0%
0%
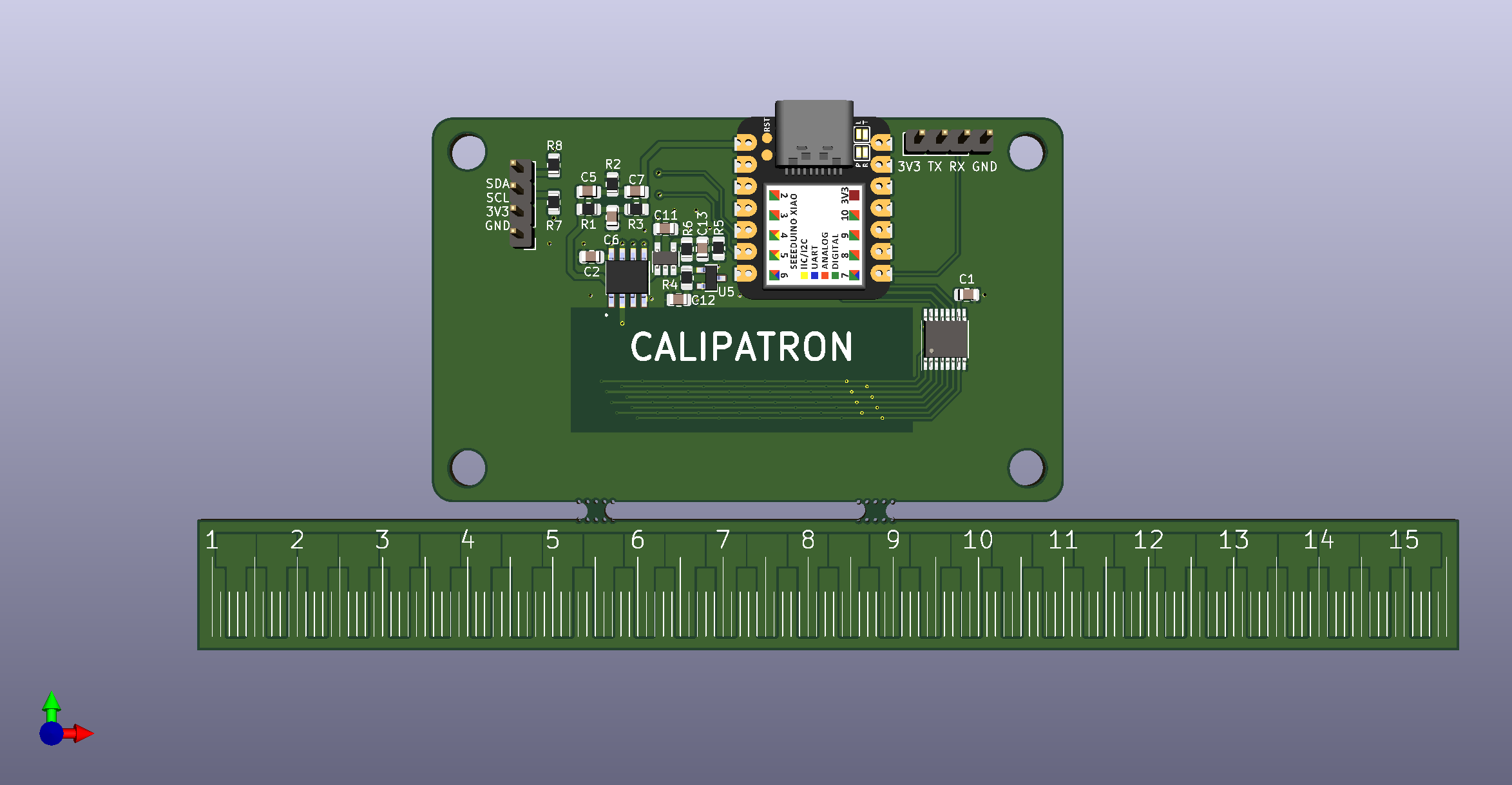
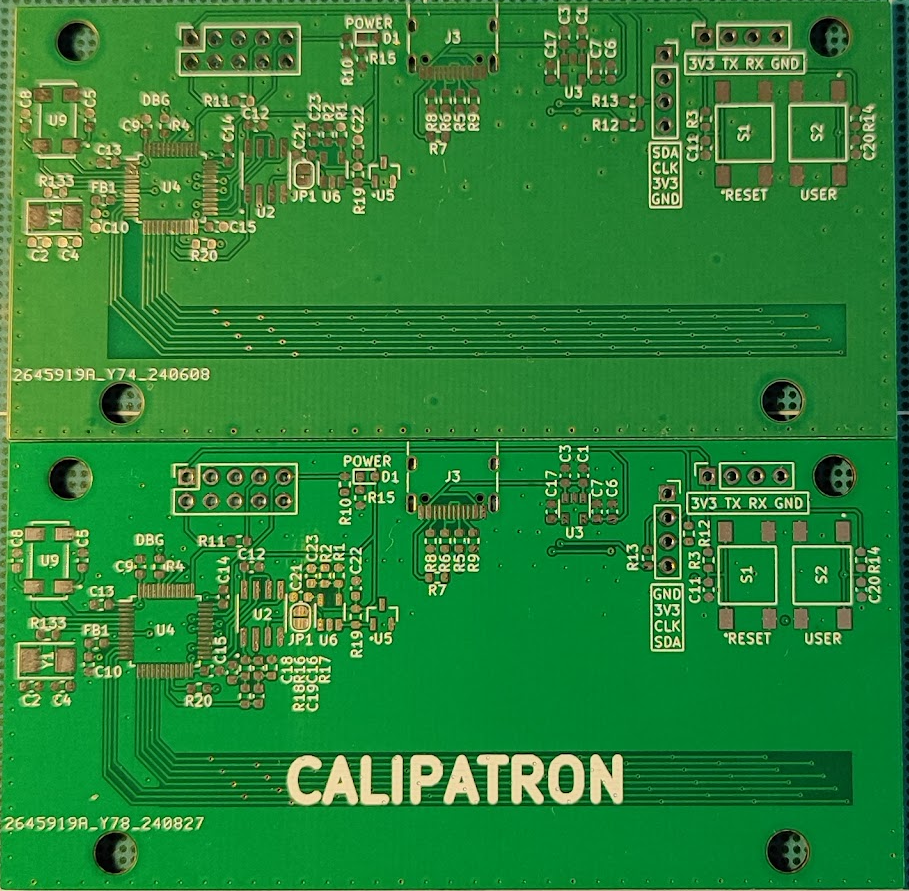
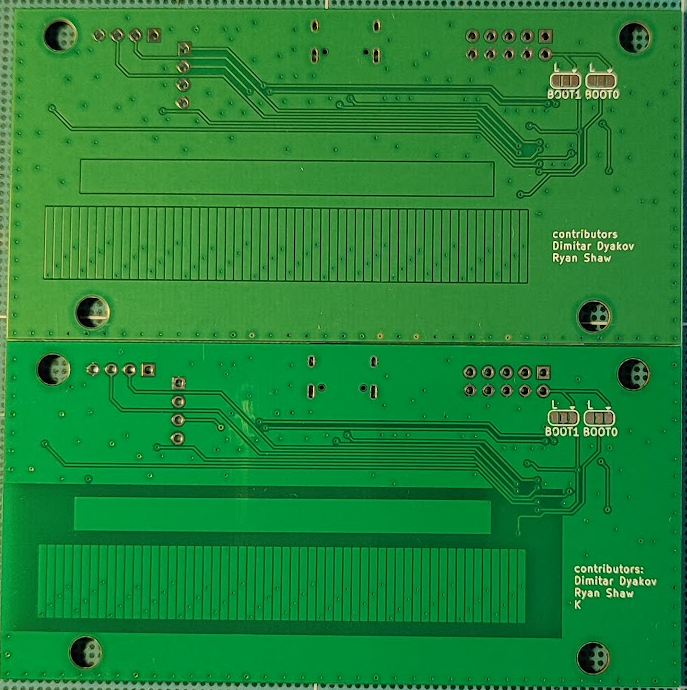
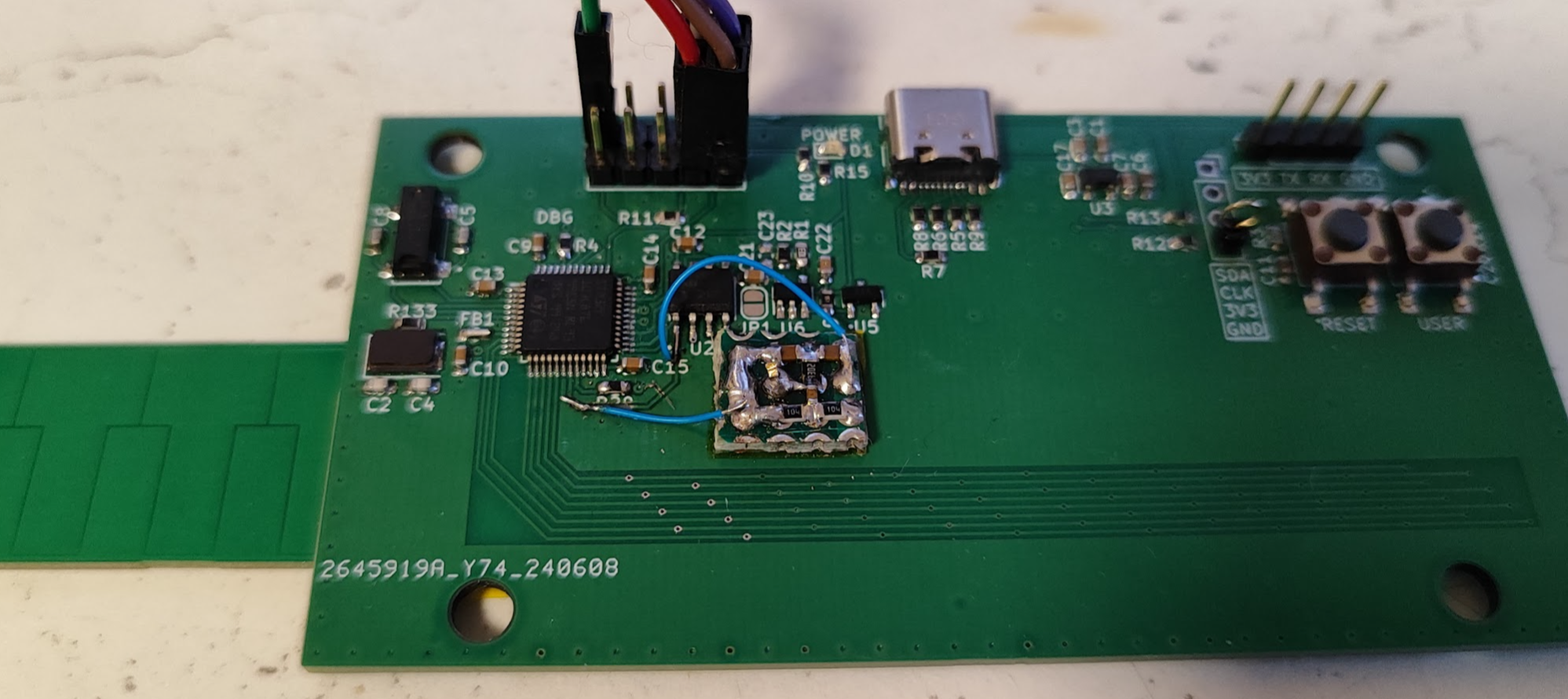
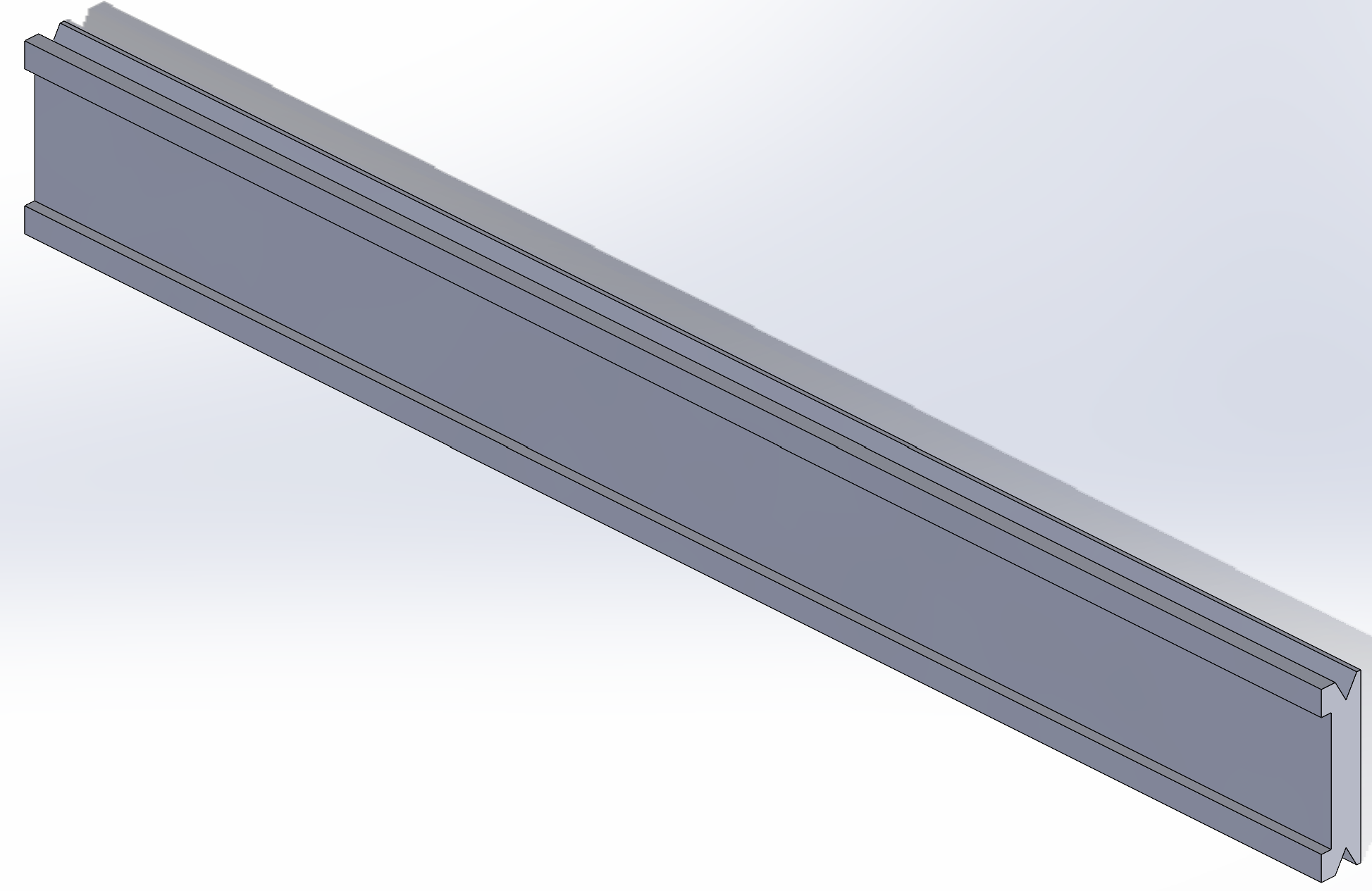
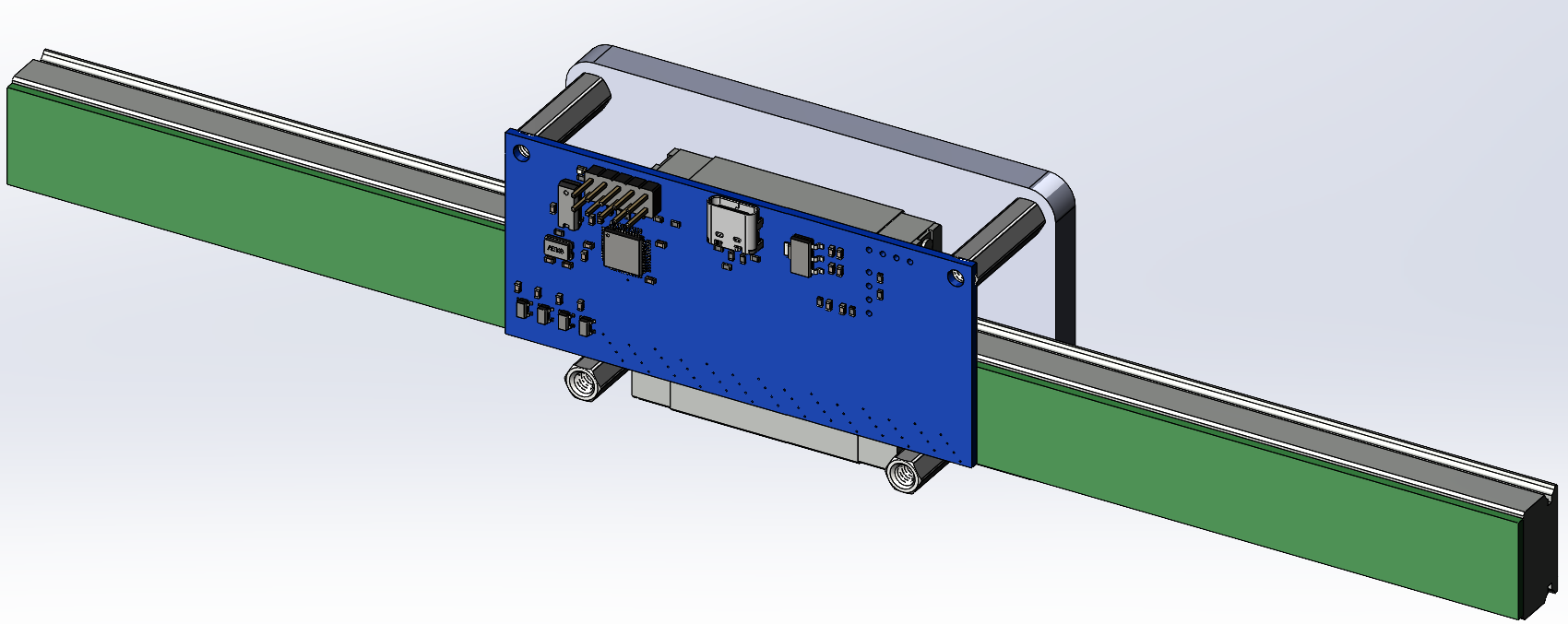
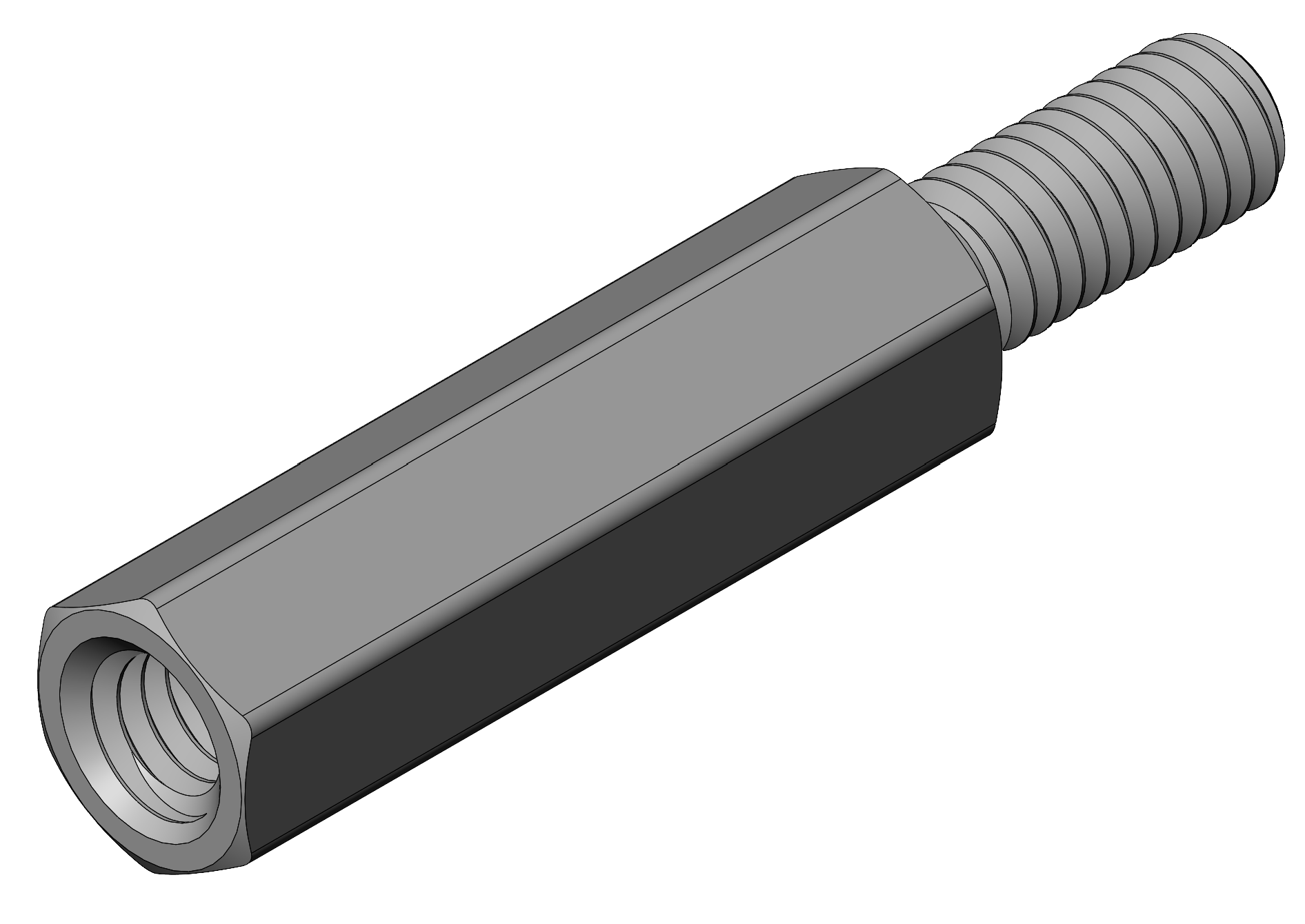
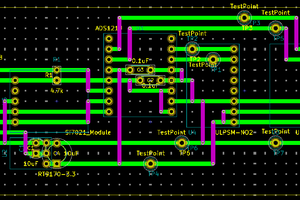
DIY Digital Caliper - CALIPATRON
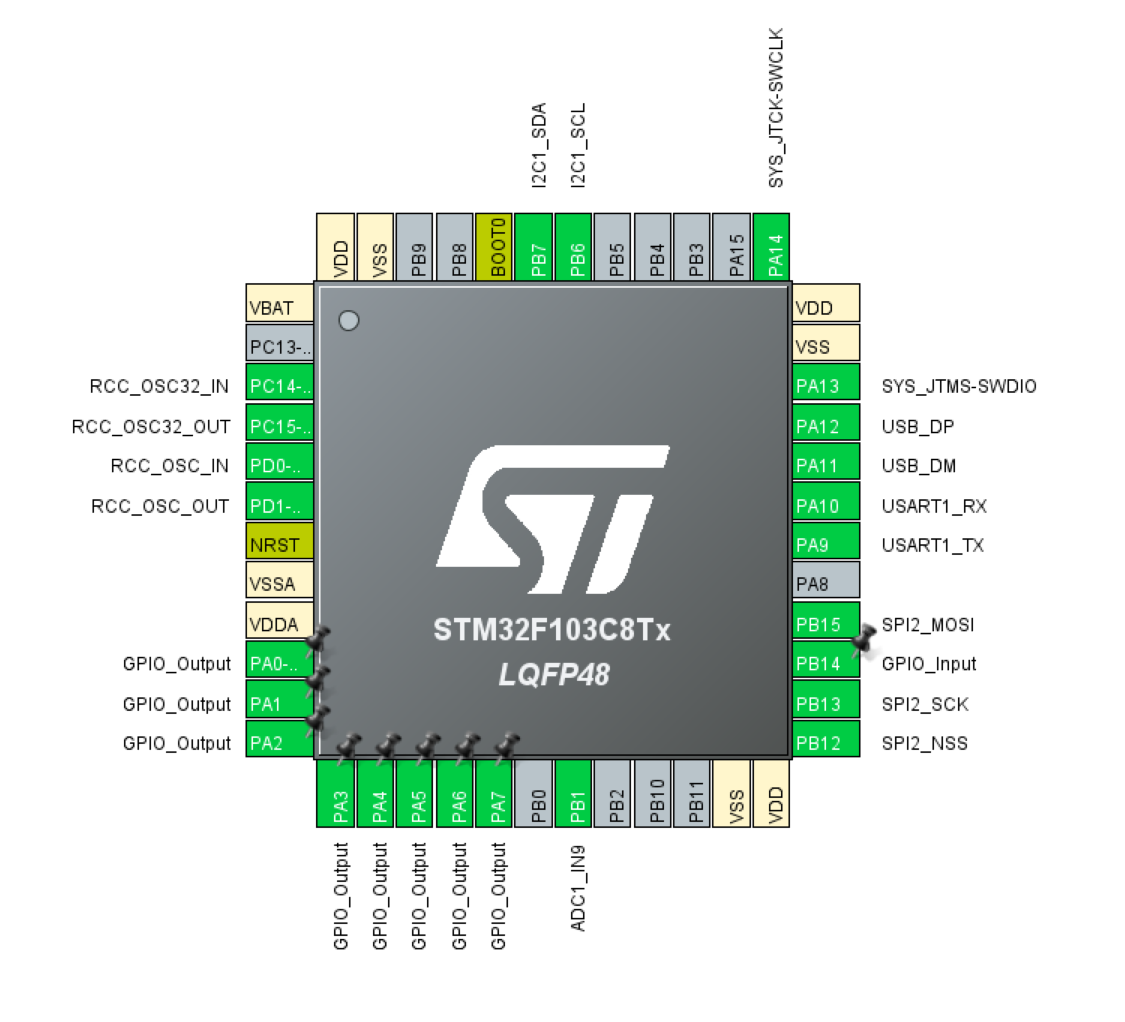
I design my own digital caliper based on STM32F103 blue pill (and more).
 Dimitar
DimitarBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
















 Mike Teachman
Mike Teachman
 zacnotes
zacnotes

hi where is software?can i make this caliper by arduino?what is the code in arduino?/
tnx