igorfonseca83
igorfonseca83-
Presentation of the project
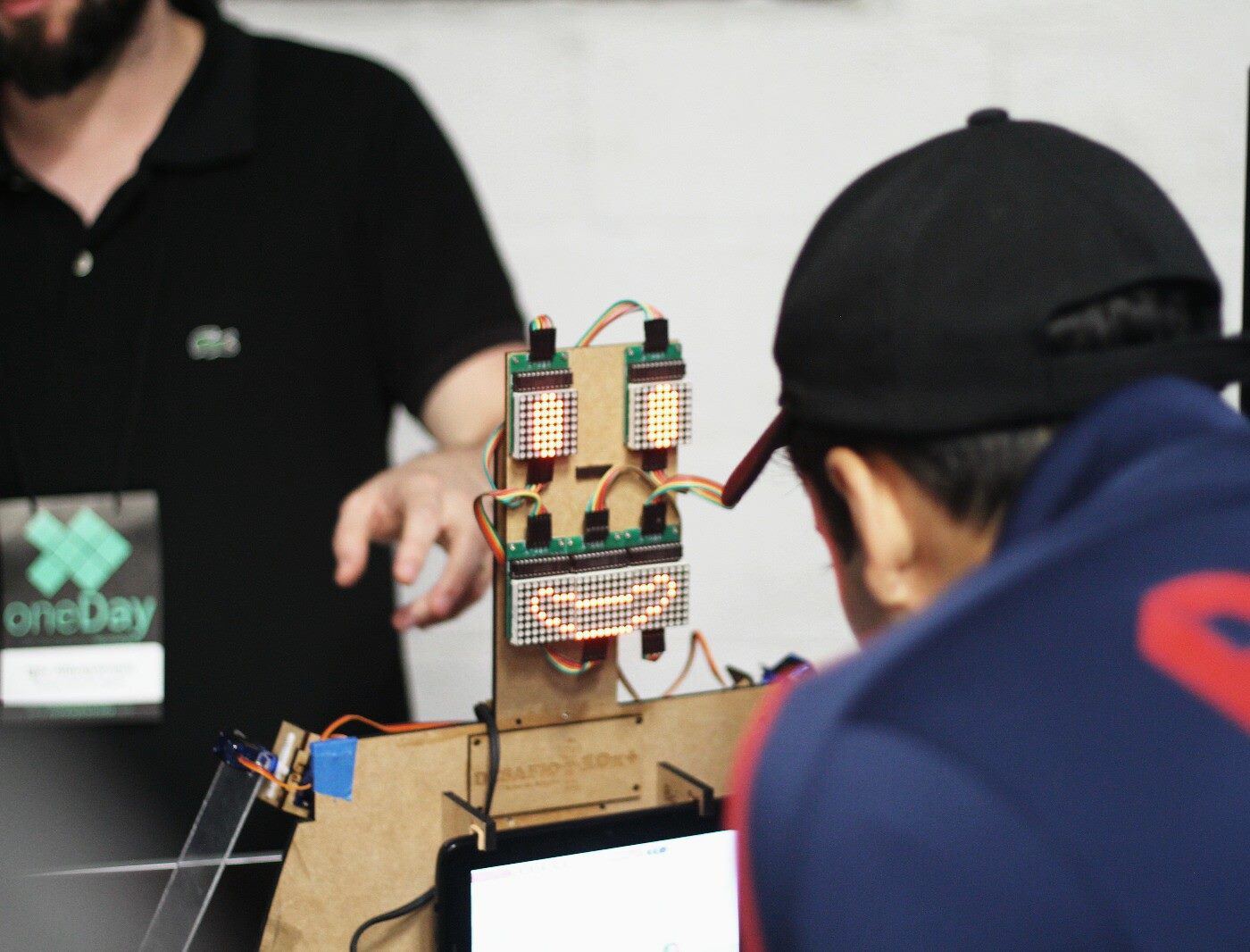
10/01/2016 at 23:41 • 0 commentsurrent version of the robot was presented to the public on oneDay Baixada Santista 2016, a regional congress on IoT and game development.
An overview of the project was presented , including a chat between the public and robot itself. After that the public interacted with the robot, controlling it through some games.
![]()
![]()
![]()
![]()
A versão atual do robô foi apresentada ao público no oneDay Baixada Santista 2016, um congresso regional sobre internet das coisas e desenvolvimento de jogos.
Um visão geral do projeto foi apresentada em uma palestra, com um bate papo entre o público e próprio robô.
Após isso o público pôde interagir com o robô, controlando-o através de jogos.
-
Game development
09/13/2016 at 15:51 • 0 commentsThe tablet, located in the robot's chest, can be used for presentation of games that can interact with its body. A demonstration game, implemented in Java using Eclipse with the Android SDK is under development.
O tablet, localizado no peito do robô, pode ser utilizado para apresentação de jogos que possam interagir com o seu corpo.
Um jogo demonstrativo, implementado em Java utilizando o Eclipse com o SDK do Android, está em desenvolvimento.
-
Local control interface
09/06/2016 at 22:27 • 0 commentsAn interface in html, java script and jquery was developed for robot's arms and face control, which was saved on an Android tablet and 7". Through the interface the user can choose from nine options of faces and pre-programmed movements.
The tablet and the Arduino (via ESP8266 ) were connected to the same wifi network, and commands were sent over the network without physical connection between components.
Foi desenvolvida uma interface em html, java script e jquery para controle dos braços e rosto do robô, a qual foi salva em um tablet Android e 7". Através da interface o usuário pode escolher entre 9 opções de face e de movimentos pré-programados.
O tablet e o Arduino (através do ESP8266) foram conectados em uma mesma rede wi-fi, e os comandos são enviados pela rede, sem conexão física entre os componentes.
-
Mechanics - MDF skeleton
08/28/2016 at 22:15 • 0 commentsAfter studing the dimensions of the prototype in the acrylic model, an improved version of robot's skeleton was designed to be produced in MDF using a laser cutter.
The structure was design in a 3D CAD software (123D Design), and is composed of 14 diferent shapes in a total of 23 pieces.
Each part was exported from .123dx to .stflformat. OpenSCAD software was used to convert .stl files to .dxf format, which were edited in DraftSight before uploading it to the laser cutter.
Each part was identified, and some labels were added to indicate how a given piece is connected to its neighbours.
The skeleton was assembled and a 7 inch tablet mounted to its chest.
Depois de estudar as dimensões do protótipo no modelo acrílica , uma versão melhorada do esqueleto do robô foi projetada para ser produzida em MDF utilizando um cortador a laser .
A estrutura foi desenvolvida em um software de CAD 3D ( 123D Design), e é composta de 14 formas diferentes em um total de 23 peças.
Cada parte foi exportada do formato .123dx para .stl. O software OpenSCAD foi utilizado para converter os arquivos do formato .stl para .dxf , os quais foram editados no DraftSight antes de enviá -lo para o cortadora a laser . Cada parte foi identificada, e algumas gravações foram adicionadas para indicar como uma determinada peça é ligada a suas vizinhas.
O esqueleto foi montado e um tablet de 7 polegadas montado em seu peito.
-
3D Printing of the arms pt.2
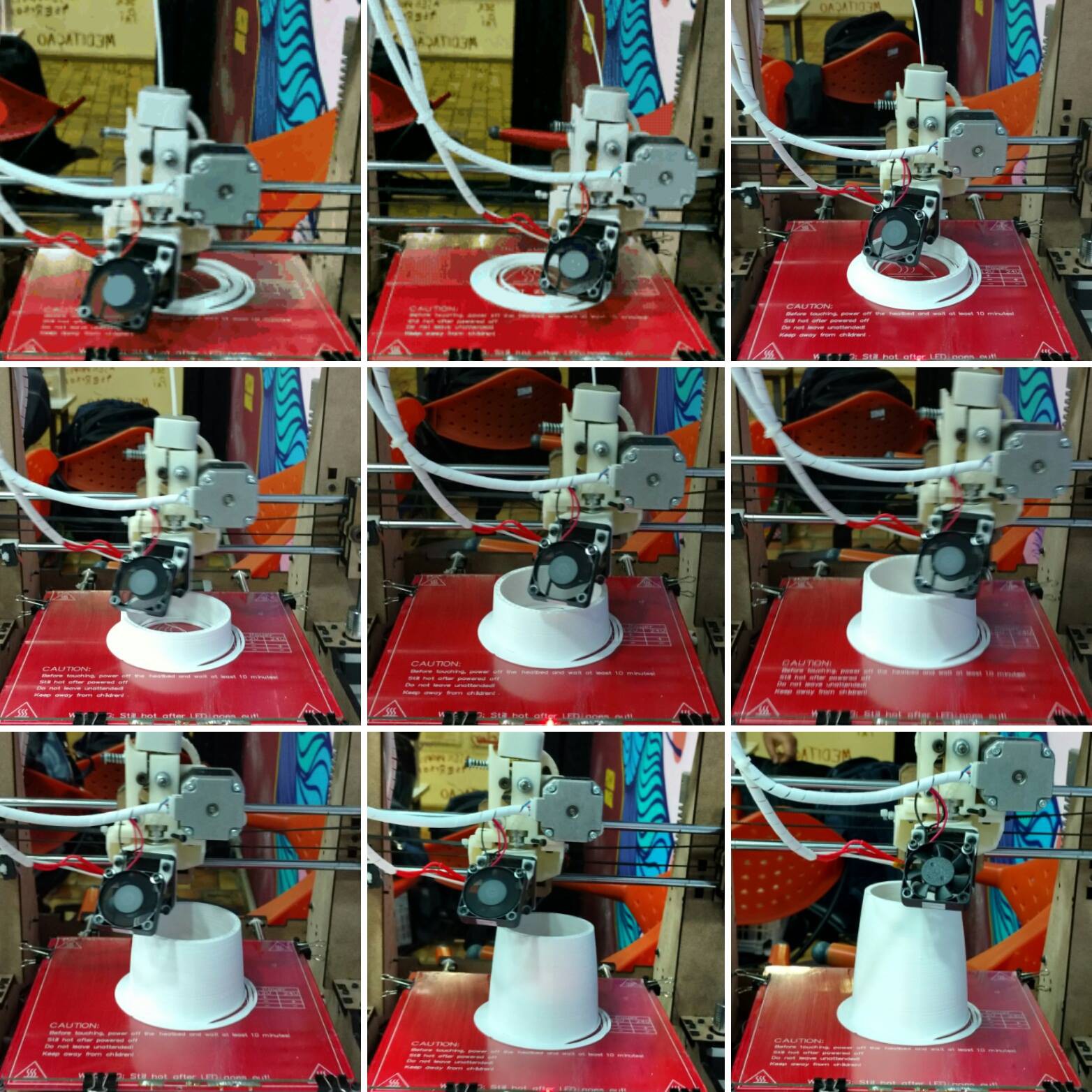
08/23/2016 at 13:49 • 0 commentsThe second part of the left robot arm was printed in 3D using PLA with low density and spacing of 0.3mm between layers in a total printing time of about three hours.
![]()
A segunda peça do braço esquerdo do robô foi impressa em 3D utilizando PLA com baixa densidade e espaçamento de 0,3mm entre camadas, em um tempo total de impressão de cerca 3 horas.
-
Mechanics - Acrylic skeleton pt.2
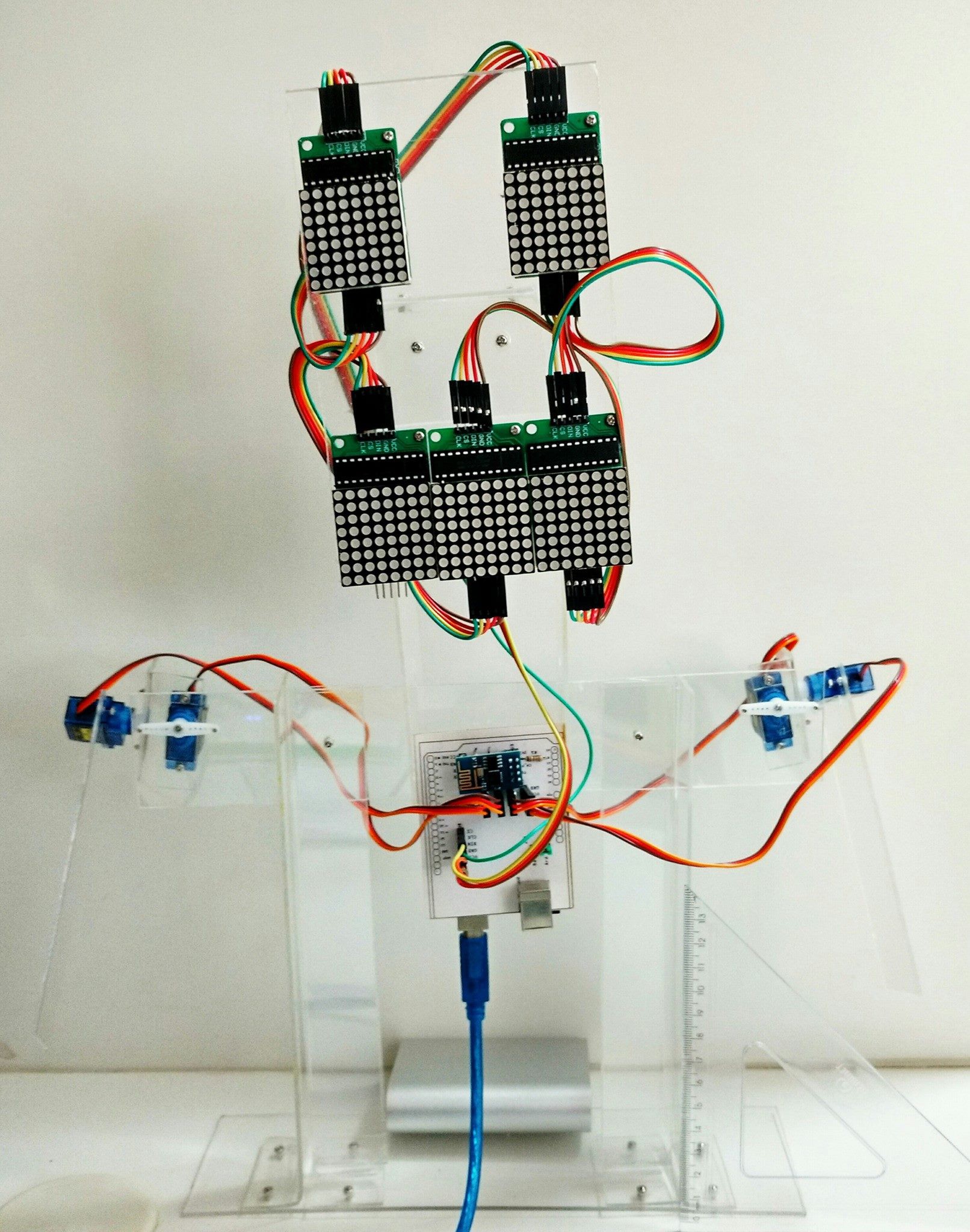
08/23/2016 at 13:42 • 0 commentsFive LED arrays were attached to the robot 's face in an acrylic sheet, and mounted on the body. Four servomotors were installed on his shoulders for the movements of the arms. Circuits were mounted on the robot 's chest for easy access. The skeleton was useful for testing the movements and to give an idea of the overall dimensions of the robot. However, the material used (2mm acrylic) is considerably light and malleable, resulting in unwanted vibration and instability of the structure.
The structure is being adapted to use harder laser cutted materials.
![]()
Cinco matrizes de LED foram fixadas ao rosto de robô em uma folha de acrílico, e montado no corpo . Quatro servomotores foram instalados nos ombros para os movimentos dos braços . Circuitos foram montados sobre o peito do robô para fácil acesso .
O esqueleto foi útil para teste dos movimentos e para dar uma ideia das dimensões gerais do robô. Entretanto, o material utilizado (acrílico de 2mm) é consideravelmente leve e maleável, resultando em vibrações não desejadas e instabilidade da estrutura.
A estrutura está sendo adaptada para utilização de materiais mais rígidos cortados a laser.
-
Project and 3D printing of the arms
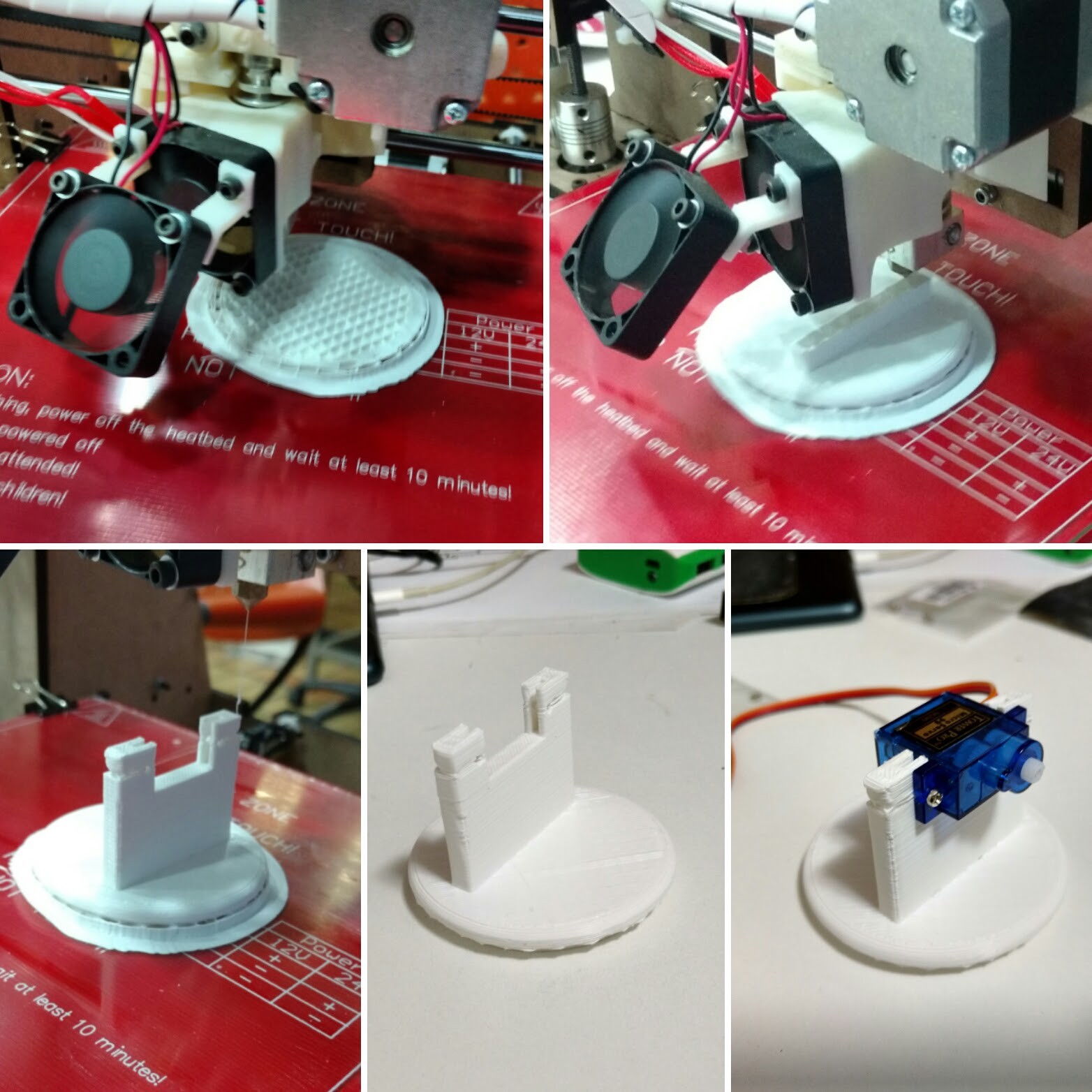
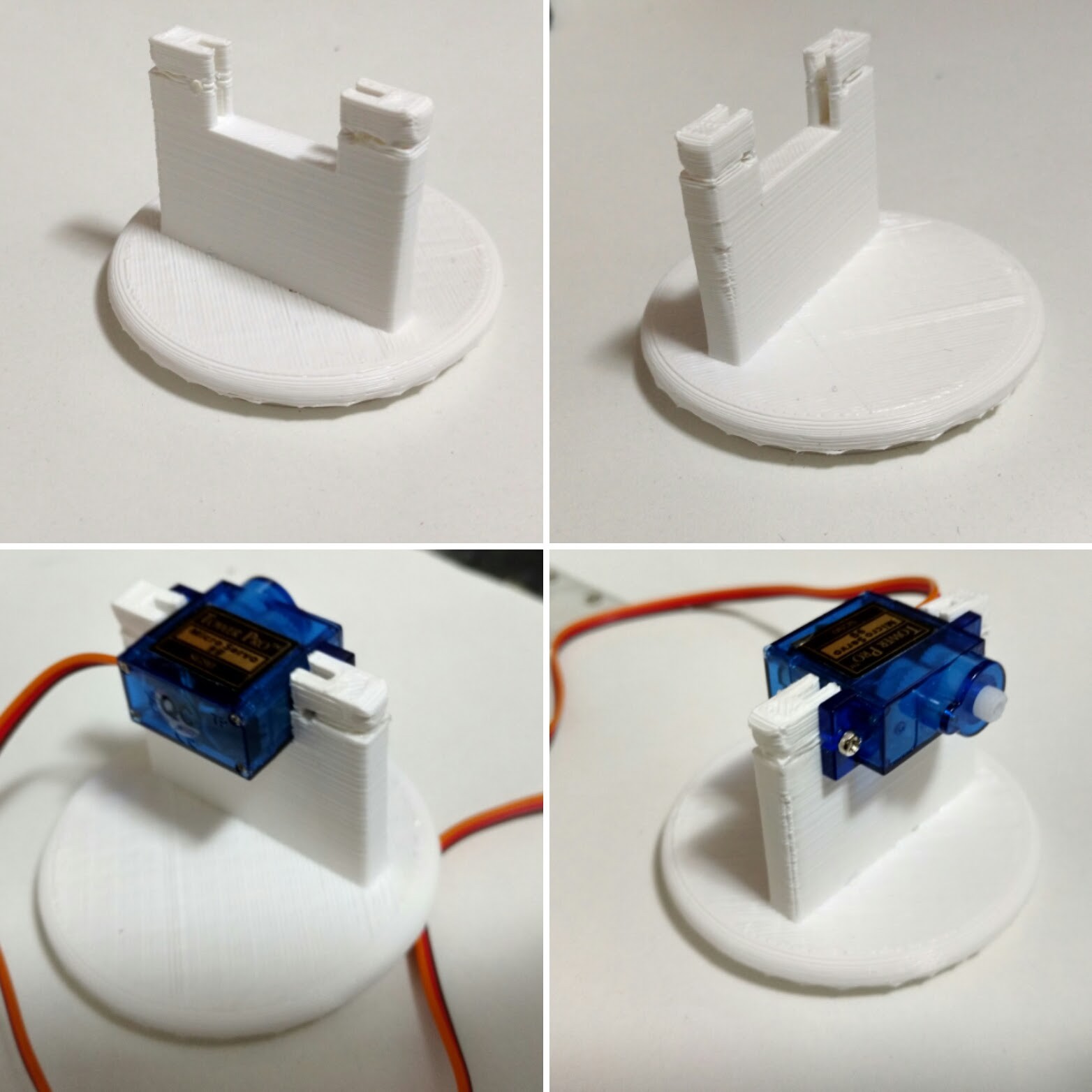
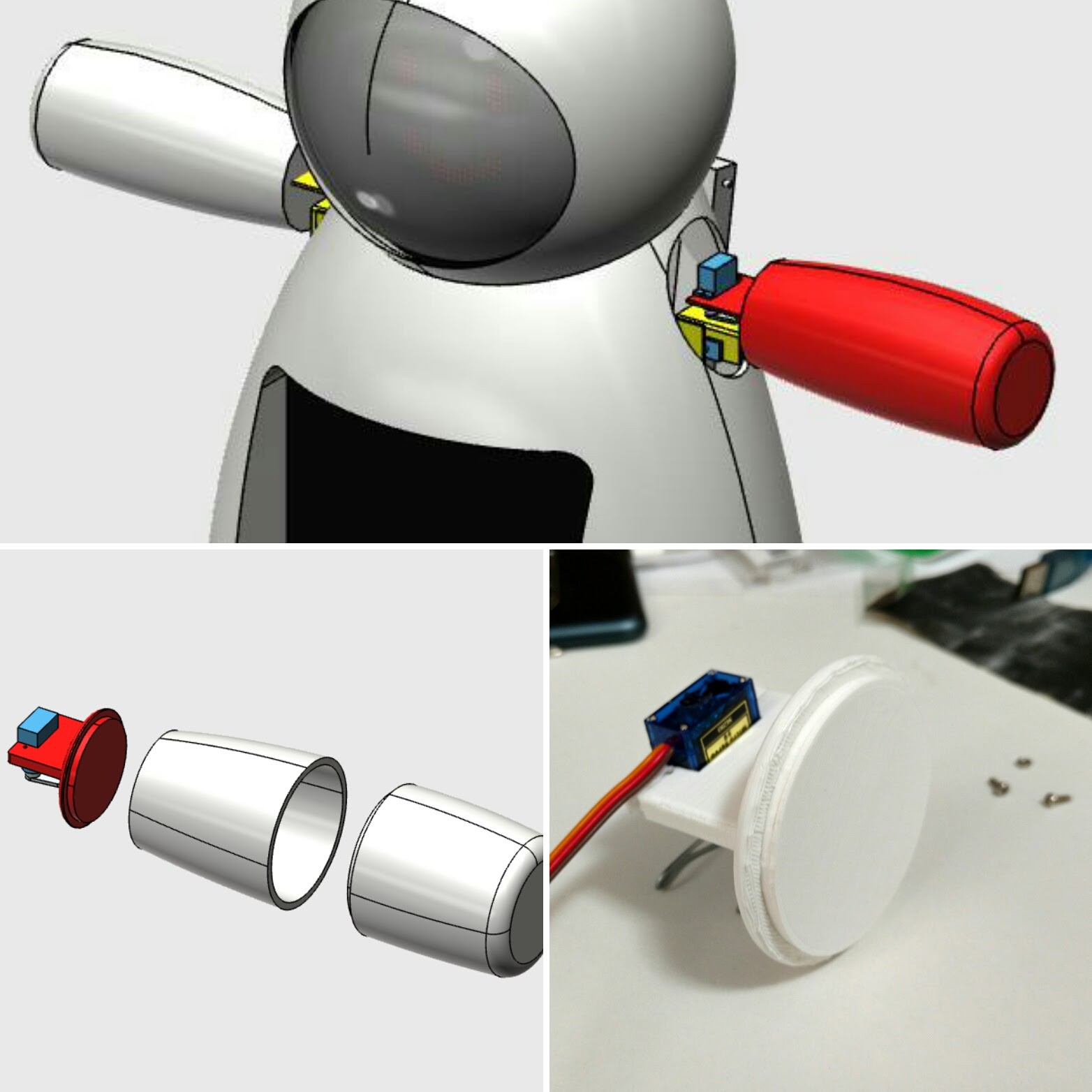
08/14/2016 at 18:57 • 0 commentsRobot's structure was initially designed using 123D Design software. The left arm (highlighted in red in the image bellow) is under construction, and was divided in three parts to meet 3D printer maximum dimensions.
![]() The fist part is the joint where servomotor is attached. It was 3D printed in PLA, and the SG90 servo was mounted using bolts and nuts.
The fist part is the joint where servomotor is attached. It was 3D printed in PLA, and the SG90 servo was mounted using bolts and nuts.
![]()
![]()
A estrutura do robô foi inicialmente projetada usando o software 123D Design. O braço esquerto (destacado em vermelho na imagem acima) está em construção e foi dividida em três partes para atender as máximas dimensões da impressora 3D.
A primeira parte é onde o servomotor é conectado. Ela foi impressa em 3D em PLA e o servomotor SG90 foi montado utilizando-se parafusos e porcas.
-
3D printing
08/14/2016 at 18:43 • 0 comments3D printing of left arm's first joint in PLA.
Impressão 3D da primeira junta do braço esquerdo em PLA.
-
Mechanics - Assembling acrylic skeleton
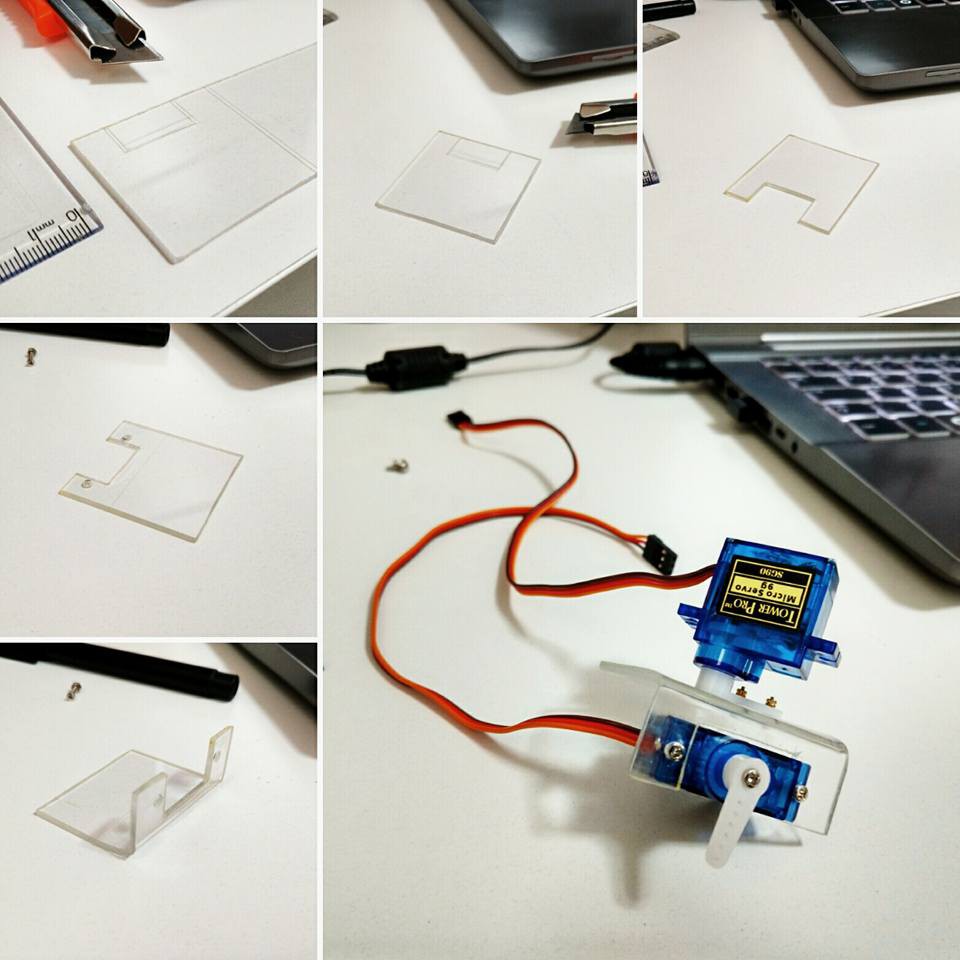
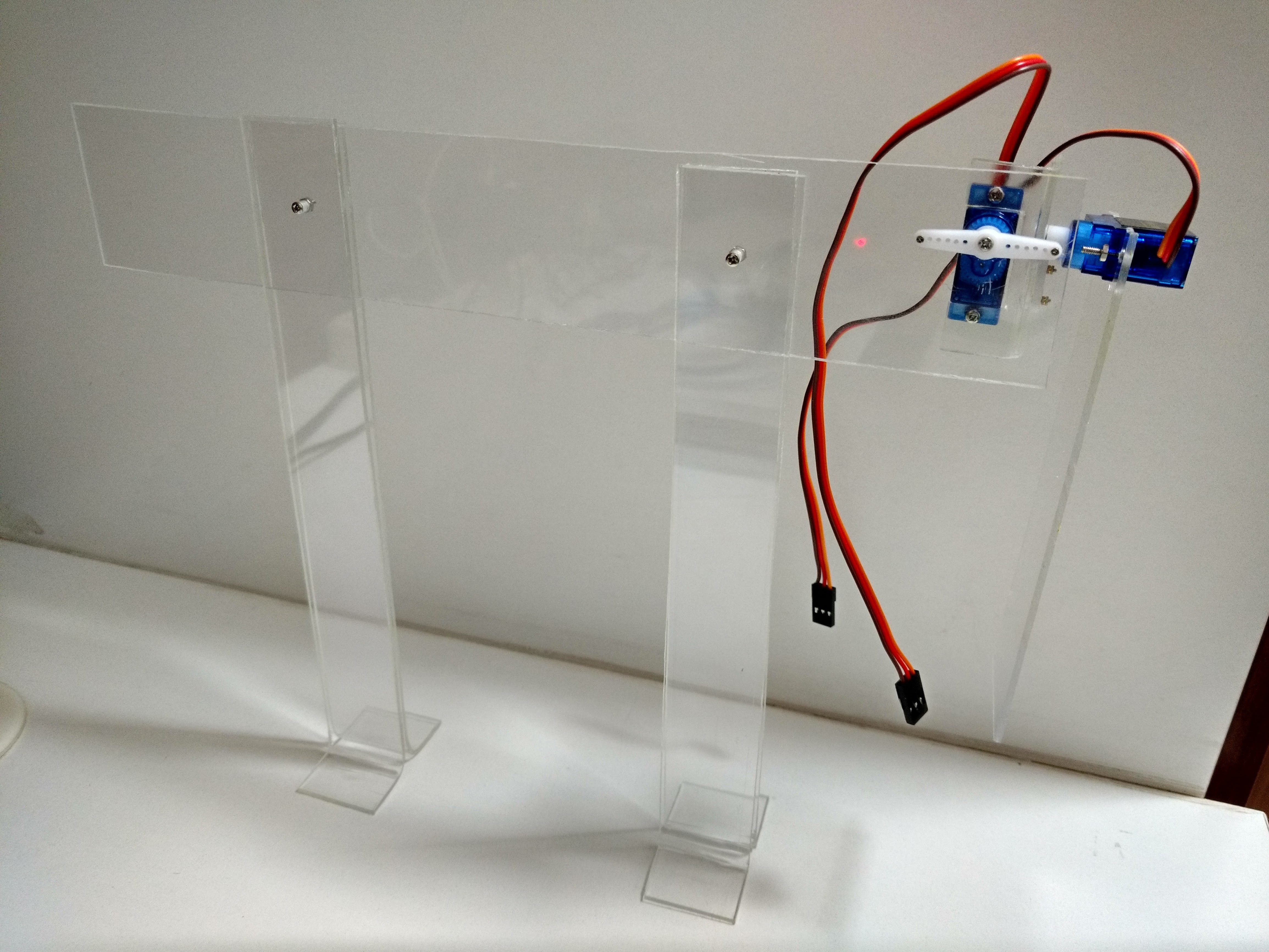
08/05/2016 at 15:49 • 0 commentsA simple acrylic skeleton was built to place each component in its position, so that the movements would be tested an to have a sense of the dimensions of the robot. The skeleton might be further used inside a 3D printed carcass.
- Dimensions of each part were marked in a 2mm acrylic sheet;
- Sheets were cutted in right dimensions;
- Holes were made for later fixation of the servomotors;
- Parts were bent applying hot air from an ordinary hair dryer;
- Servomotors were assembled in a 90 degree angle;
- Each part was assembled using bolts and nuts.
![]()
![]()
Um esqueleto simples de acrílico foi construído para posicionamento de cada componente, de forma a possibilitar os testes dos movimentos e ter uma noção das dimensões do robô. O esqueleto pode ser usado posteriormente no interior de uma carcaça impressa em 3D.
- As dimensões de cada parte foram marcadas na chapa acrílica de 2mm;
- As chapas foram cortadas na dimensões corretas;
- Foi feita a furação para posterior fixação dos servomotores;
- As peças foram dobradas usando ar quente de um secador de cabelos comum;
- Os servo motores foram montados em ângulo de 90 graus;
- Cada peça foi montada usando parafusos e porcas.
-
Face expressions: animated
08/02/2016 at 14:13 • 0 commentsThe following video show some of the facial expressions programmed so far into the Arduino code: happy, sad, dead , tongue out, sleeping, disgusting and talking faces.
O vídeo acima mostra algumas das expressões faciais programadas até agora no código do Arduino: face feliz, triste, morta, com a língua para fora, dormindo, com nojo e conversando.
Robô da Alegria ("Joy Robot")
"Robô da Alegria" is a project to help the interaction with kids in children's hospitals


 The fist part is the joint where servomotor is attached. It was 3D printed in PLA, and the SG90 servo was mounted using bolts and nuts.
The fist part is the joint where servomotor is attached. It was 3D printed in PLA, and the SG90 servo was mounted using bolts and nuts.