0%
0%
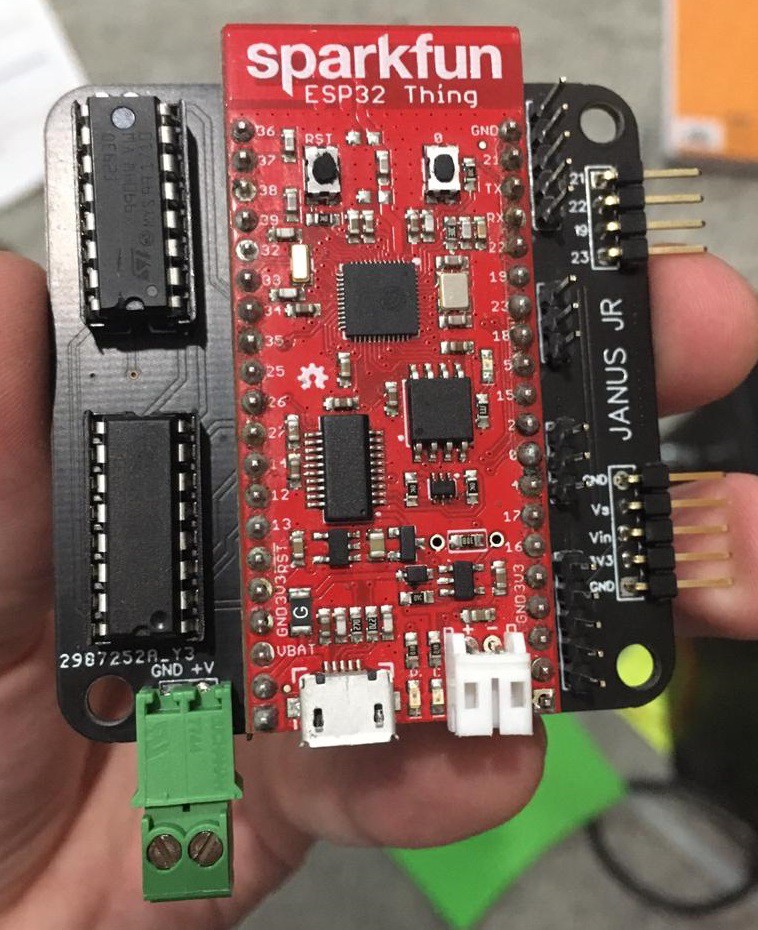
Five Bar Parallel Robot - Janus Jr
Janus Jr is a small five-bar parallel robot designed to work with brushless motors, ESP32 (Arduino IDE) and 3D printed parts.
 David Gonzalez
David GonzalezBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests




 bigbat
bigbat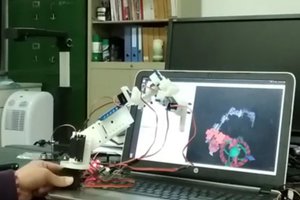
 qq95538
qq95538
 Boian Mitov
Boian Mitov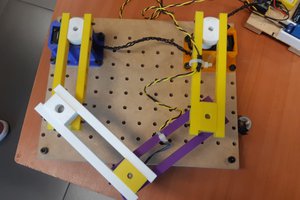
it is using bldc motors of what type? and also what position sensor are you using? more details on this project would be great. It would make a nice drawbot