0%
0%
 davedarko
davedarkoBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 mechanicalsquid
mechanicalsquid
 MasterOfNull
MasterOfNull
 ActualDragon
ActualDragon
 Mister Malware
Mister Malware
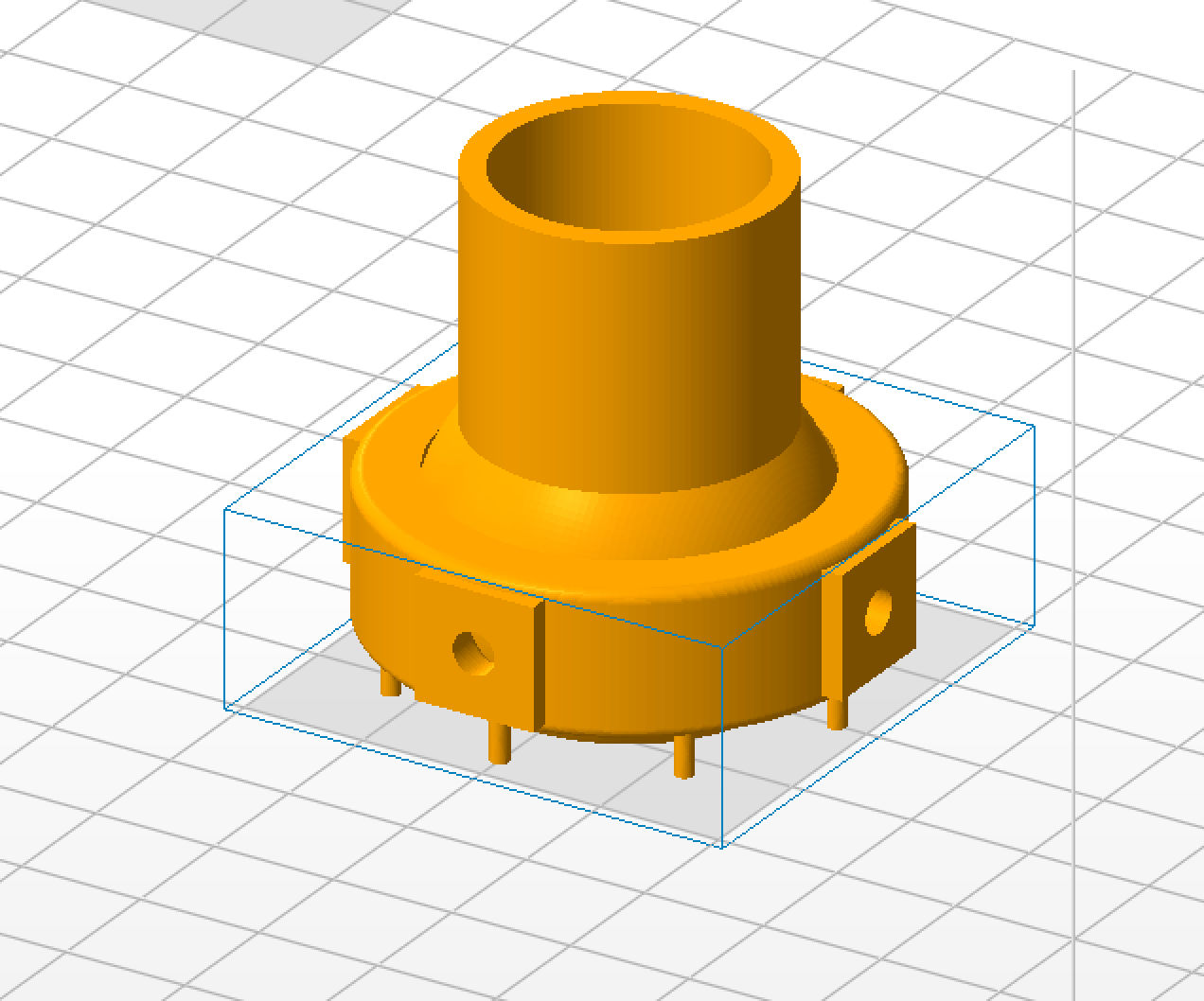
Quack quack... that is so much more fun than rectangular feet. I love it Dave!