 Mykolas Juraitis
Mykolas JuraitisGoal
To create a portable robot (should fit in a hand luggage) that could traverse almost any surface, would be able to carry a significant payload (at least 0.5 kg) and manipulate objects.
Current state
Here is a summary video of robot's abilities:
Here is a detailed list of what robot can do with links to corresponding videos:
- Walk on flat hard surfaces, transform to 2 wheel balancing robot to drive on soft surfaces like carpet, climb wall
- Use external objects to traverse difficult terrain
- Use onboard tools, for example, to write on a whiteboard
- Climb the slide and capture time-lapse videos
- Pump a swing
- Use skateboard
- Check for counterfeit banknotes and sanitise its path
- Drive while hanging upside down from a tree branch
- Half-drive half-walk to traverse terrain with holes like oven wire grill
- Use caterpillar-like motion to traverse narrow passages
- Open jars
- Transport objects on its feet
- Dance
- Clean flat horizontal surfaces
- Moving even placed in a bag and submerged underwater
What's next
Near term goal is to explore even more ways of locomotion. Rubber foam vacuum suction cups look like a promising way to traverse non smooth surfaces and to grab non flat objects. Find a way to move on grass and soft/dry sand.
Medium term goal is to add more autonomy. This might require a replacement for BeagleBone Blue as it doesn't have enough power to run modern tools and complex algorithms.
Long term goal is to upgrade mechanical parts (for example, replace 3D printed PLA parts with metal and carbon fibre to increase rigidity, reduce gear backlash and wear) and push the limits with more bizarre modes of locomotion.









 Ted Huntington
Ted Huntington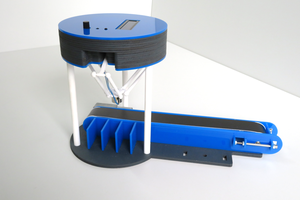
 Pascal Buerger
Pascal Buerger
 Pavel Surynek
Pavel Surynek
 deʃhipu
deʃhipu
Where are you sourcing the vacuum pump?