 David Gonzalez
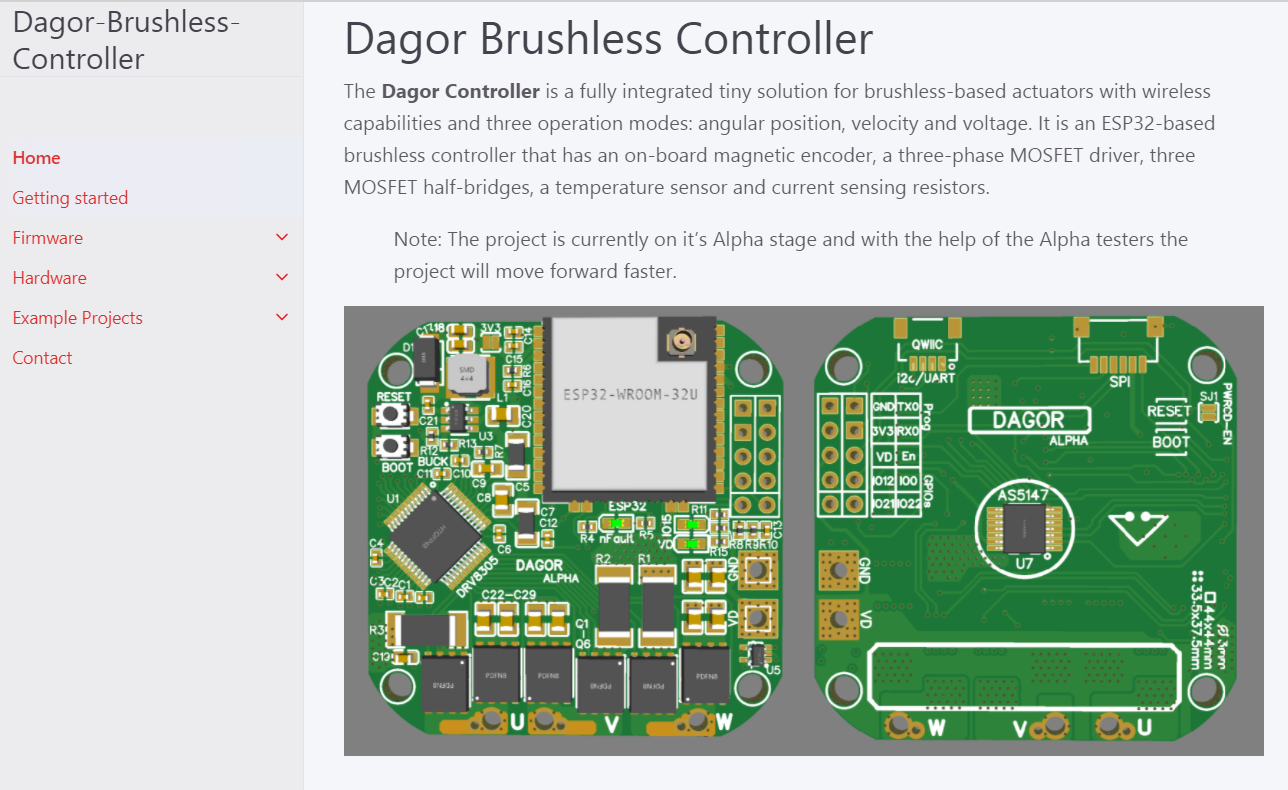
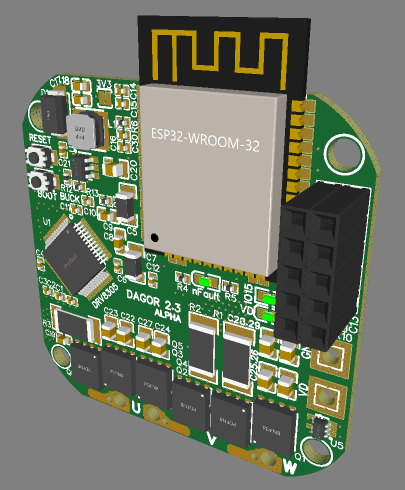
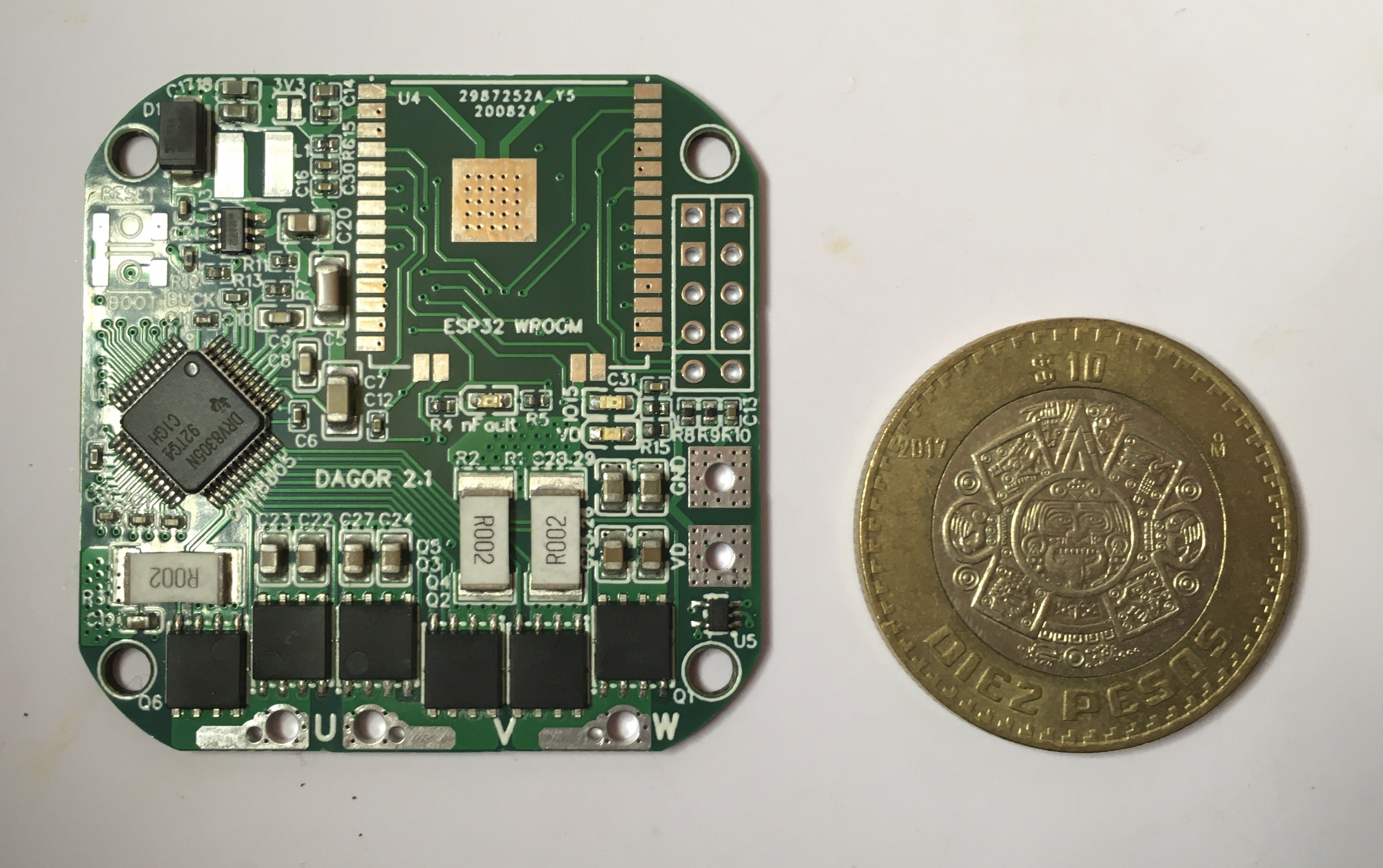
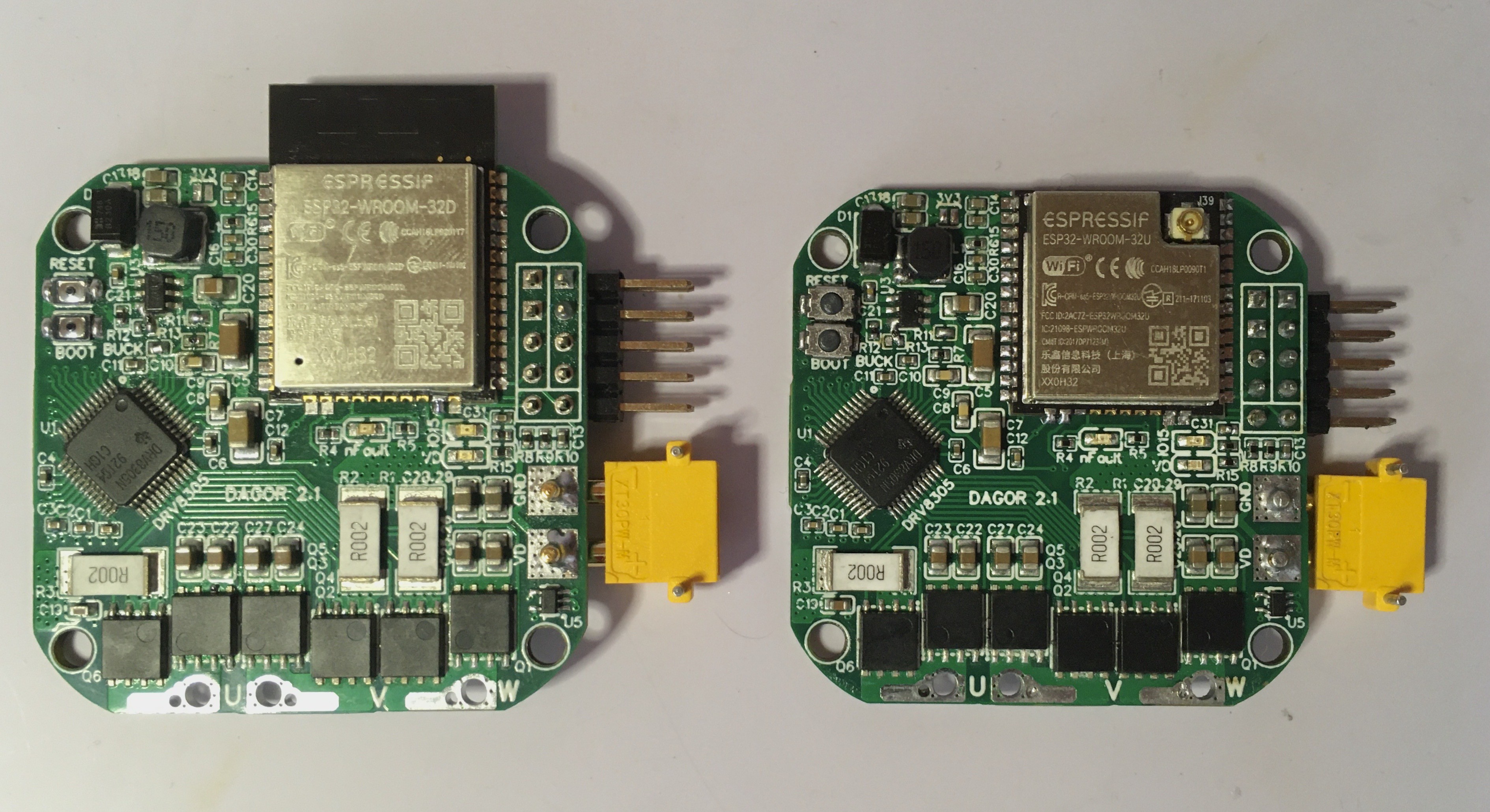
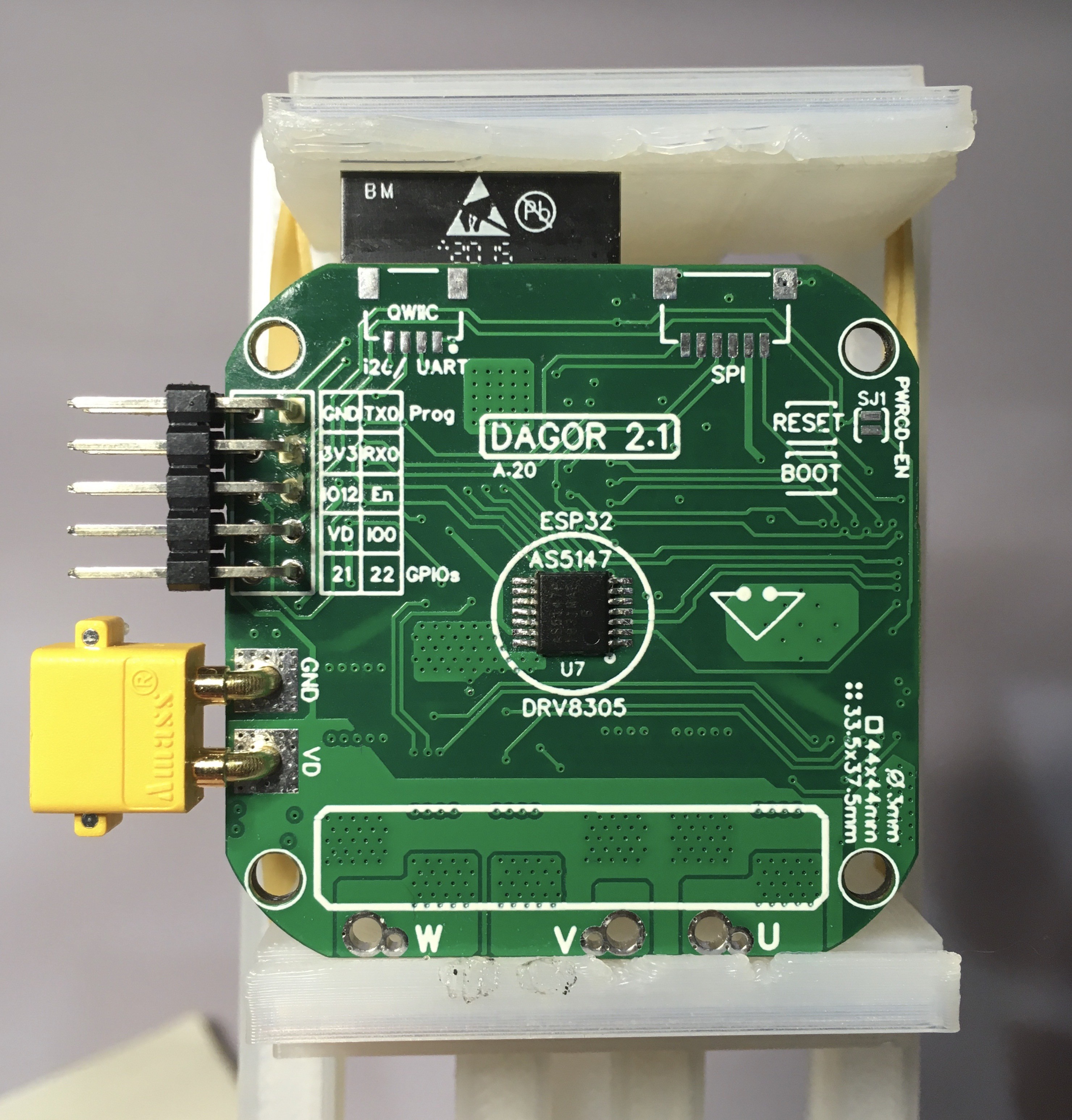
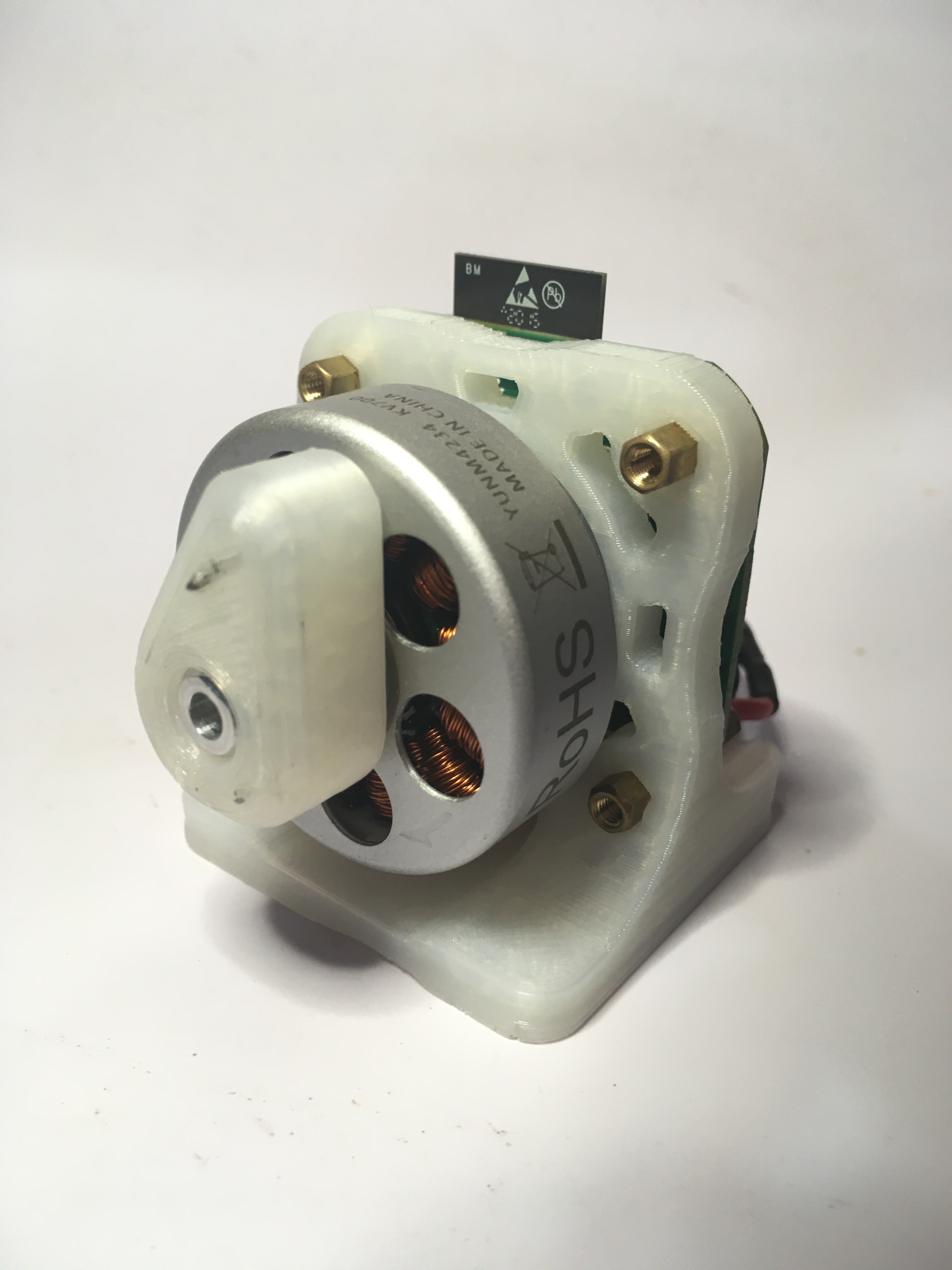
David GonzalezThis controller is based on my previous design, the board includes an on-board ESP32, a buck regulator, a DRV8305 MOSFET driver, three current sensing resistors, a magnetic encoder and a temperature sensor. I have tested wireless communication with the ESP32 through ESPNOW and it seems to work reliable and more-than-fast enough without affecting the control sample-time. With ESPNOW you could potentially create a full robot without any single cable aside from power.
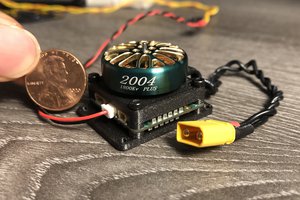
Old design: https://hackaday.io/project/173519-janus-brushless-controller-2001
The code is completely open-source and Arduino based. The bulk of the code will be based on the SimpleFOC arduino library, since it has worked perfectly in the past and is constantly being upgraded and updated.













 Christopher Xu
Christopher Xu
 nerd.king
nerd.king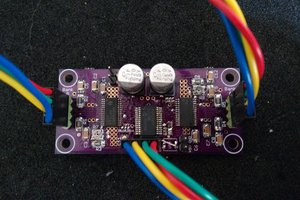
 David Brown
David Brown
 Rory
Rory
Is this project still active?