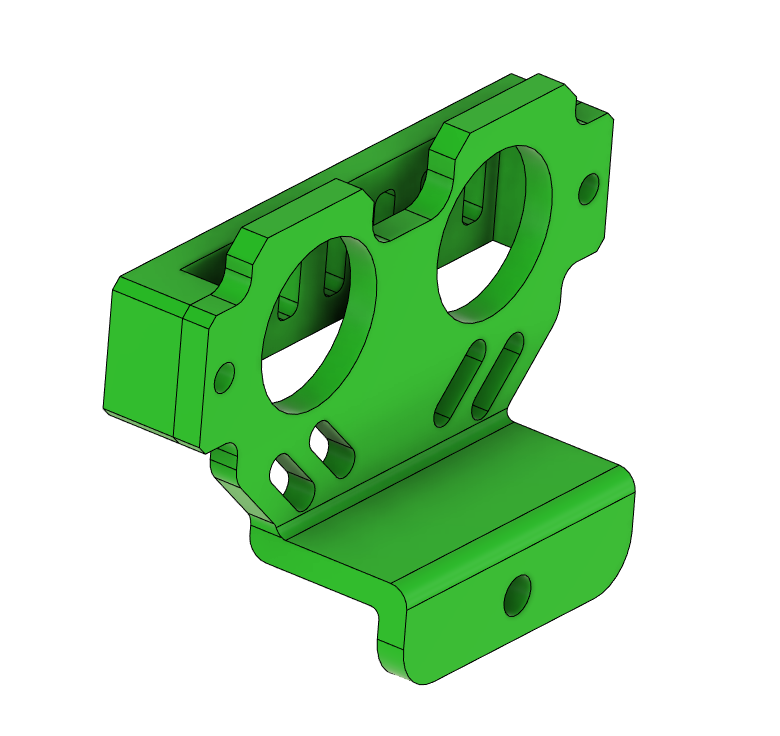
5Imprimir soporte para sensor ultrasónico
![]()
-
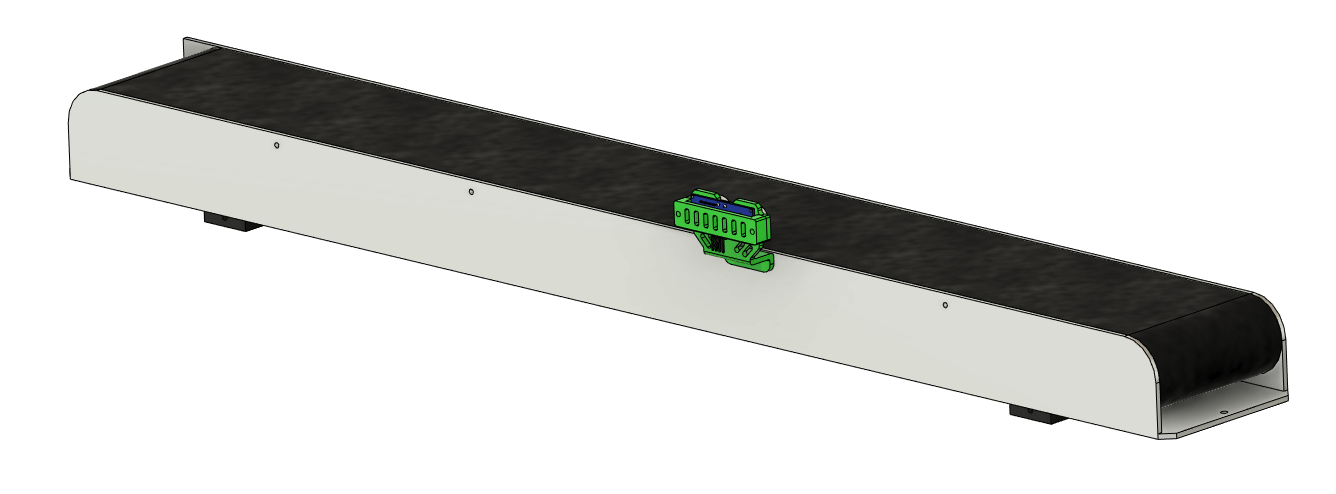
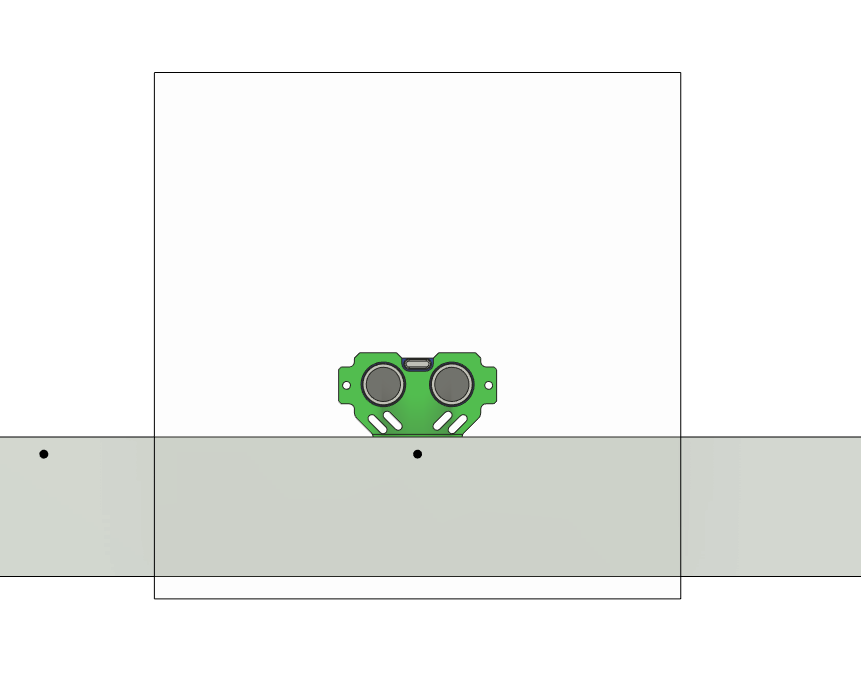
6Instalar el sensor ultrasónico
Se instala en la banda en la segunda perforación de un costado.
![]()
-
7Hacer la perforación al acrílico
Se realiza una perforaion de 3[mm] a centrada de forma horizontal y a 55[mm] del borde inferior.
![]()
-
8Instalar el acrílico transparente
Se instala en la perforación contraria a la que se instaló el sensor ultrasónico.
![]()
-
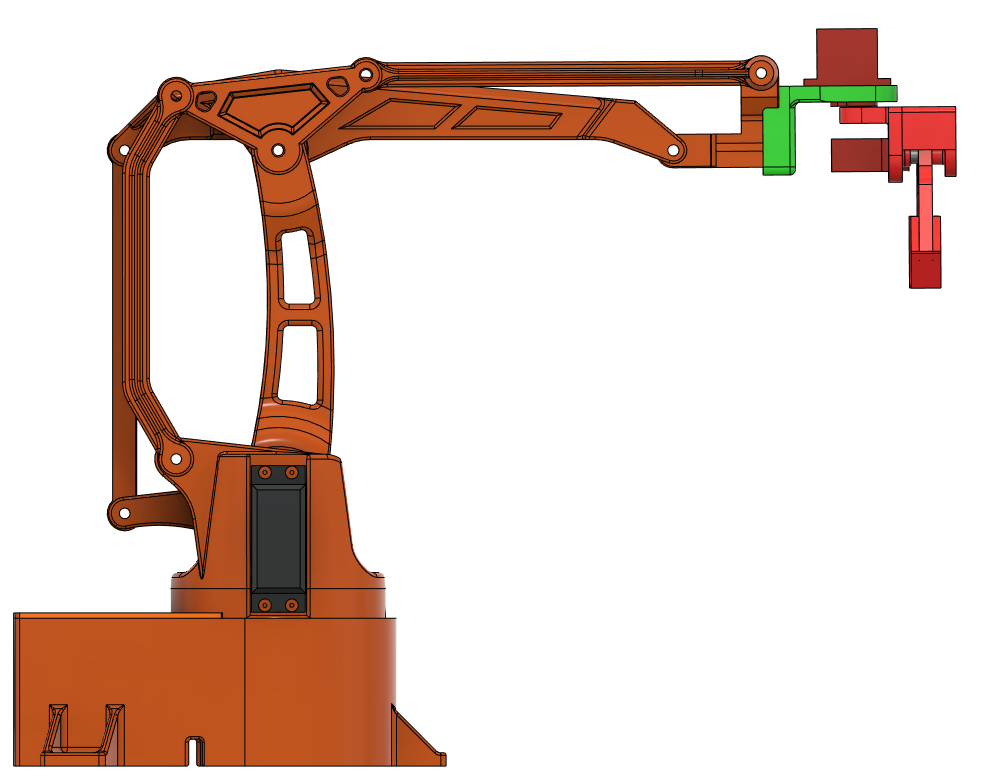
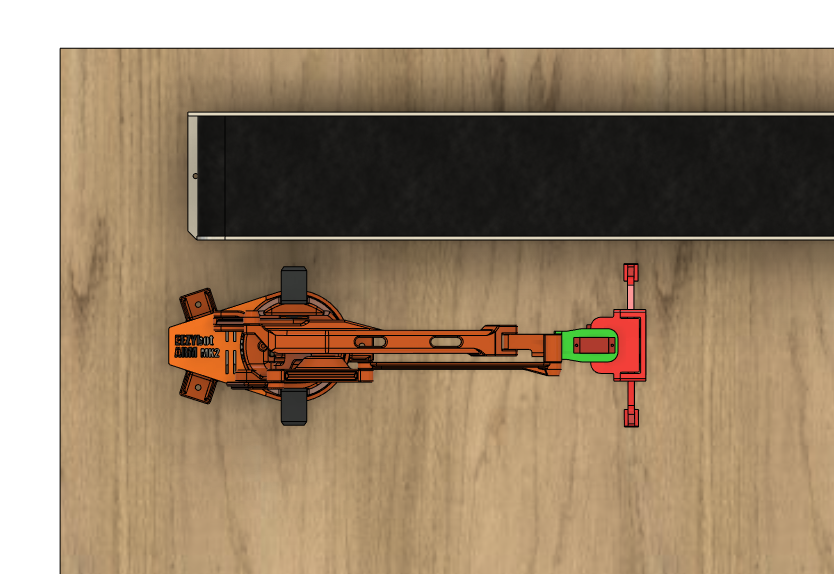
9Instalar brazo MK2 en la base
De forma paralela a la banda, alejado con respecto a su centro y el borde de la banda a 80 [mm] y con sus perforaciones traseras en línea con la de fijación de la banda.
![]()
-
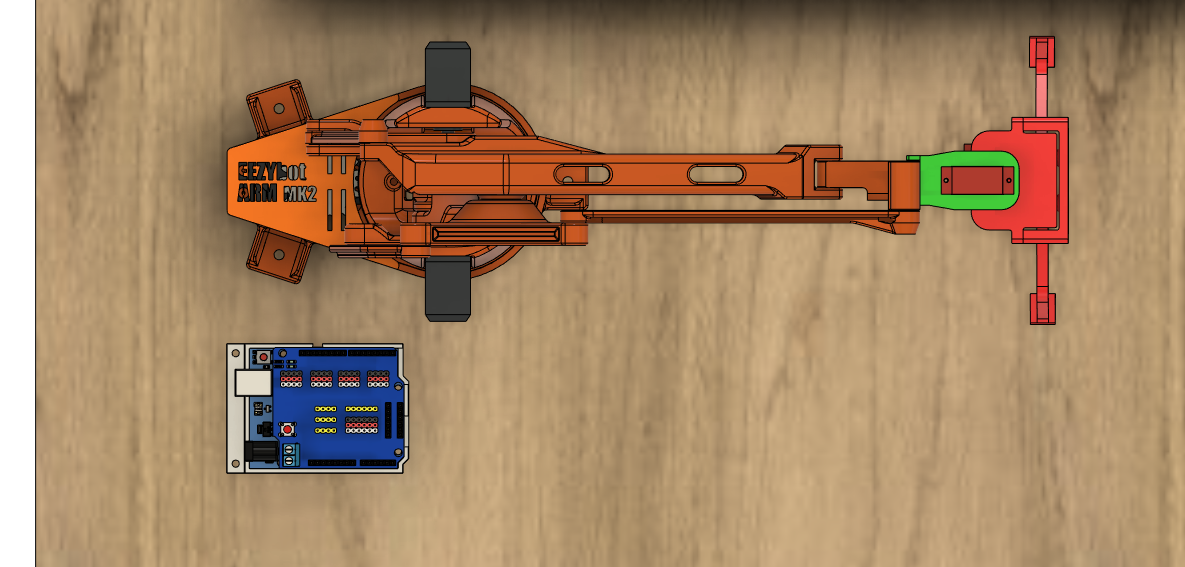
10Instalar el Arduino a un costado del brazo robótico.
![]()
MKlap2: Pick and place with MK2 arm
Implementación de brazo MK2 para recoger objetos en movimiento en una banda transportadora



Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.