 nerd.king
nerd.kingAfter failing to fund the OpenRover prototype a couple of years ago, I decided to take a more incremental approach. OpenBLDC is a shield and eventually an integrated arduino with a ros interface.
0%
0%
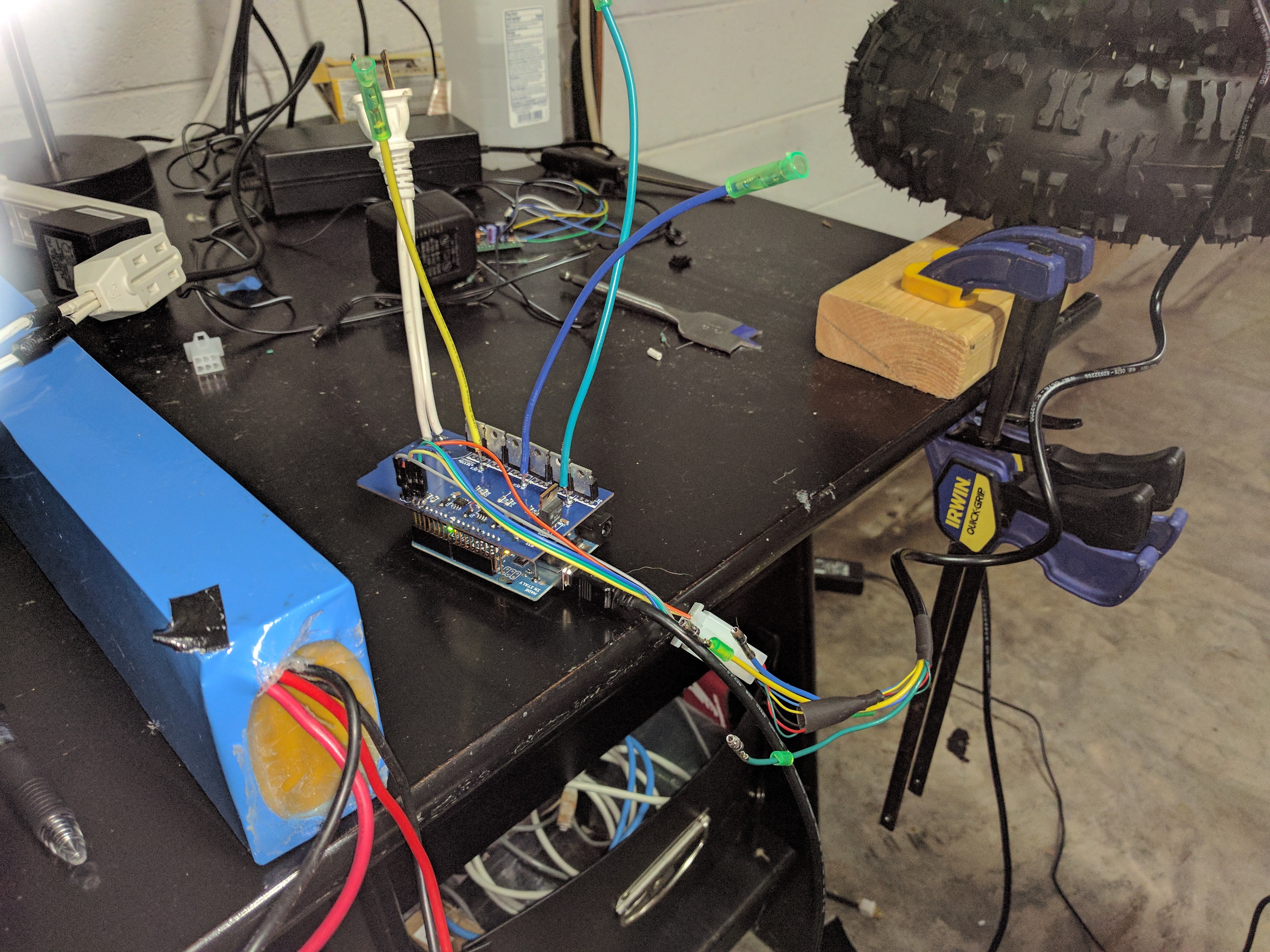
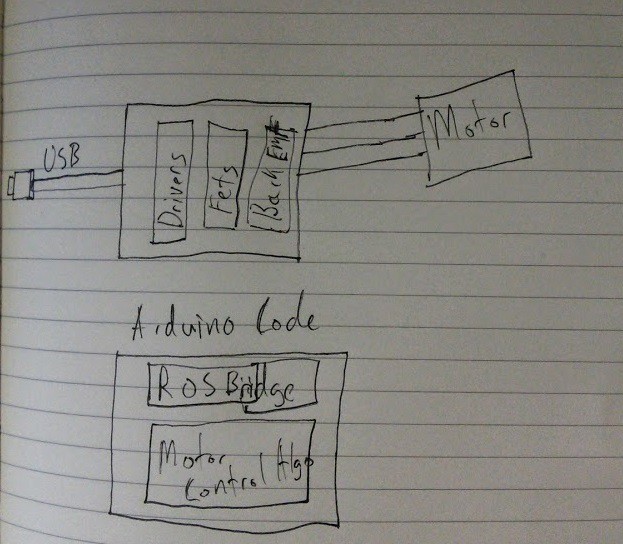
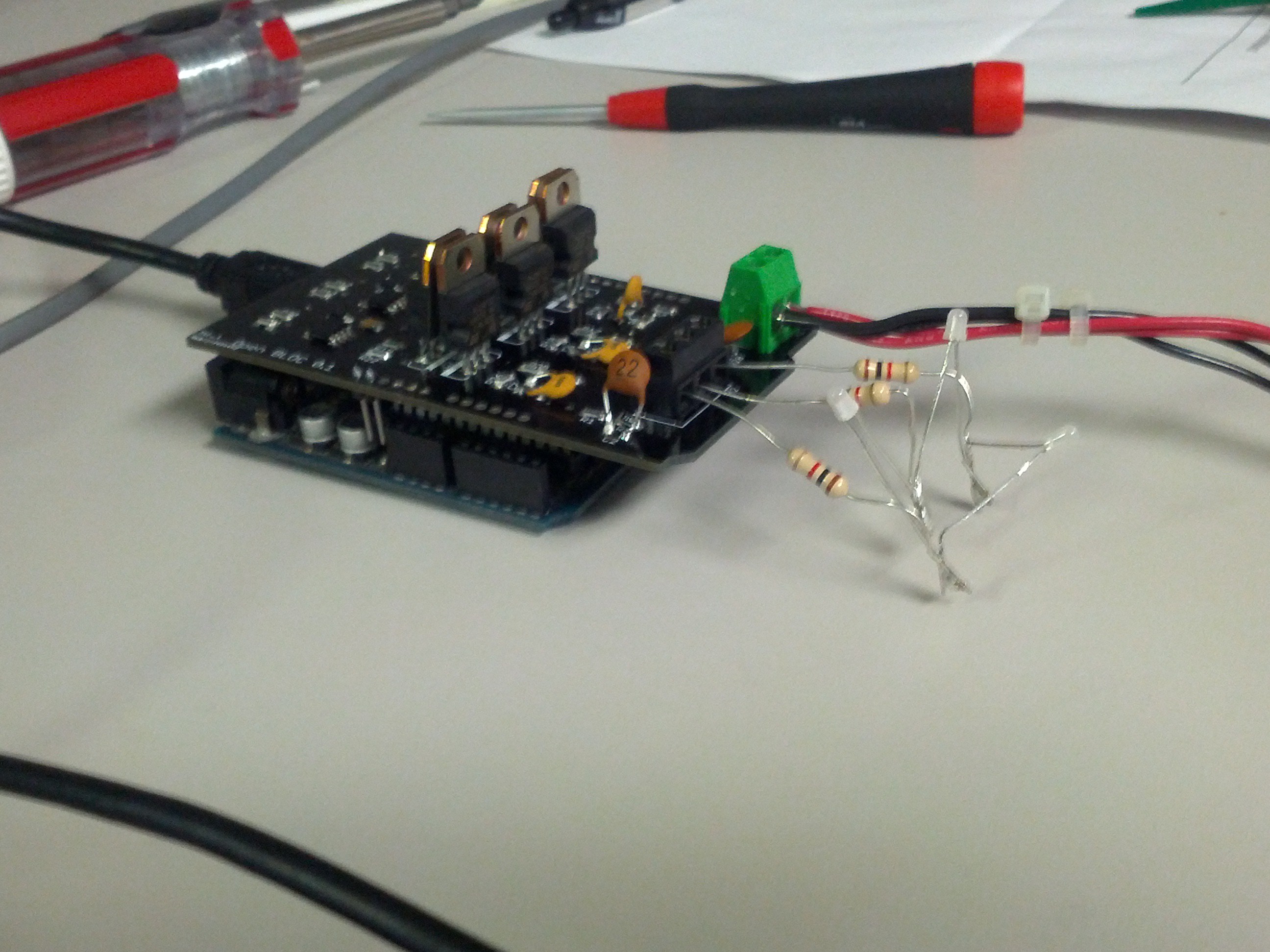
OpenBLDC
BLDC shield for arduino and stand alone controller
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests











hi can you help me please?
I need to replace ir2101 with ir2113 for prototyping... but I need help...