Assembly Pack and Go and Assembly Exploded View video
Need Statement
- Matt and his team need a way to collect antarctic under-ice flora and/or fauna using the modified BlueROV2 provided so that they can expand the current capabilities of the Subzero UROV.
Significance
- Our payload will be used to further the research of Matt’s team in the Antarctic. Ideally, our attachment will be used for a wide variety of sample types, however, it is specifically designed to collect brittle stars. One specific study these samples will contribute to involves DNA analysis of two different species of brittle stars found in the region.
- Our system is designed to utilize open source hardware and can be modified to suit other UROV designs for various sample collection purposes.
Stakeholders
- Queensland University of Technology
- Australian Antarctic Division (Australian Government)
- Matt Dunbabin- CI who has been asked to use UROV for sample collection, the stakeholder we have direct contact with
- Researchers aim to collect samples of flora and fauna along the antarctic seafloor using the UROV. For this task, an attachment to the UROV needs to be developed.
- Sea life- don't heavily disturb populations/environments
Project Background
- Professor Dunbabin was asked to modify a BlueROV2 for use in an Antarctic research expedition. His modified UROV, called Subzero, will be deployed through a 40cm hole in Antarctic ice, and upon reaching the floor, will collect flora and fauna samples. The intended samples are brittle stars & algae & seagrass. They will be used for DNA analysis to gain a better understanding of the life in the region.
Critical Requirements and Specifications
More details can be found in the requirements/specs Excel file.
| REQUIREMENTS | SPECIFICATIONS |
| Retrieve samples | - stores and collects multiple samples |
| Reach sea floor | - operate at an expected depth of 100m below sea level, with a max depth of 150m. |
| UROV operates without entangling flora and excessive disturbance of sea floor | - operate from 20-30cm above the sea floor |
| It fits within a 40 cm hole | - fits within the diameter of Subzero UROV: 350mm - sample storage fits within the length of payload space: 200 mm |
| Integrates with UROV system | - operates within the camera's line of sight - utilizes <4 communication ports ( 4 available) - easily removable/attachable under 30 mins |
| Operates in Antarctic waters | - withstands water pressure at the sea floor - functions in freezing water and below-zero air temperature |
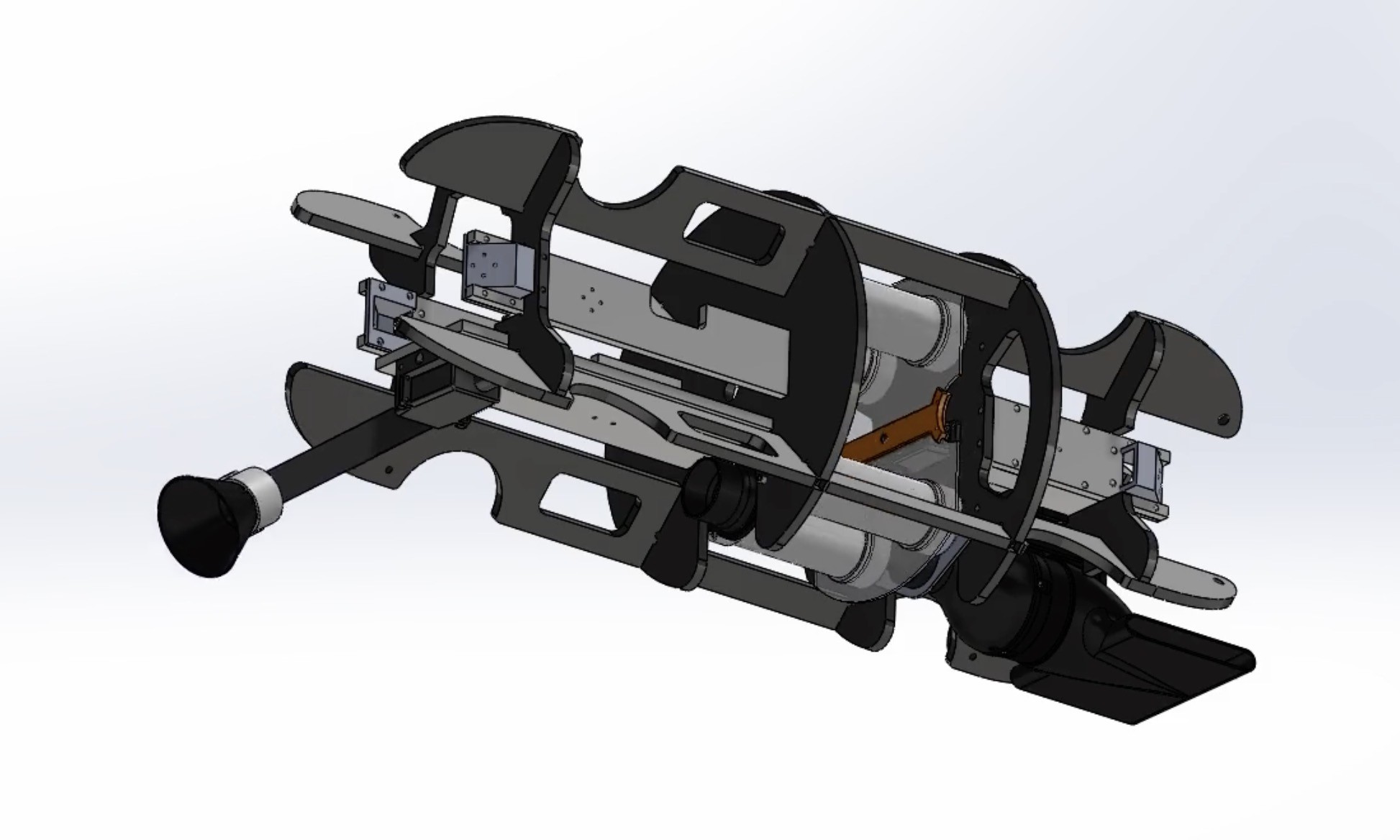
Design Process
We approached idea generation and brainstorming by considering the two main components we needed to address independently: the collection mechanism and the storage mechanism. A lot of our initial ideas for collection mechanism ended up combining with storage because they would only work for one sample. A core requirement is the ability to hold multiple samples, so these would not work. Below outlines the ideas we explored further and eventually settled on.
- Collection Mechanism:
- Grabber arm- complicated articulation mechanism to retrieve multiple samples
- Net- didn't fit in size constraints
- Suction
- Storage Mechanism:
- A lot of our initial ideas didn't work to store multiple samples, which was a main requirement.
- one big storage tub- weakened suction, no separation of samples
- net- didn't fit in size constraints
- rotating dividers within a big canister-> rotating smaller canisters
- A lot of our initial ideas didn't work to store multiple samples, which was a main requirement.
How de we create suction power?
- Use thrusters already on UROV?
- Use freestanding thruster?
- easier to design parts around, affects motion of UROV less.
Other questions we had to consider once settling on rotating canisters and suction:
- Will we have enough suction power with the gaps necessary in the system to allow rotational clearance?
- How will we attach suction tube to the UROV and articulate it?
- What are the buoyancy and weight requirements for the UROV?
- What size will our sample canisters need to be and how many can we have?
- How do we make the canisters and the whole...

 New Dexterity
New Dexterity
 morgan
morgan
 Peter Sinclair
Peter Sinclair
 Supercell
Supercell
In the year 2024, I am thankful for the invaluable opportunities to gain knowledge, remzi yilmaz putun the meaningful connections that have brought richness to my life, and the steadfast resilience displayed in overcoming challenges,nurturing not only personal growth but also a deeper understanding of life's complexities.