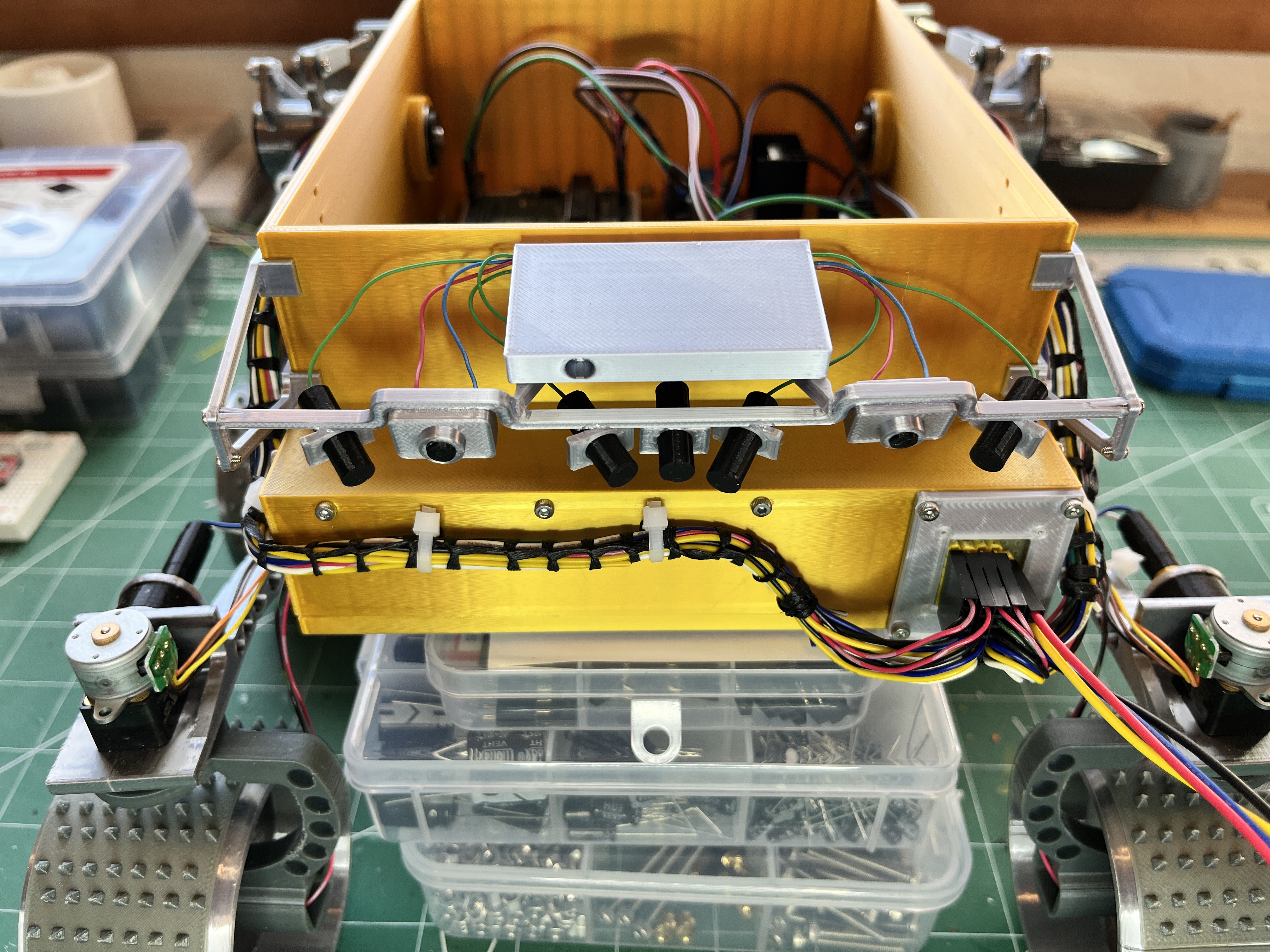
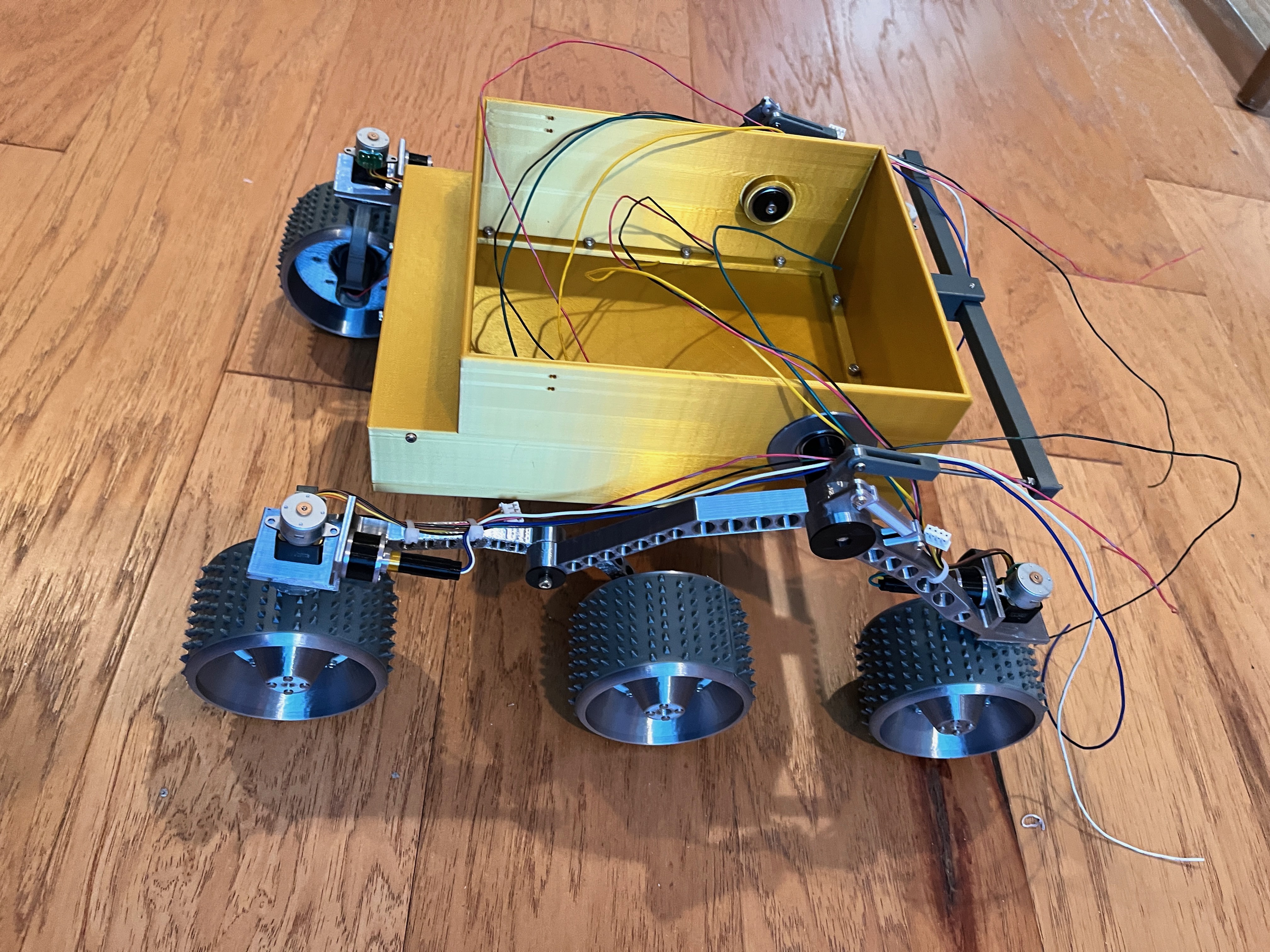
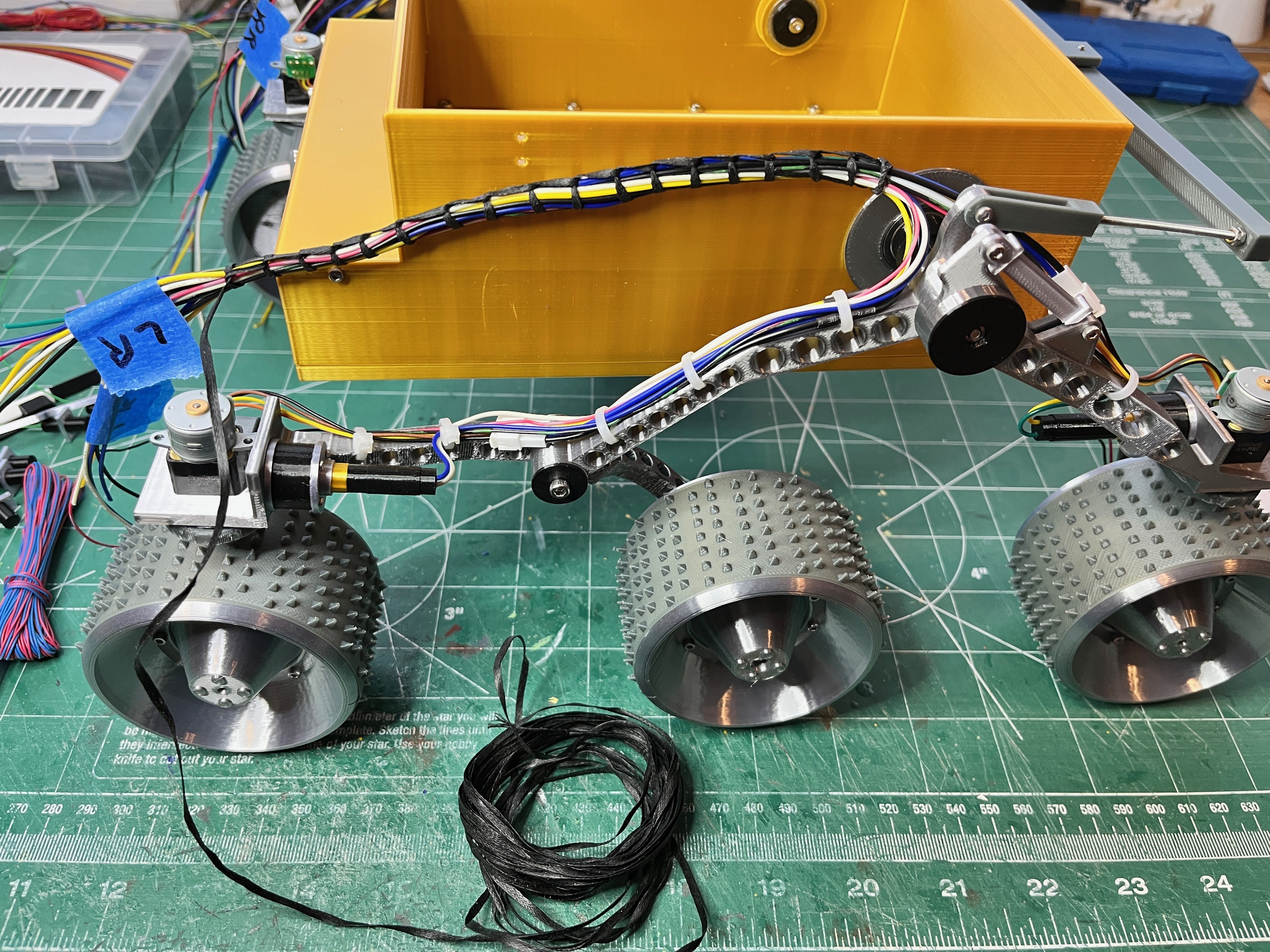
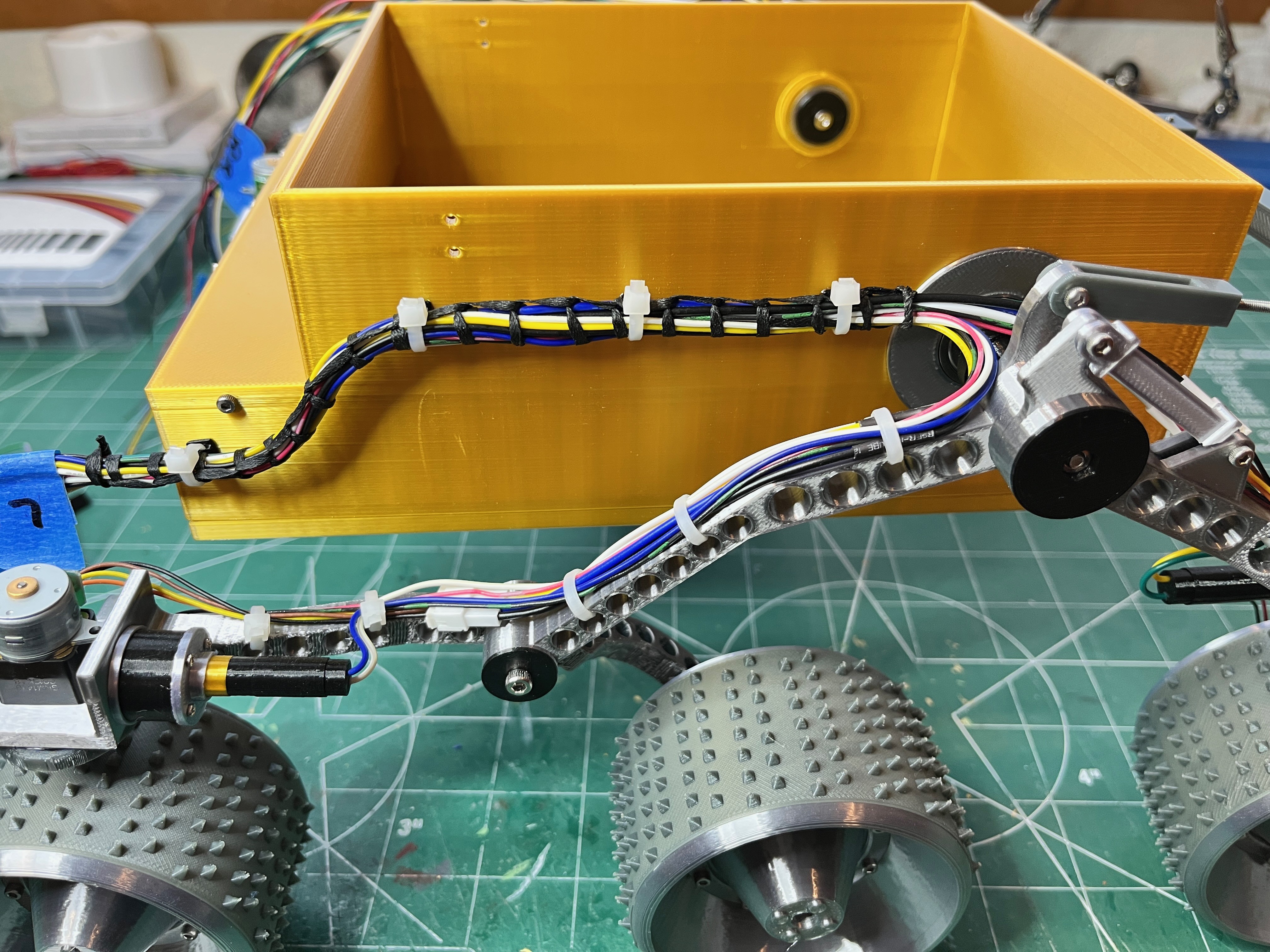
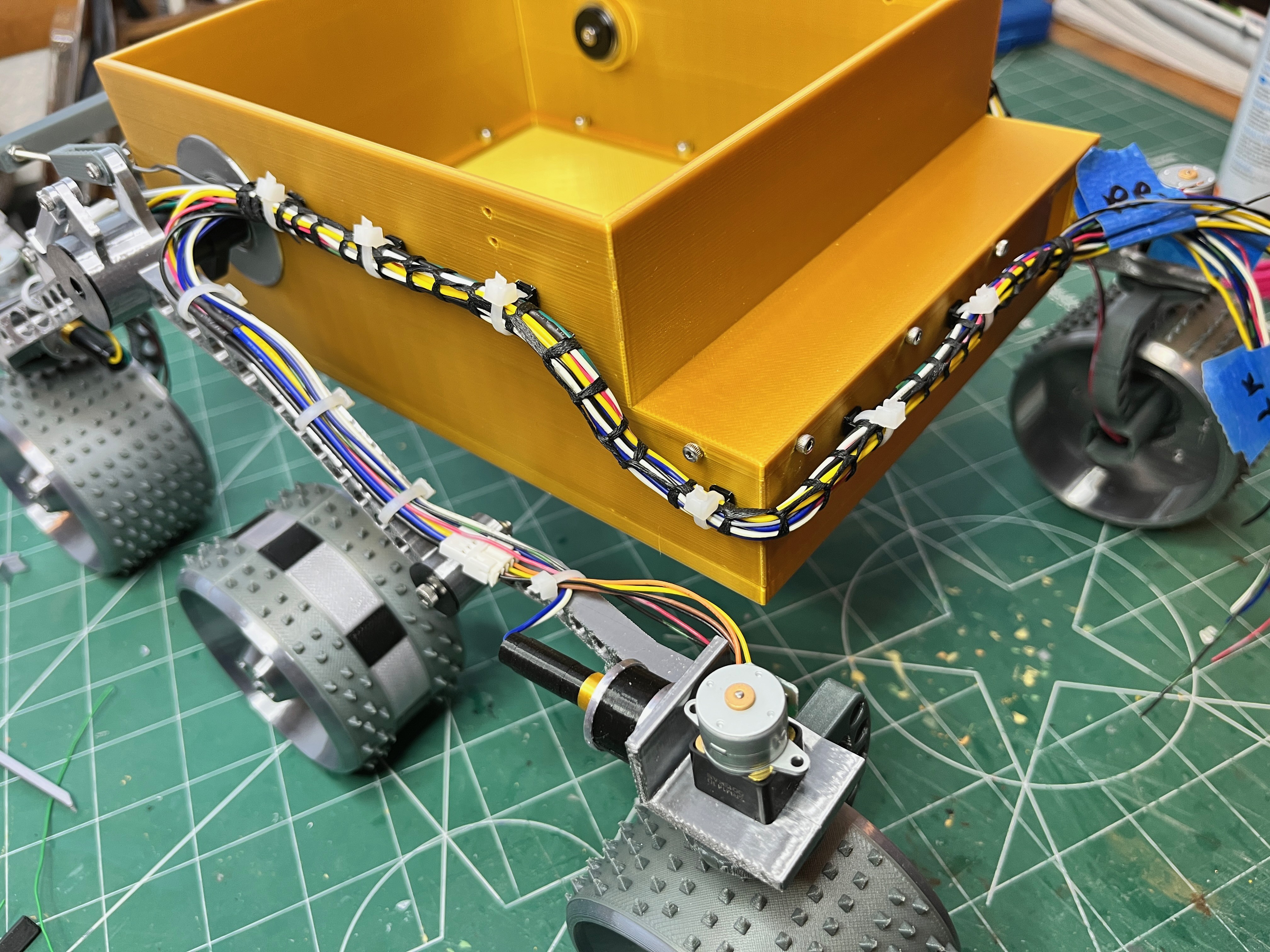
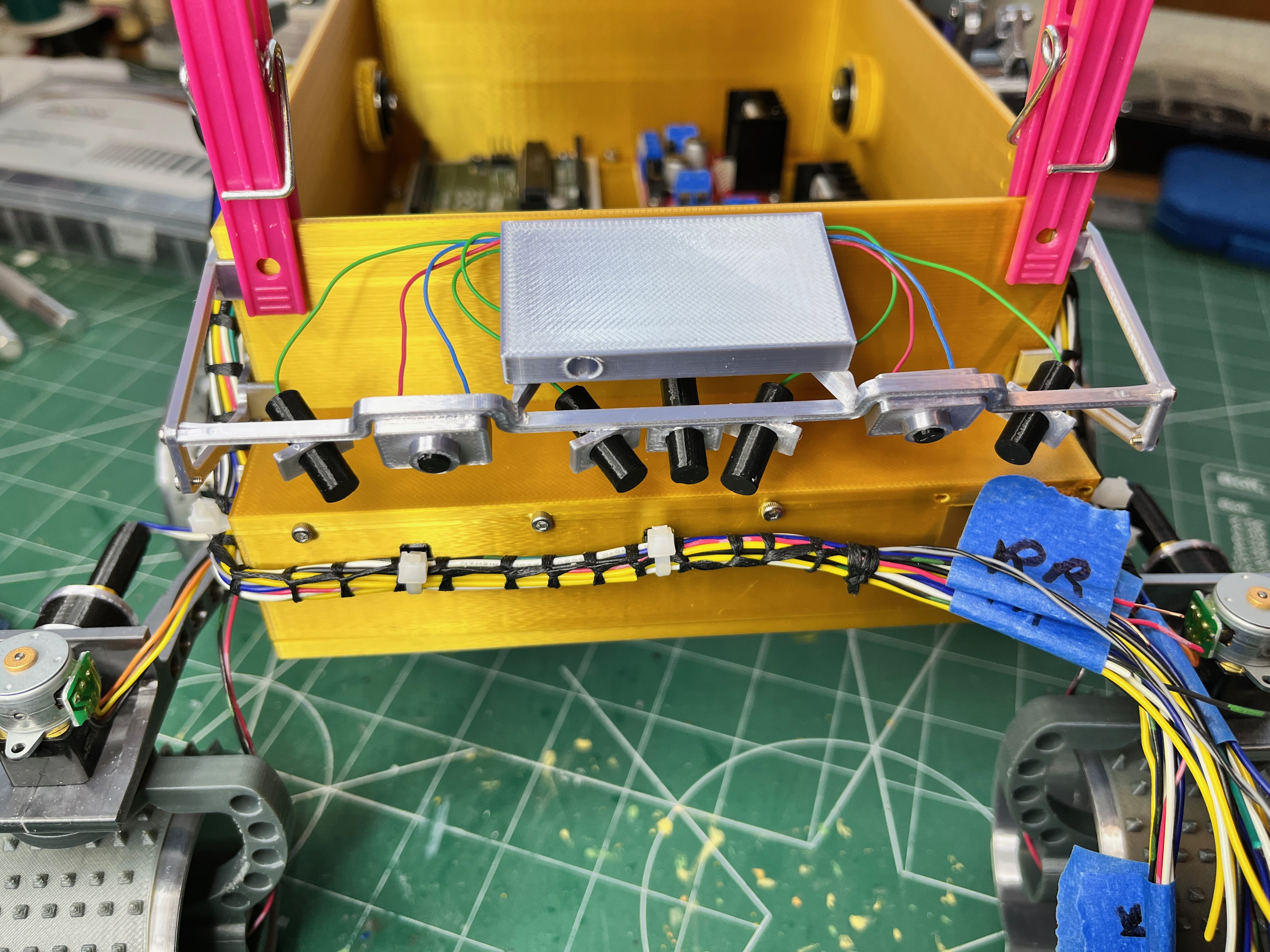
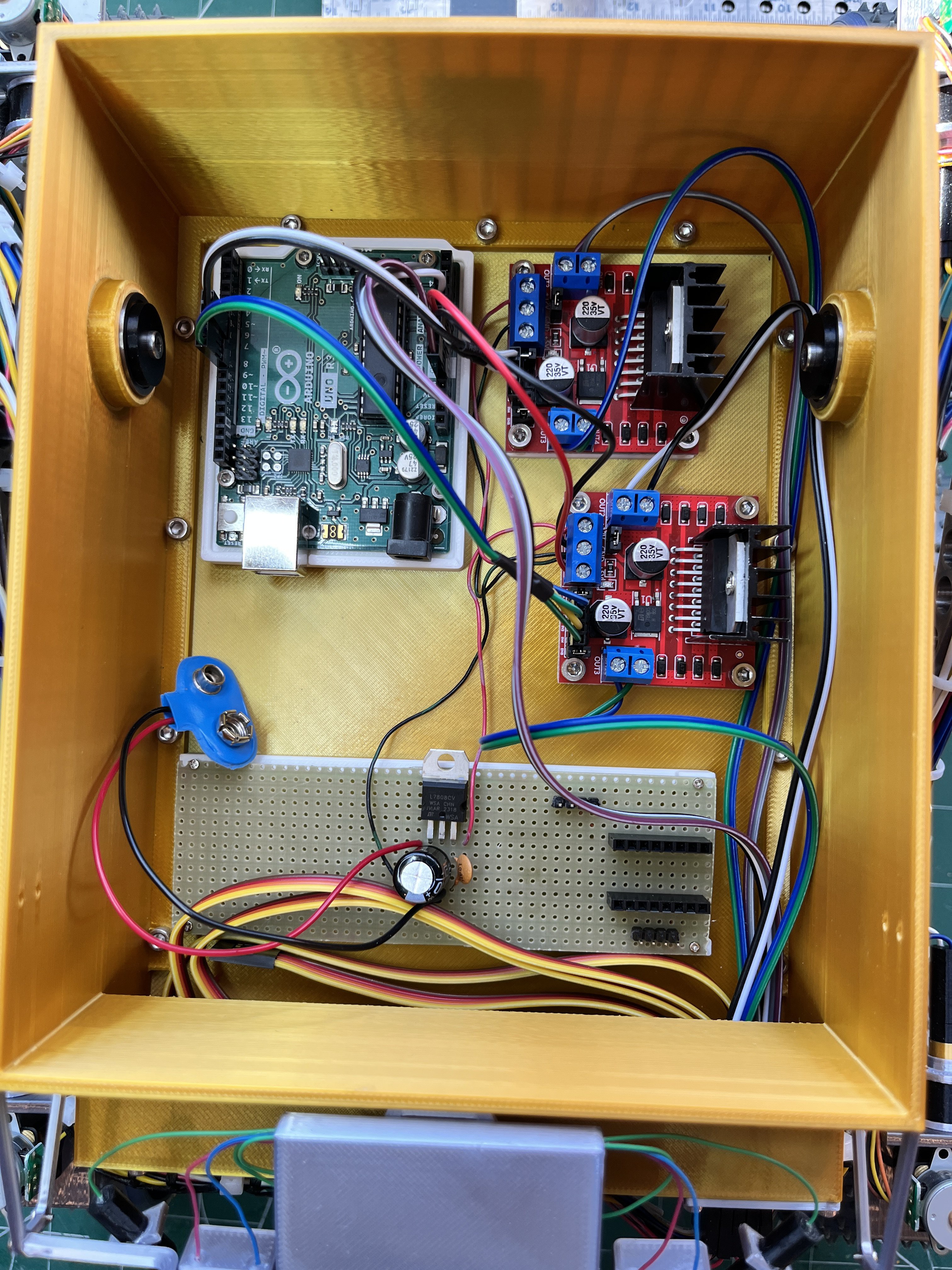
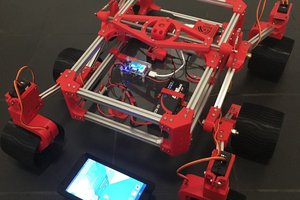
The real rover has six driven wheels. For simplicity only the four corner wheels will be driven and the two middle wheels will rotate freely. The steering is accomplished using four servos, one at each corner wheel. The go to steering maneuver for this rover seems to be turn the four corner wheels in and rotate in place. All of these motors will need motor drivers. For this I chose the L298N motor controller modules requiring 4 digital output pins. One module can drive two DC motors. Each stepper motor is driven by an A4988 stepper motor driver requiring 2 digital output pins. The directional input is via a joystick requiring 2 analog inputs. The total input/output count is 12 digital output pins and 2 analog input pins. A single Arduino Uno should work for this project.
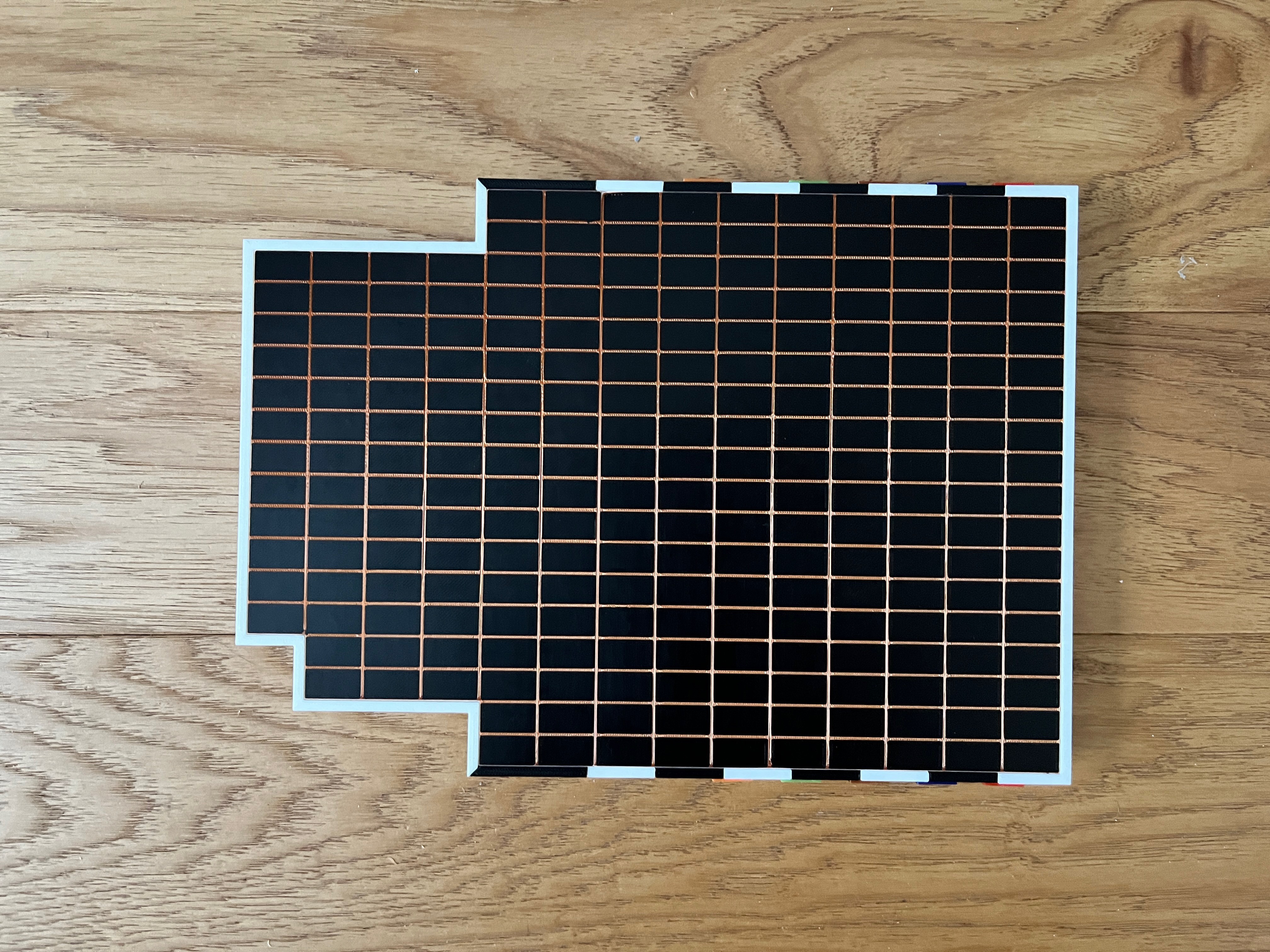
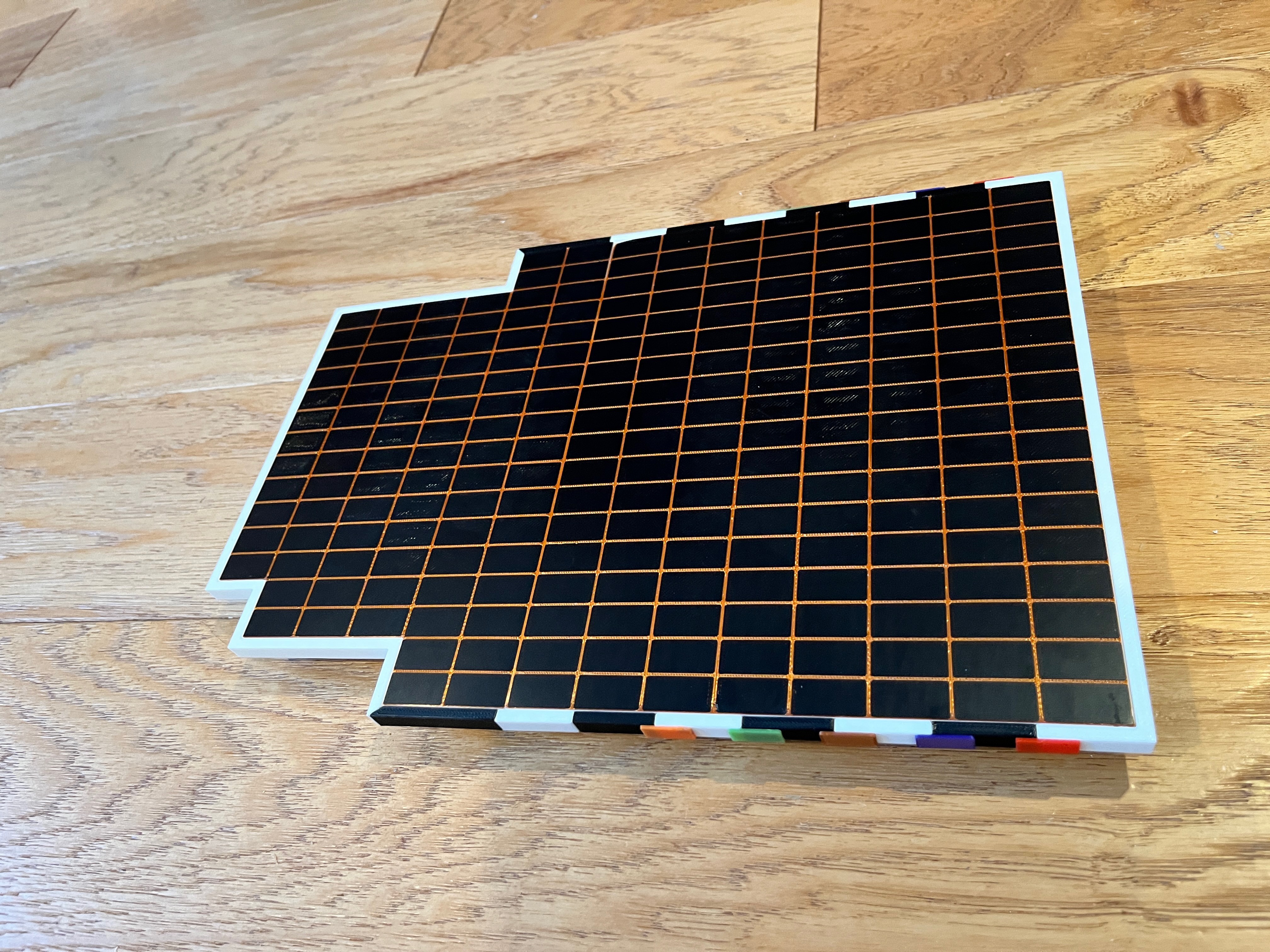
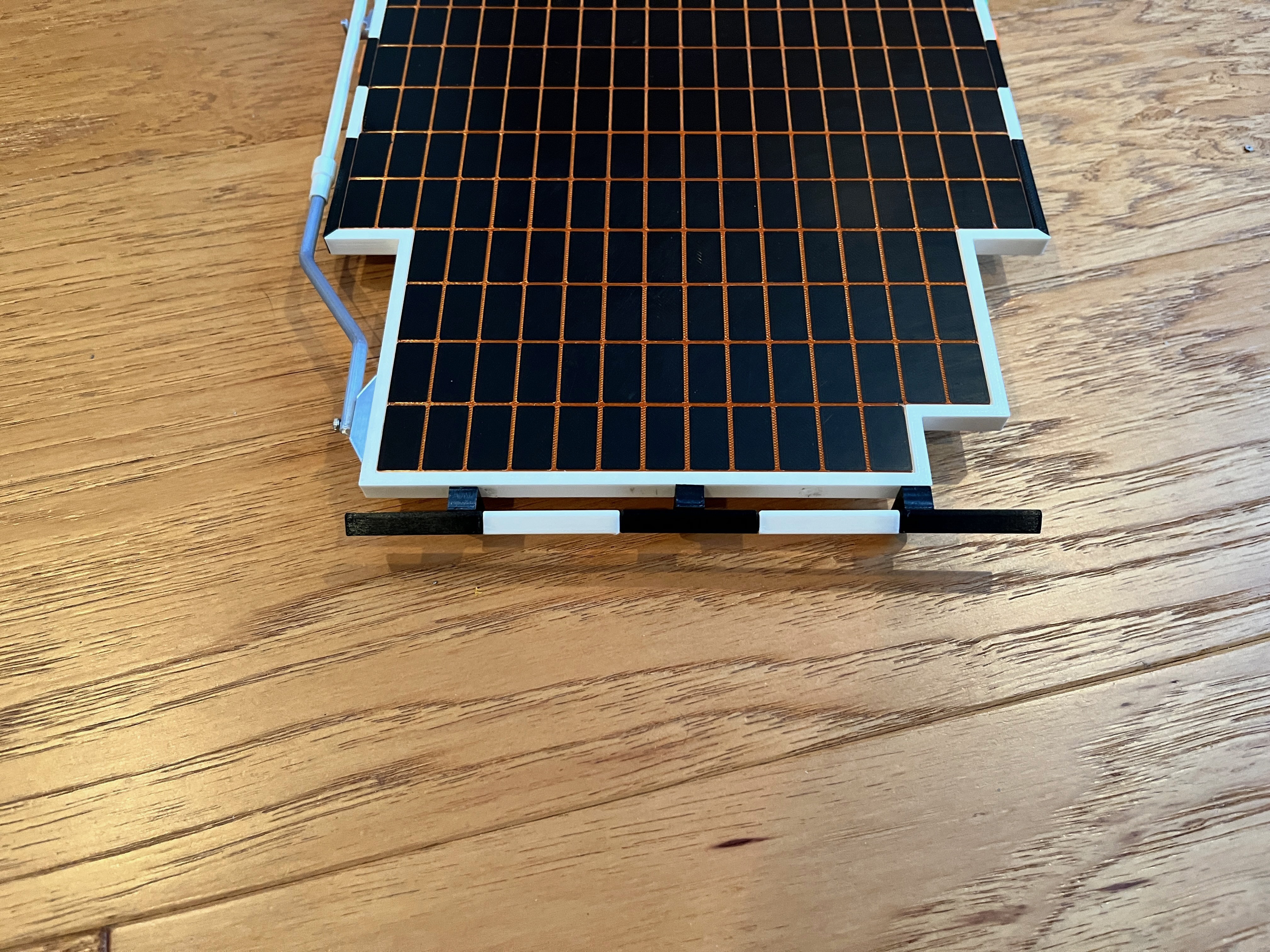
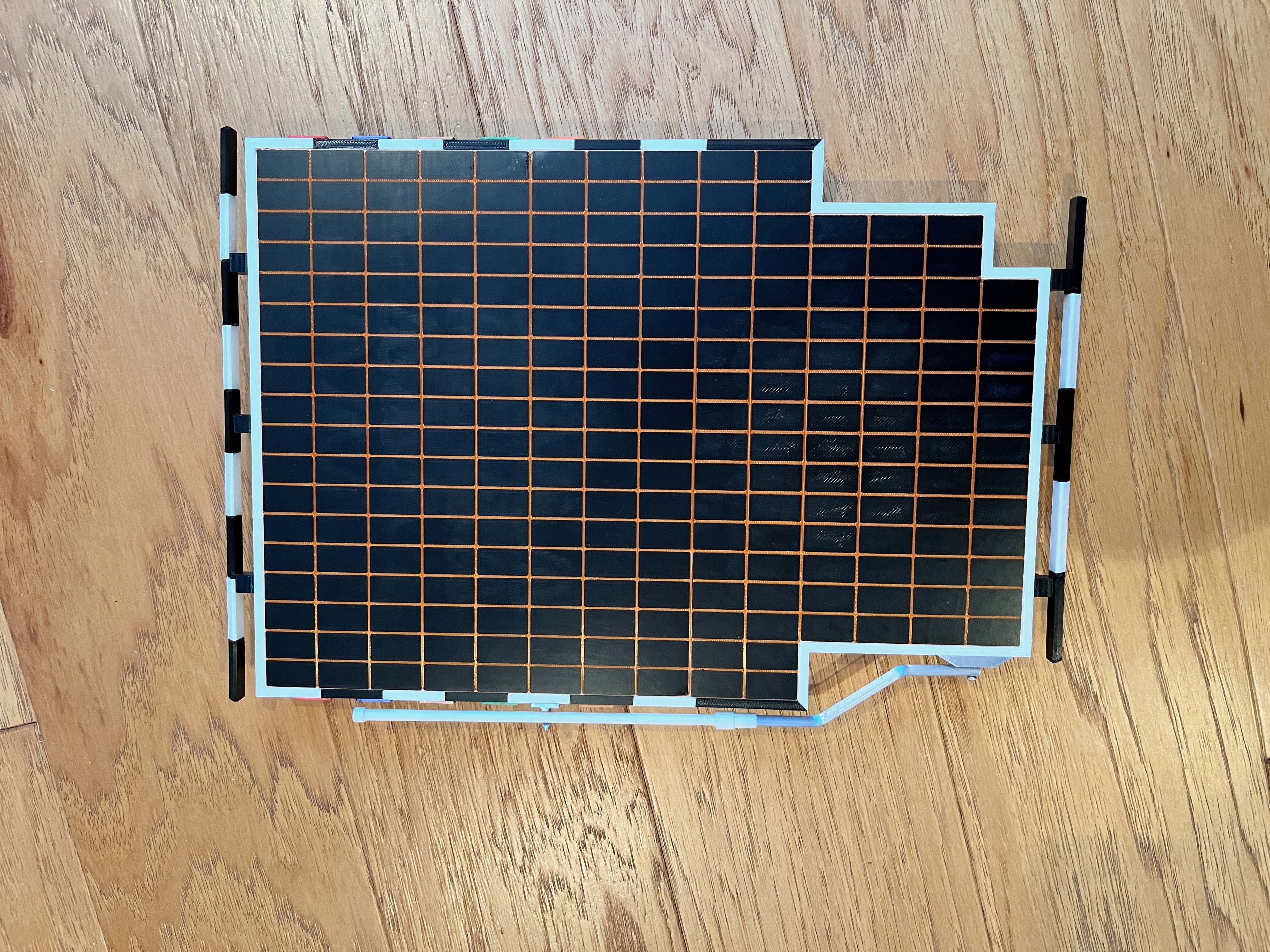
The color of the 3D printed parts are chosen to be as accurate as possible. Some of the parts are printed using filament changes to produce more accurate looking parts and keep the assembly to a minimum. One example is the solar panel. The base of the panel is white with a single height copper layer followed by black solar panel modules. Most slicers should be able to perform this trick including Cura and the Prusa slicer I use.
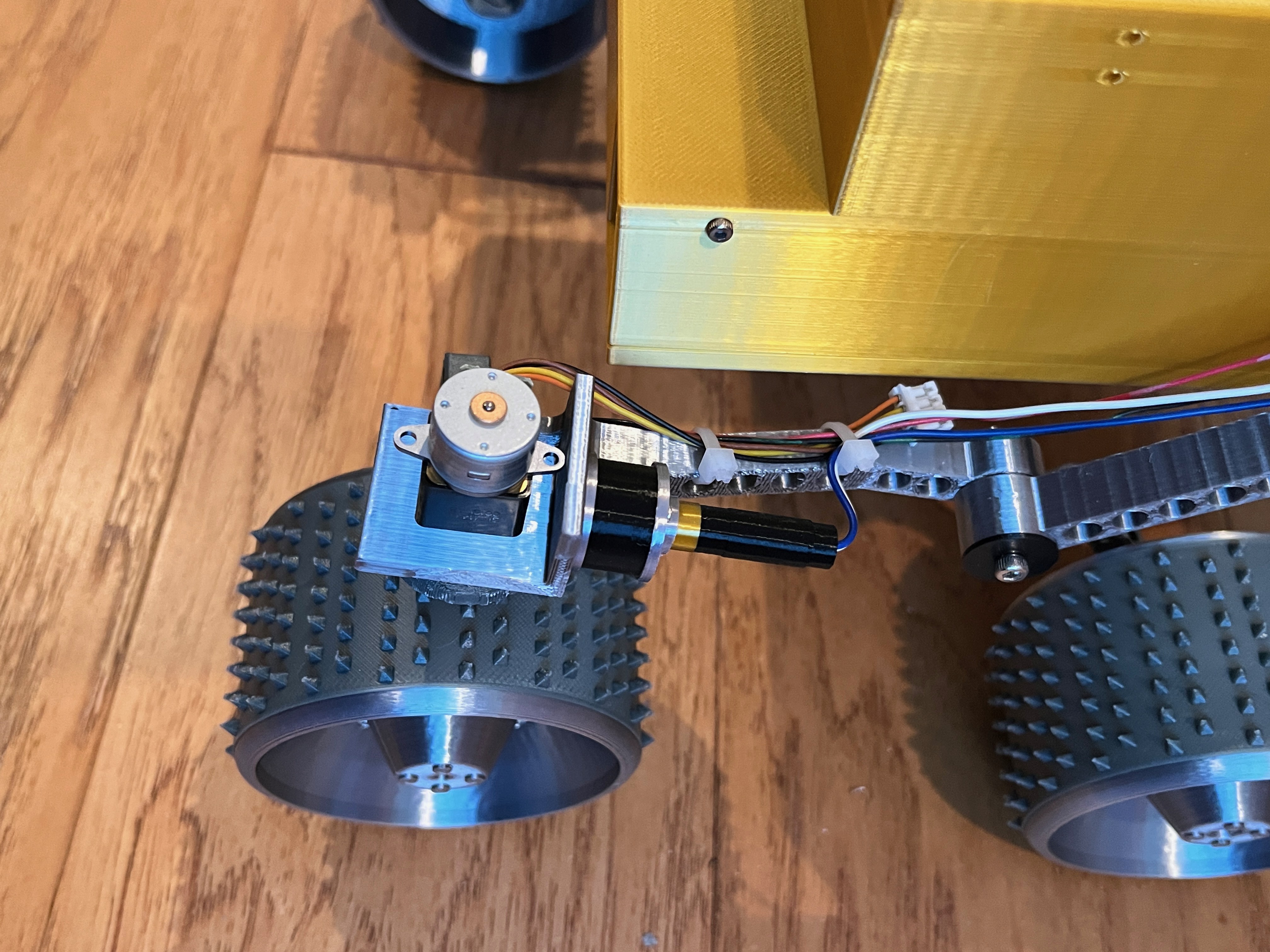
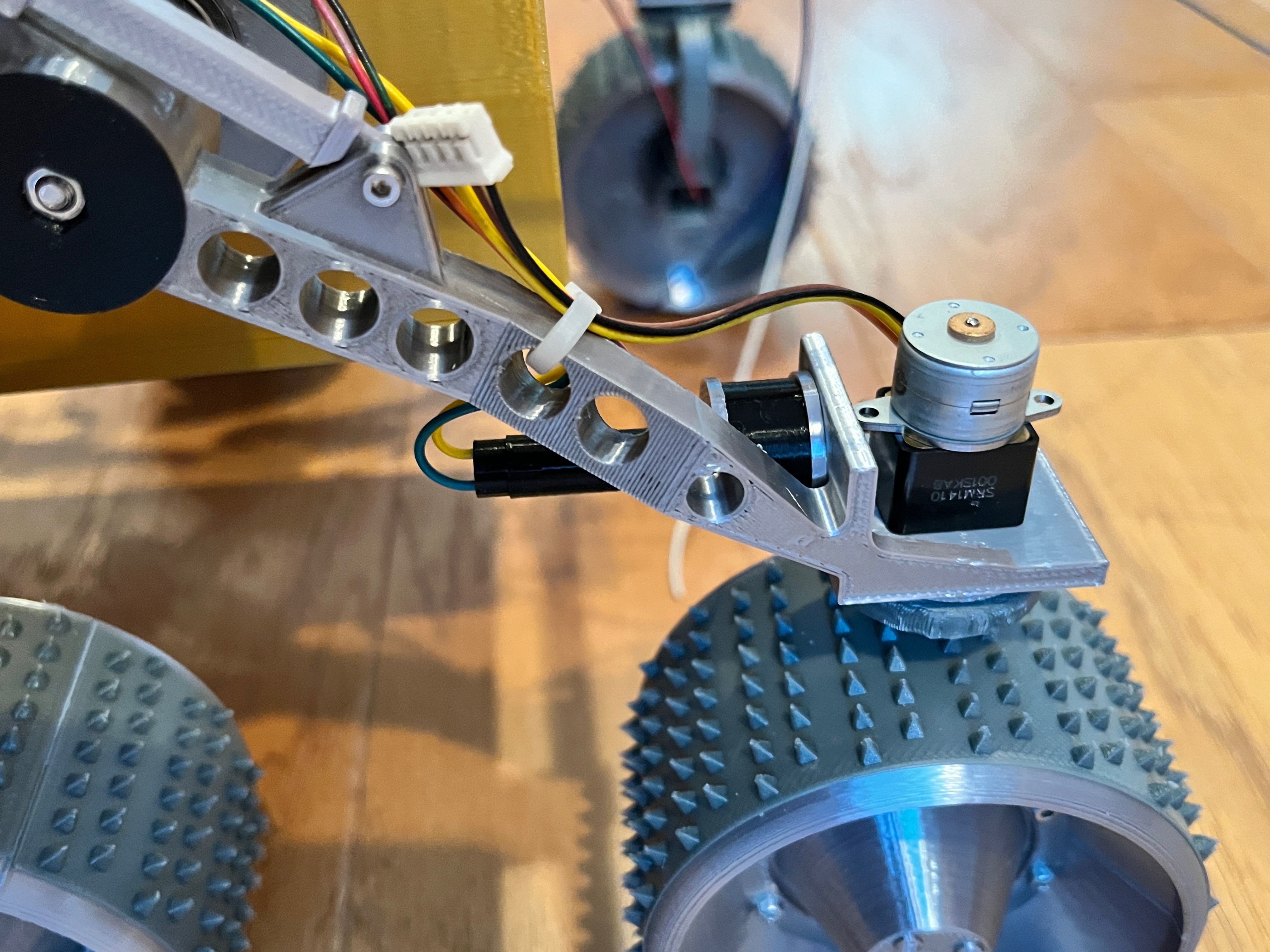
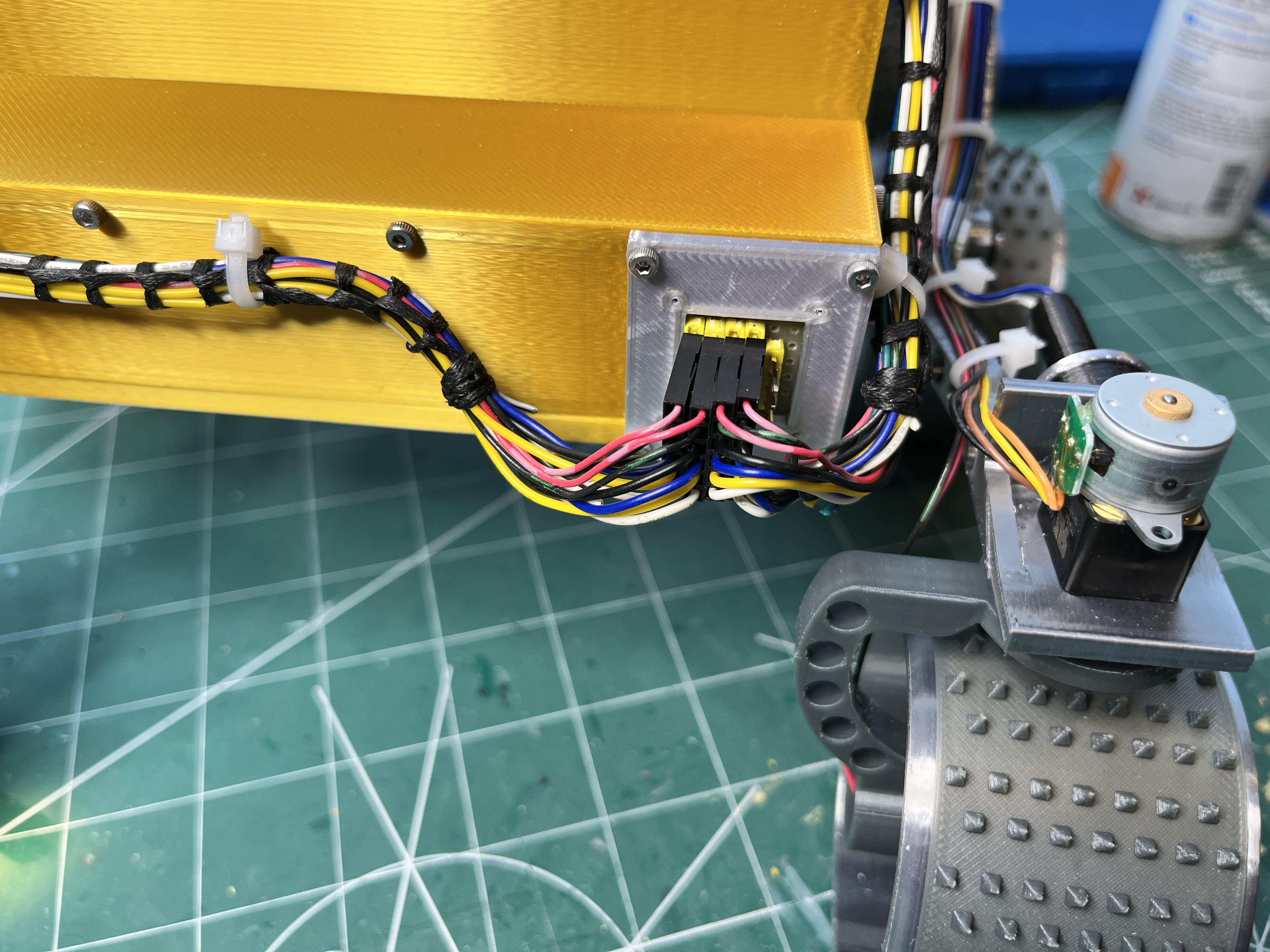
In the end the scale stepper motors work fine on the bench but are too weak to turn the wheels with the weight of the rover on the wheels. I chose to not upgrade the motors to a something was not to scale. As an alternative I included fake motors for anyone that wants to build a static version of the rover. The wheels will pivot and rotate but would not be driven by motors. If this is the way you choose to go, I would strongly suggest you include fake wires as that really adds to the realism of the model.
The 3D printable parts and install instructions are located on my Printables page at https://www.printables.com/@bglasford1



 Ameer
Ameer
 Andrey Kalmatskiy
Andrey Kalmatskiy
 Wriju
Wriju
 Brian Brocken
Brian Brocken