0%
0%
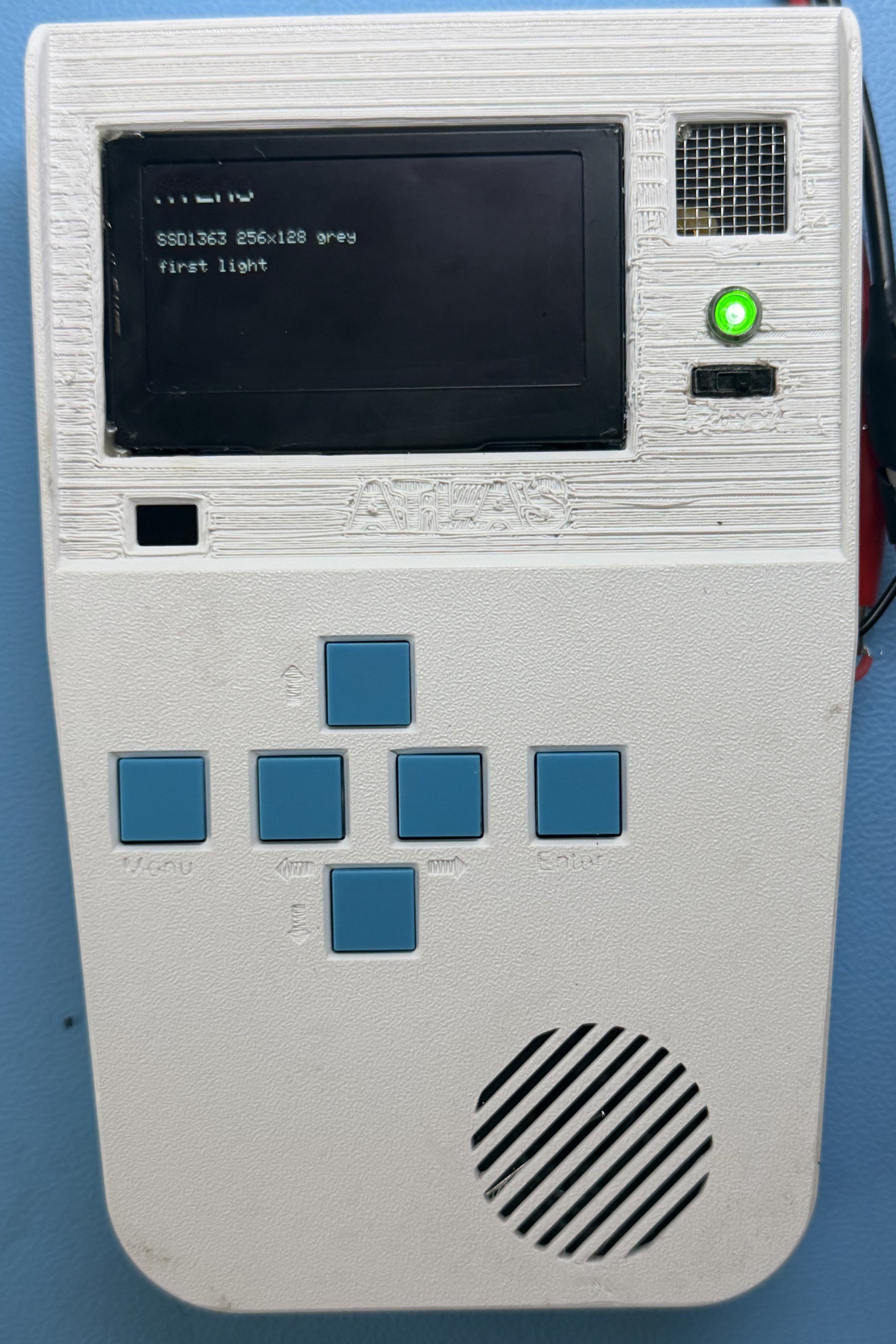
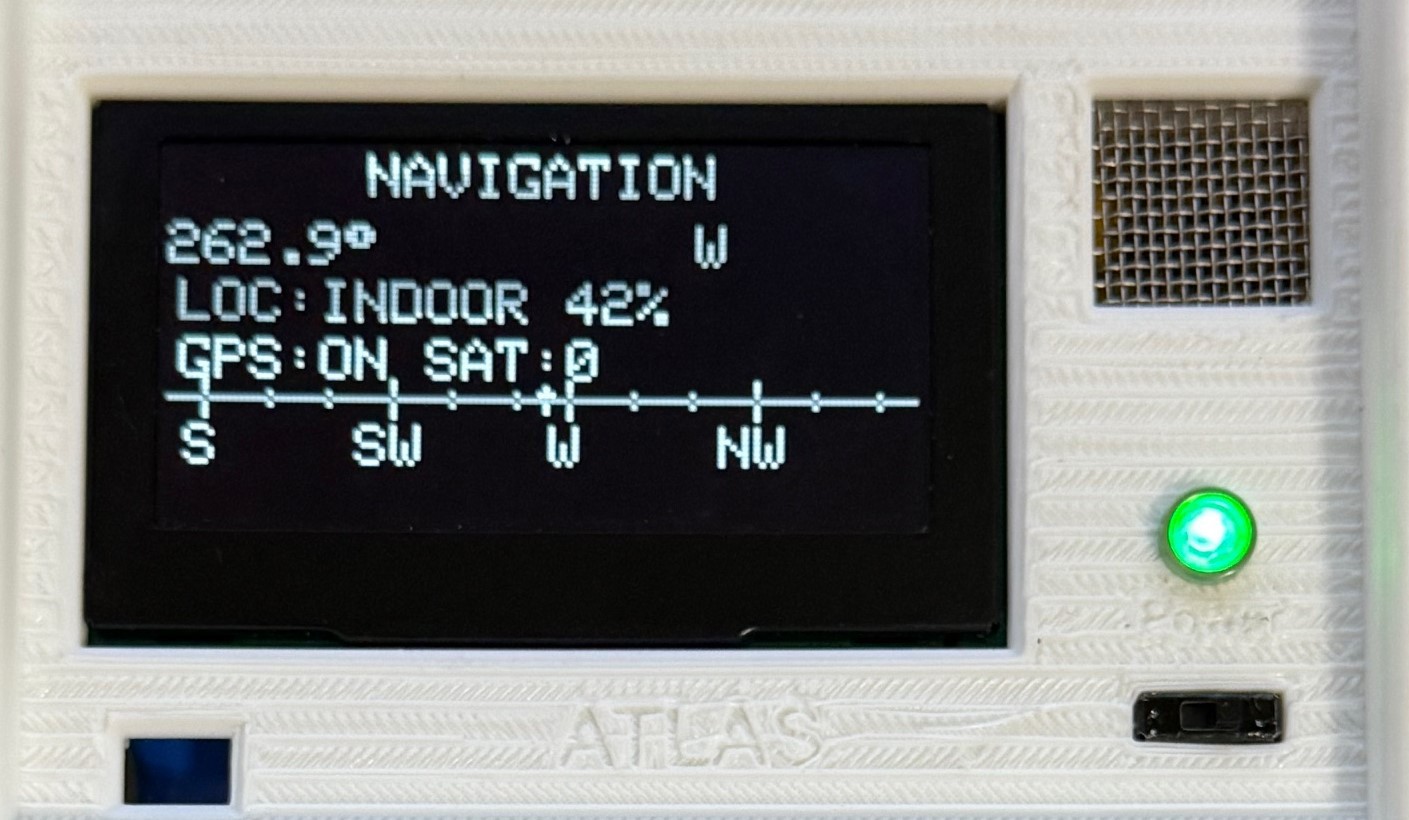
ATLAS
Built the tricorder I actually wanted in the field: one that warns, not just measures.
 Apollo Timbers
Apollo TimbersBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests





 electrobob
electrobob
 Kris Winer
Kris Winer
 Dimitar
Dimitar
 Samuel Wantman
Samuel Wantman
I sent a dm earlier this week. I had missed yours. ☹️