 Mike Rigsby
Mike RigsbyAbout 65 years ago, "Robert the Robot" entered the world.
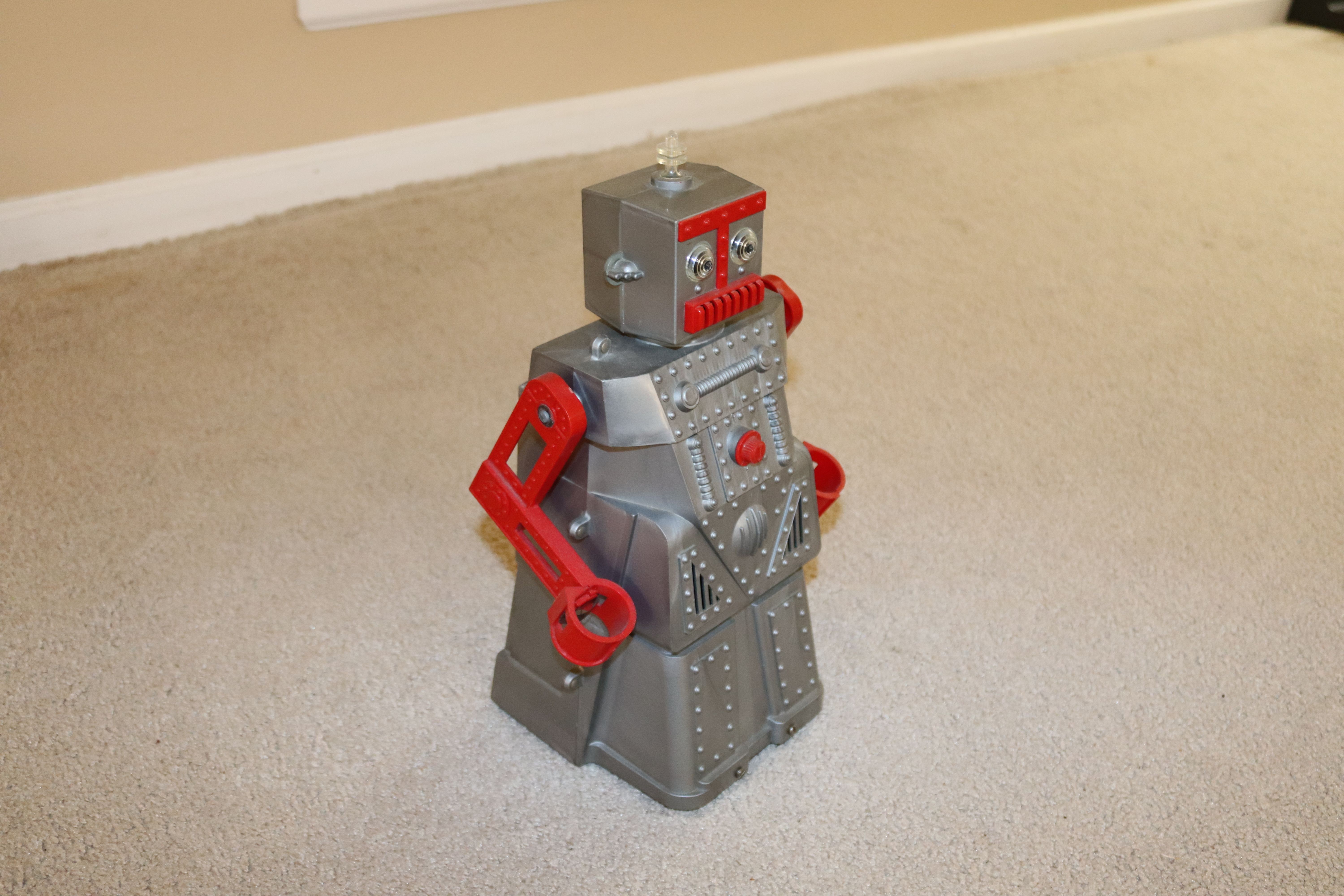
Robert is a remote control toy; moves forward, back, left, right; arms move, head illuminates; he talks. The "remote" control is a five foot length of steel cables. Forward and reverse motion are controlled by a hand crank that turns a gear mechanism for the rear wheels.

The rear wheels are connected by rods to the arms.
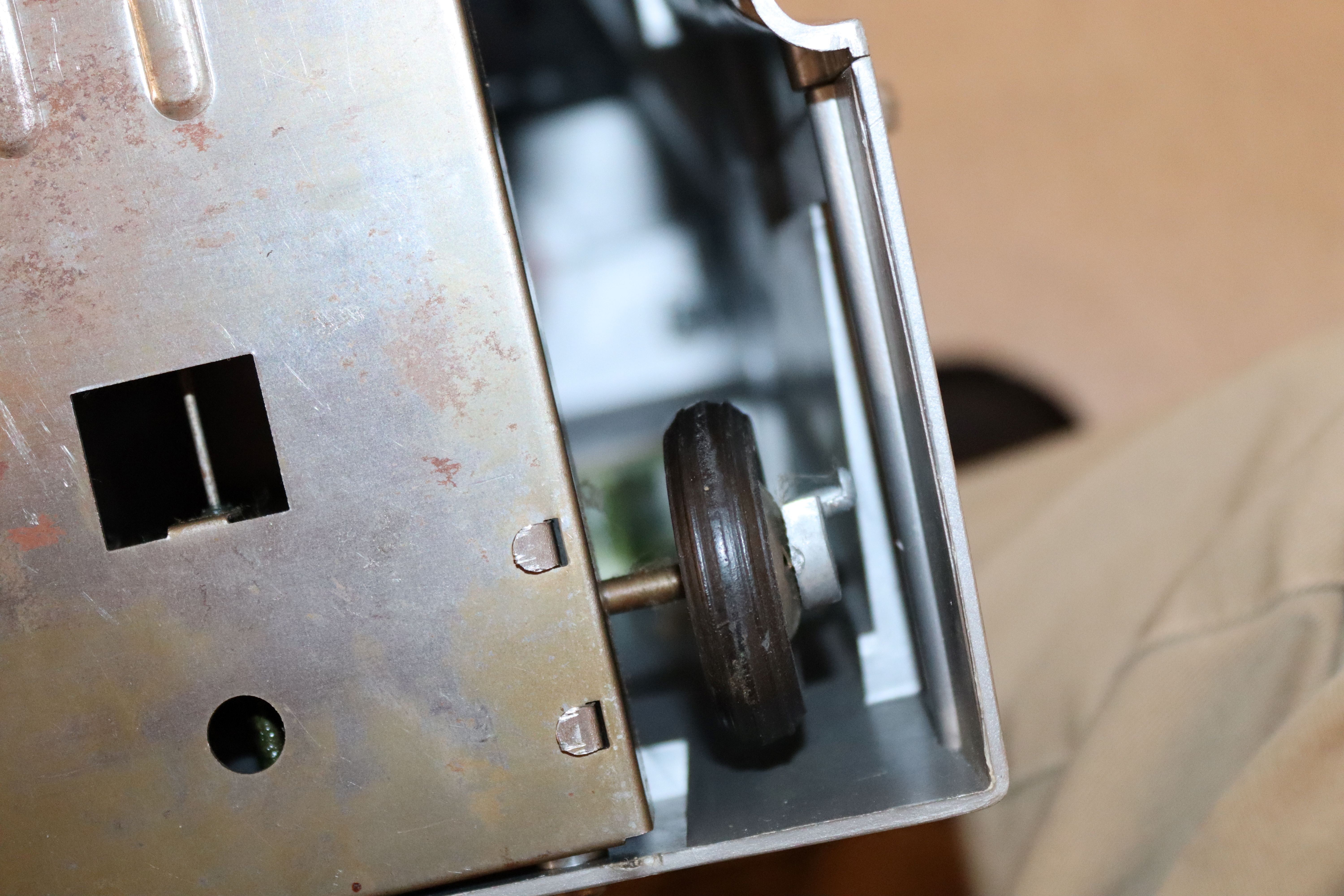
Steering is managed using a pistol grip on the controller. The front "steering" wheels are spring loaded to one side. Pressing the pistol grip changes the position of the steered wheels.

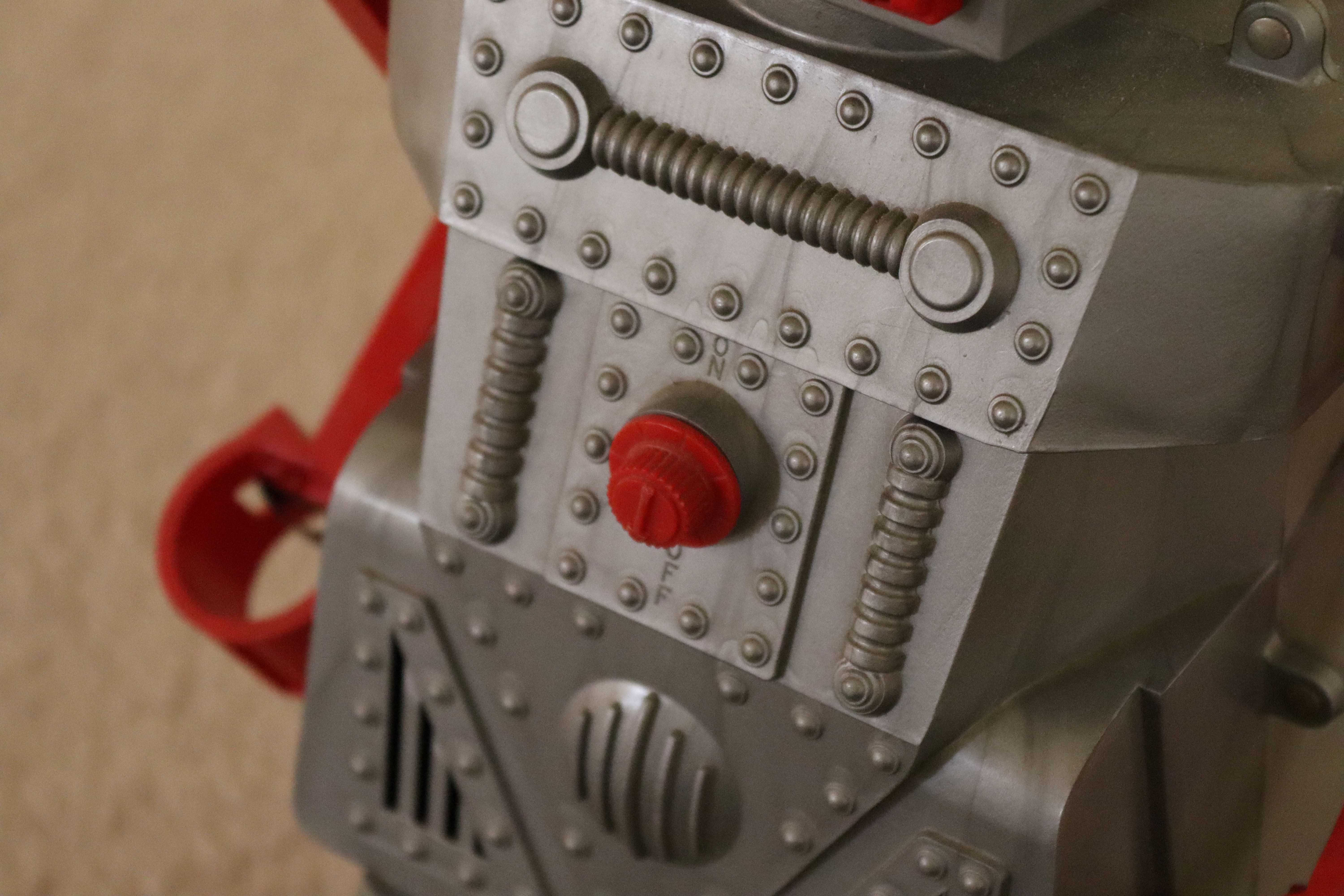
The light in his head (operated by a D cell battery) is switched by a knob on the front.
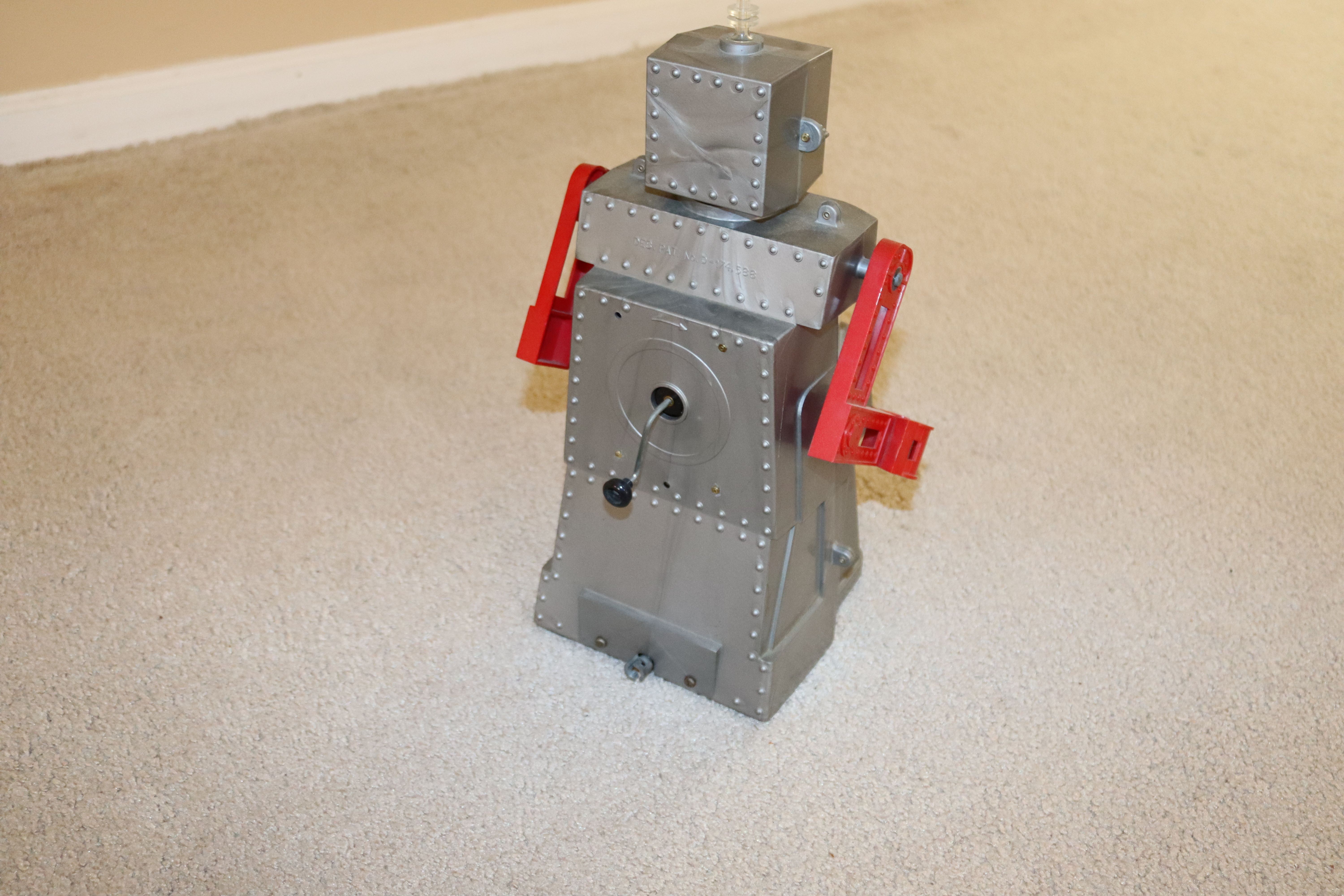
Voice is created by playing a record (hand crank on back).
Voice is limited to:
"I am Robert Robot, mechanical man.
Drive me and steer me,
Wherever you can.
I am Robert Robot,
Mechanical man."
Why does this matter? Early "robots" were remote controlled by mechanical cables. Later, electric motors (controlled by wire and switches) replaced the mechanical cables. This was followed by wireless (radio) remote control. Next came internet control (really just long distance wireless). Now, add a camera, microphone and speaker--just "Robert the Robot" for today.
In 1999, I acquired an Aibo, robot dog.

This was declared to be "an entertainment robot." That's what it did and that was enough. Aibo started "life" as a puppy (could barely stand) and "developed" over time. Aibo learned and reacted to his surroundings (mainly by petting for encouragement, head taps for discouragement). We had a French film crew at our house to tape our robot and reactions for a production, "Robots, Man's Best Friends?" They had been to Japan (talked to the Sony VP in charge of Aibo) and had taped a Japanese couple with their Aibo. The interviewer was shocked and a bit scared by what she saw. Our Aibo (brought up in a house with my wife and two daughters) was very "friendly," wagging its tail and approaching everyone for interaction. Our Aibo loved to chase the pink ball and kick it given any opportunity. The Japanese Aibo (raised by a hard working, rarely at home couple) was aloof, indifferent and hardly interested in the ball. The only difference was the way they were "raised."
Aibo was quite expensive and mechanically complex. Servo motors in some joints eventually developed "the shakes." Potentiometers in servo motors wear out and the feedback loop can't handle this. Aibo's special servo motors are not available. The lithium batteries (I have three) don't hold a charge and they are unavailable (special design). My Aibo is now an expensive toy that can't leave the charger (no battery) and shakes its head wildly (servo motor problem) on the charger.
Cozmo is a desktop robot (discontinued).

This little character could recognize faces and navigate around specialized cubes. The battery (not user replaceable) failed and that ended its usefulness for me.
Loona (it can be ordered but is not immediately available) navigates independently and can respond to certain gestures and voice commands.

Loona may be able to recharge itself (the charging dock has not shipped). Loona does not have a user replaceable battery. After about 30 hours of use, my Loona developed a loud "screeching" sound and had to be returned for repair.
Enabot's EBO X (on Kickstarter, soon to be more generally available) is another of the "run around, charge itself, recognize people, interact remotely" class of robots.
I must mention Astro, Amazon's home robot. Astro is largely an entertainment/social bot--but it can manipulate real world things. It has a load bay, capable of carrying about 2 kg. A "treat dispenser" for pets is also available. Astro is capable of finding people, finding the charger and going to trained locations.
I have created three "accessories" for Astro. My accessories...
Read more »
























"Ozzy, bring me a cold one."