 saipraveen
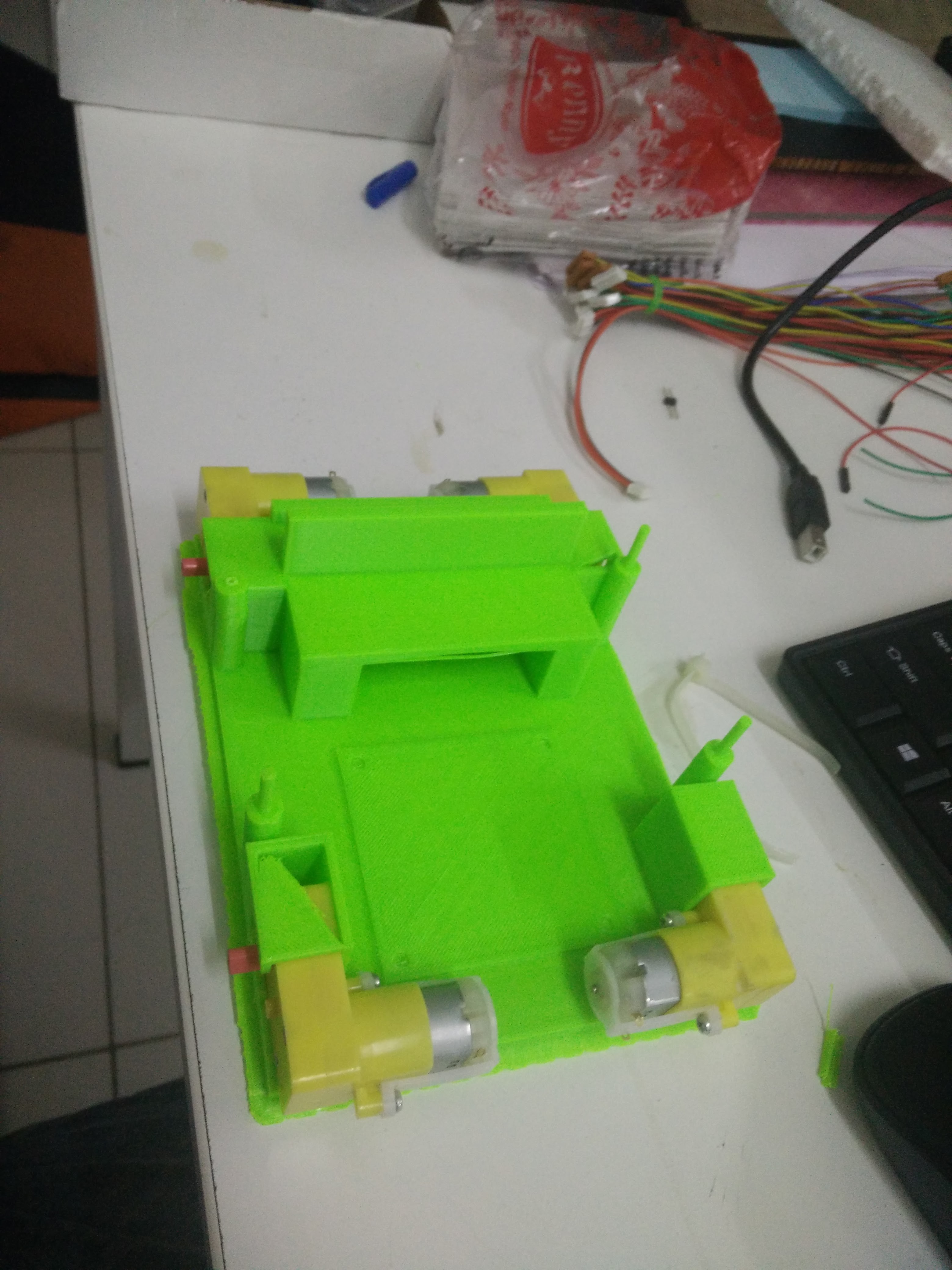
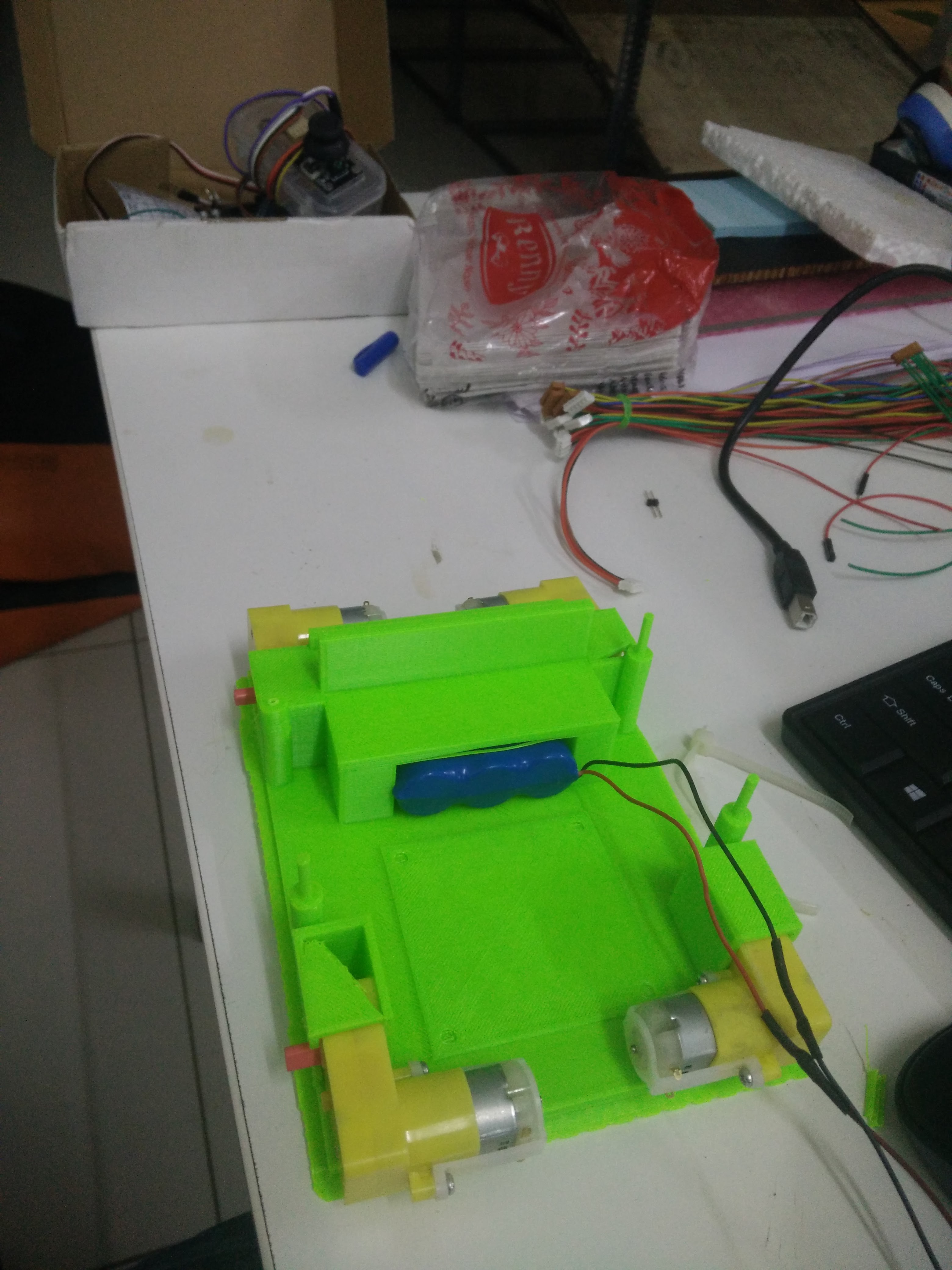
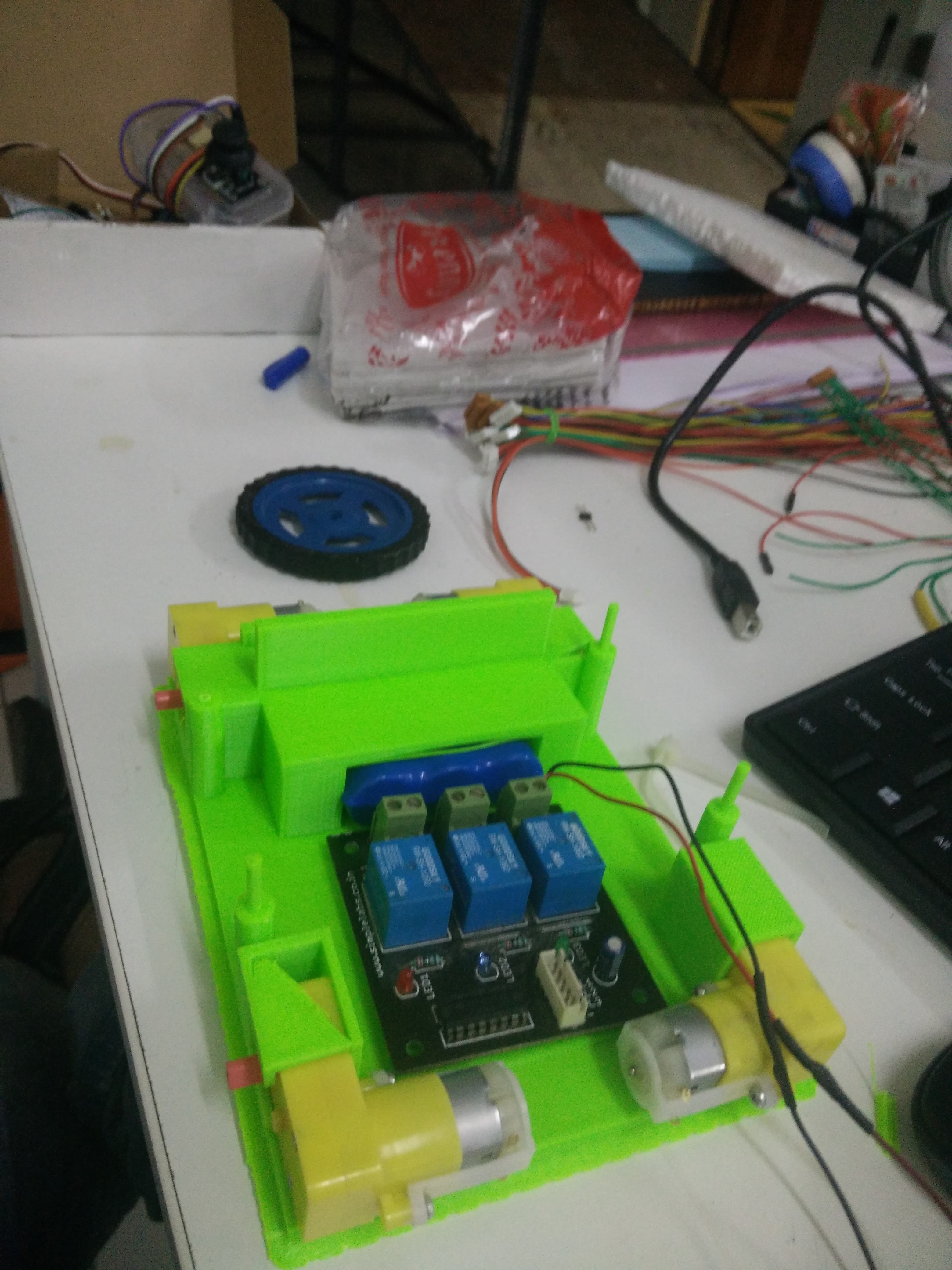
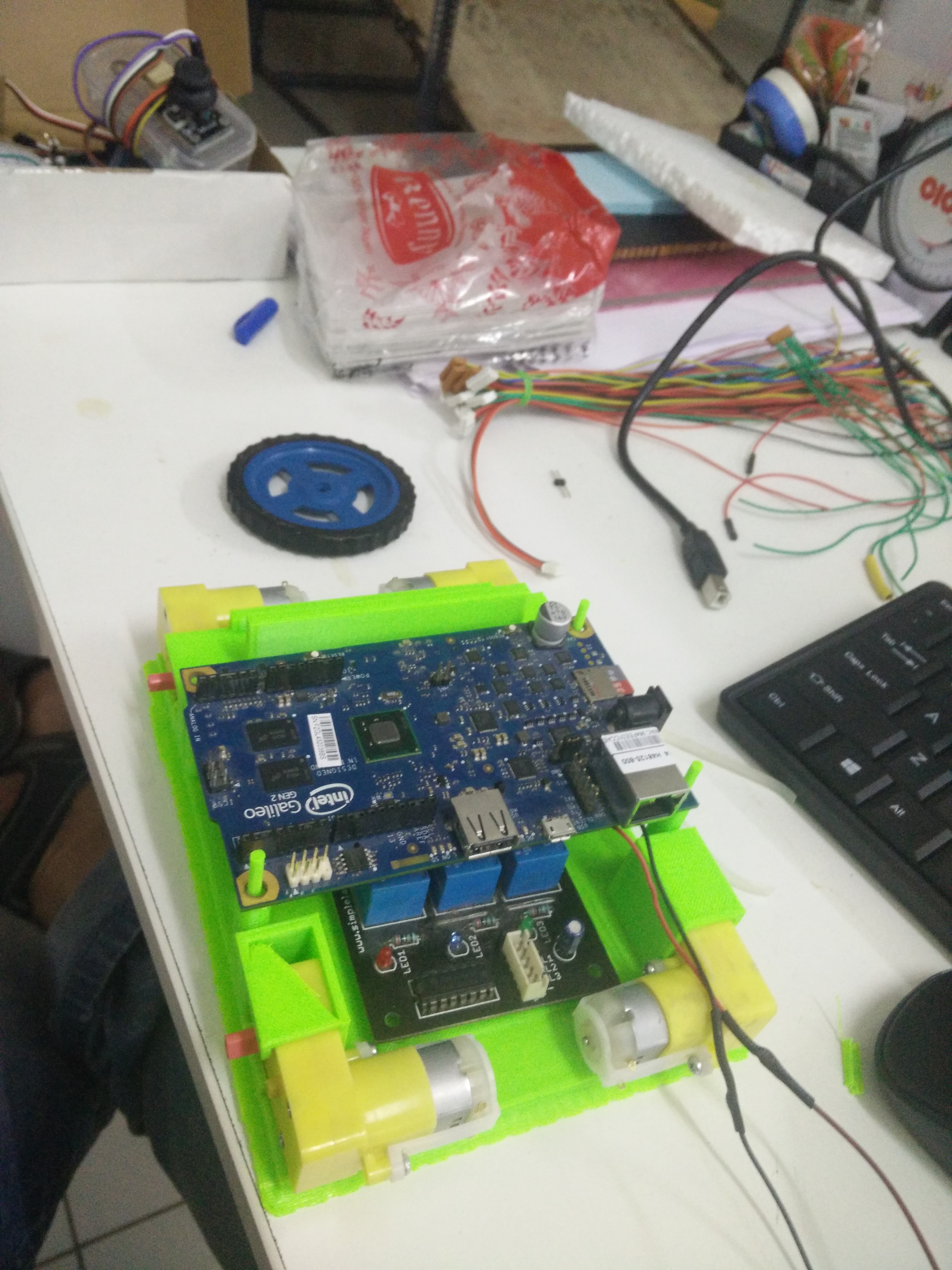
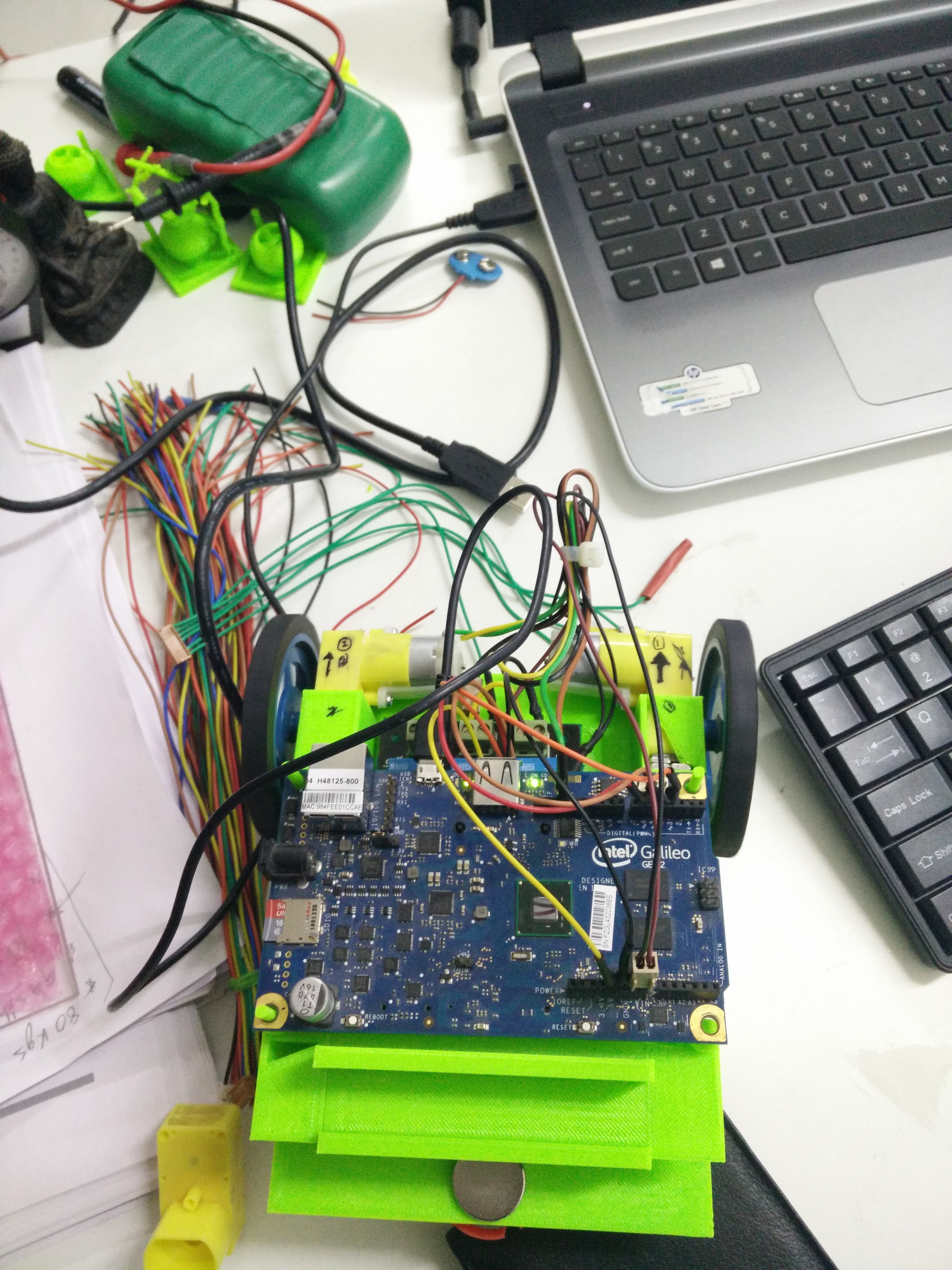
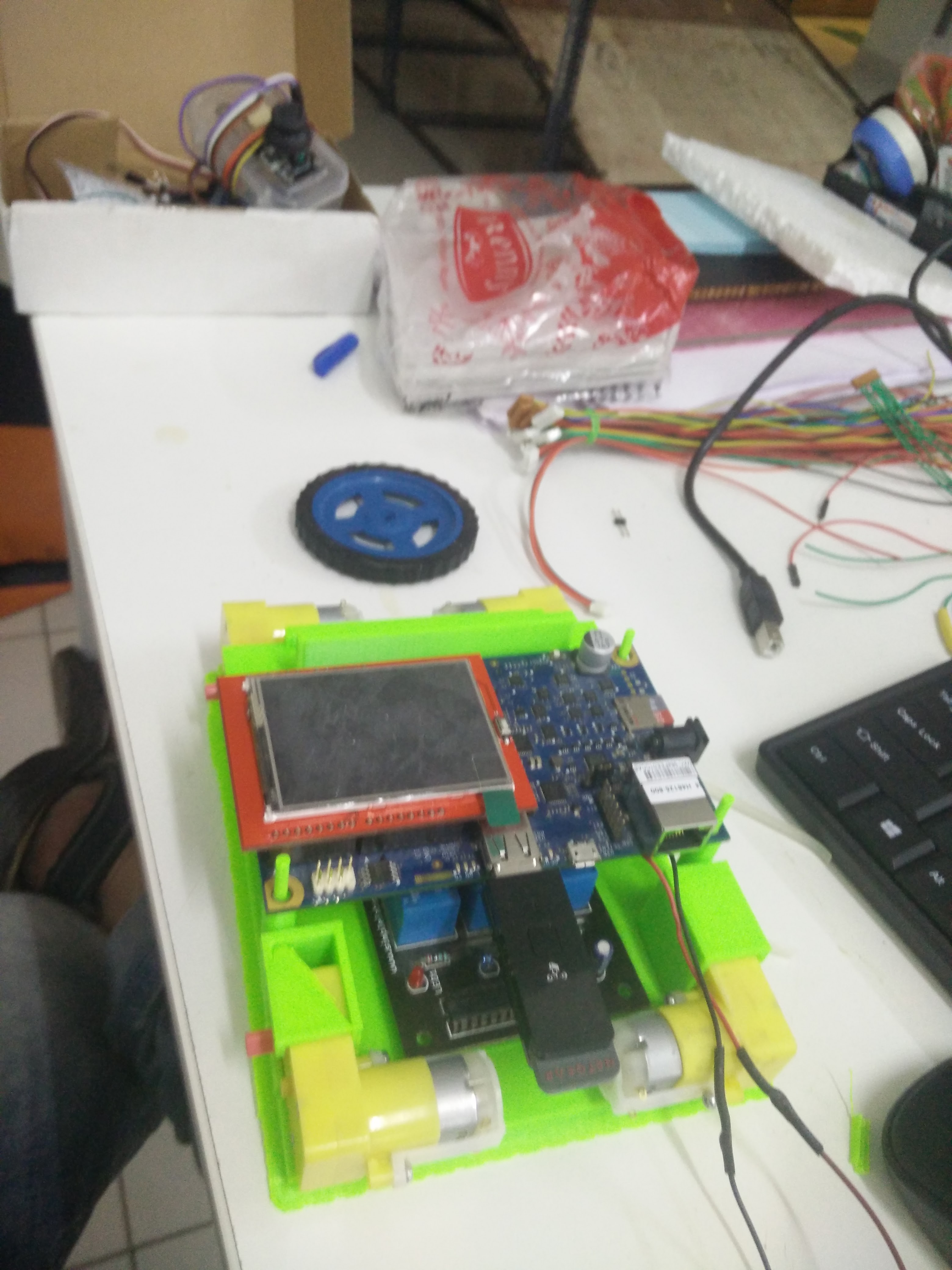
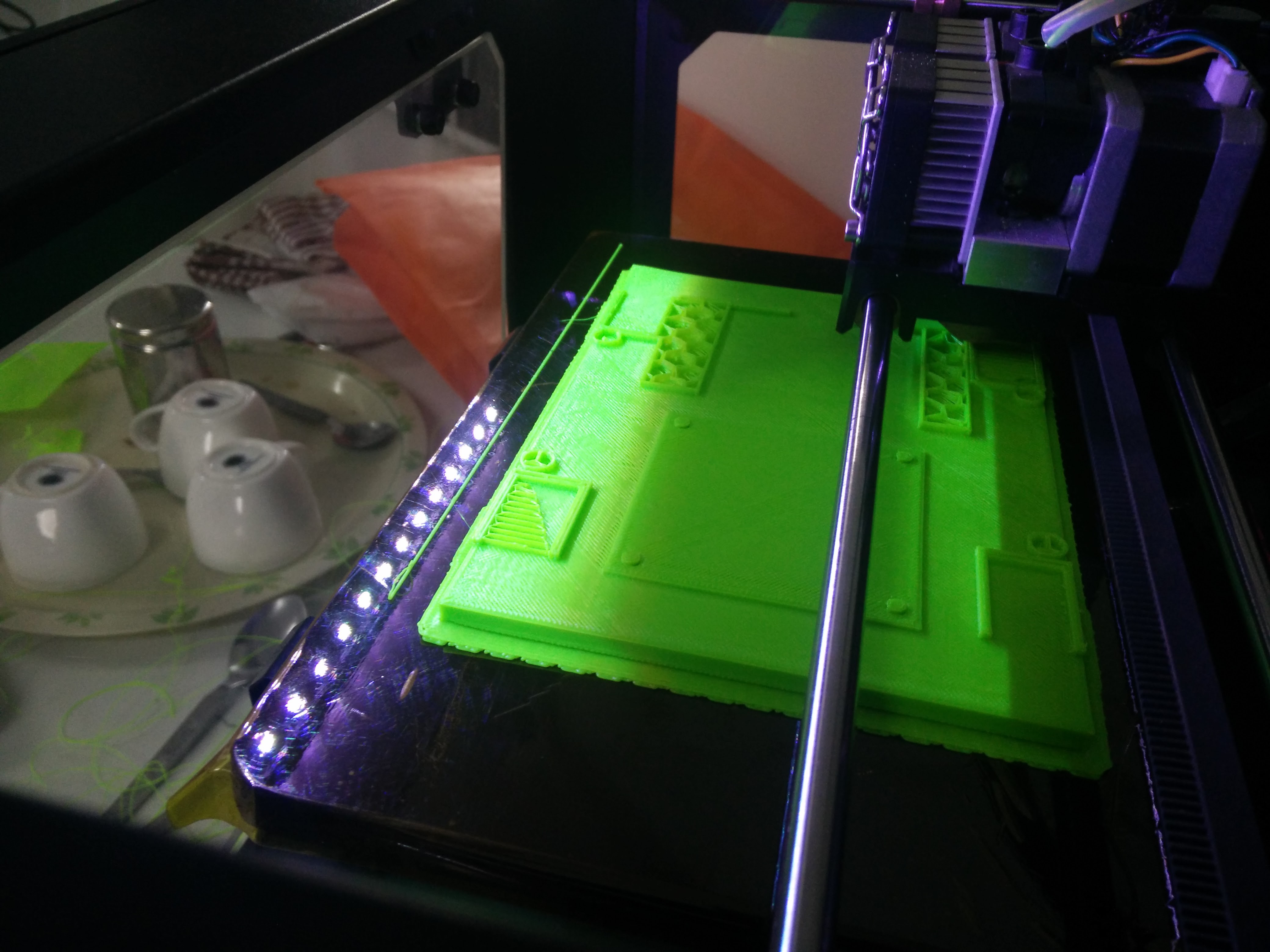
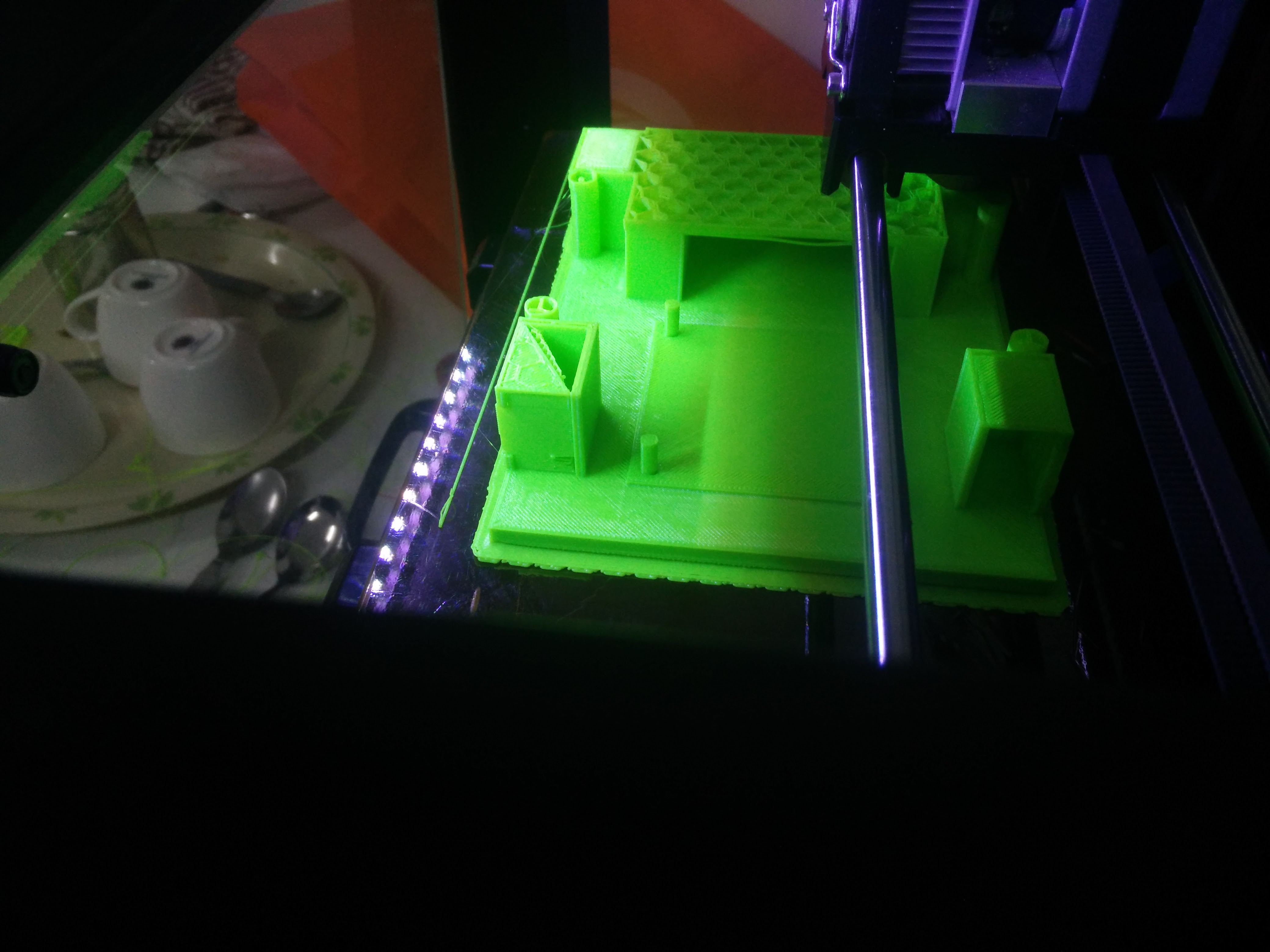
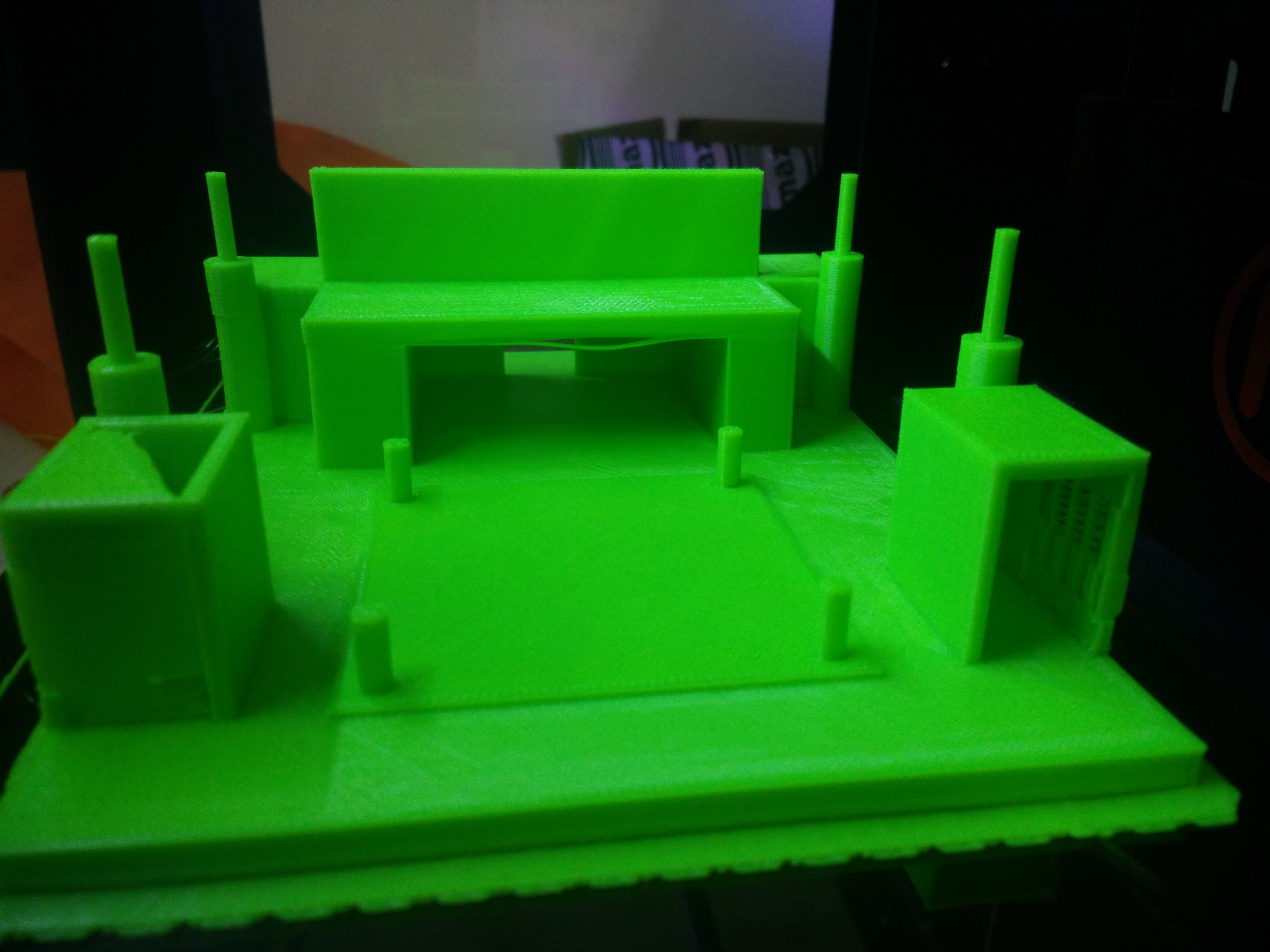
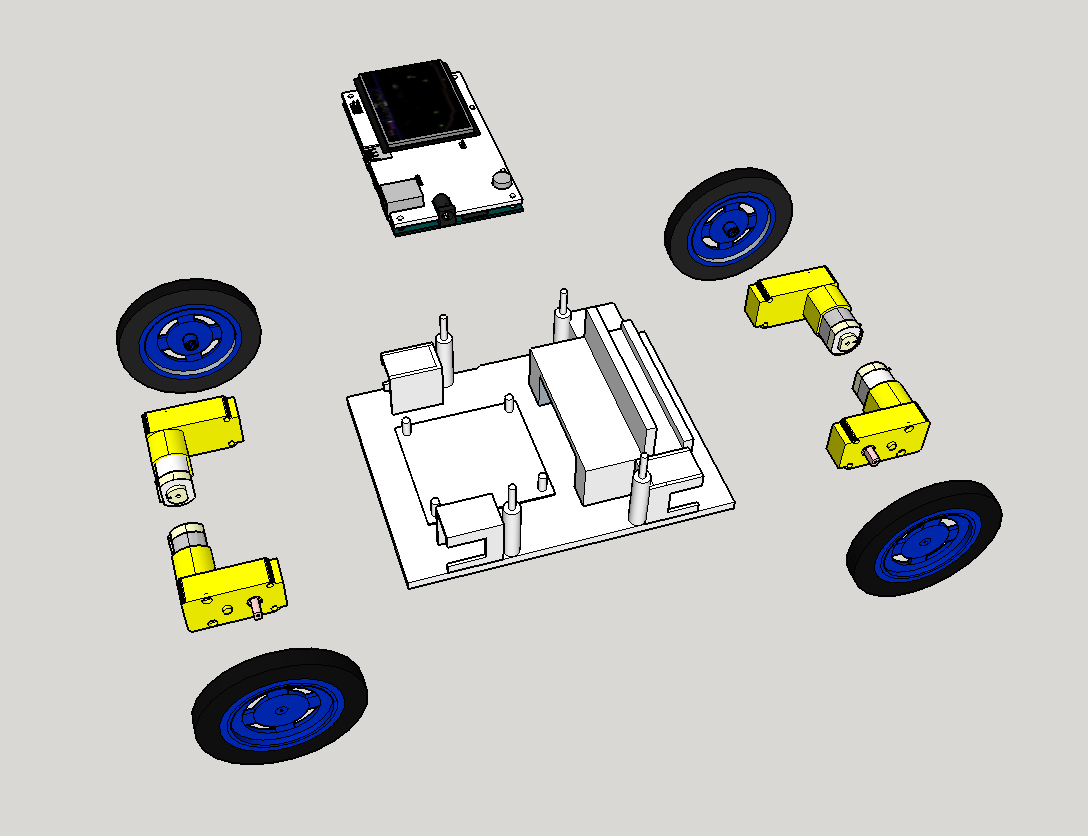
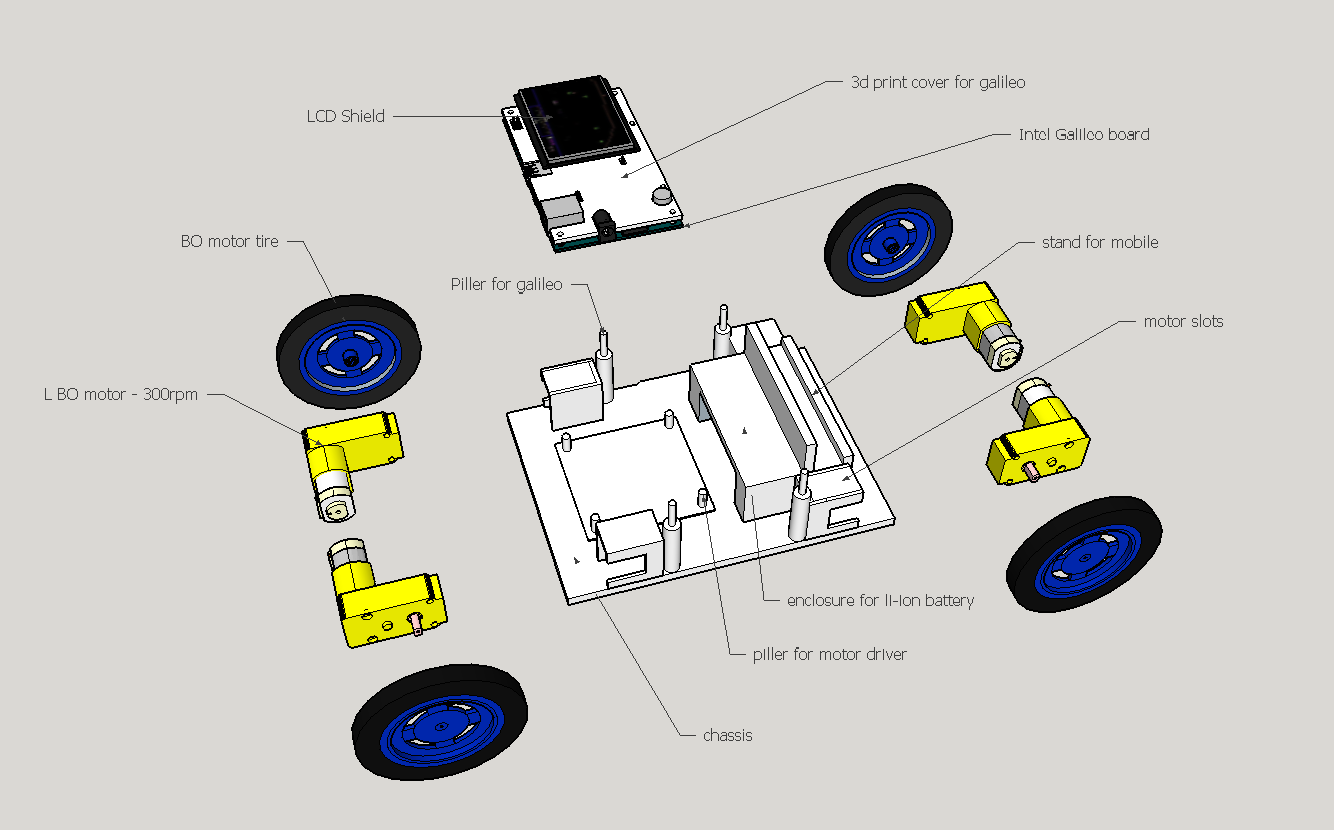
saipraveenThe purpose was to make an internet connected robot which is easy to assemble and disassemble. So the four wheeled robot uses an Intel Galileo board. This board interfaces with all other peripherals.
The basic building and working is shown in the video below,






 Ted Huntington
Ted Huntington
 Irene Sanz
Irene Sanz
 Joshua Elsdon
Joshua Elsdon