 deʃhipu
deʃhipuThis project waited on the shelf for so long, that I decided to scrap it and rebuild into #Hexapod Henk MkII. Go there for the latest news on the project. This project is kept for archive.
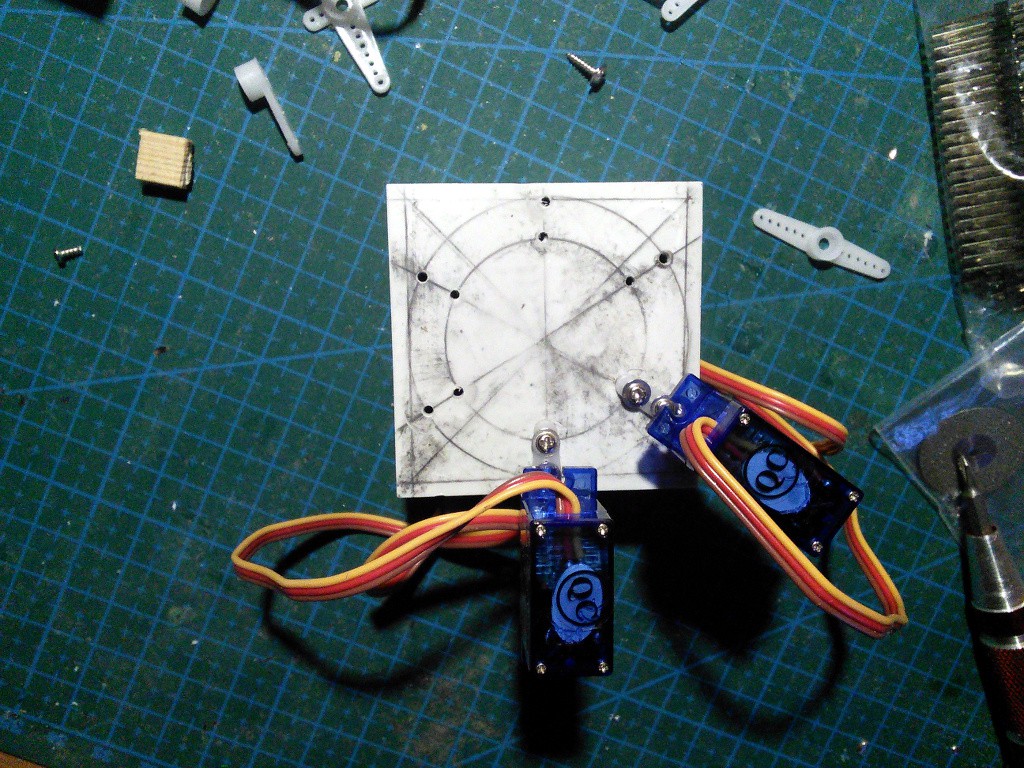
The legs are arranged in a circle, every 60°. The alternative was to have them in two rows, but they seemed to be too close together that way.
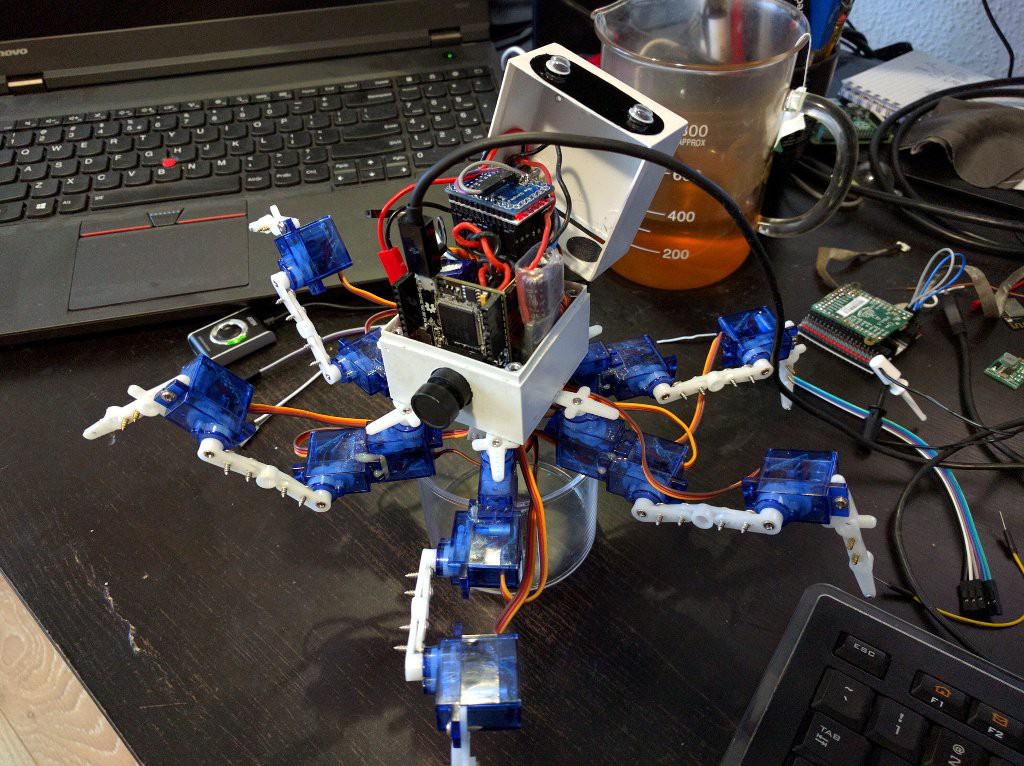
The power switch has a couple of 47kΩ resistors added to it, which form a voltage divider, connected to an analog pin. This way I can tell the battery voltage, and monitor it. Since the analog pin also doubles as DAC pin, I had to remove the speaker. It's a bit of a shame, but it was too quiet anyways. I might add a proper audio board in the future, if really needed (or monitor the voltage differently).



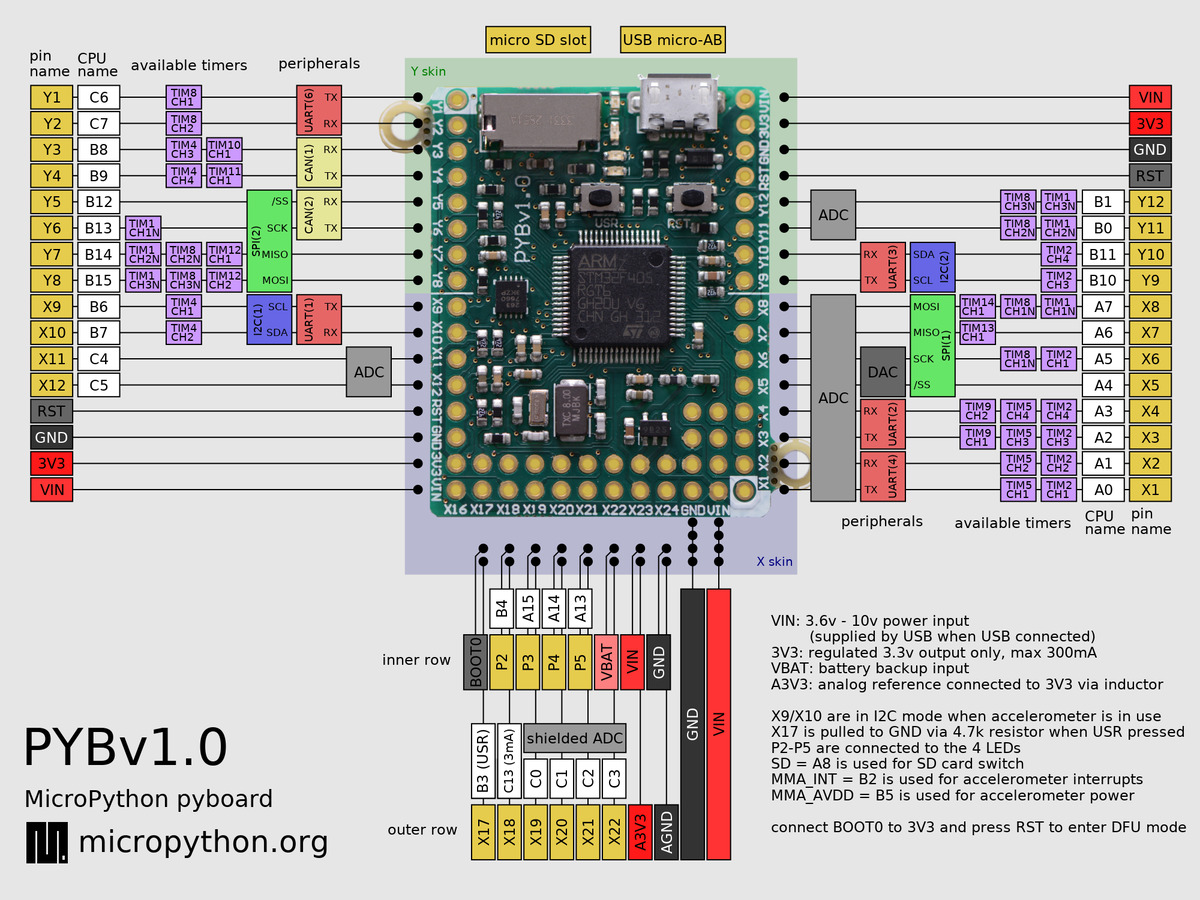 , you can see that there are several UARTs available (the red squares). Each has RX and TX pin. If you look at the servo controller's pins
, you can see that there are several UARTs available (the red squares). Each has RX and TX pin. If you look at the servo controller's pins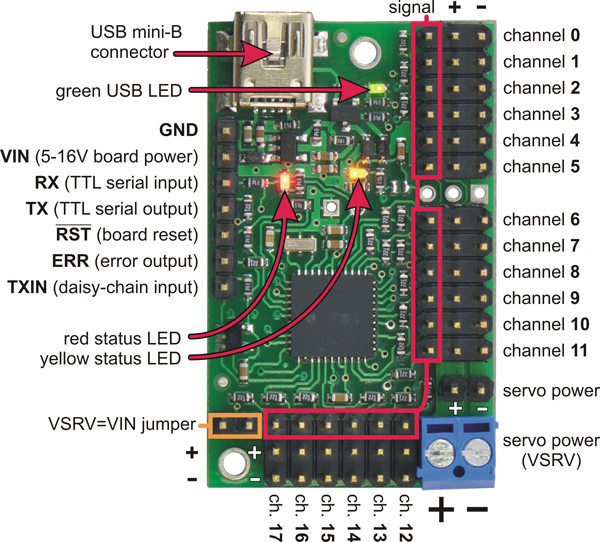
Thanks alot ! This is very helpfull, I ll give it a try.