 deʃhipu
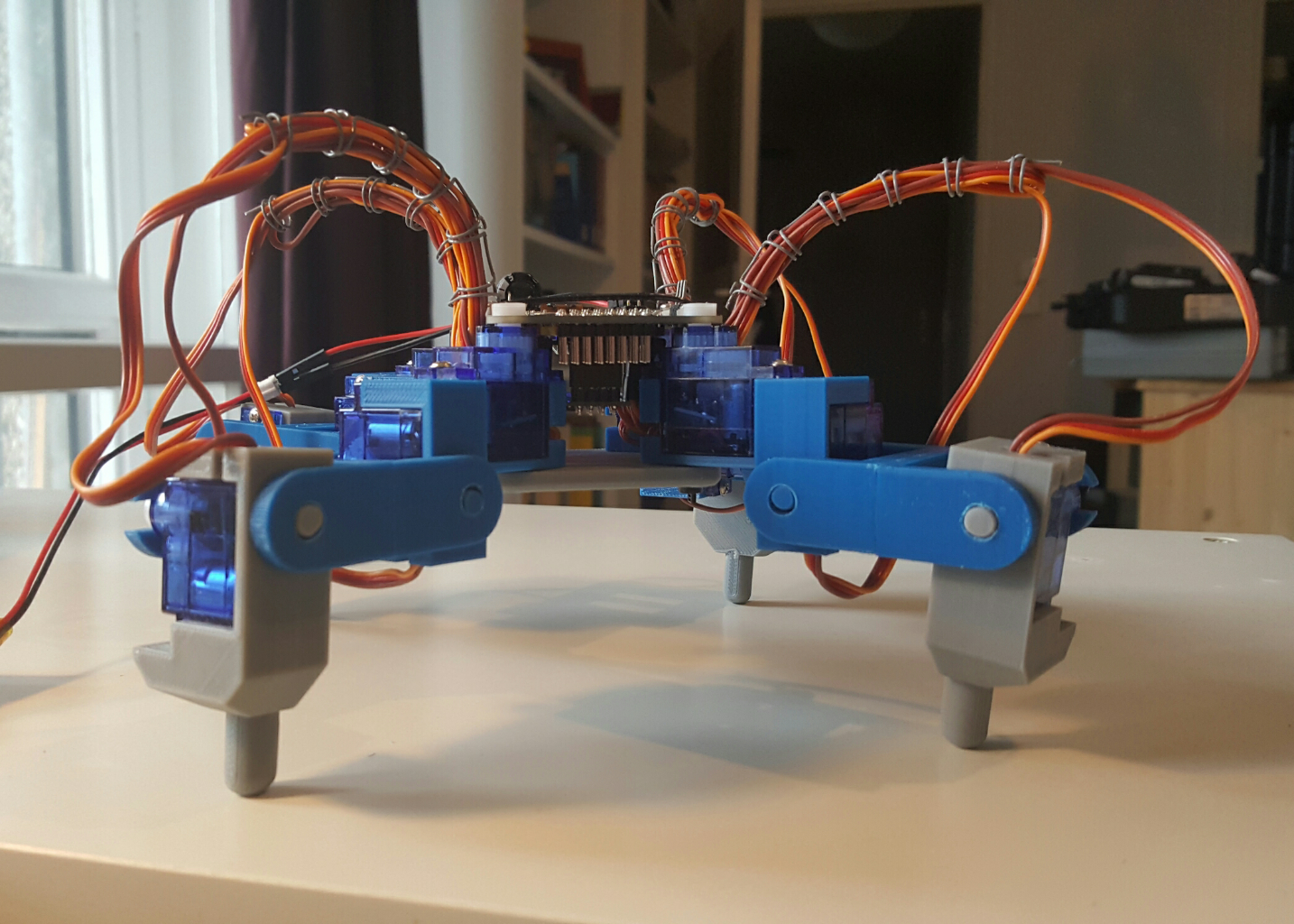
deʃhipu#Tote is a spider-like quadruped robot. While its small size and plastic parts make it look like a toy, it was in fact designed as a platform for experimenting with walking robots. Unlike many toys that have their gaits hard-wired, Tote has individual control over each of its legs, with three degrees of freedom, using inverse kinematics calculations. This gives it great flexibility, and makes it possible to implement gaits that let it walk on uneven terrain, and even climb obstacles! Of course it can also dance.
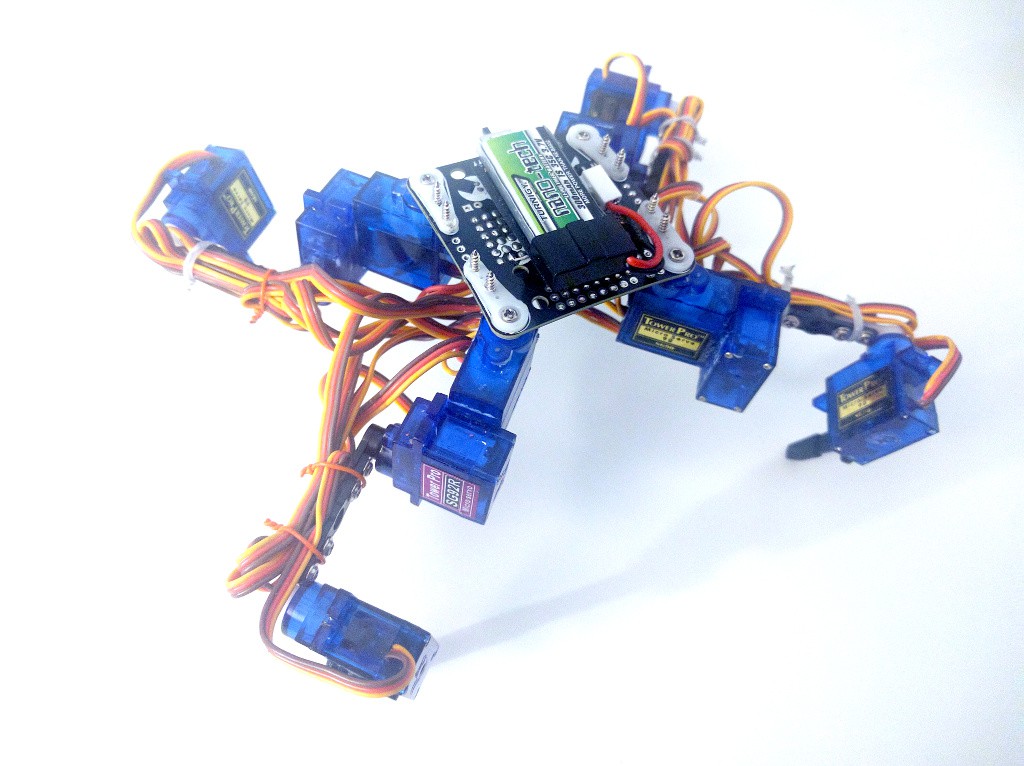
There are also a lot of options for extending it. While initially Tote doesn't have any sensors, it's possible to give it touch, sight, force sensing, hearing and sense of balance, by simply adding appropriate sensors, connecting them to the free pins, and -- of course -- programming new behaviors based on their reports.
Even without the extra sensors, Tote can be quite useful. It's small and portable, so it can be conveniently transported. It's sturdy, flexible and relatively weak -- which makes it quite safe to handle. And it's complex enough to explore the problems of robot walking and test new algorithms.









 jimrd
jimrd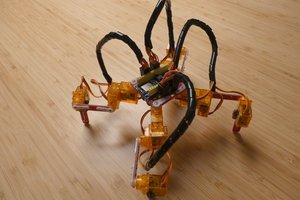

 Joshua Elsdon
Joshua Elsdon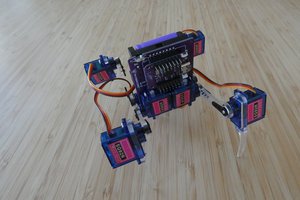
Can someone tell me what is the name (if there is any) of the connector that is on the battery? Thanks - EDIT - found it... JST if someone else is wondering also... It is written on the connector :)