Zed Cat
Zed Cat-
Happy Hacking!
10/22/2018 at 13:02 • 0 commentsThe GePS sound module (GePS-MAIN.pd) is written in Pure data and features a modular structure, allowing you to extend the sonic capabilities by adding new submodules.
GePS TRANSIENTS (geps.transients.pd): Plays percussive slices of an audio file by the flick of your finger. Depending on the intensity of the flick, different slices are selected. When increasing the amount of movement, a soft carpet of granulated impacts becomes audible.
GePS FREEZER (geps.freezer.pd): This freezes and unfreezes whatever audio signal you send into it, by the flick of your finger. The frozen sound is played back at varying levels, depending on the intensity of your movement.
Just recently, we implemented a Pure data external in C featuring the feedback network algorithm discussed in our research paper. Based on that external (fbnet~) we implemented a new GePS submodule, called GePS FBNETWORK (geps.fbnetwork.pd), featuring a network of resonating awesomeness! Wave your hand to agitate it, get it roaring!

To get you started with developing your own modules, we prepared a template (GePS TEMPLATE, geps.mod-template.pd), that you can copy and modify. In itself it just plays back a sample when you flick a finger. But this was the starting point of all our modules. Let your creativity run free!

Your very welcome to add your externals and modules as pull requests to the repositories (for externals, for modules). We'd love to see what you make of it!
The structure of the GePS sound module is thoroughly documented on our website (including serial transmission, various patchers and abstractions). You can find instructions on how to treat the raw sensor signals and how to use this data to control you modules, how to structure your performance etc.
We constantly work on this instrument for our own performances. You can expect more extensions to the sound modules to be added to the GePS repository over time!
-
Prototyping the sound module
10/22/2018 at 12:07 • 0 commentsFinding an audio interface
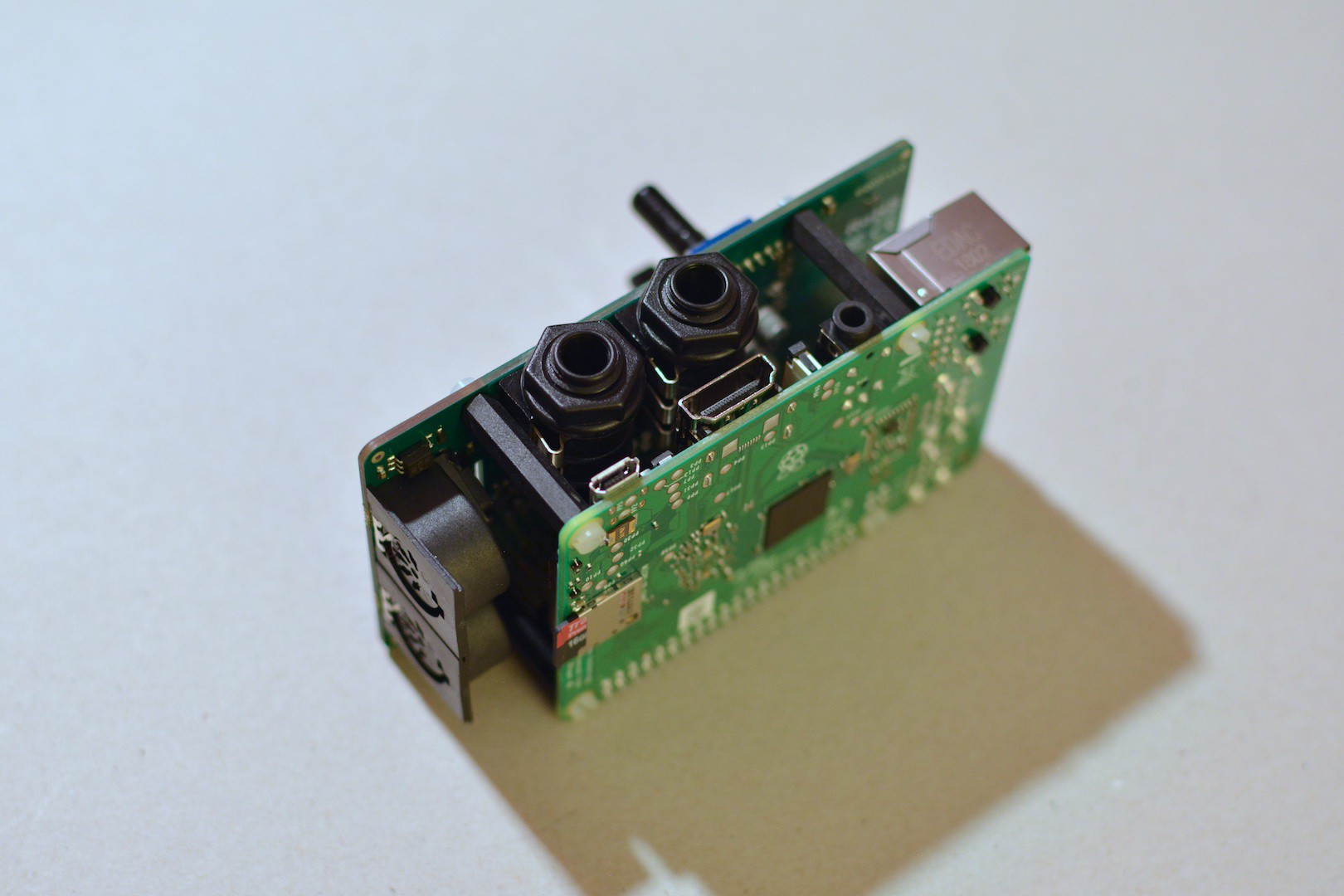
The analog audio out (1/8 TRS socket) of the Raspberry Pi is not really useful for playing high quality audio, especially not if it should be amplified to higher sound pressure levels. One can hear a lot of noises caused by interference on this output, depending on how the Raspberry Pi is used. Over the last few years we tried out several interfaces, also USB connected ones, and we finally settled with using pisound by blokas.io with the Raspberry Pi. It provides super high quality, ultra low-latency sound in- and output and MIDI in- and output on top of that. All in a board plugged into the GPIO pin header strip of the Raspberry Pi and held in place by 4 insulating spacers. The pisound also features two potentiometers, one for input gain and one for output volume. It's a perfect match for our needs.
![]()
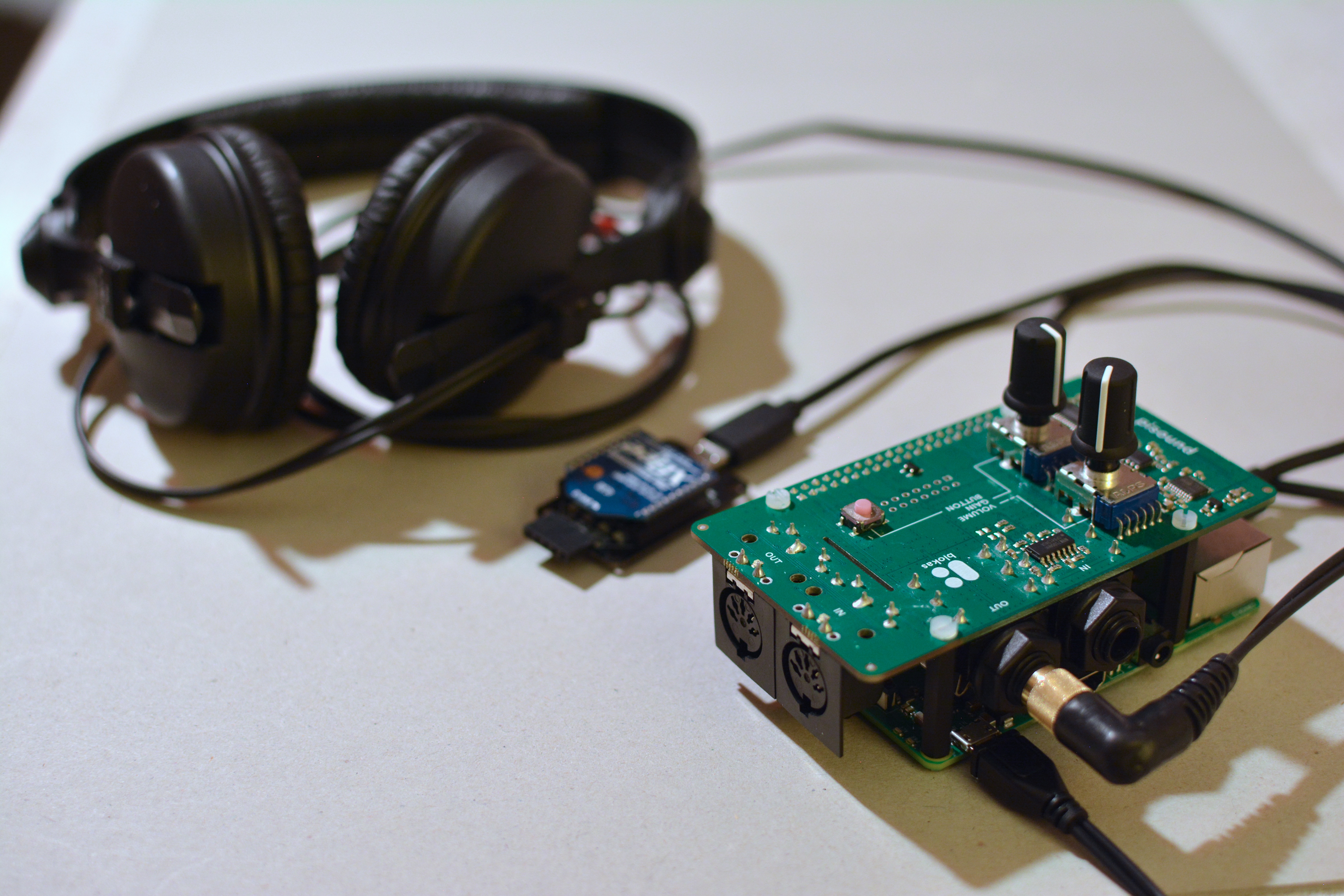
Next generation prototype
We worked tirelessly on getting the next generation prototype to run, and in the last week we finally completed it! And it's amazing! Find the build steps for detailed build and assembly instructions of the glove sensor unit and standalone sound module.
![]()
We're very happy with the results :-) We see also see the next steps we'd like to take, for example in building a stage-proof case for the unit and further integrating the glove design, making it more solid and beautiful. Here's our 3D model of what the case could look like:
![]()
Automating the installation process
Usually a tedious, complicated installation procedure awaits you after copying the raspbian image to the Raspberry Pis SD card. But fear not! In order to simplify the installation process of the Raspberry Pi sound module, we put together an Ansible playbook for provisioning. In addition to that, we integrated the build process into a script, which in turn is also run by the Ansible playbook. Here's a list of all the tasks at hand, so you get an idea of what's being automated:
Ansible Playbook
- Upgrade raspbian
- Install the software dependencies for building Pure data and dependencies/externals (gcc, automake, ALSA and FFT dev libraries, libtool and git)
- Add the pisound package repository
- Install the pisound packages
- Disable unnecessary services (pisound-ctl, pisound-btn), as they consume a lot of resources at times
- Configure the default sound card (pisound)
- (running the build script, see below)
- Enable starting the GePS sound module (with a systemd system unit) when booting the Raspberry Pi
The build script
Building Pure data and dependencies from sources, install the GePS package
- Pure data (vanilla, release 0.49)
- pd-cyclone (latest)
- list-abs (just install, no building required)
- pd-freeverb (latest)
- comport (latest)
- geps-externals (our GePS externals library)
Finally the GePS package is cloned from github
You may hack away on your Raspberry Pi sound module, and whenever you think it's all in pieces, just run the playbook again to get back to the roots!
Happy hacking!
-
Transmission Error Correction
10/20/2018 at 15:26 • 0 commentsWhile achieving great results with our efforts to reduce latency between sensor and sound module we noticed a little problem: At higher baud rates than 38400 baud the connection (radio transmission) becomes slightly unstable at times, resulting in dropped bytes. The serial bytes parser in the sound module doesn't like that very much, as it messes up the sequencing of the sensor data. You may notice byte drops as very narrow peaks in the sensor data plot.
To counter this we implemented a watchdog that notices when an unexpected value appears in the place where we usually see the sequencing byte pair (255 255, or 65535 expressed as a sensor reading). The watchdog will reset the sequence to latch onto the next sequencing byte pair, and will repeat that every second until the flow of sensor data is correct again.
You can find the corresponding commit in the GitHub repository (commit 8d2a166a).
A note on data sequencing
To transmit the sensor data with maximum resolution but least amount of overhead (no axis labels), we chose to define a sequencing byte pair that the receiver (the sound module) can uniquely identify as the start of the next sensor reading. To make the least compromise on sensor reading, we limit the resolution of each axis to 2^16-1 values. The range of values starts at zero, therefore the highest value a reading will show is 65534. The value 65535 is reserved as the sequencing byte pair (as this value gets split up into 2 bytes, each of value 255).
While splitting the high resolution values into bytes for serial transmission we still have to take care that the last byte of one axis value (LSB, least significant byte) and the first byte of the next axis value (MSB, most significant byte) do not combine to the sequencing byte pair. This looks like a rare case, but at that data rate even this becomes frequent, especially when performing. So if we encounter such a case, we subtract 1 from the LSB in question (check out the file arduino/sensor_data_tx/sensor_data_tx.ino for implementation details).
If you pay close attention you may ask yourself "what about the case of a sequencing byte pair + 255 of the following axis first byte"? This is a good question, but it's not a problem: On the receiving end the parser matches the first two bytes of value 255 and the following one will be interpreted correctly as what it is.
The only case this could break is when the first byte of the sequencing pair gets lost in transmission. Furthermore, if bytes get lost on the way to the receiver, the counting of the sequence gets out of order, and we can't properly parse the data anymore. But since this update: fear no more! The byte stream is being watched by the sharp eyes of our watchdog and hickups are quickly dealt with.
-
We're excited!
10/20/2018 at 14:13 • 0 commentsWe're tirelessly working on our project, and we're making progress! The project logs and build instructions are going to be updated very soon.
But first! We're very happy to share with you that we are among the finalists of the Musical Instrument Challenge of the 2018 Hackaday Prize. Yay! We keep you posted.
![]()
-
Sensor Hardware Integration
10/07/2018 at 16:47 • 0 commentsGoals
The first issue we attack is the integration of the sensor unit:
- Better form factor for easier wearability. It should be possible to sew the unit into the glove.
- Bring down latency: Lower latency for better performance experience through improved fusion of movement and sound
- Add a switch to turn it on and off
So far we had good results with using the custom Arduino design described in the last project log. But the bottleneck is at the clock rate of the MCU: It runs at 12 MHz and with all optimisations this gets us to a latency of ~4.5ms. This is already pretty good. But performing many concerts with this instrument showed us that the whole experience will benefit from decreased latency, even if it's only 2 or 3ms.
If you transmit the sensor data through wired serial connection, you can experience the difference, as latency drops to ~3.2ms. But who wants to perform with strings attached?! :o)
The first step we took is to replace the XBee Explorer Dongle by the DFRobot XBee USB Adapter V2 to hook up the XBee to the computer. This adapter features the Atmega8U2, allowing a faster and more reliable connection. Only by replacing this adapter we already gained 1.5ms!

XBee USB Adapter V2 - Atmega8U2 with the XBee attached, receiving sensor data Finding a new platform
The real issue is clock speed and the corresponding possible baud rate through wireless transmission. Coming from the Arduino Pro Mini (8 MHz, ~6ms, 38'400 baud) to the Sense/Stage Arduino (12 MHz, 4.5ms, still 38'400 baud) led us to increasing both clock speed and baud rate. The third parameter that could be an obstacle is the sensor sampling rate.
More recent Arduino boards show great specs but when it comes to the form factor, they disqualify. But one module showed amazing specs: The DFRobot Cure Nano.
- 32 MHz Clock Speed
- IMU (Sensor) integrated into the chip package
- Gyroscopes can be sampled at up to 3.2 MHz! The accelerometers at up to 1.6 MHz.
- runs at 3.3V with options for 5V
- secondary hardware serial port for connecting the XBee
- 23.5 x 48 x 5 mm.
Fantastic!
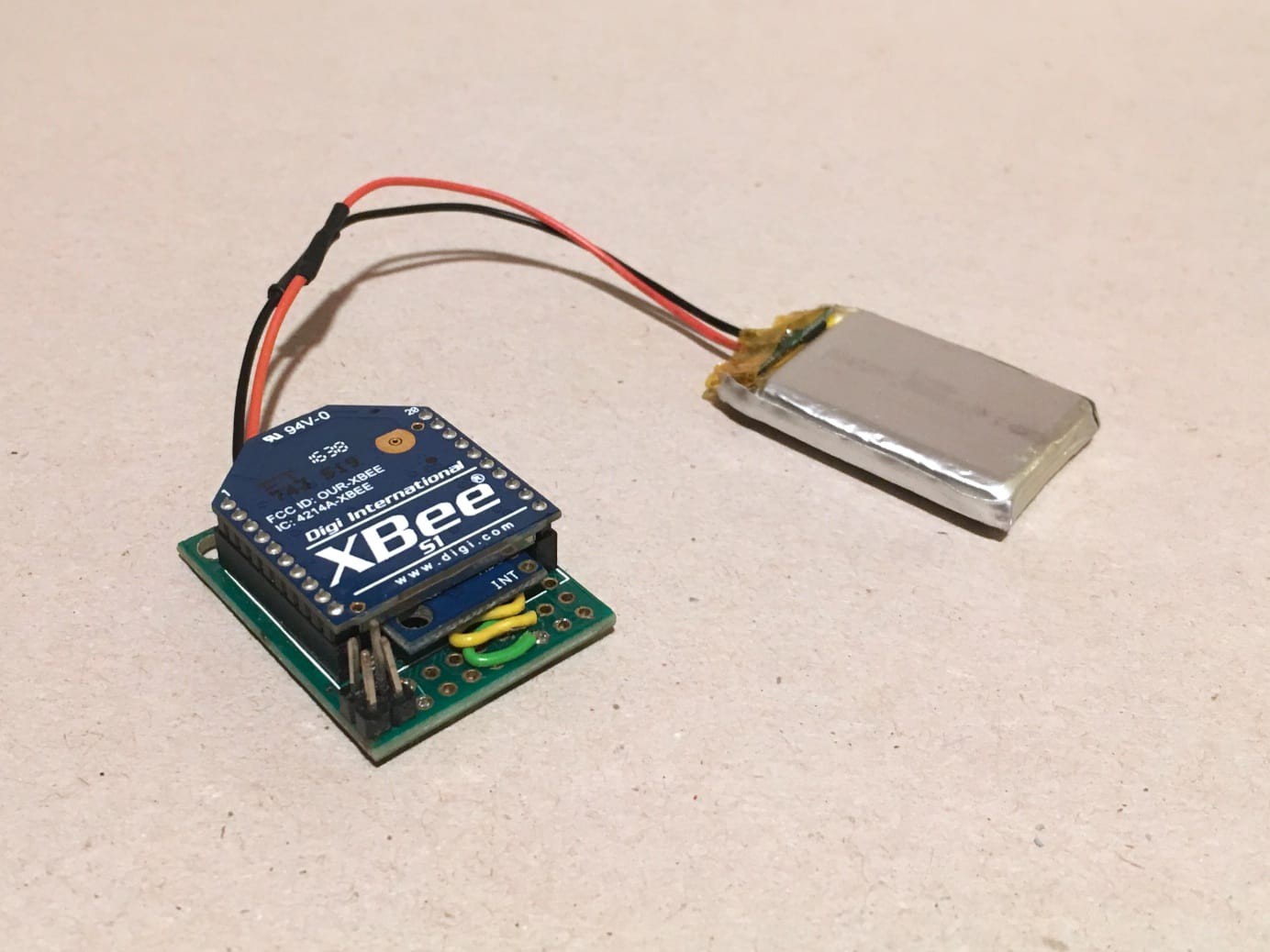
The only drawbacks to the Sense/Stage: There are no integrated XBee headers and no power switch. The missing XBee headers we use as an opportunity to move the antenna to an other position on the glove. By that we achieve better radiation characteristics (in other words: we reduce shielding the radiation by the hand or body of the performer). The power switch we also sew to the glove (for the prototype we go with the Adafruit switched battery connector "JST-PH").
If you want to add another 3 degrees of freedom: The Curie Nano even features a 3 axis magnetometer (compass)! That would allow to determine absolute direction during performance (i.e. for events where you point a objects on stage / in the room).

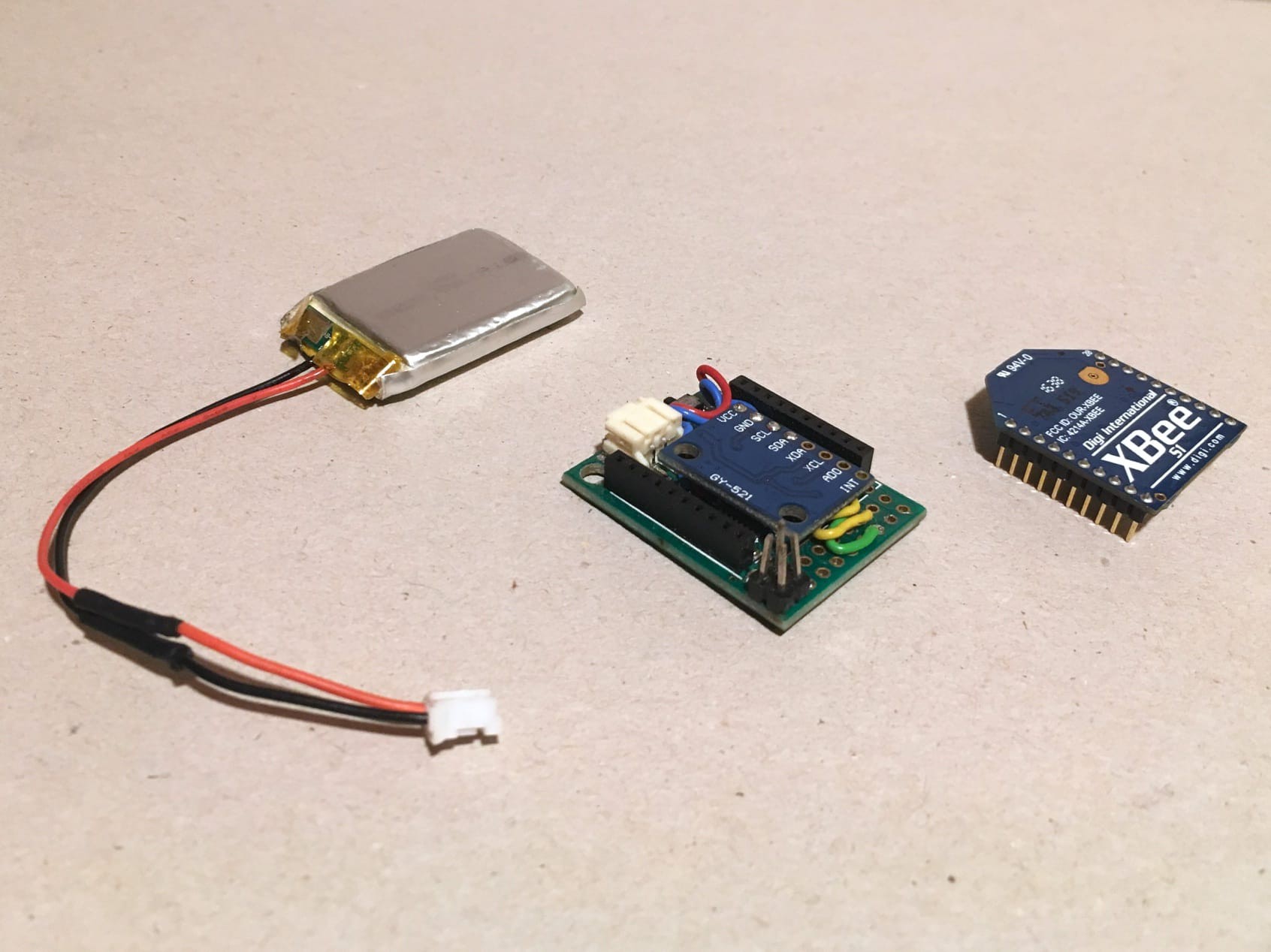
Cure Nano, XBee headers, Xbee, power switch and LiPo battery Reprogramming the sensor
We update the sensor unit code to run on the Curie Nano. This includes the following changes:
- Add include for the CurieIMU library (reference, install in Arduino IDE)
- Drop I2Cdev code (The I2Cdev library is included with the CurieIMU library)
- Replace the sensor library: We say good bye to the MPU6050 and welcome the BMI160.
- Change datatype of axis variables. This becomes necessary because the wrapper for the I2Cdev library defines other datatypes.
- Drop the XBee setup / transmission code. We use the hardware serial port of the Curie Nano
- Set accelerometer and gyroscope ranges and sampling rates
Great! With these changes alone we drop to a latency of 3.2ms!!
Increasing baud rate
The baud rate has to be changed in the settings of both XBees, the sensor unit code and testing sound module!
Increasing the baud rate delivered great latency improvements: at 115'200 baud we reached a latency of 1.3ms! But sadly the XBee connection became unstable (bytes got dropped frequently) to a degree that is not acceptable for performing on stage. Waiting for the serial buffer to clear (Serial1.flush()) and adding a millisecond after the transmission of each complete sensor reading brought back stability to the connection.
The latency is now at around 2.3ms which is still a fantastic improvement: half the latency of the Sense/Stage version and almost a third of the Arduino Pro Mini solution.

The Pure Data test patcher measures the time that passes between each complete sensor reading. 
Preparing to sew the new sensor unit to the glove. This time, the XBee will be placed outside the glove, on the back of the performers hand -
Better integration
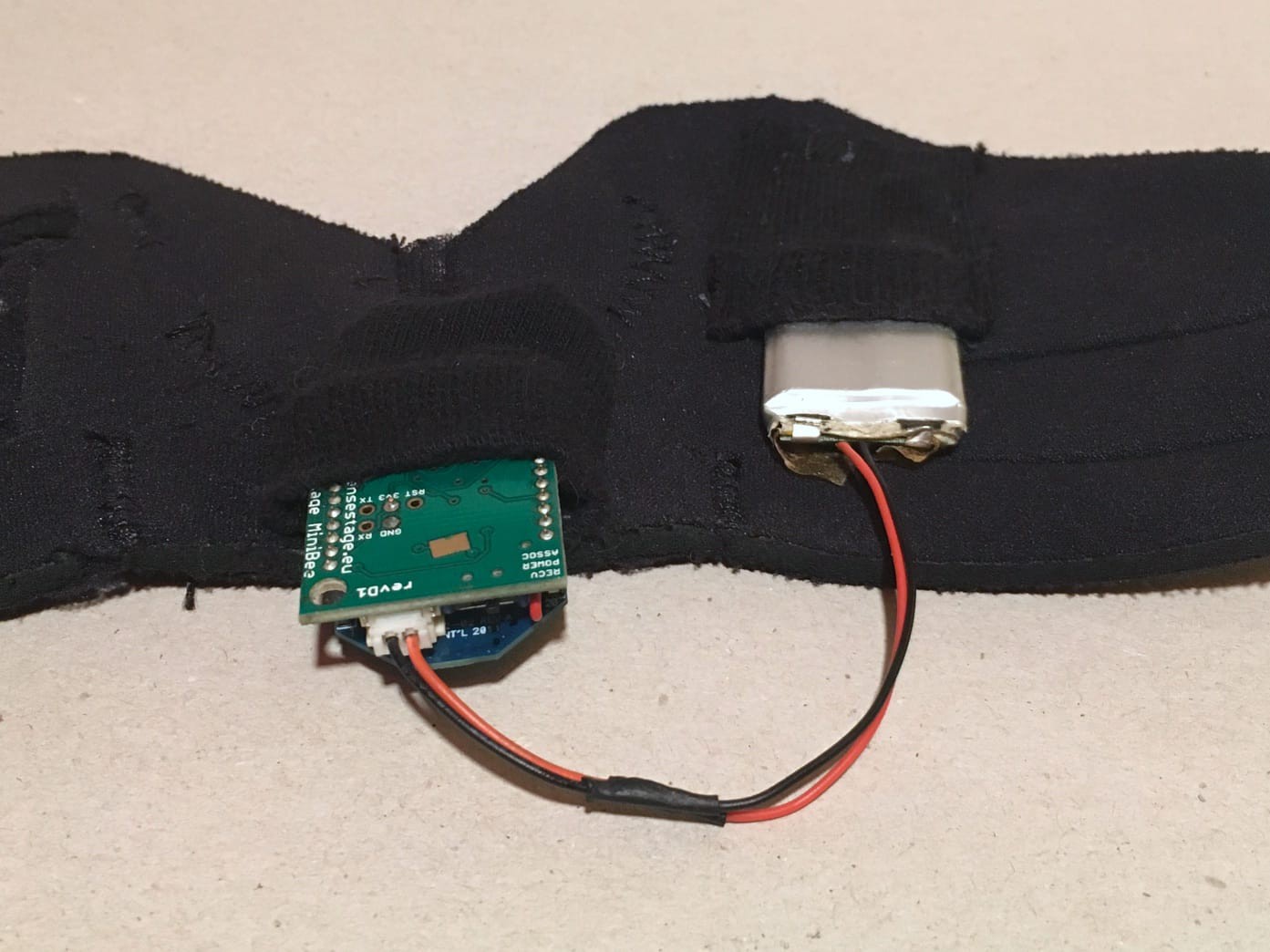
10/06/2018 at 23:37 • 0 commentsIn order to better integrate the sensor unit we tried a few approaches. The best results by far we got using the custom Arduino design (Minibee) by Marije Baalman in her Sense/Stage project:
We soldered the MPU6050 breakout board to the Arduino board. By placing it neatly between the XBee headers, the sensor is being kept in place after plugging in the XBee module. The Sensor is "sandwiched" between Arduino and XBee.
![]()
![]()
![]()
![]()
Connect to the glove
With this design plus a little bit of sewing it was possible to create a comfortable wearable instrument. We also got rid of the 3D printed case. Shrinking the whole sensor unit to around half the original size allowed placing the electronics inside the glove, firmly attached in order to capture the gestures with best accuracy.
![]()
![]()
![]()
![]()
![]()
-
Preparations
10/06/2018 at 20:58 • 0 commentsUpdating to Pure Data (Pd) vanilla
In preparation for the reinvented version - let's call it GePS 2.0 - we moved the sound modules implementation away from Pd-extended to Pd vanilla. Pd-extended has been abandoned a while ago. Miller Puckette and a nice community of artists and developers at github keep Pure data growing and updated. We can not recommend enough to dig into this fantastic piece of software and the ecosystem based on it (i.e. libpd)!
The modules still depend on some third party libraries, but since the recently released version of Pd (0.48), the deken plugin for installing third-party libraries is now included in the standard distribution. Thanks to this plugin it's very easy to install the dependencies:
- cyclone
- list-abs
- freeverb~
The changes (tagged v4.2) for the update to Pd 0.48 have been already implemented into the codebase and published to the repository. After installing the dependencies you're good to go! Be sure to check if the configured serial port is the one available on your system.
Changelog
- Version 4.2, update for Pd-0.48 vanilla compatibility (24f5b79f)
- Refactor the serialport code (2ca4ab6c, d9218c7c, 0b0971a1) -
The beginning of a new chapter
10/06/2018 at 20:34 • 0 commentsBuilding on the developments and research of our project "GePS - Gesture-based Performance System" (github, homepage) we are taking on reinventing the instrument. At the core, there are some key issues that we address:
- Better form factor for easier wearability
- Lower latency for better performance experience through improved fusion of movement and sound
- Standalone sound module to be able to play the instrument without a laptop or workstation connected.
Furthermore we aim for better hackability through more programming interfaces and updated documentation as well as new and exciting sound modules and content.
We will publish a new repository for the next chapter in the history of GePS. The legacy version will be kept available and working in the current repository, by back porting compatible changes from the new version.
Current Instructions & Documentation
We host the build instructions, research and documentation for the current (legacy) version of GePS on our homepage at http://geps.synack.ch. Here's a map to get you to the right information quickly: