Without an actual device to test out the layout, it's somewhat difficult to get a full layout made. Additionally, since I haven't used many mathematic applications I still haven't started on TrueQuation.
I've ordered the letters based on appearance (though 13K Hackaday log words iirc), with lower movement taking priority over lower average actuation force. I've also aligned the C, V and X locations for Copy/Paste/Cut commands.
For Finger5, there would be higher dedent resistance between row 2 and 3. Tetent Search is also forceless so that a user has a chance of stumbling on it by just sliding the Tetrinsic.
Row 5 of Finger5 is mainly for quick text navigation.
My fingers are my client; at least, that's how I should consider this development process if I was some freelancer. I make a solution. I give it to the "test group". The test group hates it because I didn't really listen to them.
Finger5 is most likely to fail the entire solution, followed by 1, 4, 2 and lastly 3. This is because Finger5 needs the most accomodation.
The thickness that matters is the distance between the top of the ball-chain and the bottom of the assembly. I don't want to take Finger5 out of the equation though, because Thumb1/Finger1 has the force, speed and dexterity to actually offer 4 character chording. I'm not thinking of constantly inputting 8 characters at a time, but 4 on a single hand will be very beneficial. Remember that when this project started, I was expecting to get 4 characters out of both hands.
I've also determined that the most comfortable angle (for all but Finger1) is determined by Finger5 and is the same angle for all. It seems to be 4 or 5 degrees in the direction of Finger5 and not away from it, as I've done in #Tetent TimerSpy [gd0136].
I've thought of a concept already that could obtain this solution, where you have one side that has the tall, 20mm-ish block that has the electronics and then a thin section where the ball track. Again, this strain guage (or other pressure sensing method) is an unsolved question mark. The track would likely have to be bolt reinforced so that the part furthest from the strain sensors don't bend, reducing the accuracy of the readings.
Part of the thinness is also because the Finger1 actually intersects the other ones, mainly Finger2. This will allow parts of the track to go under others like some kind of micro overpass bridge.
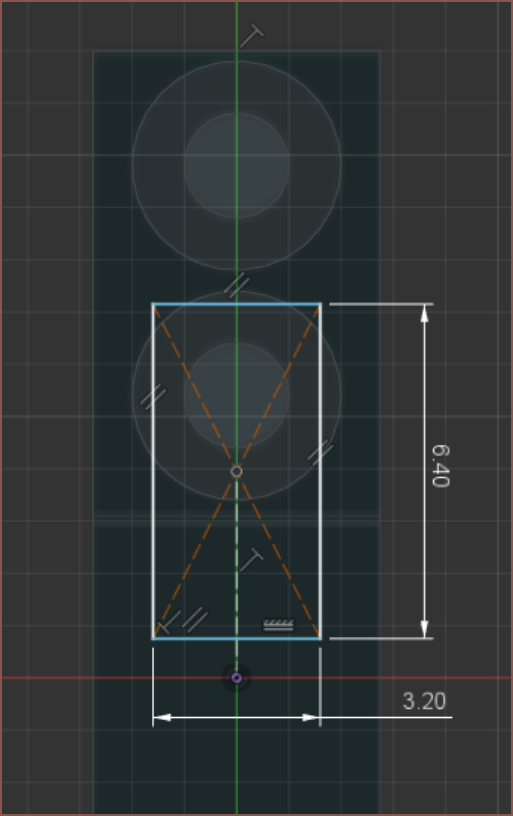
Red: Defining angle. Orange: Subsequent finger lines. Blue: Thumb line. Diagam not to scale.
I also feel like this could still be used as a VR controller of sorts. Sure all fingers would be locked into a single plane, but you could still probably get half the way to the sensation of force feedback gloves. It's not designed for that, but with the expected price tag of a single Tetrinsic, and development into AR with #T^2 TyMist [gd0138], I'd like to cover as much of a solution as possible. Everything after learning and typing fast is a free bonus.
l've simulated a simple yet seemingly inescapable deadline: Feb 1. This second term of Uni is sounding like it's really going to drain-touch my time, and all my mental simluations basically predict that if I try and obtain Tetent (unless it's practically almost done by then) afterwards, I'm unlikely to get either Tetent or satisfactory academic results.
This means that I've actually got to finalise what plan I'm doing for all Tetent projects and start ordering AliExpress parts essentially by the end of next week. The new proposed TimeSpy solution should finally address all problems that could arise, and if it doesn't... well if it was not invented here and I instead bought it, it'll be unlikely that I'd return it.
Other than #Tetent TestCut and TimerSpy, all other Tetent projects are being shelved. TestCut is really just a mount since the Tetrinsics are doing all the computational work anyway, and in an ideal solution TimerSpy would be the only Tetent needed; it could be used in the most situations and fufills a niche that existing solutions like stenography and Charachorder haven't been able to break into.
I think it would make the most sense to talk about things like the typing layout in this project too instead of Tetent, so that the information on the overal Tetent project is more centeralized.
I think the programmer industry calls this approaching-deadline situation a "sprint", so...
So I'm looking for where I misplaced my tin foil box, and I see something in the bag of TCT360 goodies I got months ago:
It's a peek print on a metal ball chain! And, conveniently enough, it's the size I've been using for the current Tetrinsic redesign. Double conveniently enough, it fits beautifully into the channel in my combination square:This means that I was actually able to try and feel what a 1-ball-track Tetrinsic would feel like.
It feels amazing.
Except for Finger5 that seems to just slide off to a side, the chain just glides beautifully under Finger1-4. (Finger1 = thumb). It looks lovely whilst doing it, and makes a very soft, metal sliding sound that's actually quite relaxing. I found a video of something that sounds like it (39 seconds mark):
It's a shame that most of the cost and complexity is in the absolute encoder and force sensor, so trying to make a Tetrinsic Tiny that doesn't have the screen + BLDC motor or limitless chain movement might just be an excessive detour.
Right now I'm reading how Plover got started through blog posts written by the project founder and it sounds like her and I are on the same page. I'm still at the 2010 blogs though, when multi-touch touchscreens were talked about as the next new thing in technology, but it sounds like she never got the wearability part (I don't know of any wearable steno machines).
The bigger problem that I haven't seen addressed is that even with the cheaper keyboards and free lessons and software, the vibe I'm getting from Quora is that stenography takes years of dedicated, multi-hour practice just to get to 120wpm... on 2 hands. I don't know of any 1-handed steno methods either.
Ms Knight also dreamed of a steno solution with haptics (I think using a multi-touch touchscreen or something to that effect) and I don't think that's materialised 12 years later. What happened to that?? Why hasn't even Apple done it in their persuit of thinness? They did it for their touchpad. Perhaps too expensive, even for them? They could always just have 1 haptic motor per column since it's not like anybody can get 2 fingers on the same column at relatively the same time.
Speaking of laptops, I don't think a BLDC motor would fit, but otherwise, a thin slider with a vibration motor and strain guages could be used for the Tetent layout.
I just got word from Me Solving Timespy that there isn't really any solutions shorter than the TFT one I've got now, and so it looks like Tetrinsic 2.0 with TFT will be the only version worth persuing if Timespy doesn't cause this solution to fail, meaning that I'd have to go back to my Tetrinsic 1st Generation days.
I'm also thinking of Tetent, and how I'd connect the two halves. Perhaps it might make sense to have a USB host controller on the PCB so that, ideally, a master Tetrinsic on one side can connect to the other side.
Me2: Why do you need USB to connect the two again?
Me1: Wasn't it for a wired Tetent connection and for audio?
It might still be useful to quickly transfer over LCD gifs/videos between all the Tetrinsics. With up to 16MB of flash, it might take a while for all Tetrinsics to update through I2C. I probably should try it first and compute a solution if it actually becomes an issue.
[8:45] One of the smallest load cells I found on the internet:
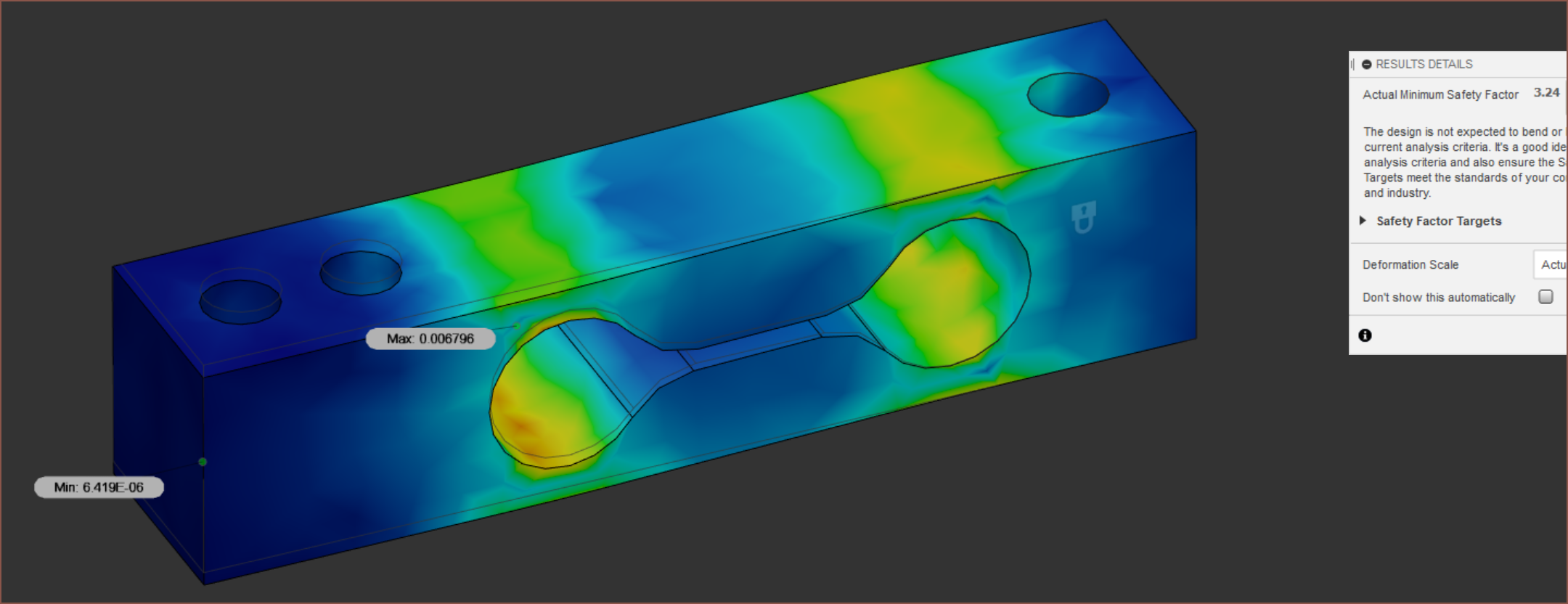
There was a model on GrabCAD. For all these simulations, I'm using 10N.
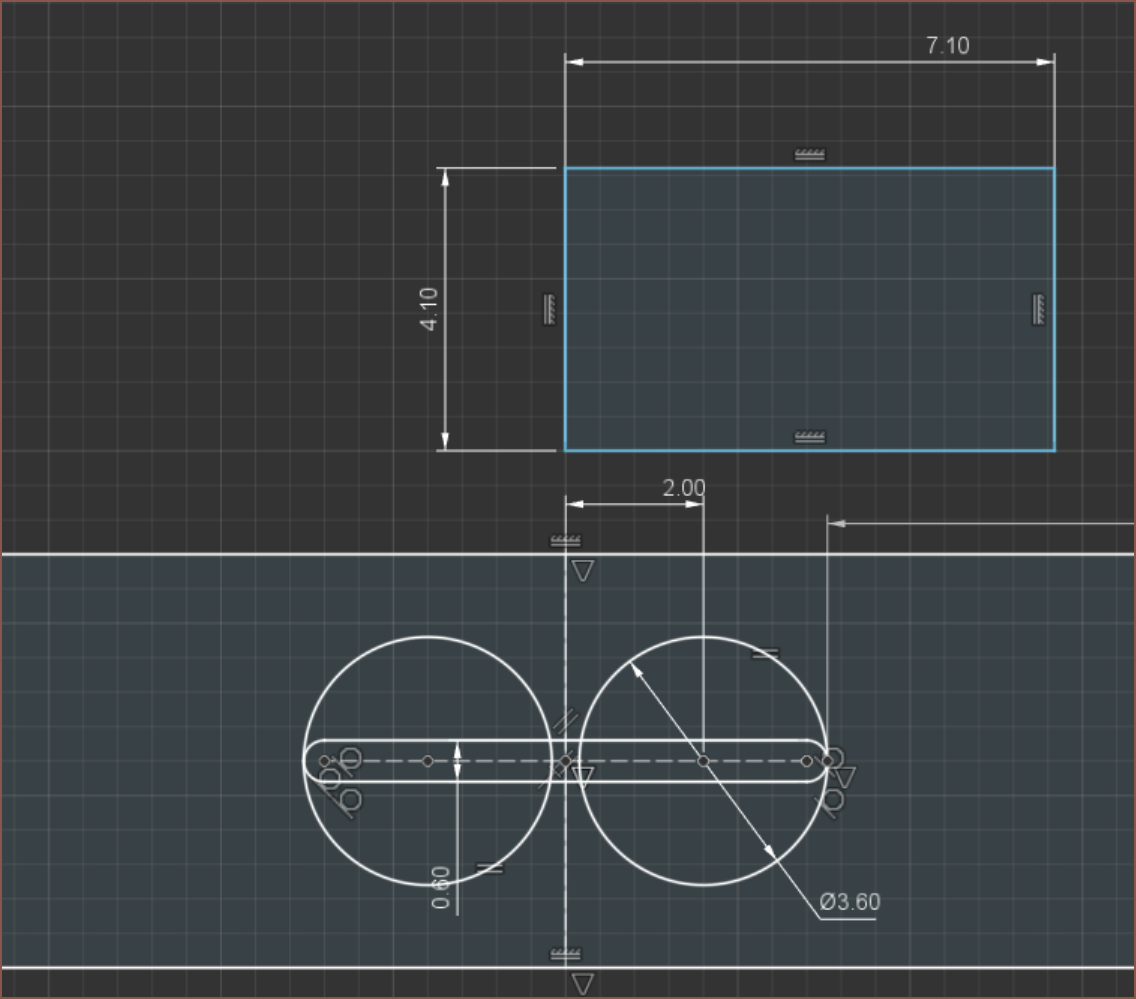
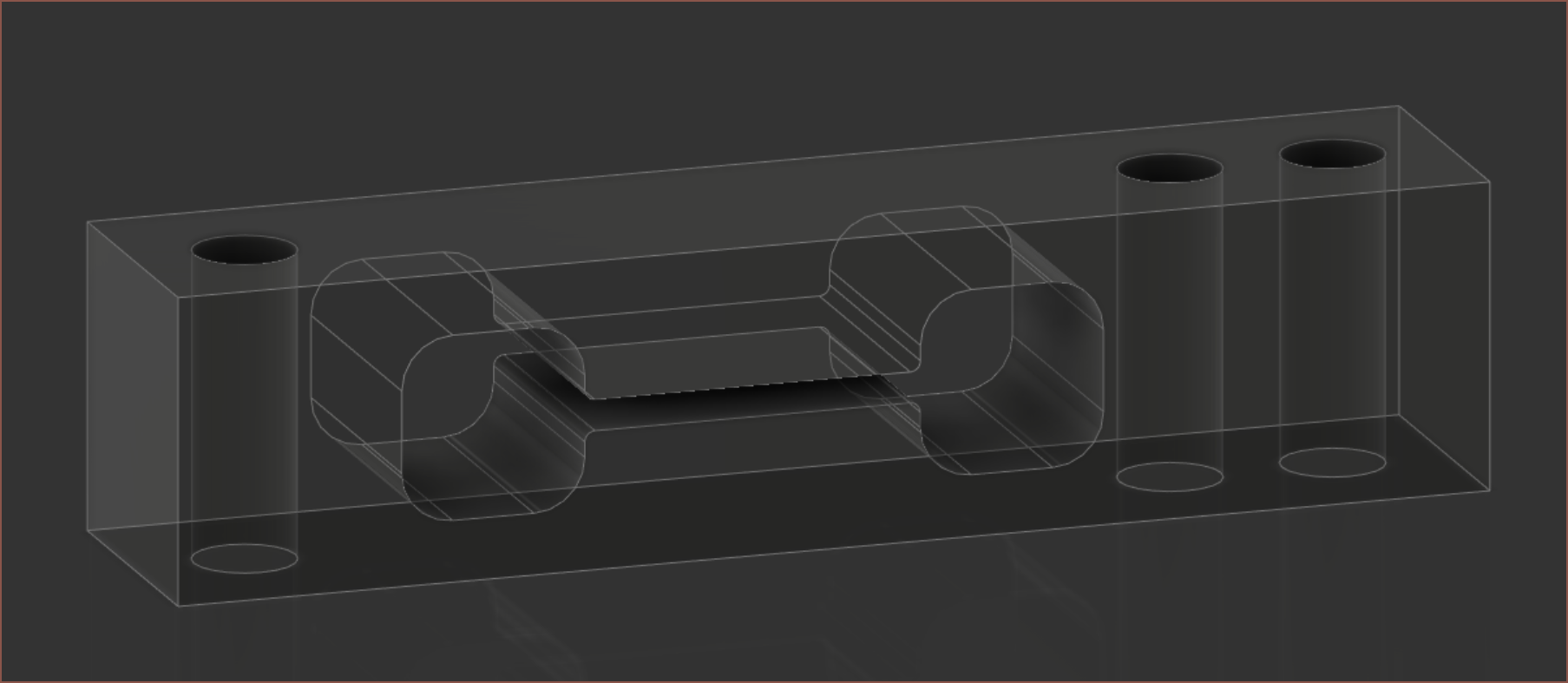
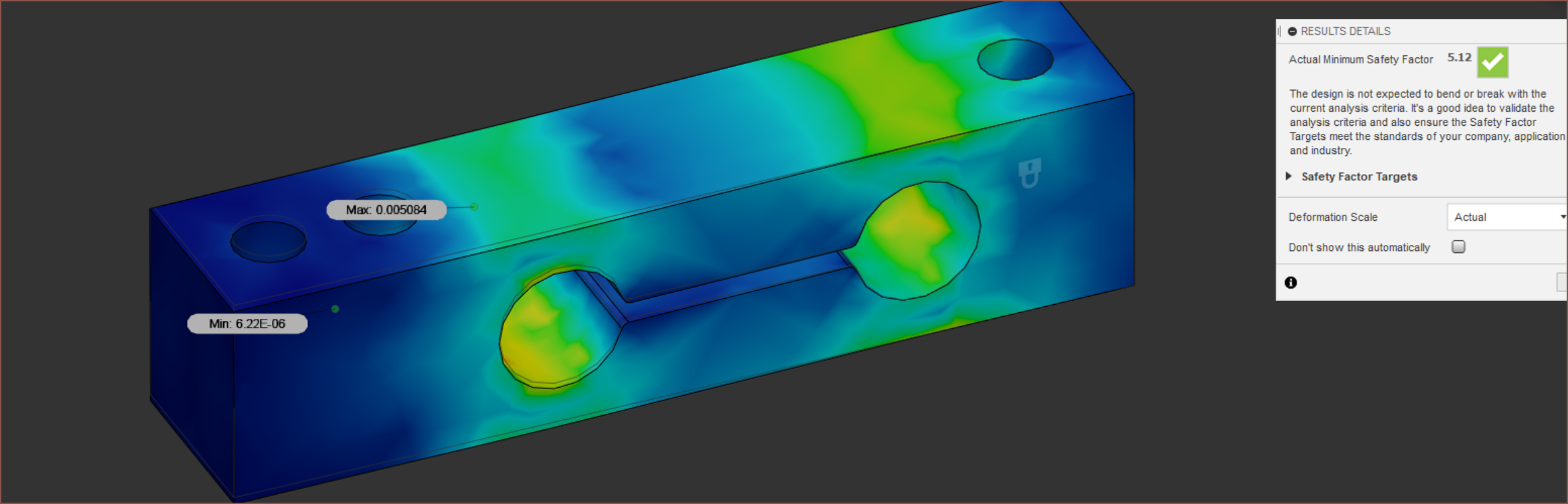
I then went and designed a 4.25x30x6mm load cell for 7.1x4.1mm strain guages. I used the PET material in Fusion360.
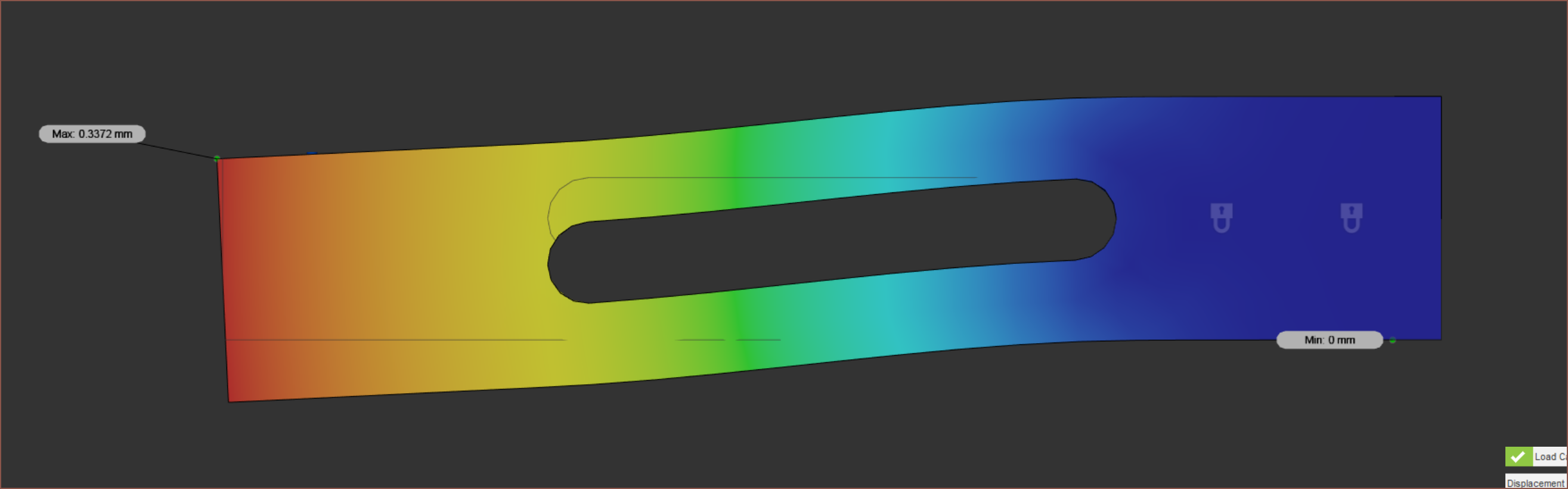
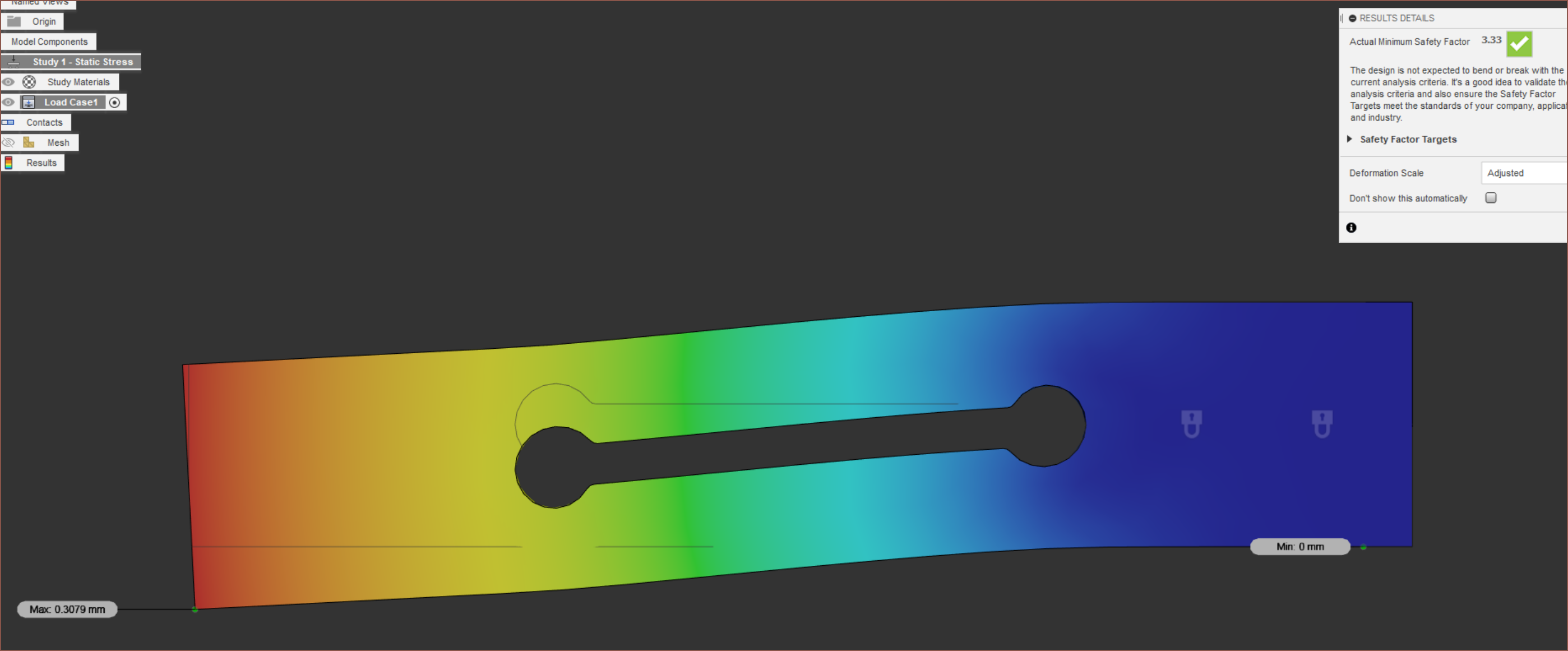
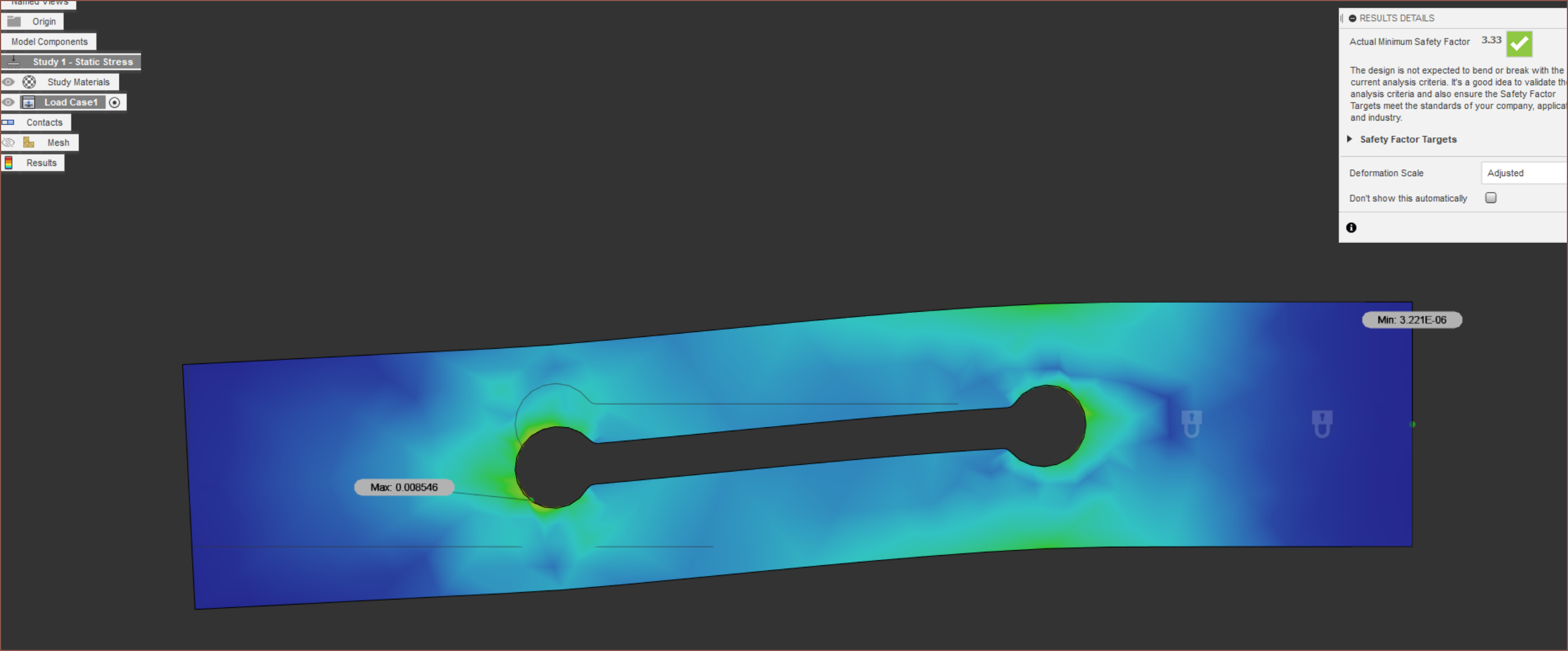
First attempt was with a 2mm slot. The aluminium cell had 6.3 safety factor and I think this one was somewhere in the 3.X range.
Trying a more bone-like shape just made things worse:
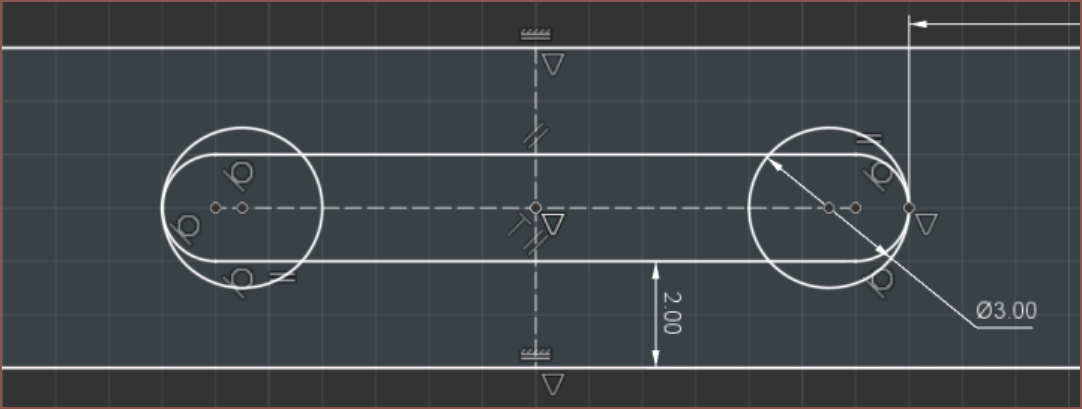
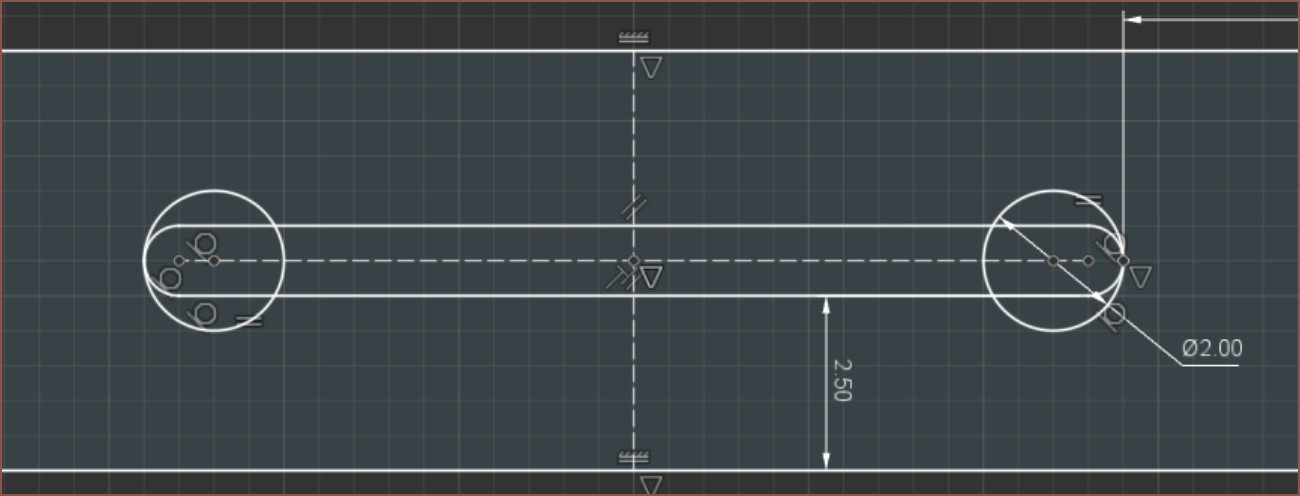
What if I keep the circles at 2mm and make the slot thinner?
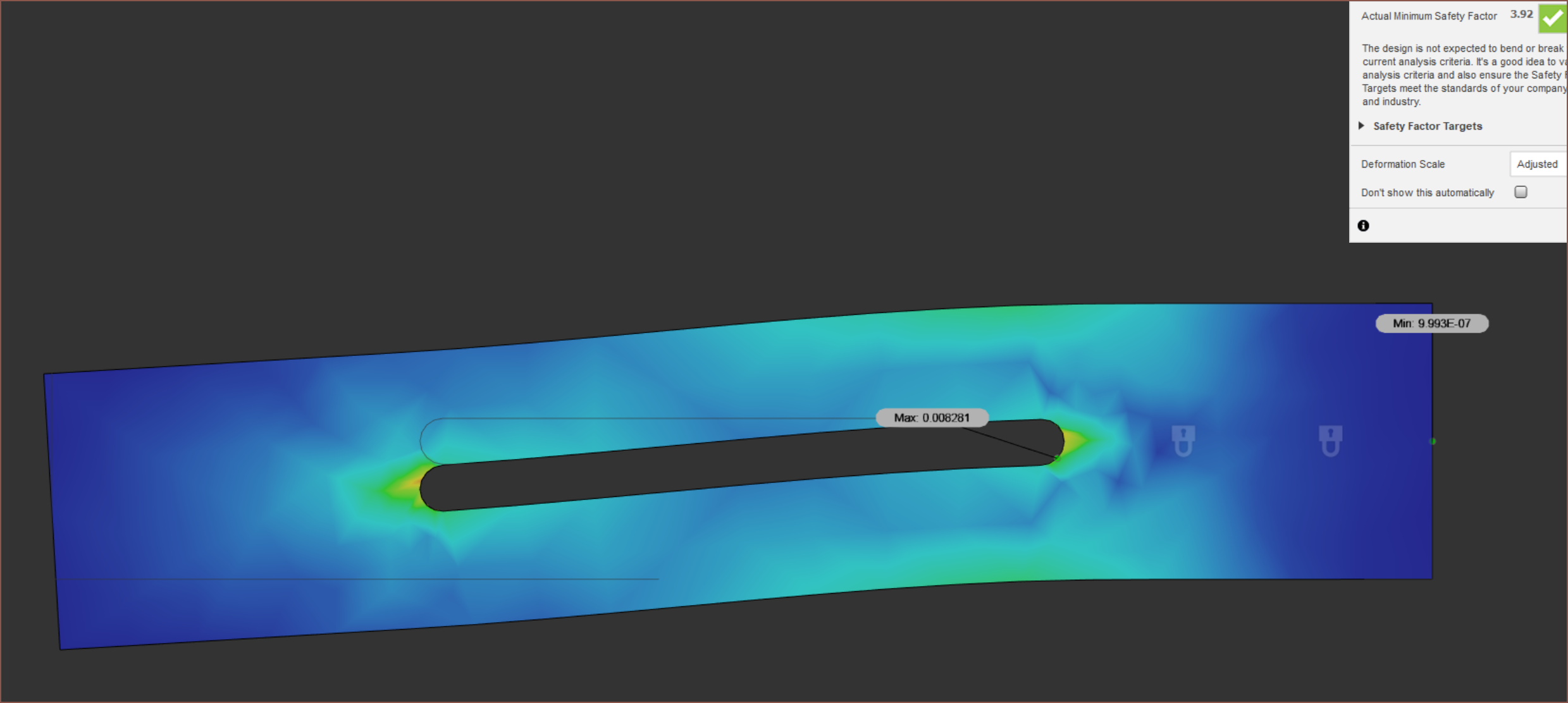
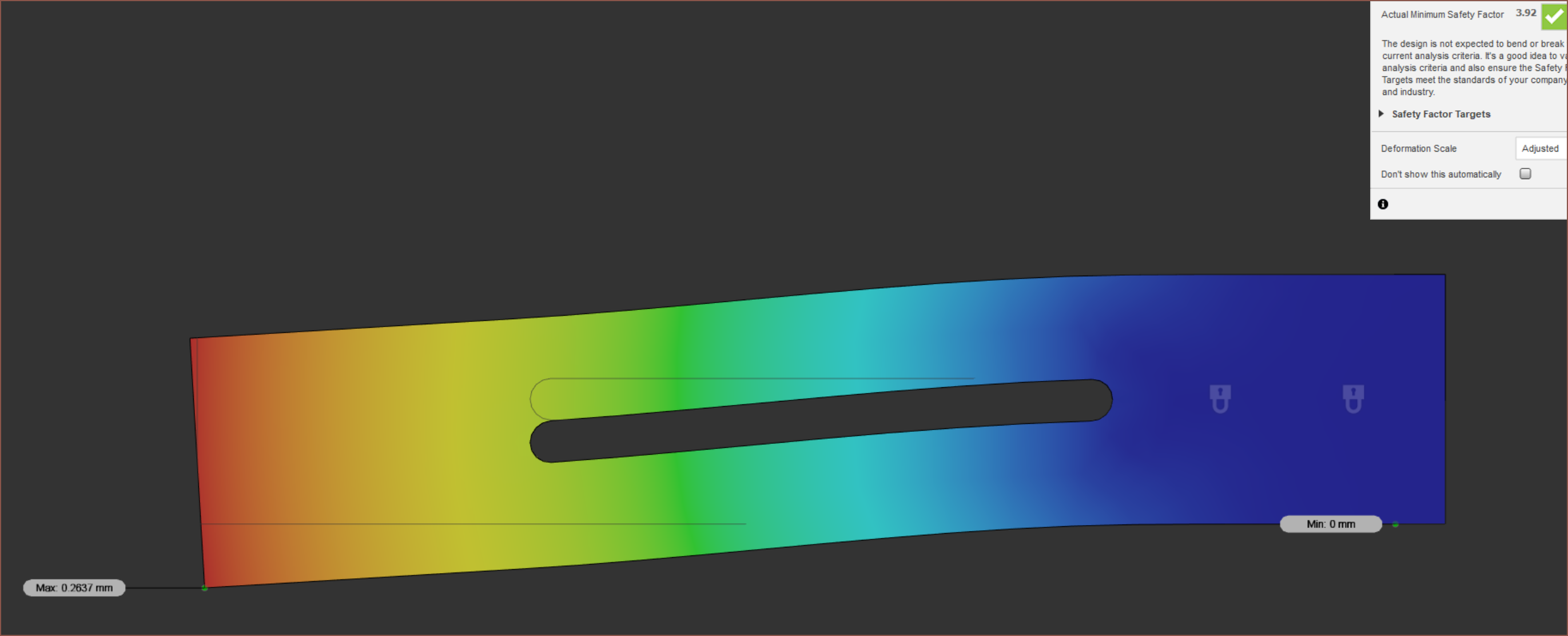
Remove the circles and leave the slot:
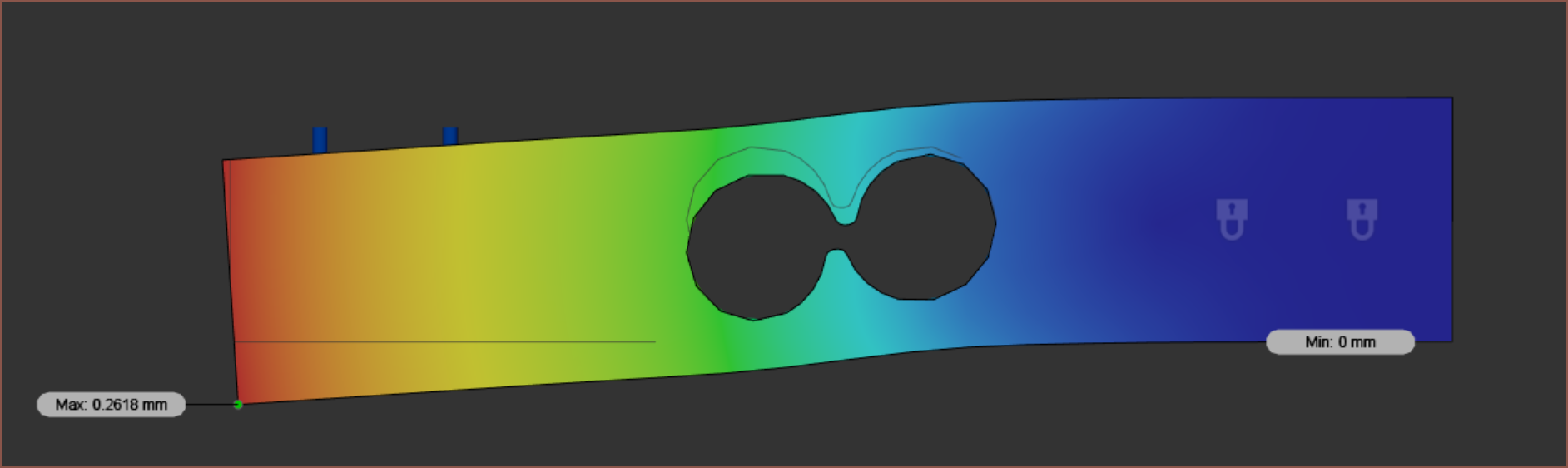
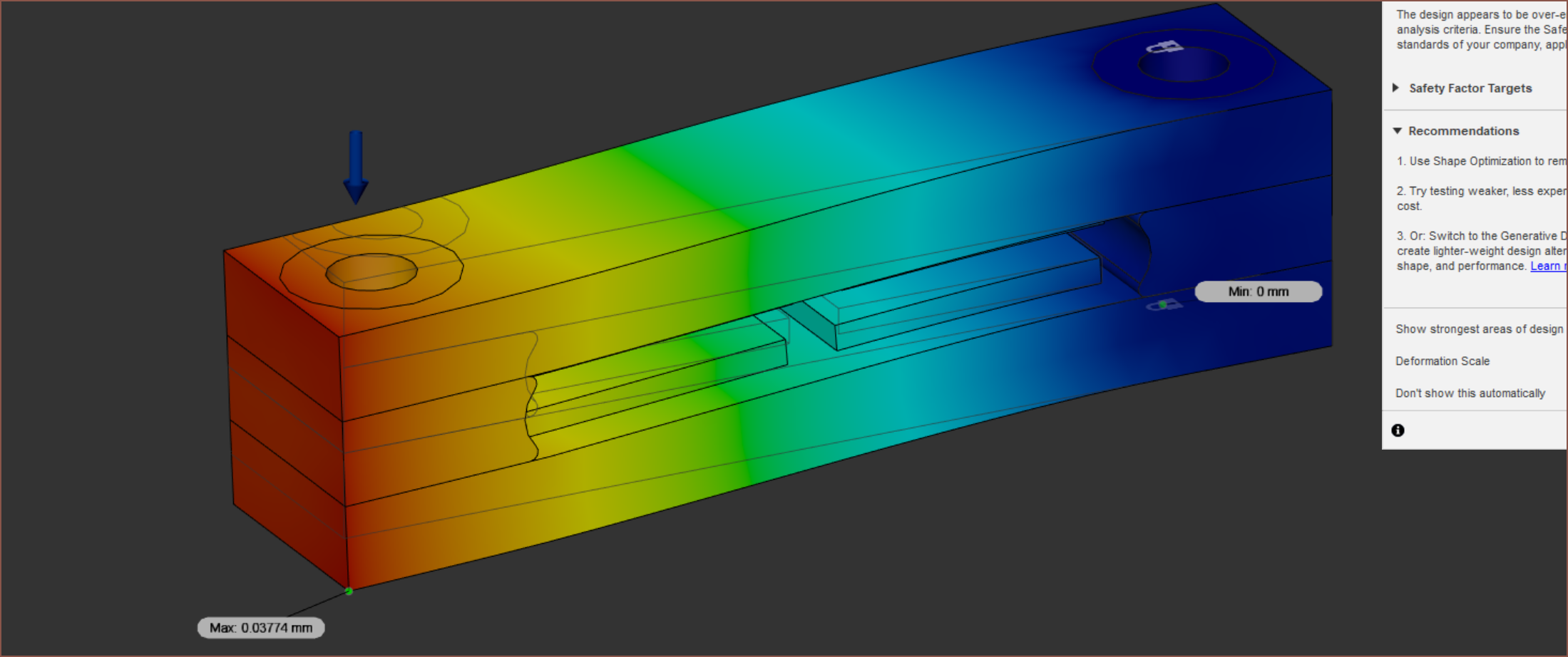
Displacement's getting better, but I'm not getting much bending on one side.
Yeah if I look back at the aluminium, the left side is all orange by the time it goes past the circle. What if there's just a circle on that side?
That didn't seem to do much.
Better deformation but worse safety factor and displacement.
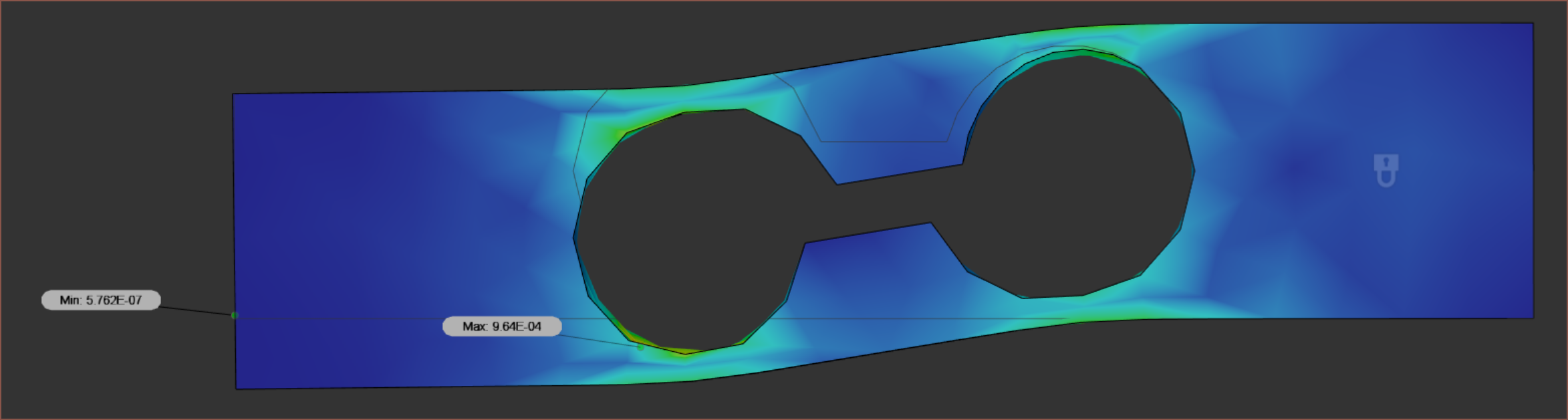
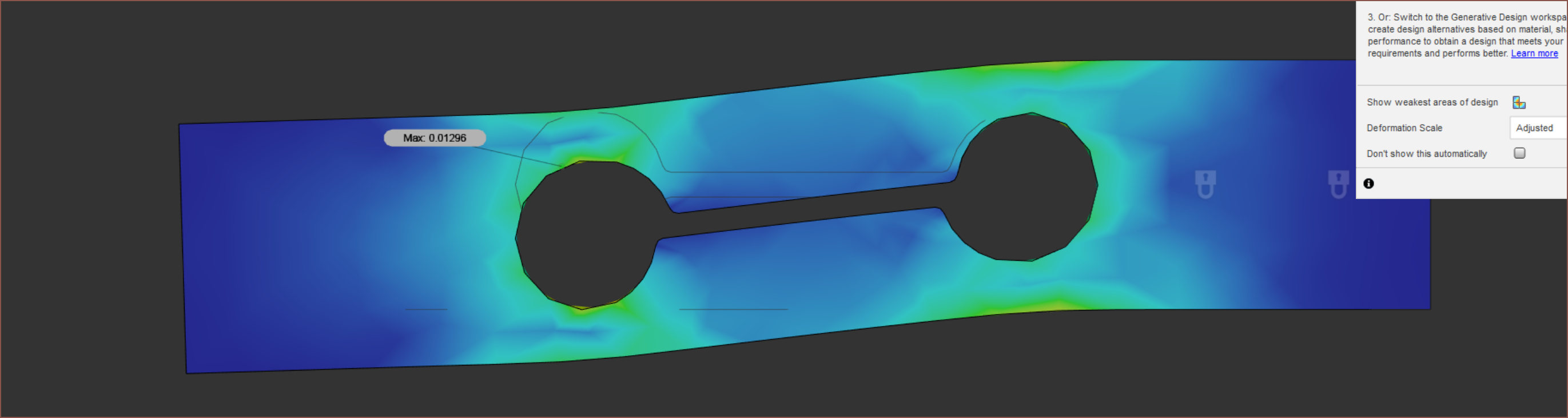
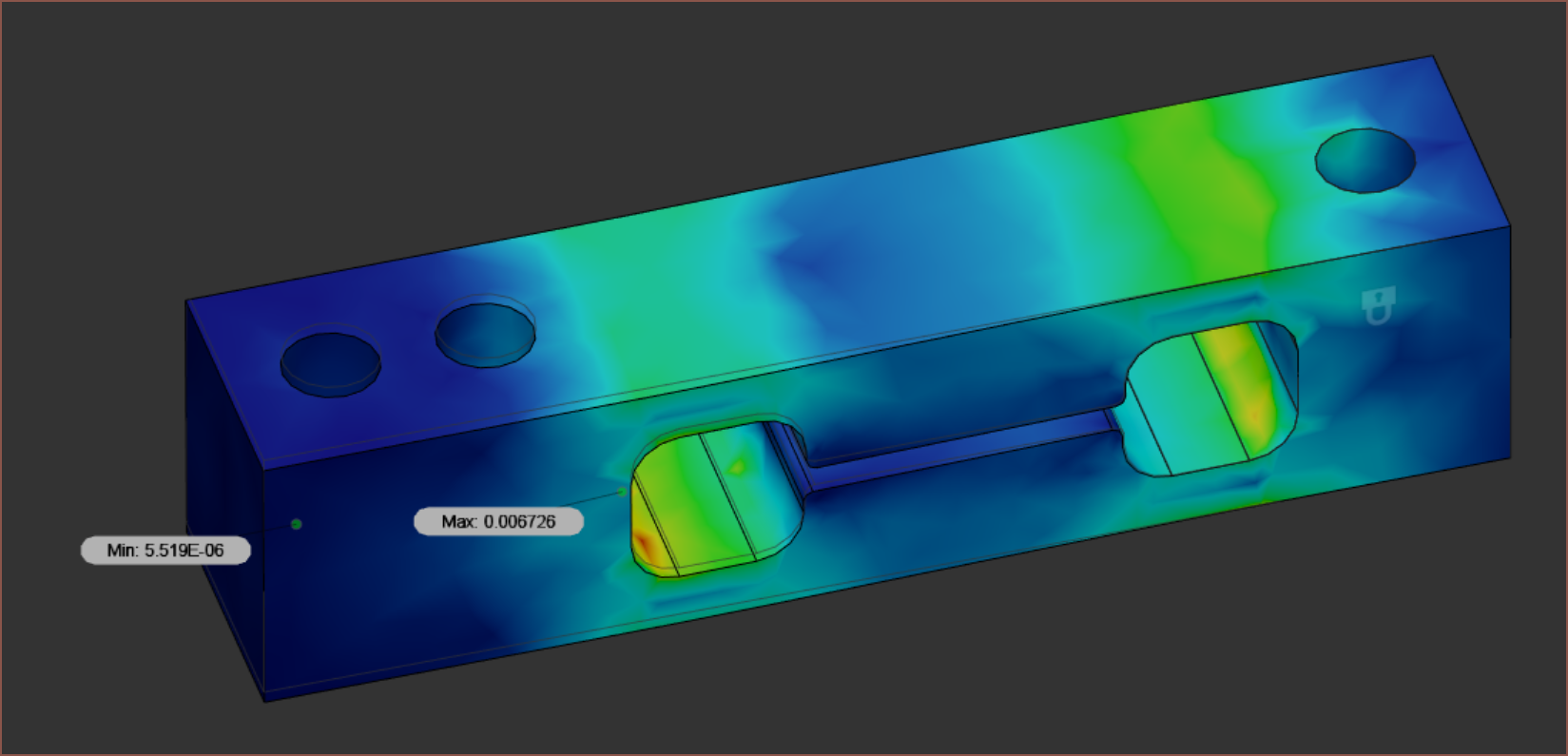
I know. What if I have the strain guages face such that the solder pads are pointing towards the ends of the beam instead of the centre?
This is just a rough estimate since there's apparently not a single strain guage CAD model on GrabCAD.Hmm still problematic on the left side.
Nope.
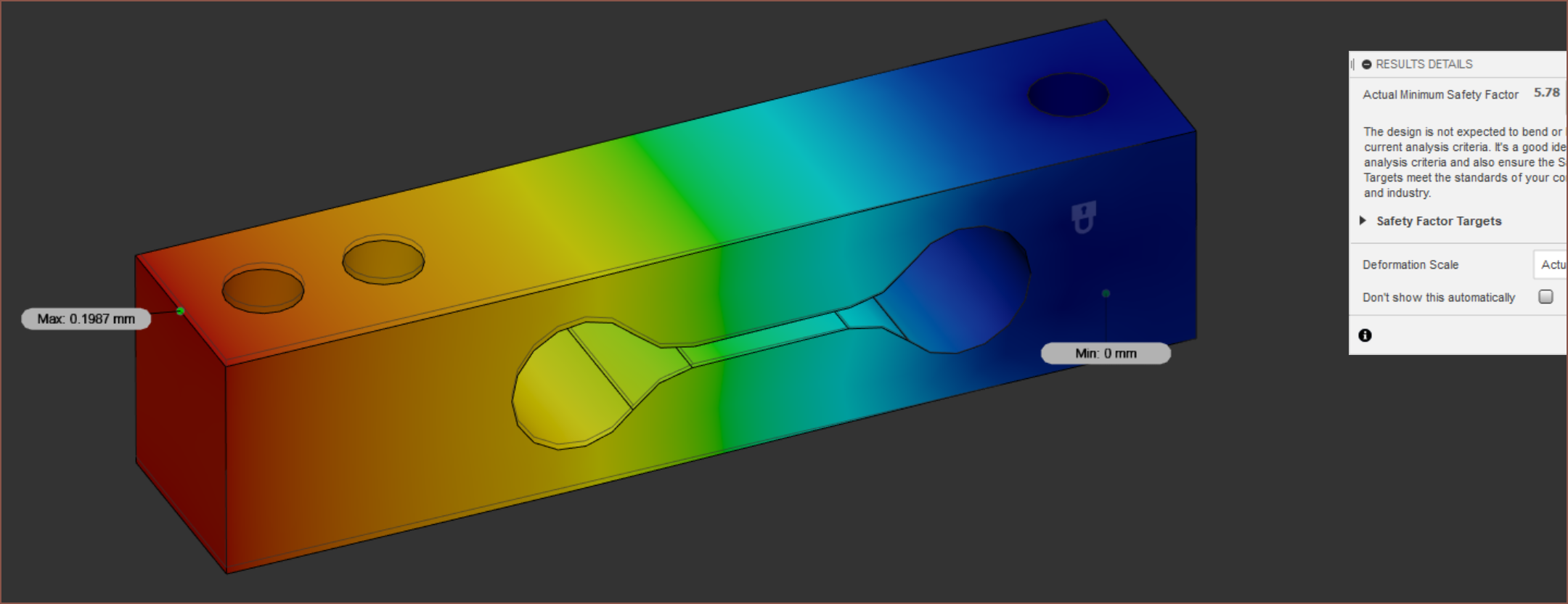
Getting there, but the safety factor is questionable.
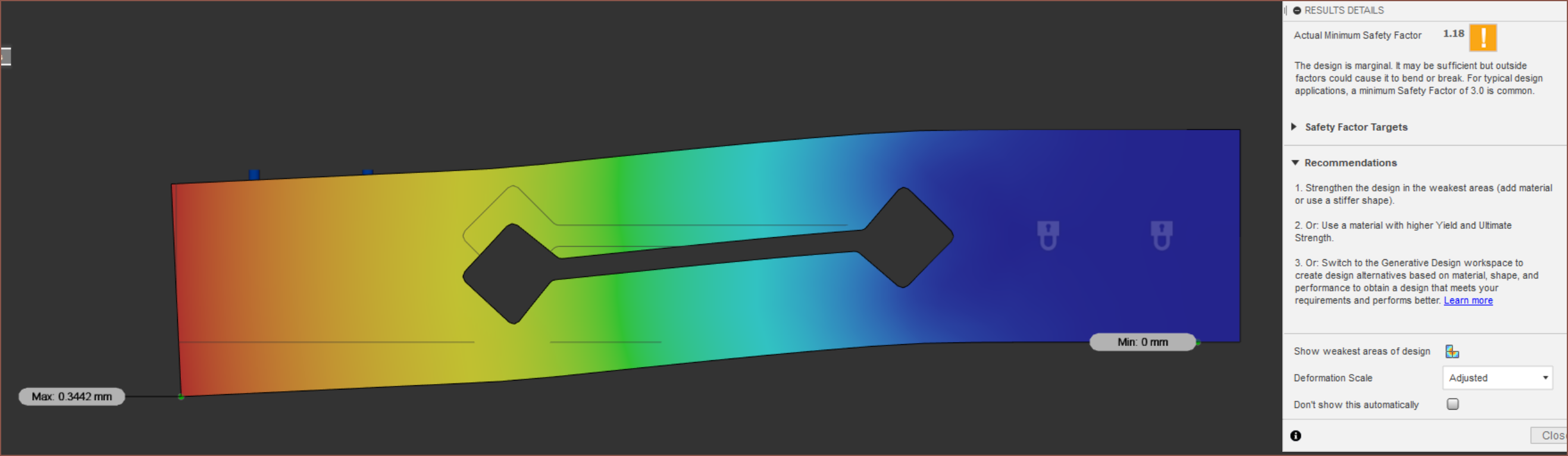
What if diamonds were used?
Pass.
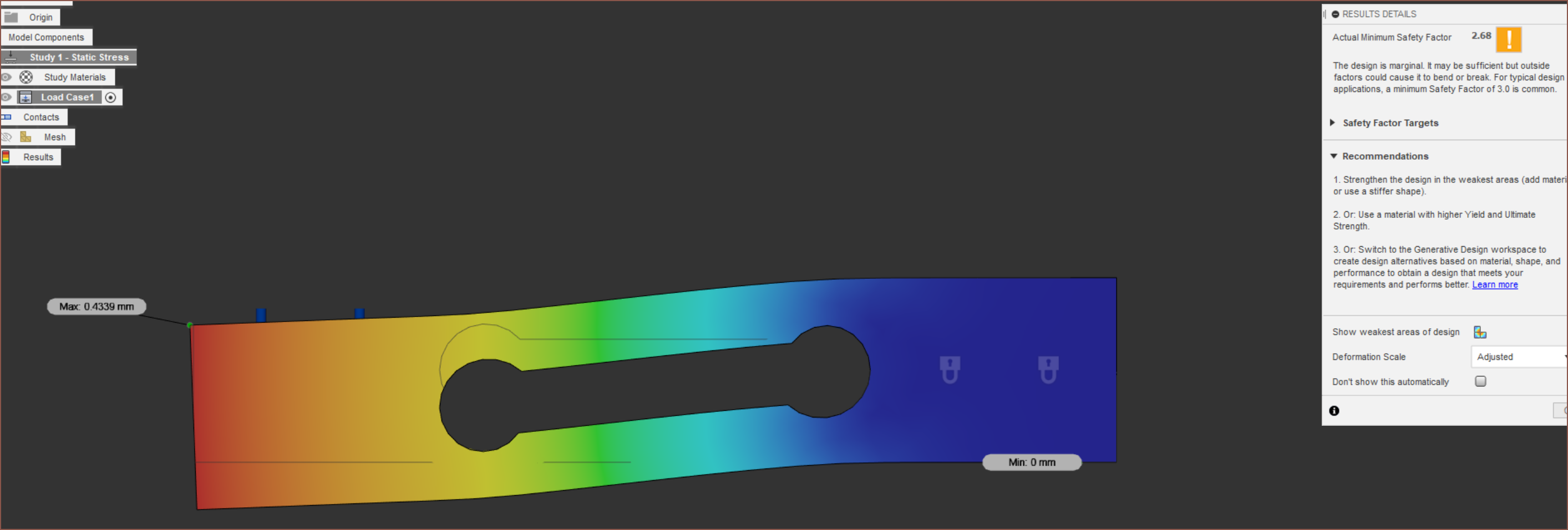
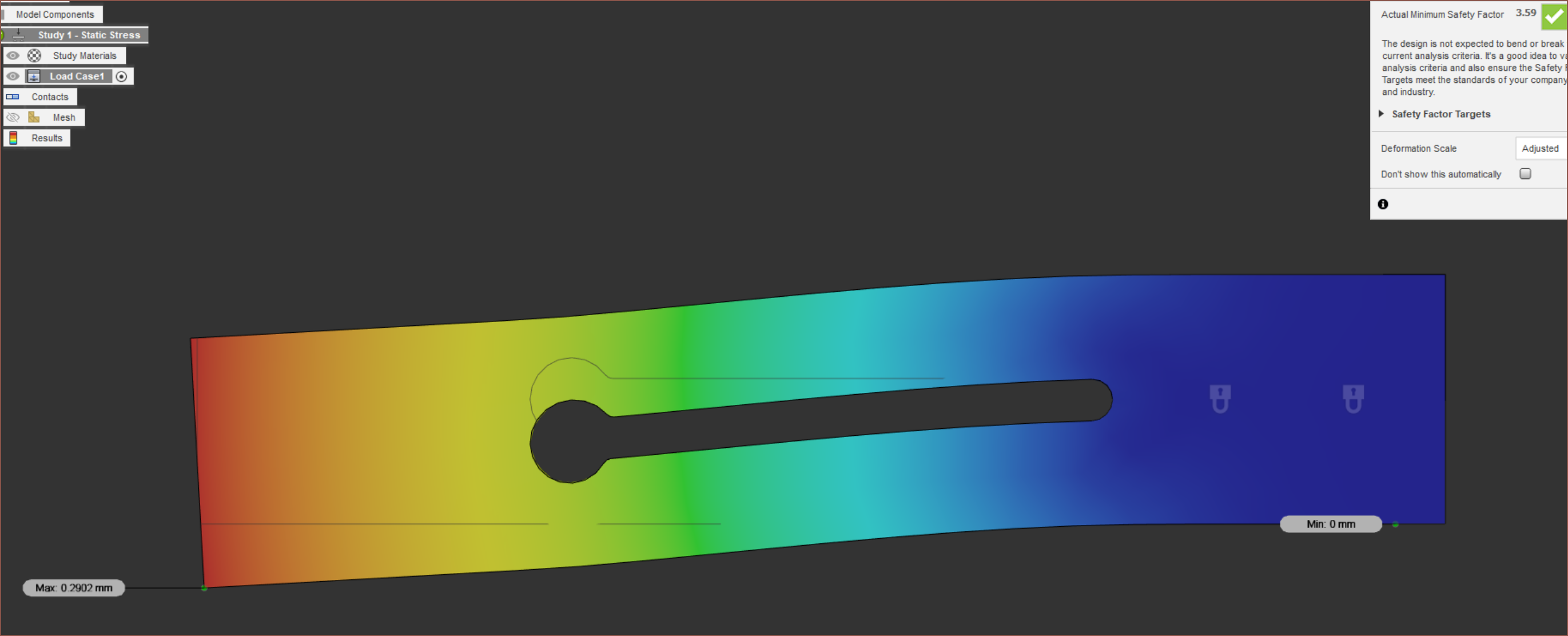
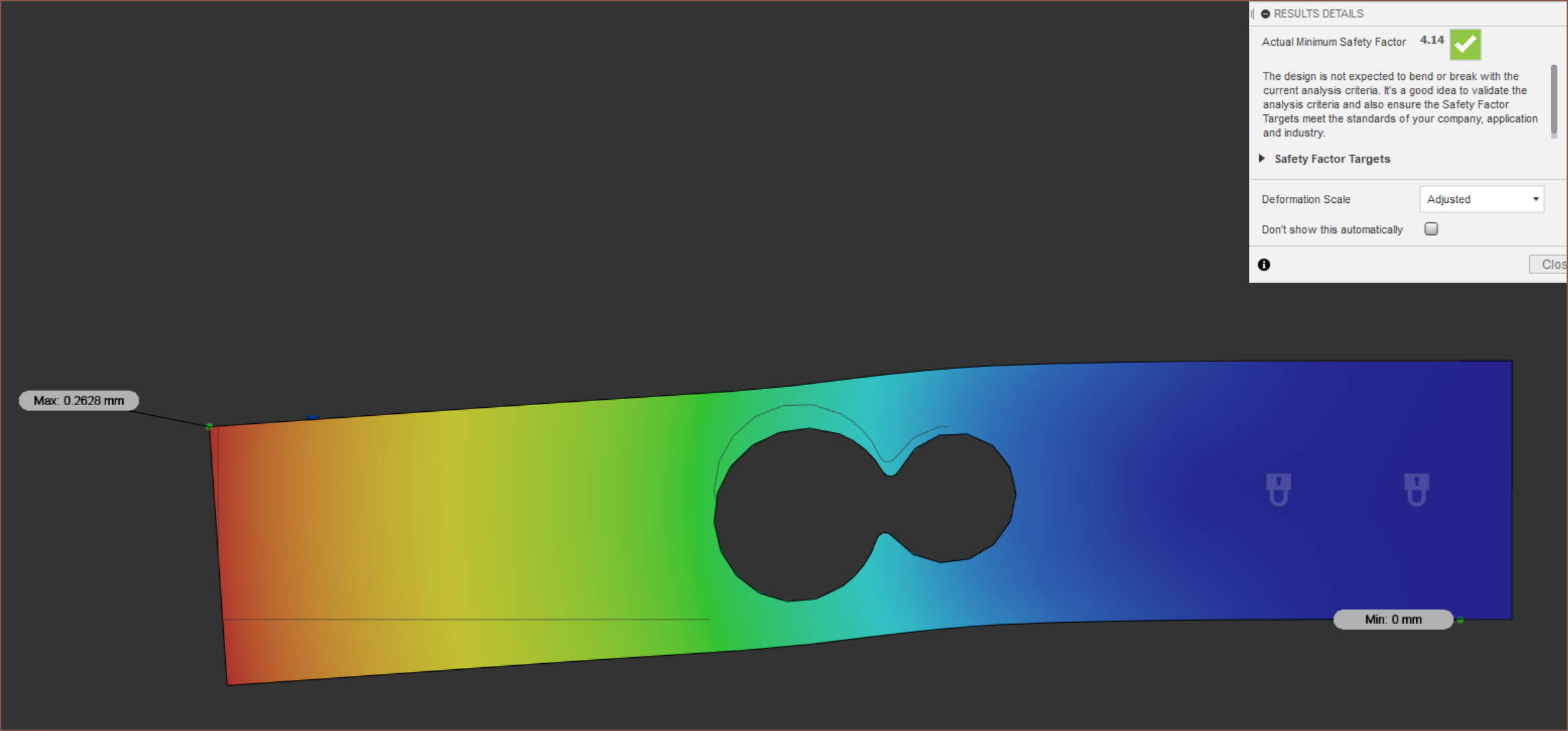
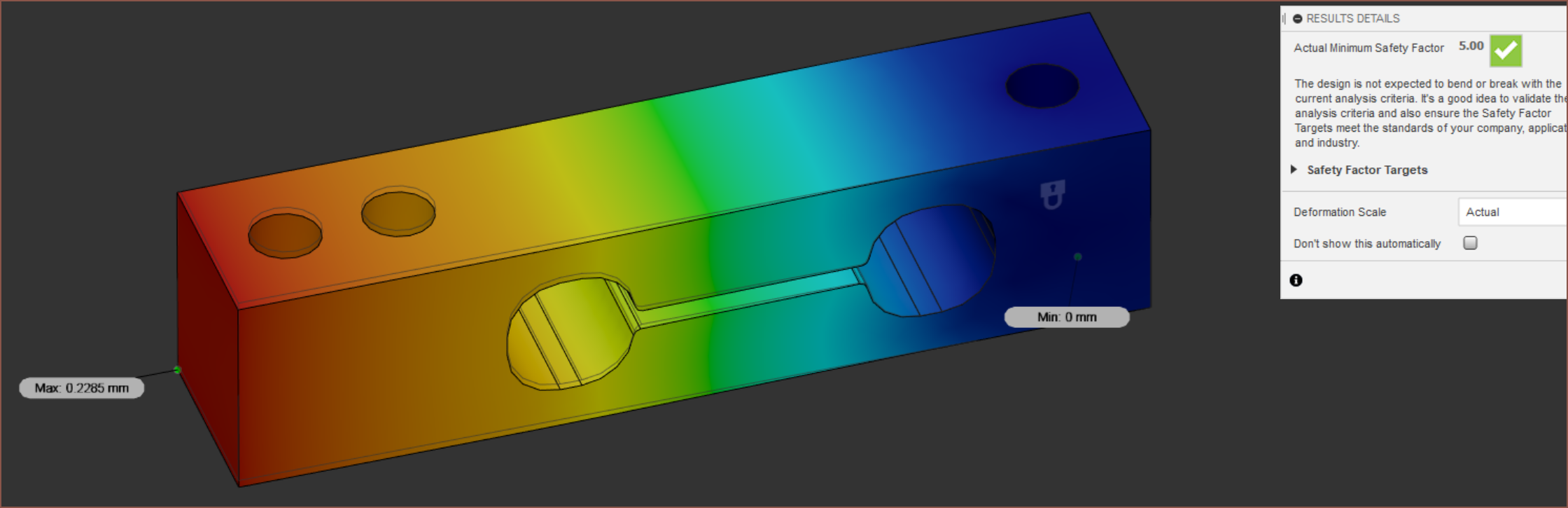
Ok 0.8mm walls on those circles gives the desired strain points. The safety factor is through the floor though, and the displacement is so bad that the "adjusted" deformation isn't that much worse than the "actual".
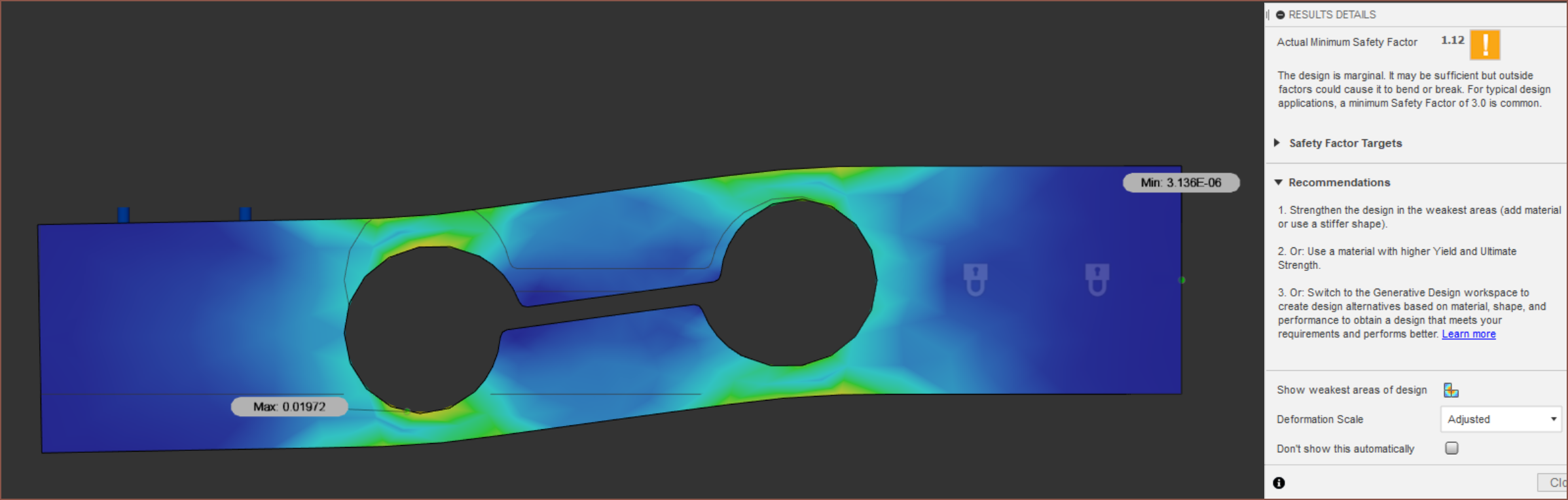
Wow ovals are really bad, relatively speaking.
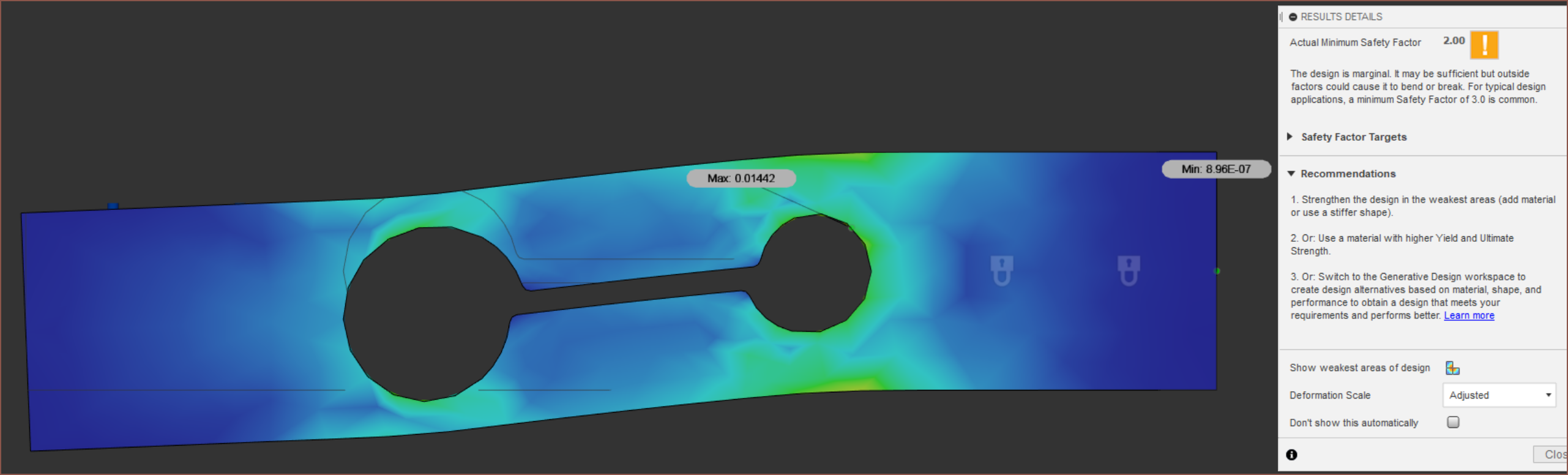
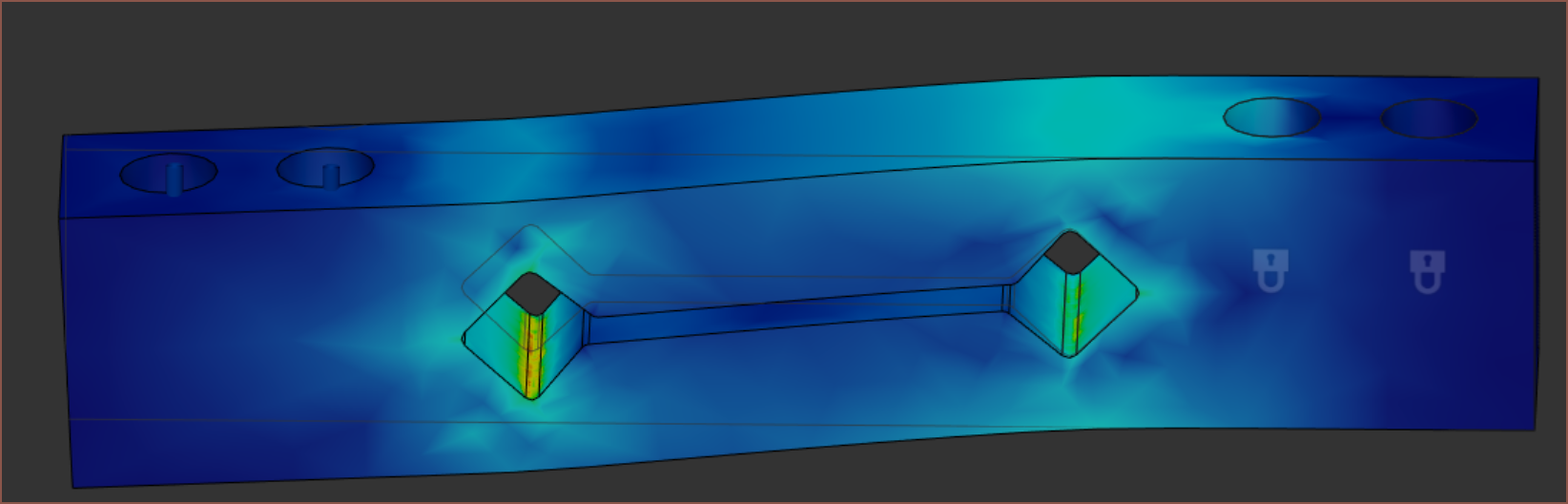
Squares might be going places though. These are 2mm squares with 1.2mm walls and 1mm fillets.
Again, remember that all these are essentially for a 1kg load. I'm expecting the max to be half that.
There's got to be more optimal designs out there on the internet.
Interesting.I'm not all that sold. The thinnest wall is 0.8mm for this simulation.
Moving on, once imported into the Tetrinsic assembly, the 3D printed guage is looking even more problematic:
Add in the wires for the strain guage and there might not be enough space for everything else. I still have the option of going down to 1 bolt per side to reclaim back some space.
Ok this is what I've got:
I've increased the thickness to 5.5mm, removed one of the two case mounting holes and now the length is 25.8mm.
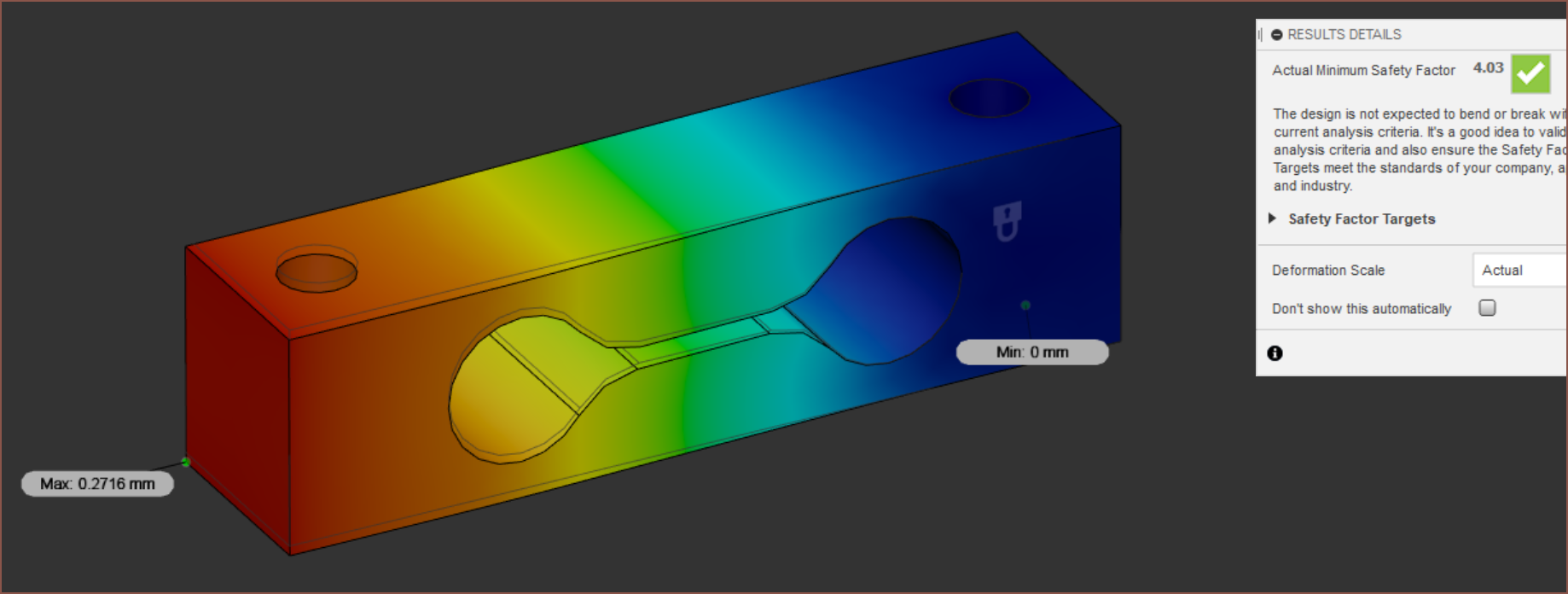
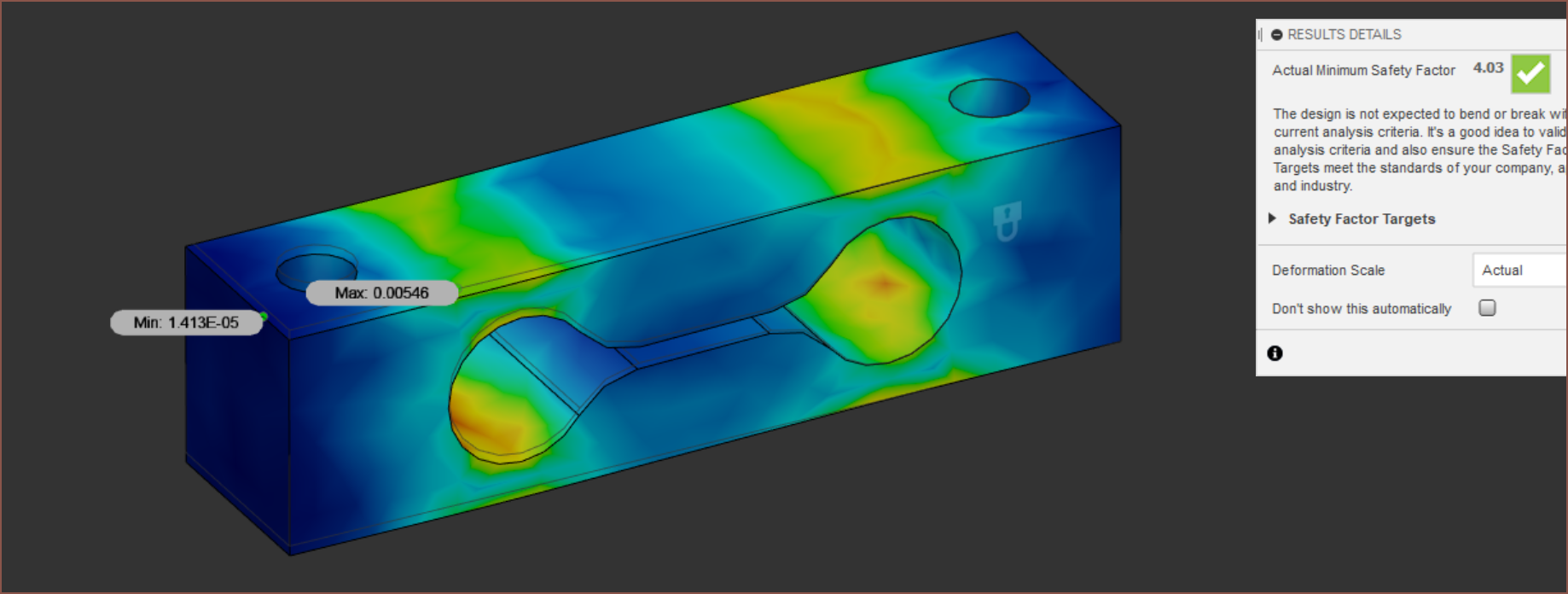
4.9N (500g) simulation:
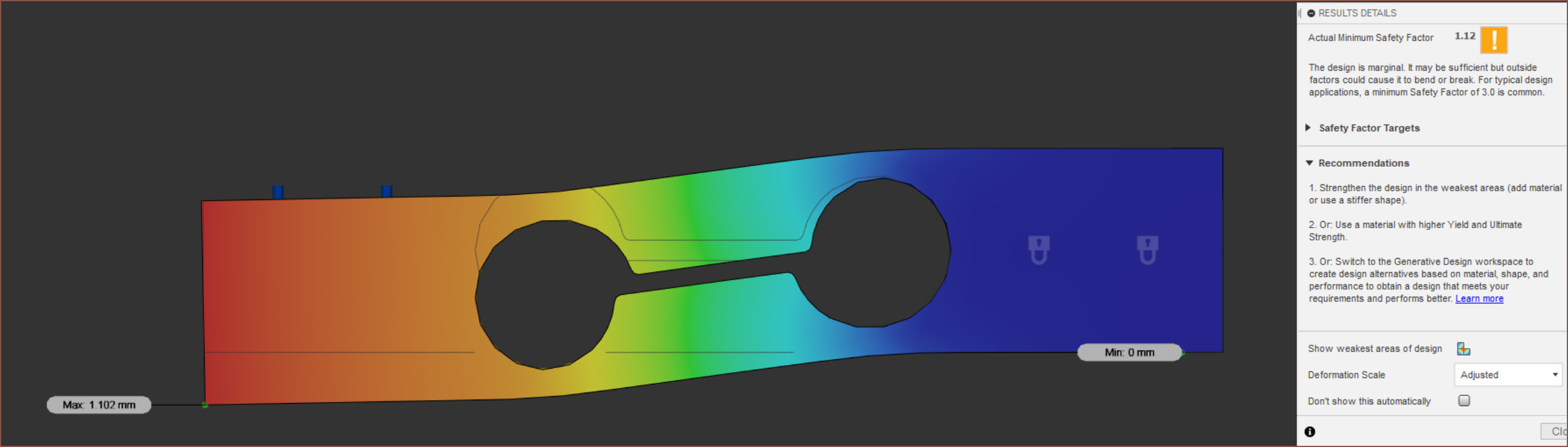
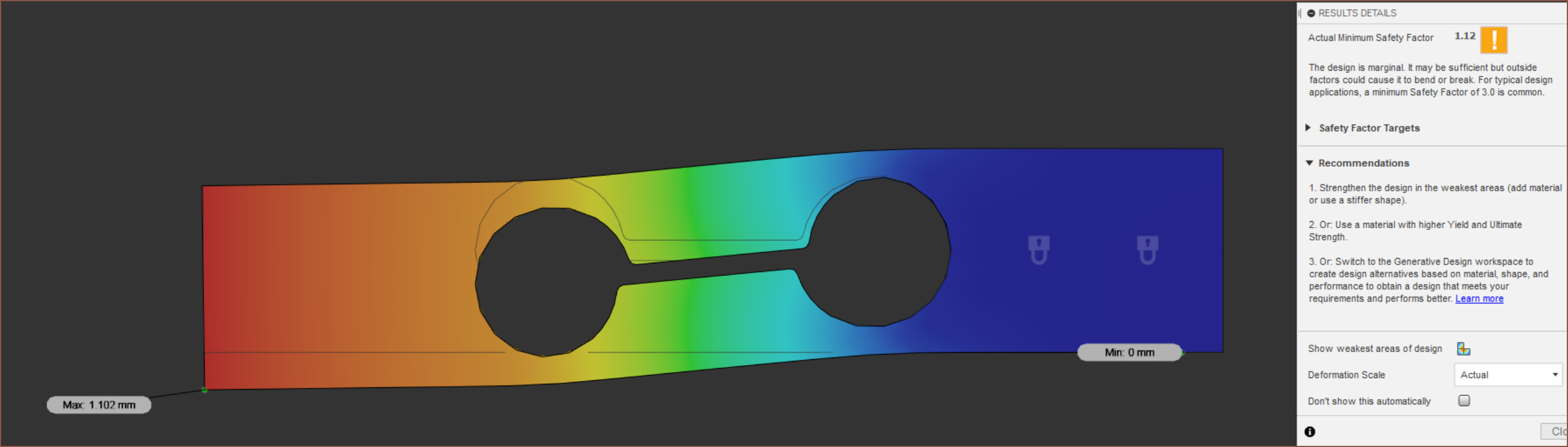
I guess this will have to do. I could always increase the fillet 1->1.5mm to see the difference.That does seem to improve things. Full circular?Hmmm. Larger internal fillets 0.2->2mm?Okay... perhaps I'd now have margain to go down to 0.9mm minimum thickness walls?The safety factor takes a hit but it does seem that the PCB mount side (the side with 2 mounting holes) has a more even strain. The length of the cell increases to 26.4mm aswell, and it's not like I even have that kind of space.I need enough space for the magnet embedded sprocket. I may be forced to go down to only 2 mounting holes like the aluminium load cell. Alternatively, the total length could be increased to accomodate.This is a 2mm overal increase.Ah. I forgot about the size of the M2 bolt caps. Adjusting the spacing and increasing the minimum load cell bone wall thickness to 1mm, I get a length of 27.6mm
[10 minutes later] Ok. I've thought about it and it seems I have a simple yet inescapable choice. The total length needs to be longer or I need to pay more for shorter strain guages.
Mng. It seems that getting 2 mounting holes is still unapologetically not happening. Lets just move on and simulate:2mm PCB, PET spacers and 2512 resistors.
Let me simplify out those cuts...
Done.
Results:
Great safety factor and max displacement, but the flex is in the wrong places.Oh my!okay...It would appear that the resistors are essentially adding stiffness in the area where I want to flex. Perhaps I need to adjust the contacts to reflect that the resistor isn't attached across the whole length and just at the solder ends.Okay alright. Not sure if it's good enough for science though. I should note that I'm expecting each of the 7+ actuation levels of Tetent to be 8g spacing, with a +/-2g crossover haptic. I'm not using this for a binary solution like Smartknob.
In any case, because of the mounting hole issue, I still haven't escaped my simple yet inescapable choice. And it's [16:30] now.
[17:00] The choice I've made is to go down to a single hole on each side and compute a solution to prevent unwanted rotations at another point in time.
Me In The Recent Past, thank you for not immediately dismissing the idea of getting an LCD back into this project again. There was an LCD when I first started designing Tetent, which got removed due to the layout. Then it came back again in the transition between Tetwin and Tetrinsic but was ultimately lost. Until now. If I can get everything to fit geometrically, this will fufill all requirements I set out to accomplish when starting #Tetent [gd0090].
It's quite interesting how most of Tetent's complexity has been absorbed into Tetrinsic. I can imagine some alternate dimension where TTGo or Waveshare made this thing instead and creating Tetent would've been super easy and barely an inconvinience. Unfortunately, Tetrinsic isn't some off-the-shelf part that exists here.
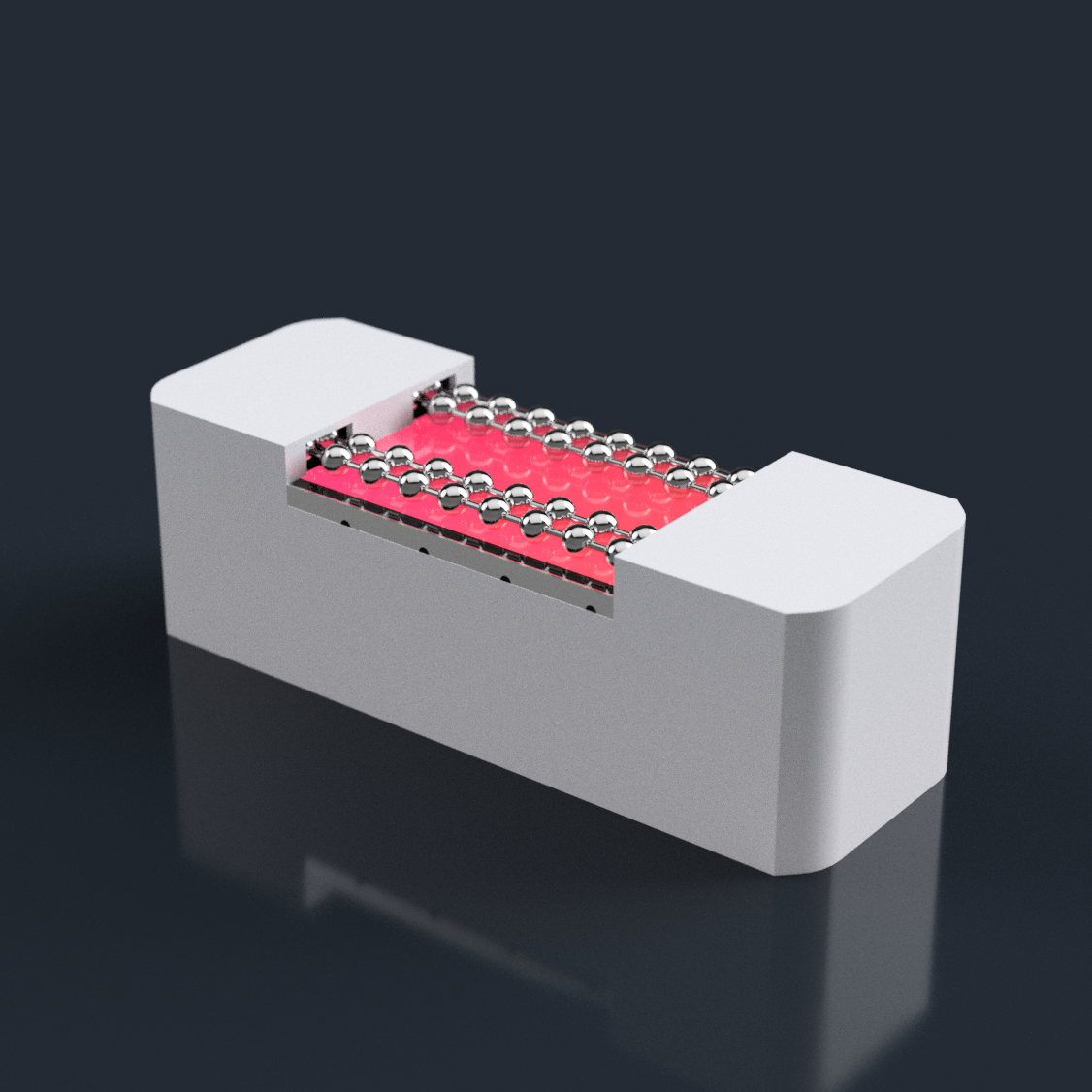
I've actually been thinking of using something like black or copper ball chain, but now seeing the stainless steel variant in this render, I'm more than fine with sticking with it. Speaking of the render, the white part is just a standalone enclosure "serving suggestion".
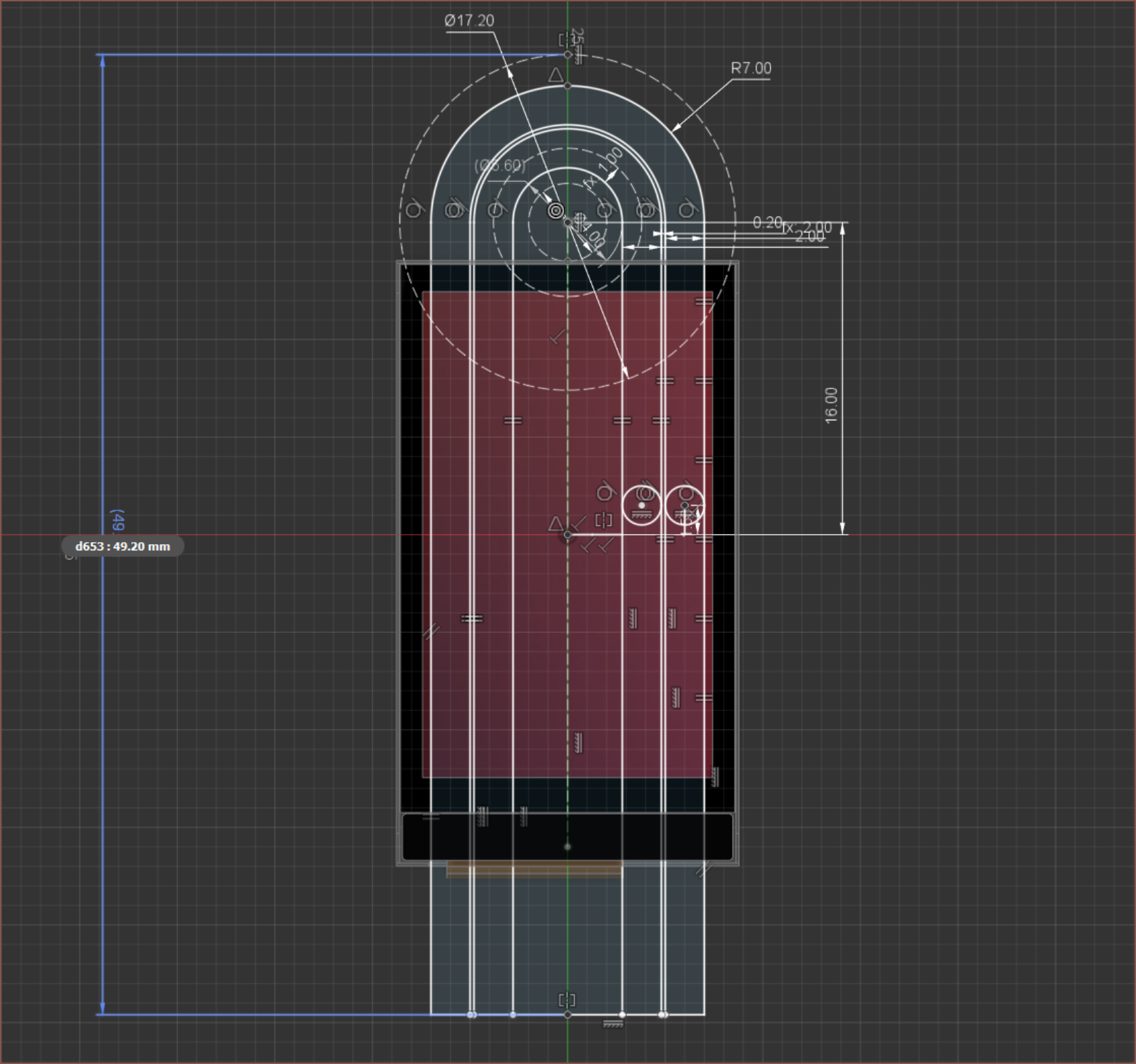
This is what the top-down path of the planning sketch looks like:
The concerns I have is that the total length is now 50mm and the distance between the bottom edge of the screen and the bottom edge is around 10mm. Both concerns stem from #Tetent Timespy [gd0136]. I also expect that I'd need to cover the screen with a protector to prevent damage during use.
Oh and I've only got 5.6mm of thickness for this singular load cell. It does look like I've got a decent amount of length to implement it (<32mm), as well as a generous amount of space for the PCB.
Exciting. I think I can delete the belt version from the Fusion360 file and go all-in on this new version.
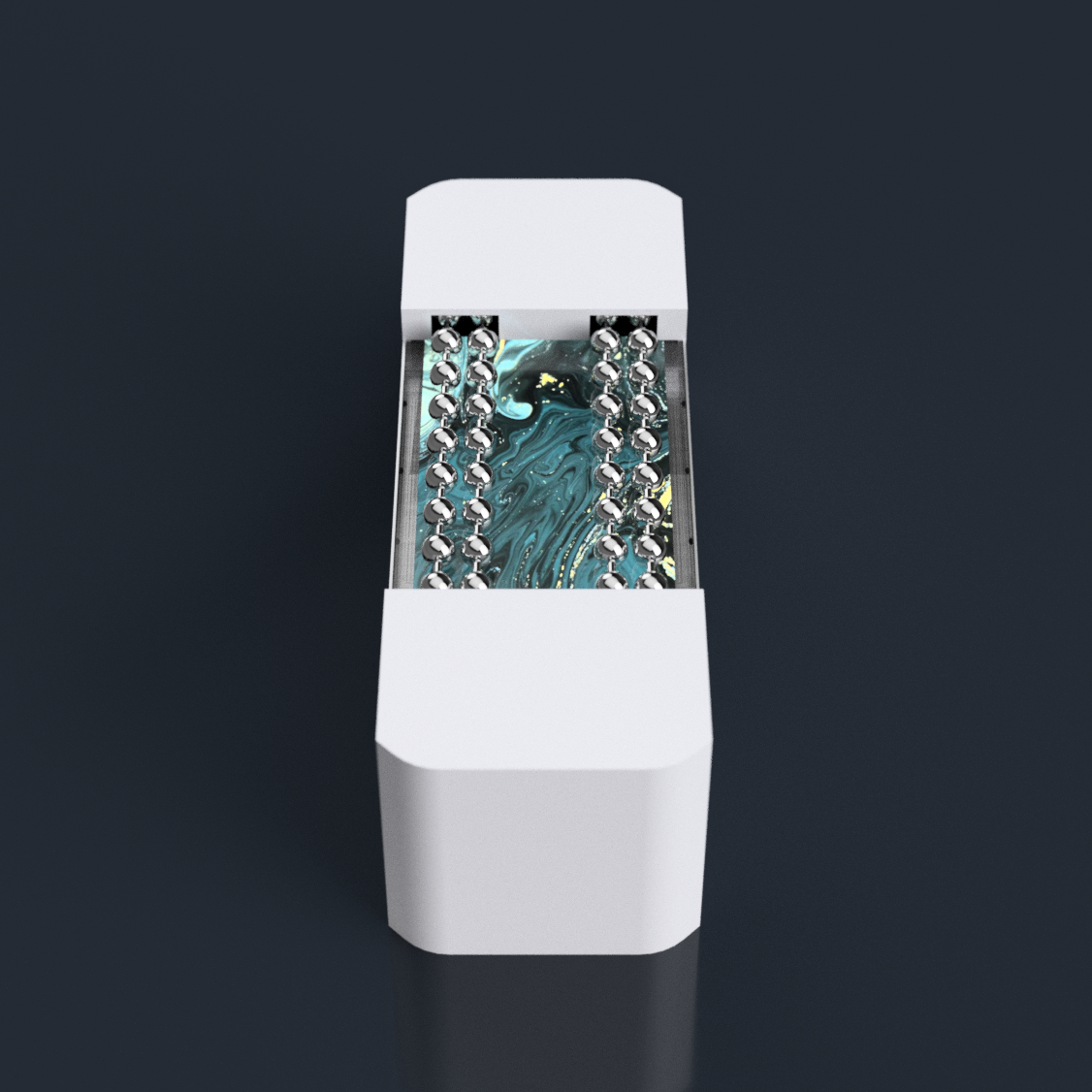
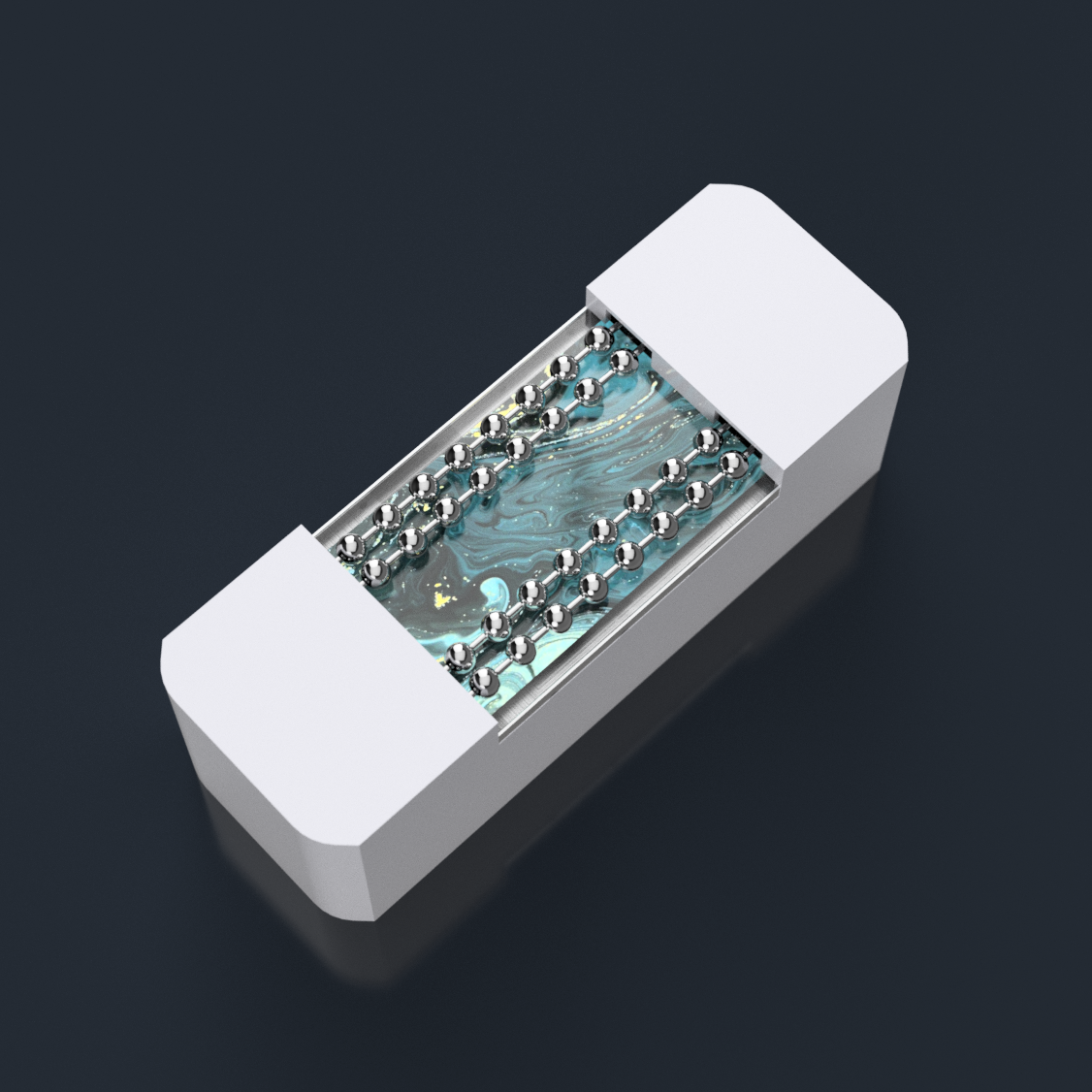
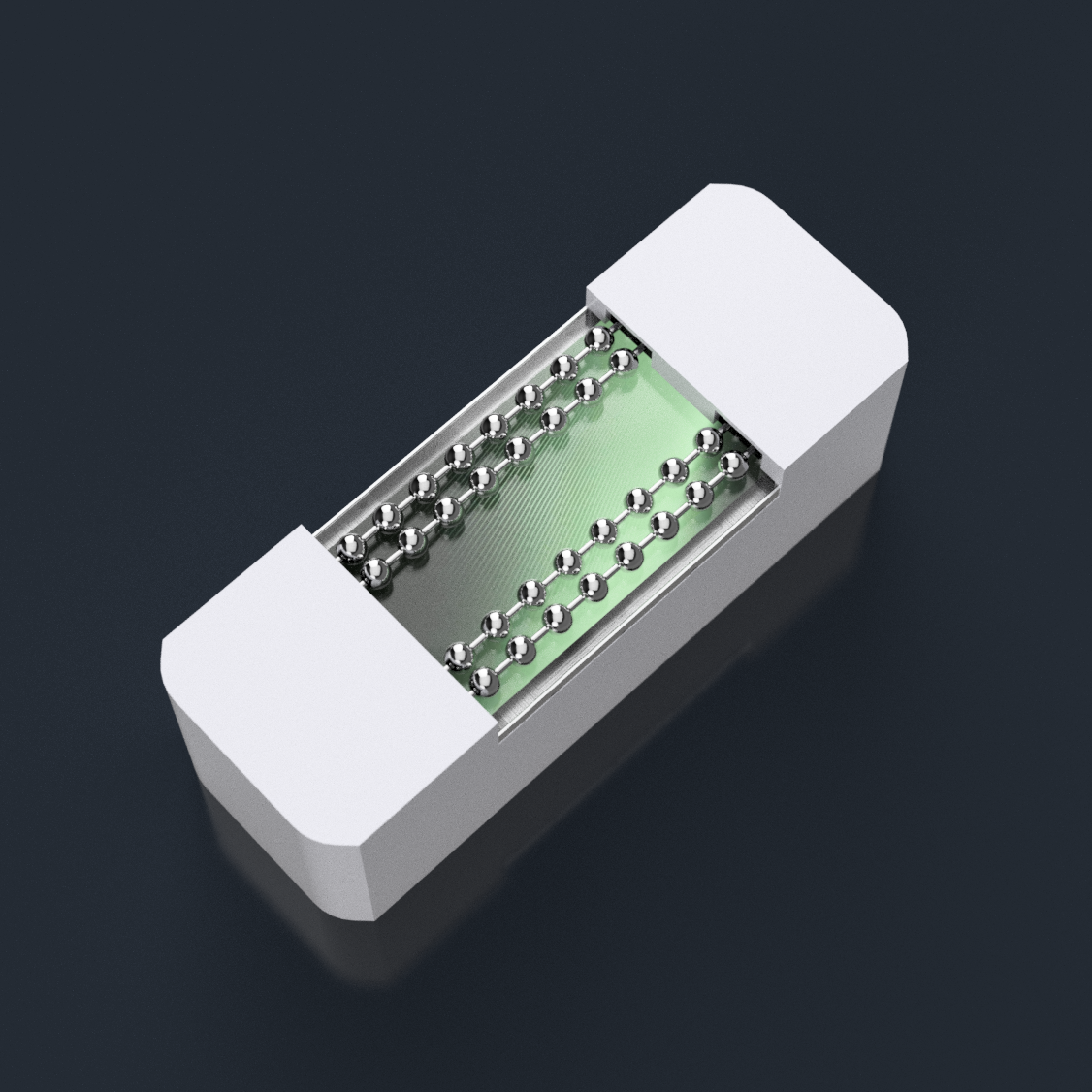
More Renders
This is the first texture I had in mind, but thought it looked desaturated.This is a glitter infused green liquid.I think this is a macro shot of something green. It's the shade of green I had in mind when looking for the glitter liquid above. I like how it's got a bit of a Windows/Zune/Xbox 360 vibe.
I'm thinking of only designing for the TFT variant of Tetrinsic 2.0 and only doing the COB LED strips (one on each side) either if the need arises or it's actually super easy, barely an inconvinience to implement.
For PWM driving the backlight, it sounds like an N-Channel MOSFET is what I'm looking for.
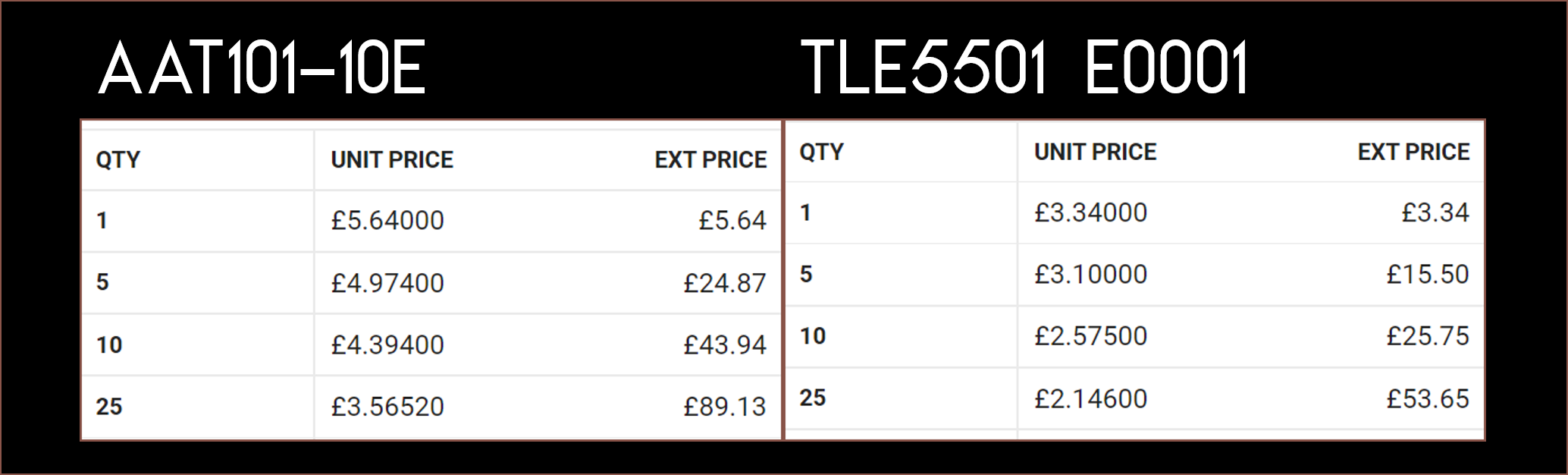
Cheaper angle sensor found
Both chips are full-bridge sensors. The TLE5501 is an 8SOP chip though. Hopefully though, I'd have enough PCB space.
Flash
I searched on Google what the general consensus was for picking RAM and FLASH values for microcontrollers, and it was recommended to pick the highest possible when regarding a hobbyist project (with the option of scaling down later).
With that in mind, I'm going to use a 16MB FLASH chip. Searching around AliExpress, all the RP2040s use a W25Q chip. I'll likely use the smaller package option:
Conclusion
Speaking of AliExpress RP2040 boards, it seems that I just need some chips and passives to make a working solution when looking at this board:I think I have enough data that I can start modelling a solution.
Yesterday, I've mostly been thinking about how I'm going to attach the motor to the rest of the build, and how to go about a 3D printed load cell.
Motor Updates
For starters, I'm thinking of cutting off 2 of the 3 tabs and M2.5 tapping the remaning one. I also was able to easily open up the motor and thread the ribbon cable back through the hole and through the gap between the rotor and stator. The stator electronics seems pretty attached in there, so it doesn't seem like I could 3D print a custom stator mount, forgoing the aluminium one entirely.
Load Cell Thoughts
I still haven't thought too much about the load cell yet, but I know I've got to make my own because the minature ones on AliExpress are like £30+ for some reason when the large 1kg ones are maybe £1.50. Doesn't seem like I'd even be able to cut it down to size.
LED or LCD?
I was planning to have a left and right variant of Tetrinsic to give me the most amount of space for this mystery load cell, but then I started thinking "Should I have this thing (the ball chain) LED backlit?" and that soon turned into "Should I use a single daylight white COB LED under a thin, printed sheet, or should I opt for a IPS display where the ball chain slides across its surface?".
I've found both a suitable LED strip and LCD screen, but I couldn't find an addressable LED that would likely fit.
Obviously the screen option is going to be more expensive and more complicated to implement. I'm just wondering if those drawbacks are still worth an implementation. The aesthetic sells, even if one is unlikely to actually see the Tetrinsics in actual use with Tetent.
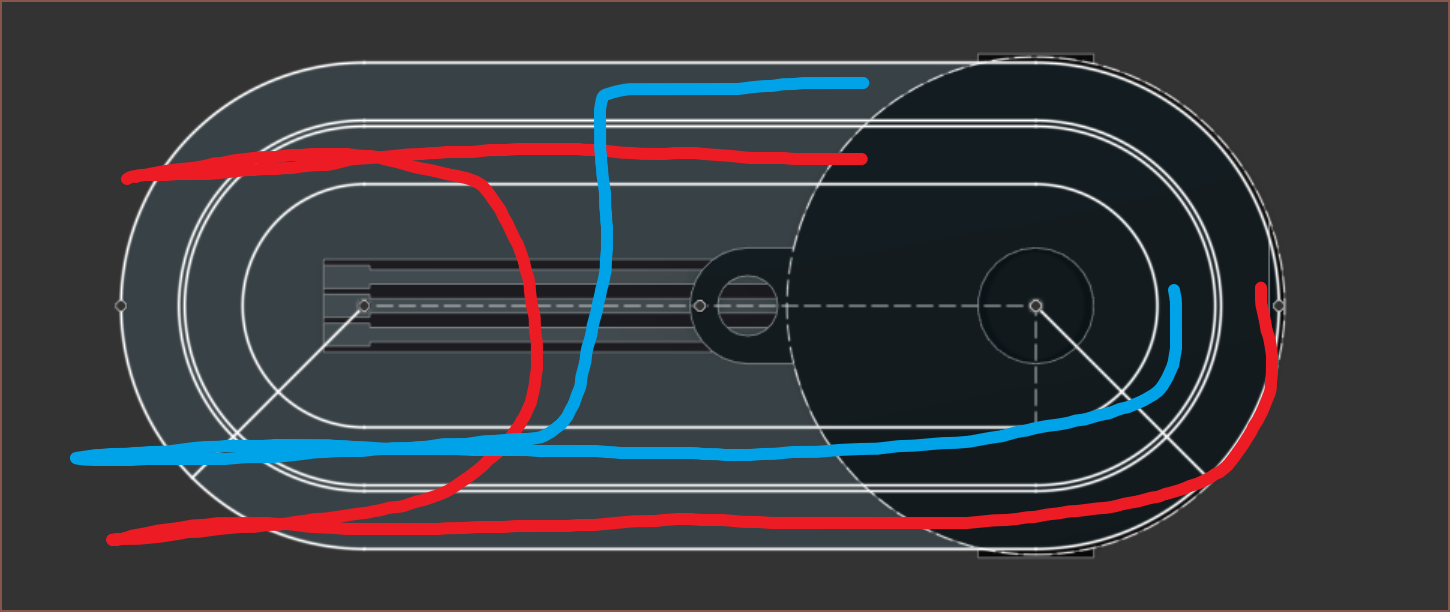
I can see a possible option for the screen version. The screen is 17.6mm, so it covers the entire top section. This means that I wouldn't be able to screw a bolt into the single motor tab and instead would have to do something like a grub screw mount on the cylindrical face of the stator. Half of the initial route, shown in blue, and the possible route, shown in red is shown below.
The red path would mean that specific left and right sides don't have to be printed (like the current belt design), but I'd have less mounting space for the load cell.
The LED strip would be more adjustable, taking advantage of the ball chain. Unlike belt loops, I wouldn't have to specifically buy different lengths to make a longer Tetrinsic. Instead, I should be able to just take a length of ball chain and DIY it into a loop without much of a trace. The COB led strip length can also be changed for different applications unlike the display which is fixed at 24.9mm of active area.
Me2: But come on! Think of the aesthetic! And most of r/mechanicalkeyboards is, generally speaking, the same layout with an artistic choice in keycap colours.
I've got an idea. I could design for the screen, then make a 3D printed part that takes an LED (or nothing) instead. Then one could choose between no / solid colour / animated backlighting. Playing all sides, so that the solution always comes out on top.
I'm likely going to need more pins then.
Microcontroller Search
The next M032 up looks decent. 2X the RAM and FLASH for a larger package. Only pennies more.
If I just look into any USB enabled, 32 bit microcontroller, an option is this tiny BGA:This might not be an option though since routing the pins out might be tough on 2 layers, and there's only 3 more IO pins than the M032 I'm using now. That's also an entire other datasheet that I have to read through.This one sounds really good.SIX POUNDS?! Outto stock?! What?? What happened to the 385?Huh? Is this from some "Marketplace" thing?No it looks... perfectly fine... so then why...? Do they just not have Amazon's feature that automatically shows the in-stock listing, or perhaps they deliberately show the higher cost option?
Oh right yes I should also mention why I've completely skipped over the RP2040. Dual core, loads of RAM, 30 I/O pins oh and probably great software support... where's the issue?
The memory chip is external and there's only 4 analog pins. I think that I only need 4 actually, so this might not be a problem. I've got more worry about the size of this external flash; I predict that I'd have more PCB space but I don't know if I'd have enough for a 7x7 chip and some flash storage. Additionaly, the absolute max rating is 3.63V and the LDO source is 3.45V nominally IIRC (3.3V rated, 3.6V abs max). The LCD is also 3.3V, so perhaps I'd have to take the digital voltage down anyway, but I'll try it and spin up a new PCB if it fails.
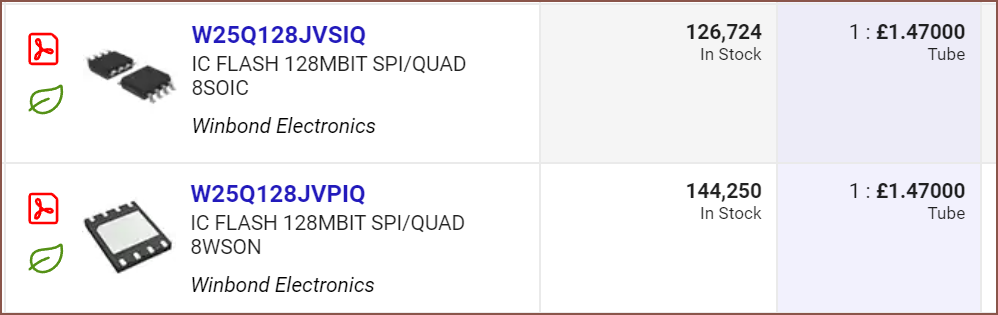
Then again, I should look into it though since it supports up to 16 megabytes of FLASH (which, for a microcontroller, sounds like A LOT). The AliExpress boards I found were like £2 or less with 16MB, so it can't be that expensive. I'm assuming it's the relatively large looking 8-pin chip.
Wow. They're all in this standard 8SOP package and really cheap. I don't think I'd ever have to worry about compile space with 1 M...bit? Wait has memory been specified in bits this entire time? Oh so is that why there's an "x 8" or "x 16" or something for these microcontroller specs?Ahhhh okay okay. Is there anything else specific I should be on the lookout for?Ahhhh mmmmnnn.
This looks like a good one. No idea why 10pcs costs slightly more than 1, but at 34p per each I'll look the other way.
That would put the total for the RP2040 at £1.14 for 256K of RAM and 512K of FLASH, which sounds decent actually. More than decent; isn't the RP2040 undercutting the entire (Digikey) market in almost every way in every metric other than available PCB surface area requirements???
If I can actually fit that 8-pin FLASH, then I could get access to a seemingly easy microcontroller to run Tetrinsic on. I'd have loads of memory, an entire core I could dedicate specifically for the screen, and likely a magnitude more internet documentation than Nuvoton's M032 line.
Conclusion + Concerns
It's looking more and more like mining a solution for a "Tetrinsic 2.0 even though 1.0 hasn't even happened yet" will bring forth a slew of benefits but be more expensive as a result. It's certainly a harder solution to mentally process, but the benefits would be:
Higher quality material in contact with skin
stainless steel instead of rubber
Better aesthetic
ball-chain looks more elegant and less mechanical/technical than a rubber belt
potential option for LED or LCD backlighting
Potentially cheaper PCB and easier to program microcontroller
Potentailly less friction / resistance
Smaller size
Potentially better pressure sensitivity if I'm able to integrate a full-bridge load cell instead of the half-bridge solution I currently have.
The drawbacks would be:
Potentially higher overall cost, especially factoring in the ball chain splicer
Potentially noisier operation
Potential for play in the ball-chain
Higher build complexity
Things I'll have to further look into:
Load cell space
Available pins for RP2040 to see if I have enough and of the right kind.
Amount of extra complexity in PWM controlling 5V LED when I have 3.3V logic.
 kelvinA
kelvinA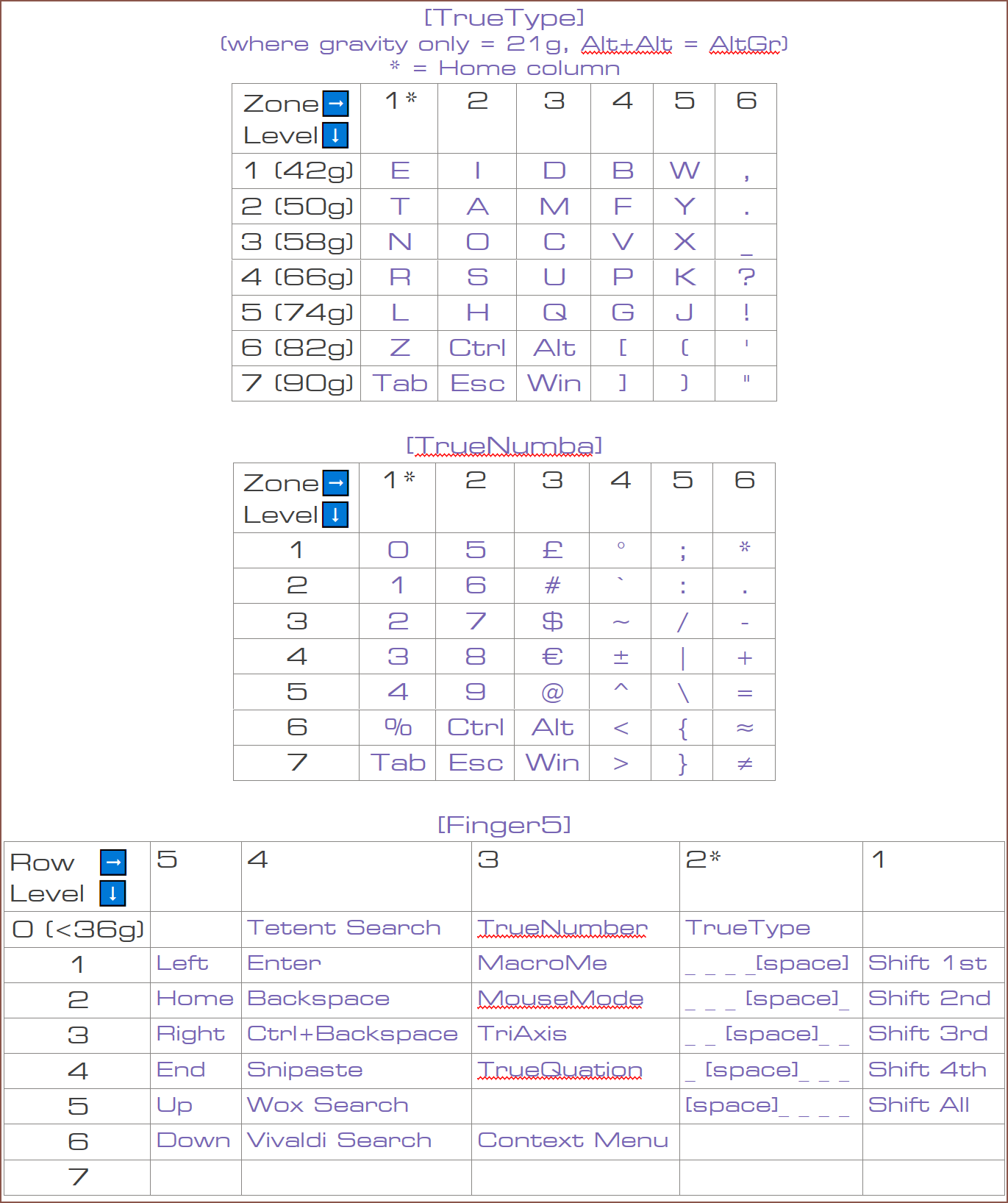 Without an actual device to test out the layout, it's somewhat difficult to get a full layout made. Additionally, since I haven't used many mathematic applications I still haven't started on TrueQuation.
Without an actual device to test out the layout, it's somewhat difficult to get a full layout made. Additionally, since I haven't used many mathematic applications I still haven't started on TrueQuation. 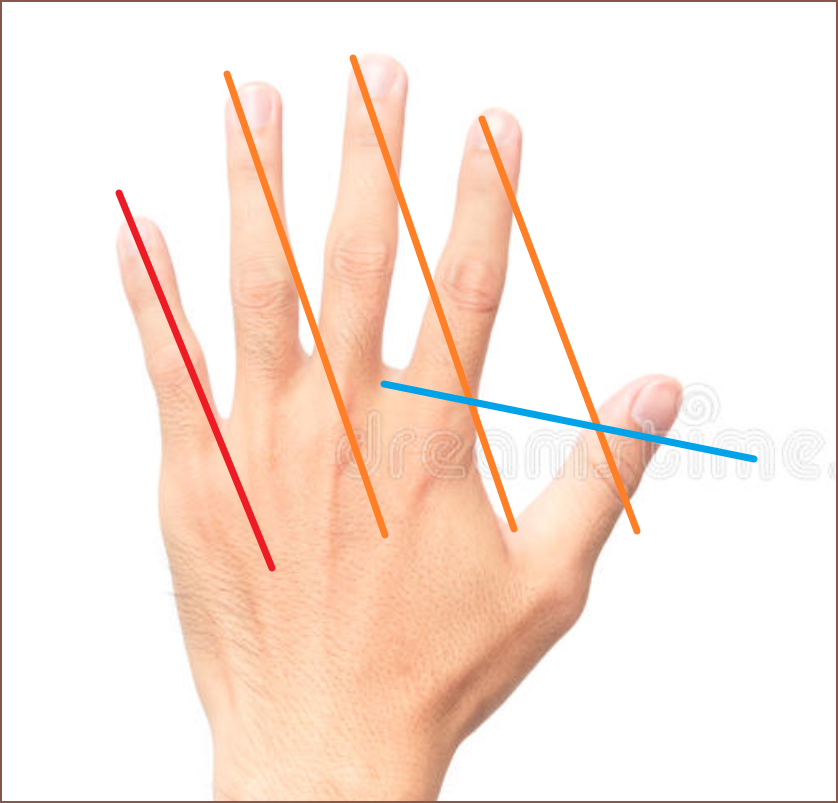
 It's a peek print on a metal ball chain! And, conveniently enough, it's the size I've been using for the current Tetrinsic redesign. Double conveniently enough, it fits beautifully into the channel in my combination square:
It's a peek print on a metal ball chain! And, conveniently enough, it's the size I've been using for the current Tetrinsic redesign. Double conveniently enough, it fits beautifully into the channel in my combination square: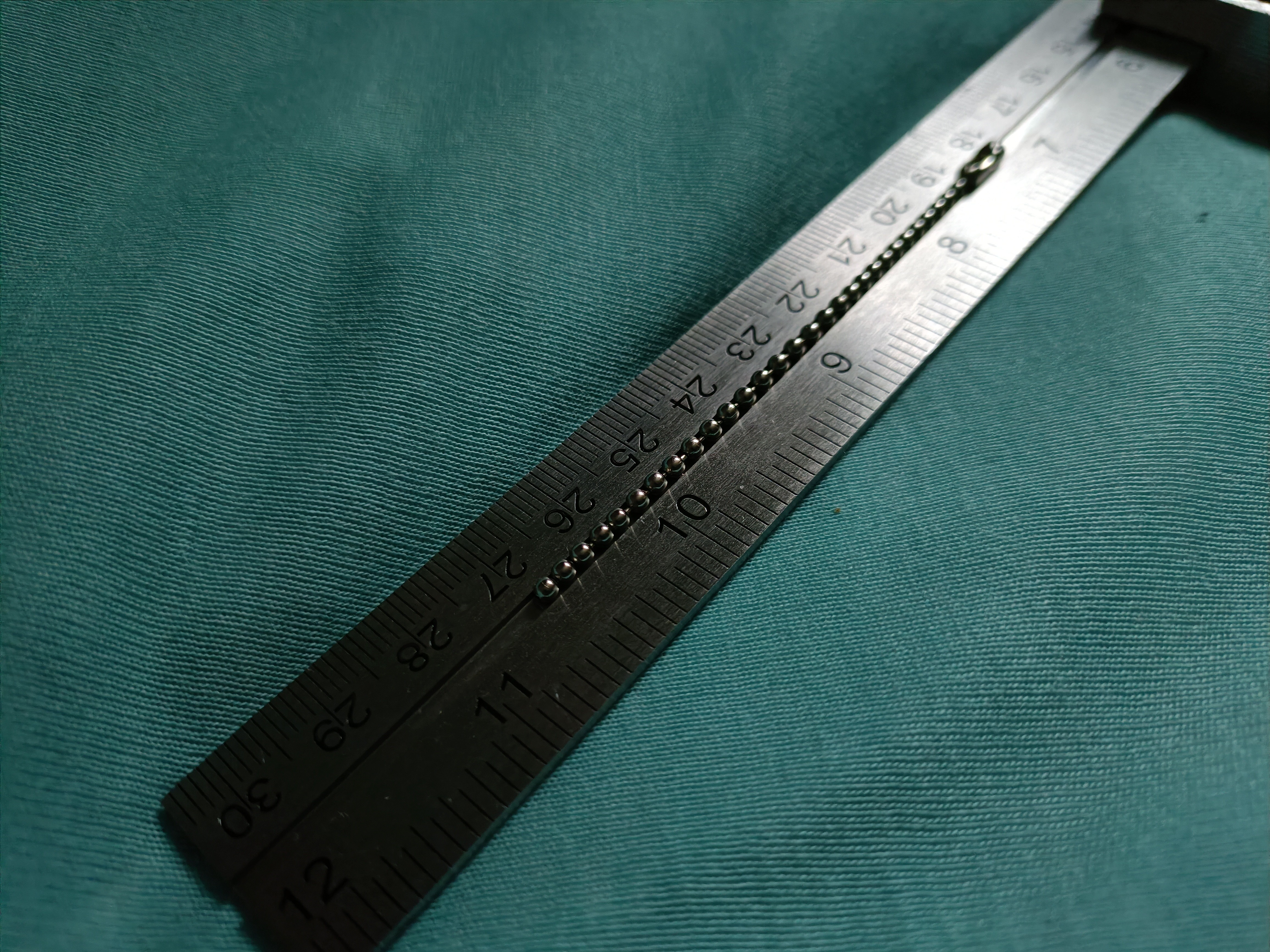 This means that I was actually able to try and feel what a 1-ball-track Tetrinsic would feel like.
This means that I was actually able to try and feel what a 1-ball-track Tetrinsic would feel like.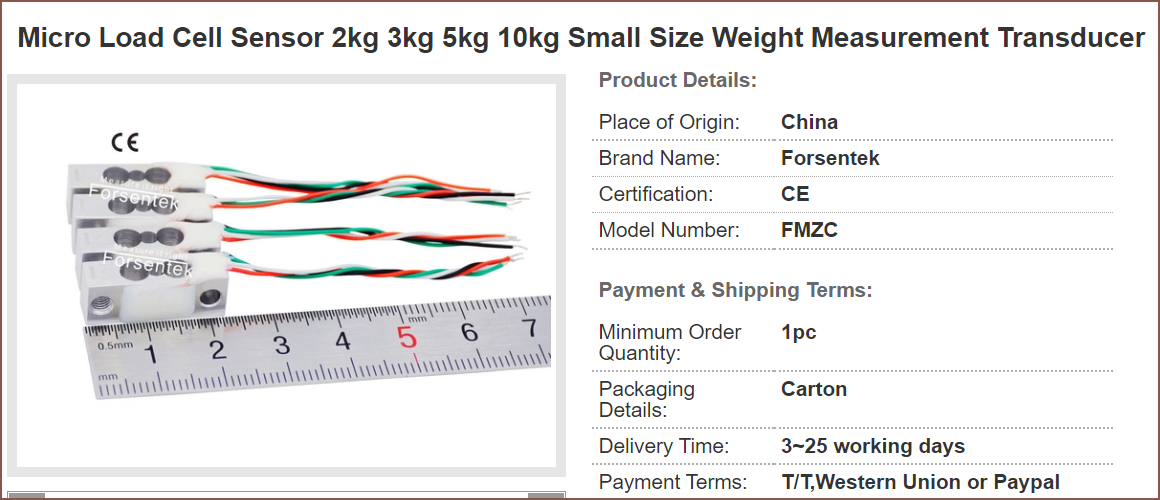
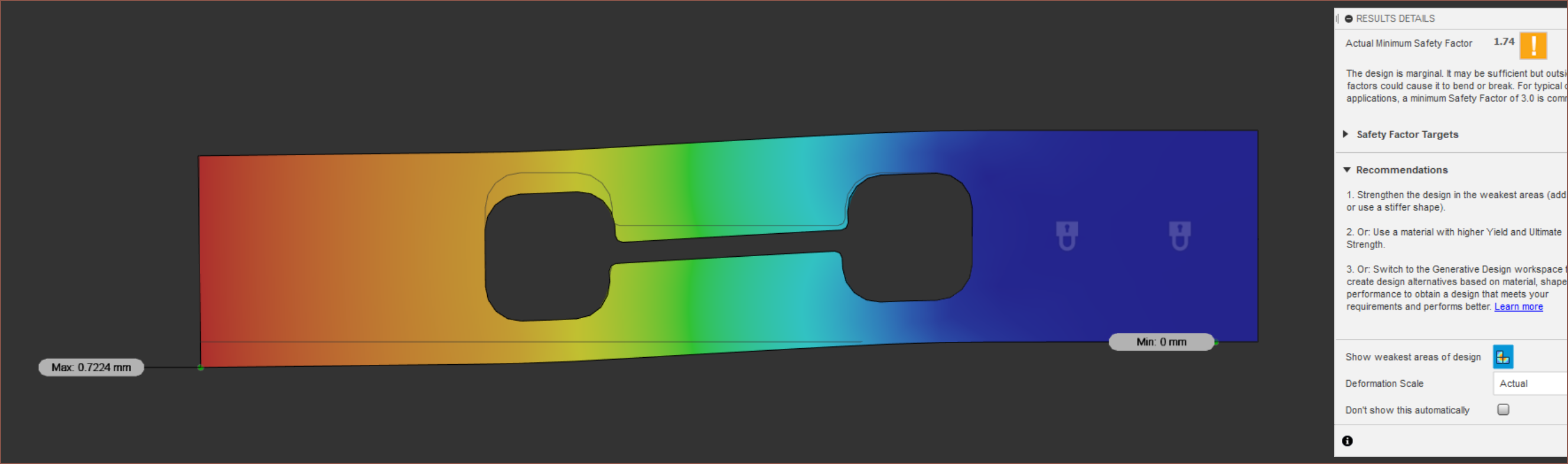
 First attempt was with a 2mm slot. The aluminium cell had 6.3 safety factor and I think this one was somewhere in the 3.X range.
First attempt was with a 2mm slot. The aluminium cell had 6.3 safety factor and I think this one was somewhere in the 3.X range.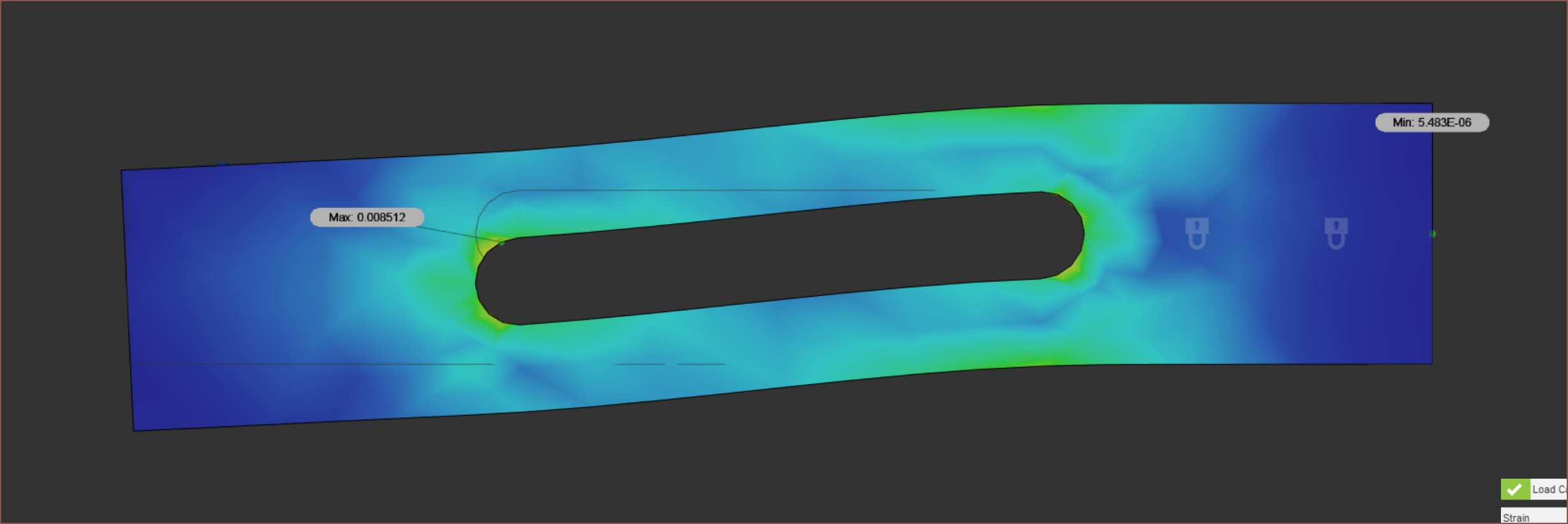
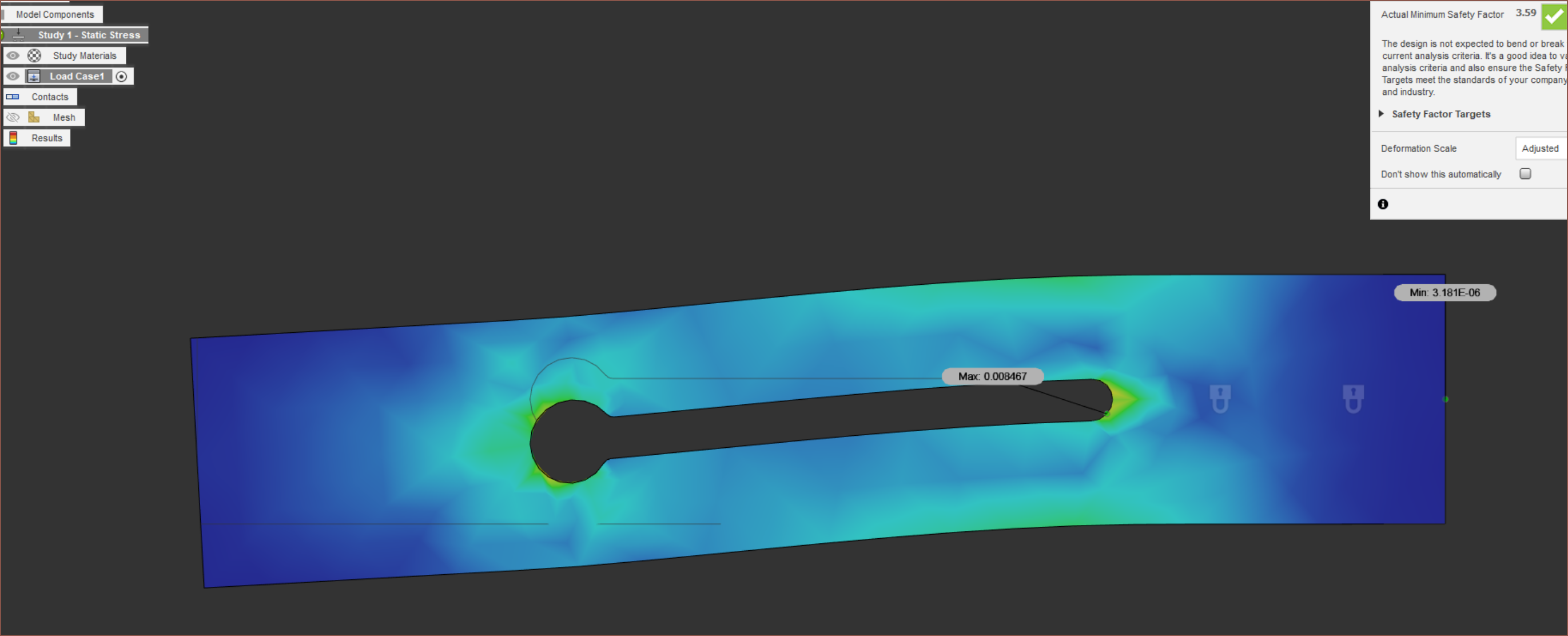
 This is just a rough estimate since there's apparently not a single strain guage CAD model on GrabCAD.
This is just a rough estimate since there's apparently not a single strain guage CAD model on GrabCAD.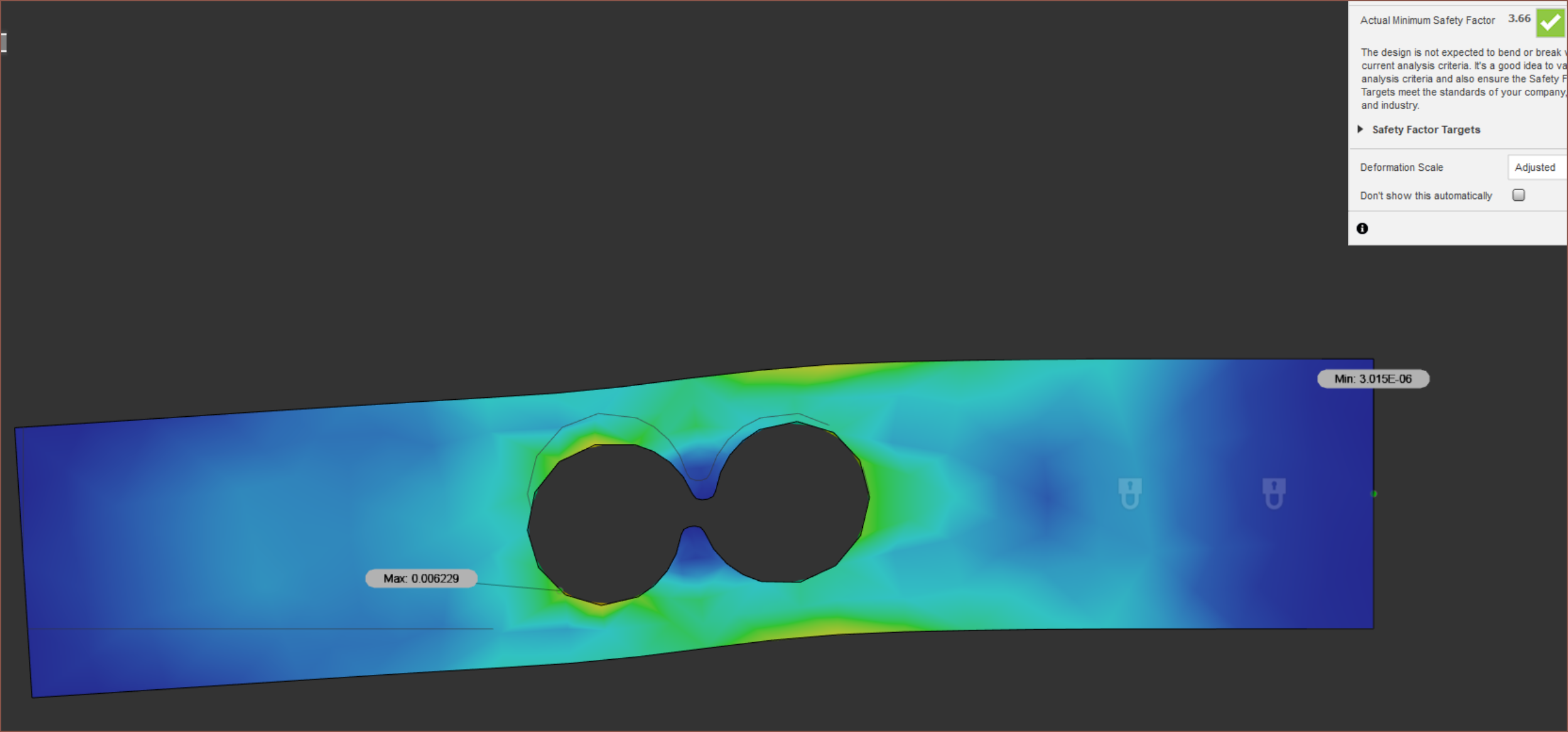
 Hmm still problematic on the left side.
Hmm still problematic on the left side.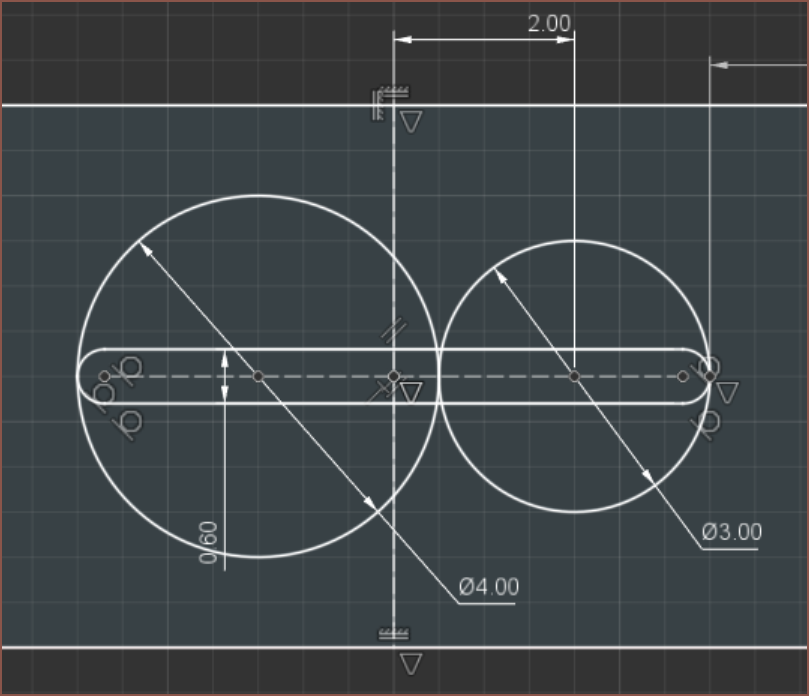
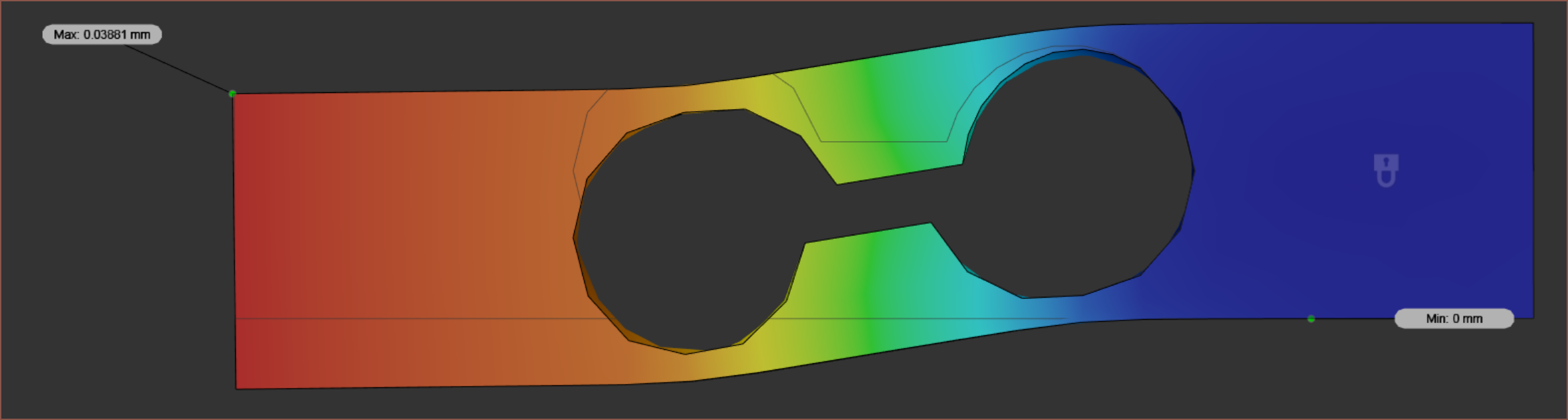
 Getting there, but the safety factor is questionable.
Getting there, but the safety factor is questionable. 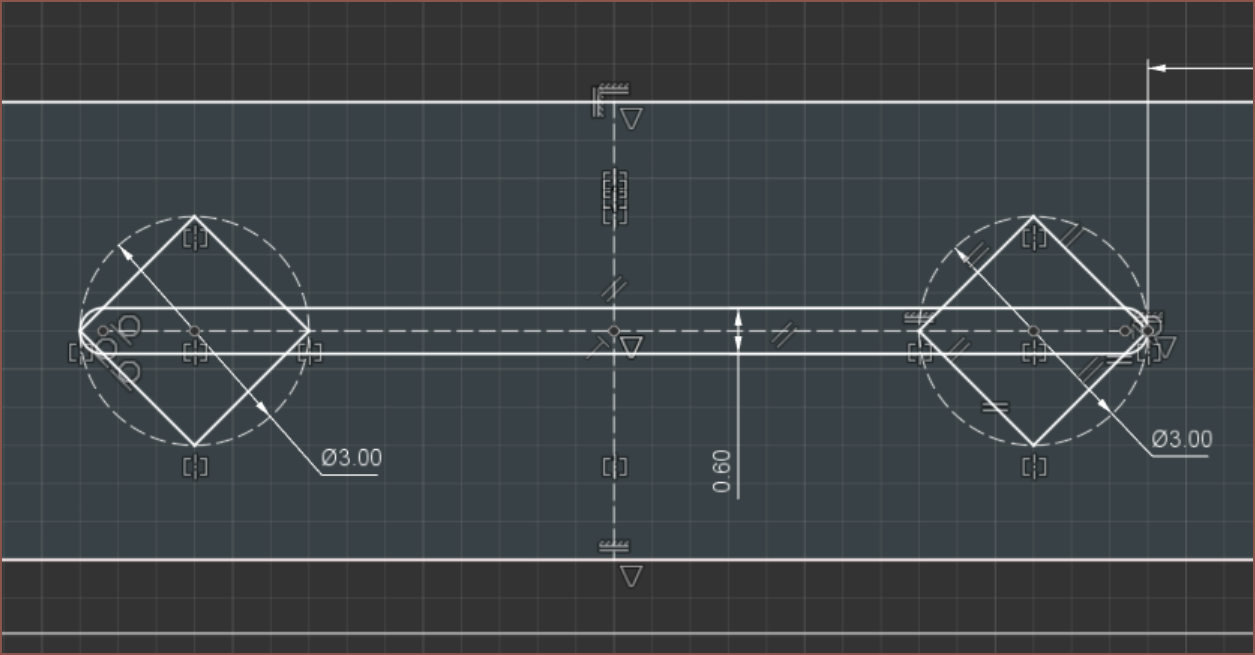
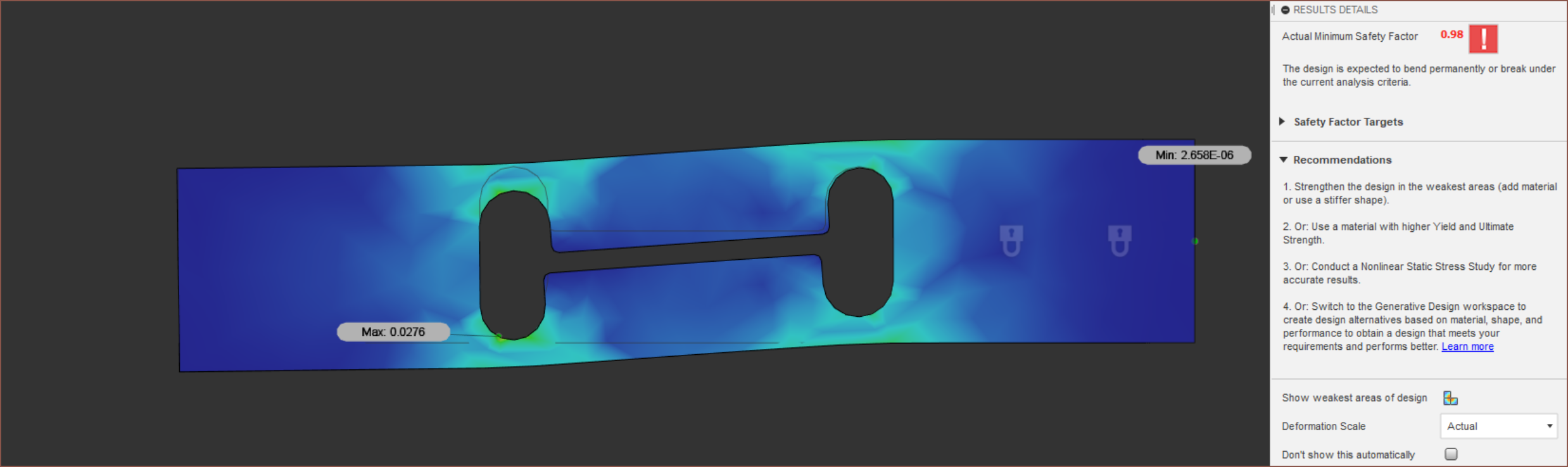
 Wow ovals are really bad, relatively speaking.
Wow ovals are really bad, relatively speaking.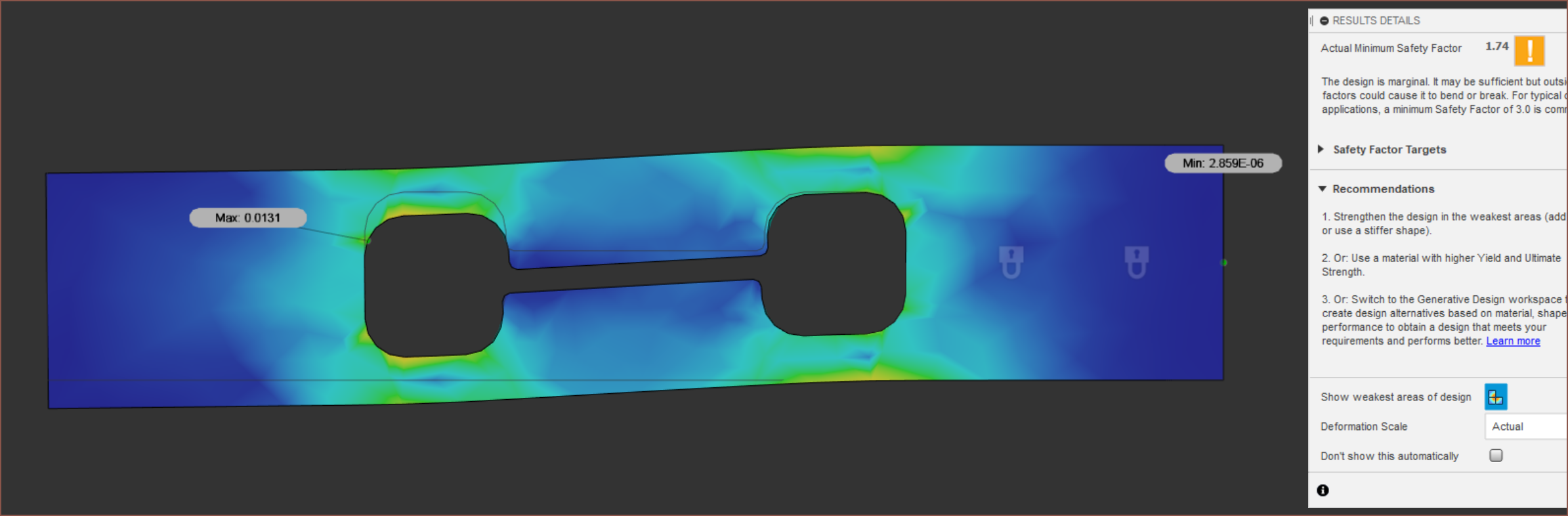
 Again, remember that all these are essentially for a 1kg load. I'm expecting the max to be half that.
Again, remember that all these are essentially for a 1kg load. I'm expecting the max to be half that. Interesting.
Interesting.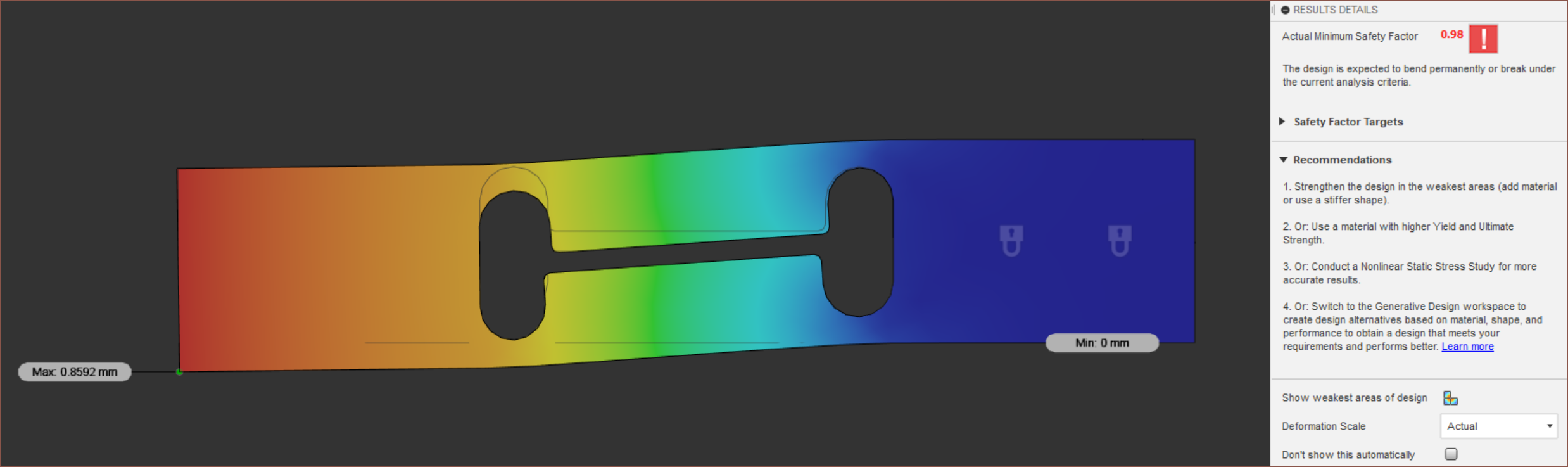
 I'm not all that sold. The thinnest wall is 0.8mm for this simulation.
I'm not all that sold. The thinnest wall is 0.8mm for this simulation.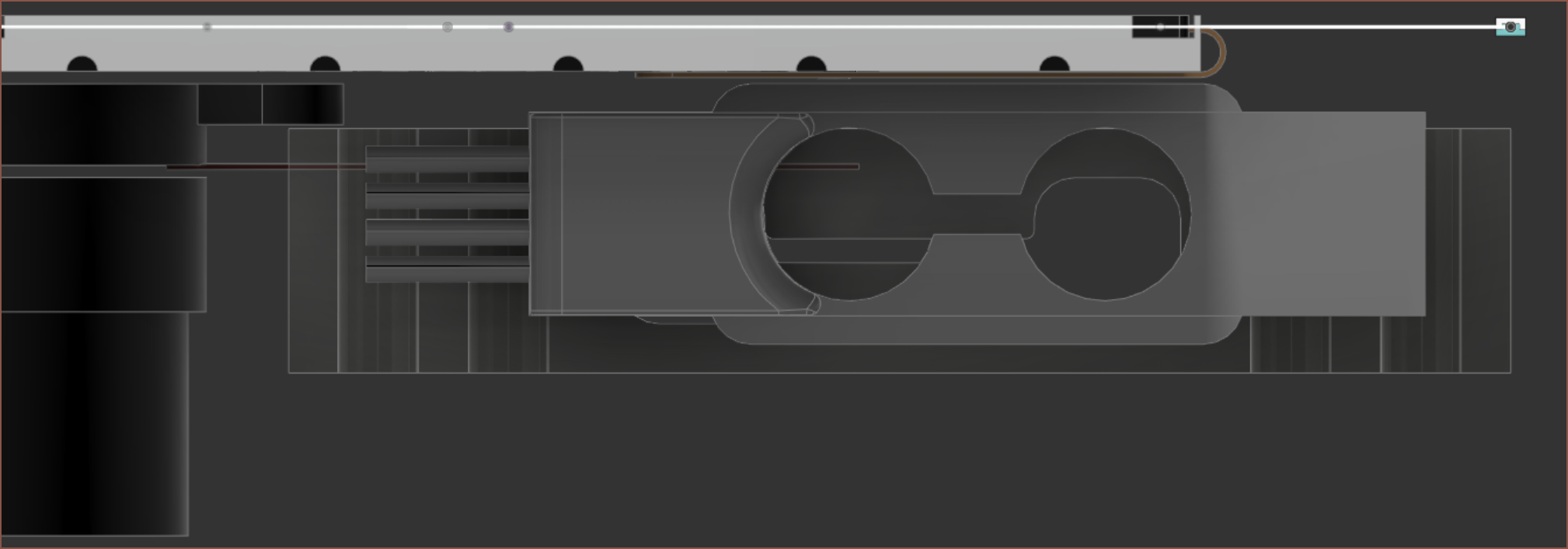 Add in the wires for the strain guage and there might not be enough space for everything else. I still have the option of going down to 1 bolt per side to reclaim back some space.
Add in the wires for the strain guage and there might not be enough space for everything else. I still have the option of going down to 1 bolt per side to reclaim back some space.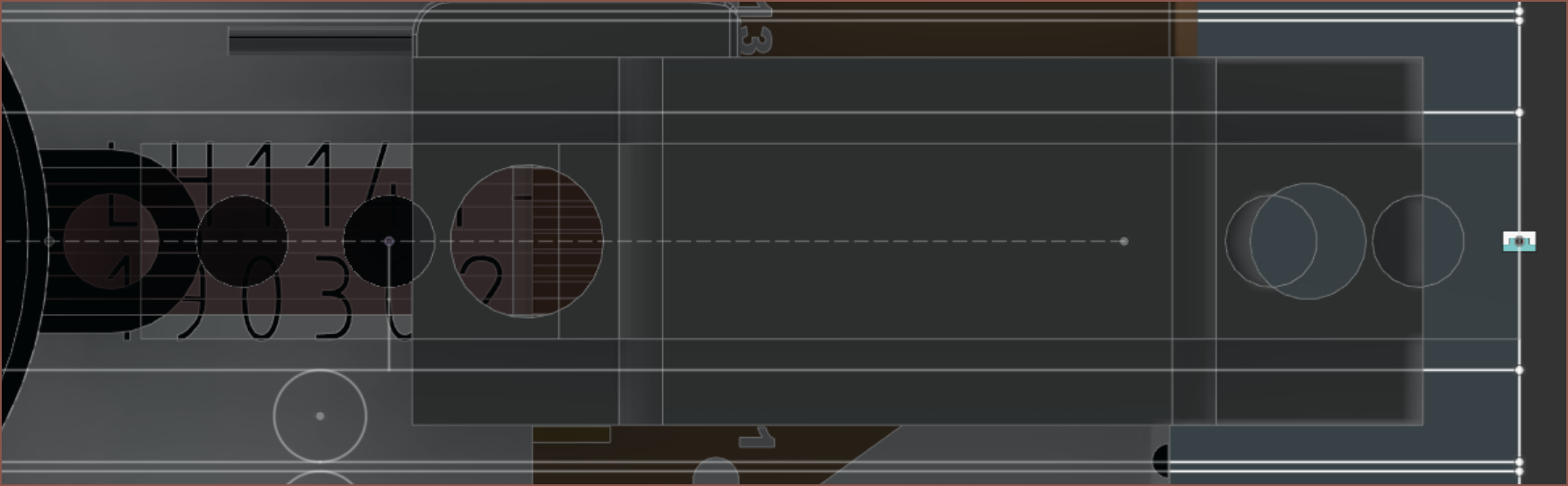
 I've increased the thickness to 5.5mm, removed one of the two case mounting holes and now the length is 25.8mm.
I've increased the thickness to 5.5mm, removed one of the two case mounting holes and now the length is 25.8mm. 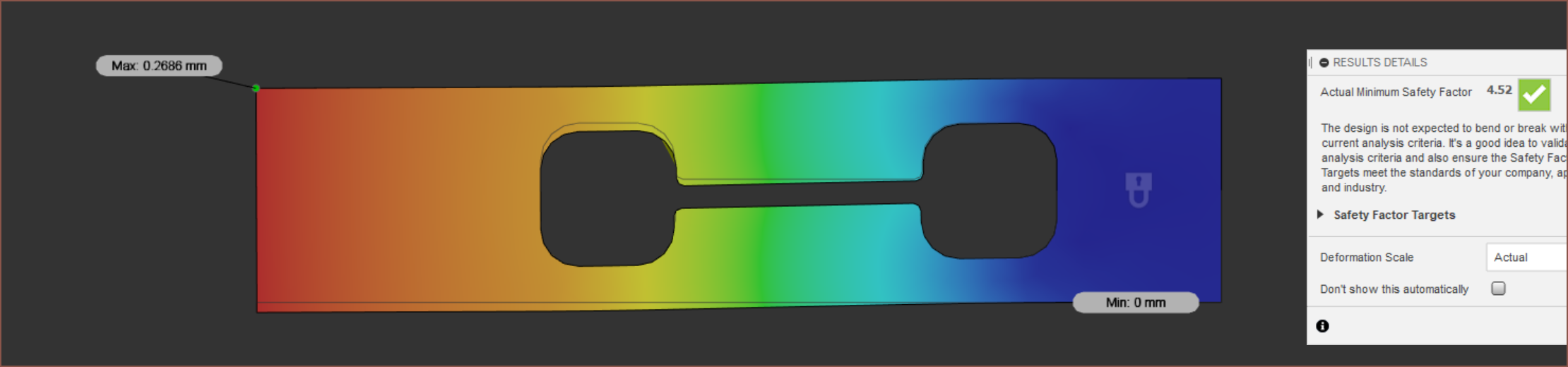
 I guess this will have to do. I could always increase the fillet 1->1.5mm to see the difference.
I guess this will have to do. I could always increase the fillet 1->1.5mm to see the difference.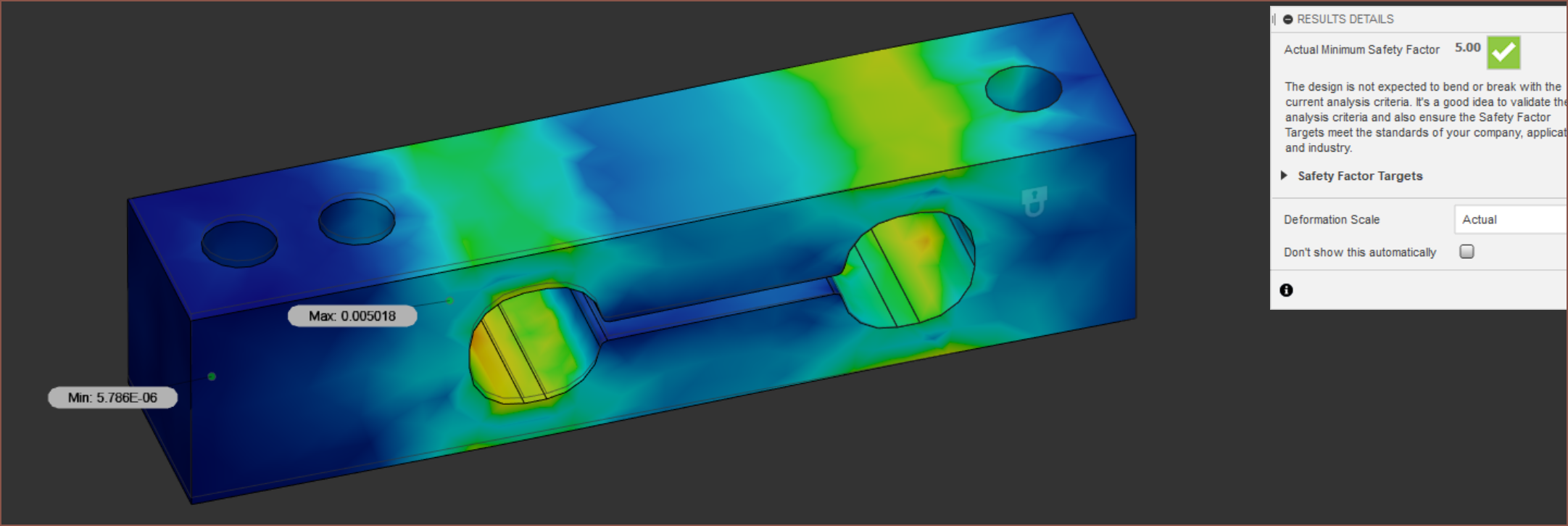
 That does seem to improve things. Full circular?
That does seem to improve things. Full circular?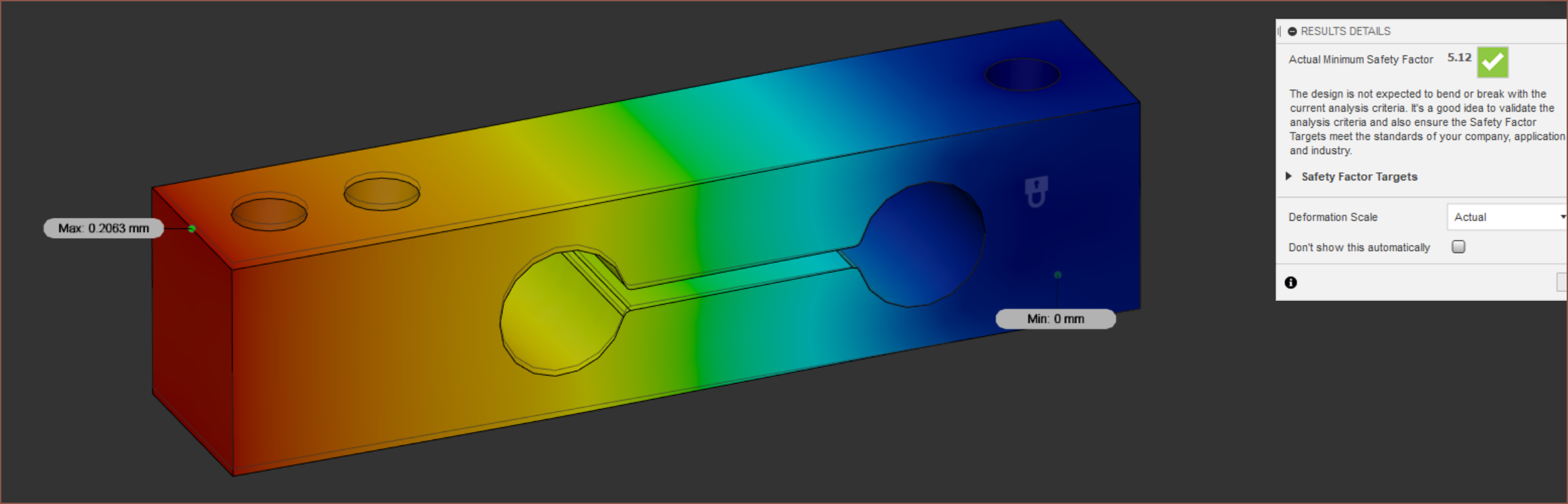
 Hmmm. Larger internal fillets 0.2->2mm?
Hmmm. Larger internal fillets 0.2->2mm?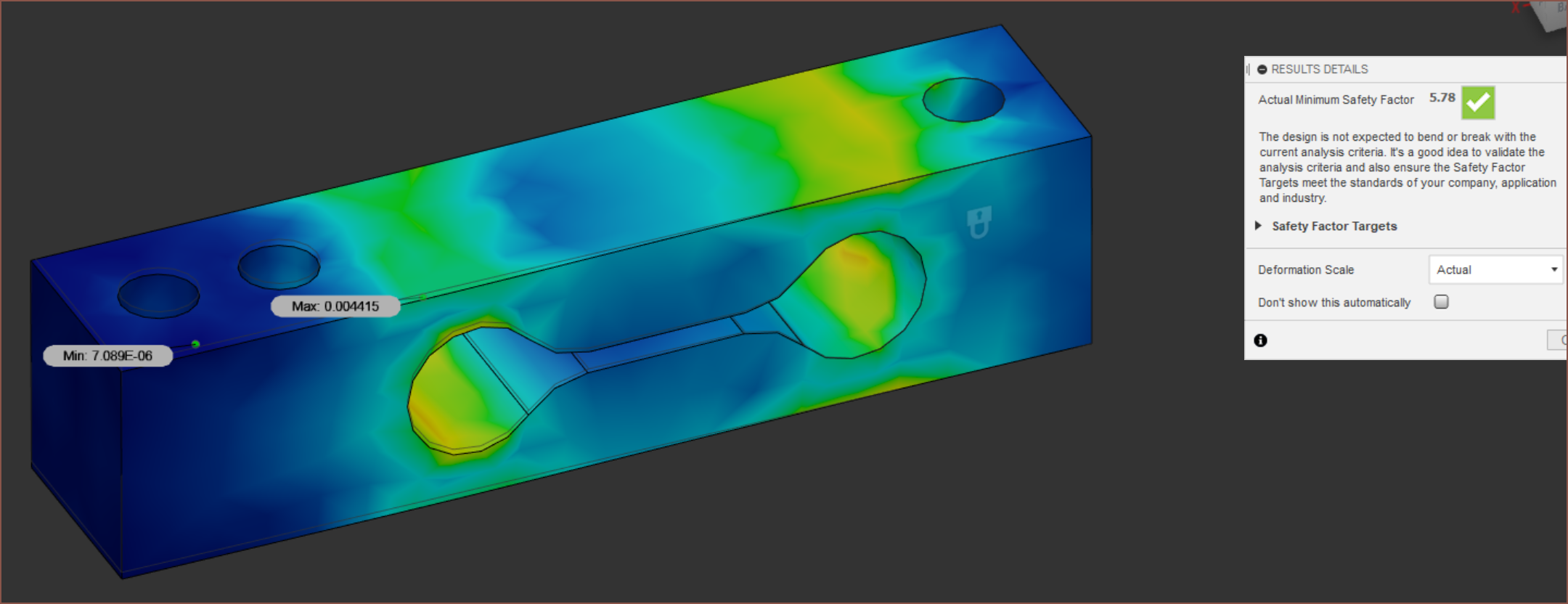
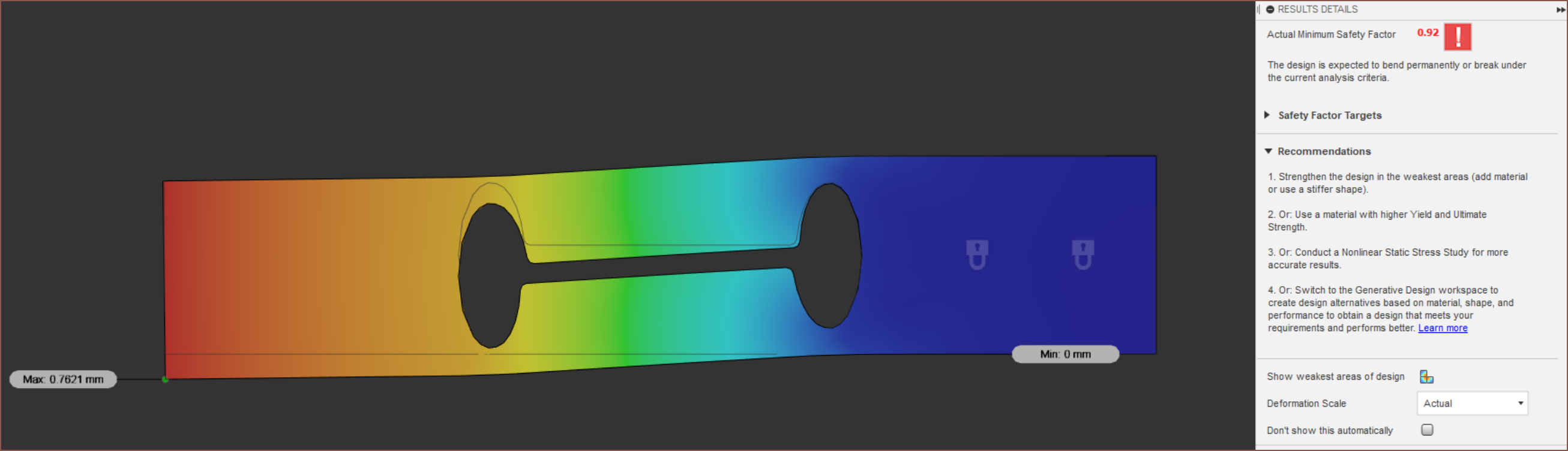
 Okay... perhaps I'd now have margain to go down to 0.9mm minimum thickness walls?
Okay... perhaps I'd now have margain to go down to 0.9mm minimum thickness walls?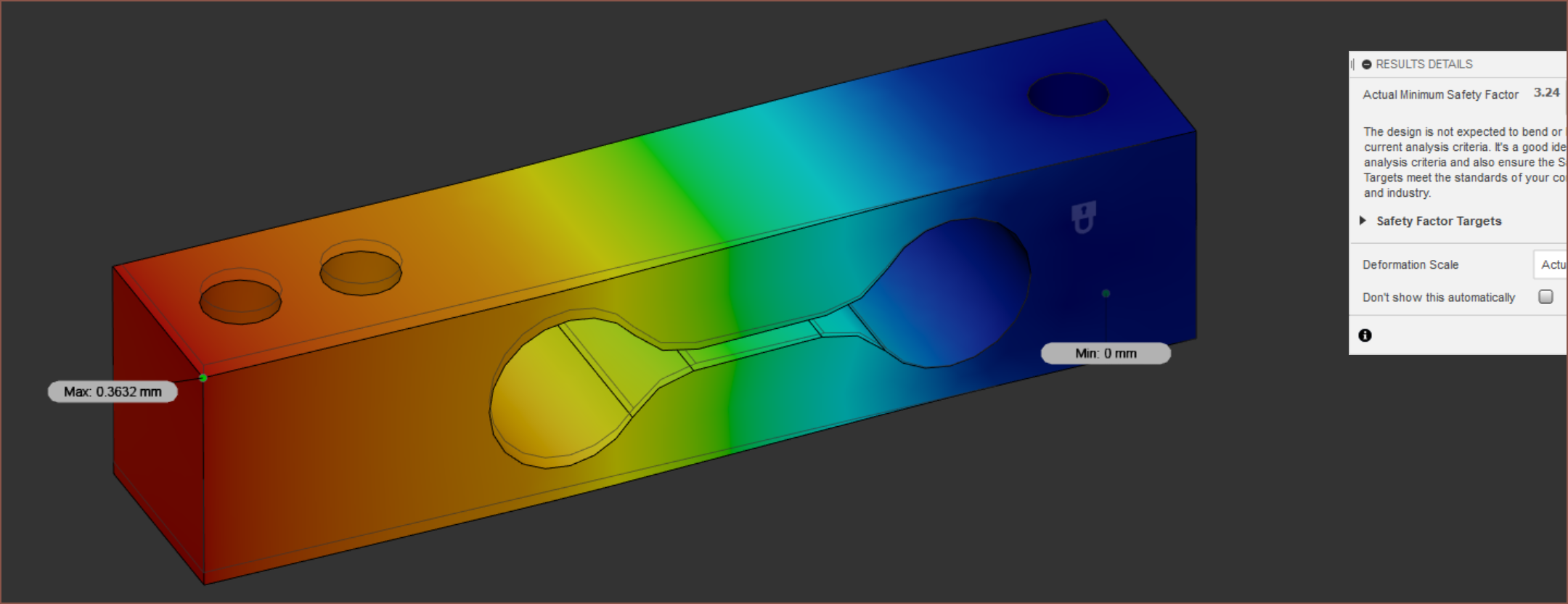
 The safety factor takes a hit but it does seem that the PCB mount side (the side with 2 mounting holes) has a more even strain. The length of the cell increases to 26.4mm aswell, and it's not like I even have that kind of space.
The safety factor takes a hit but it does seem that the PCB mount side (the side with 2 mounting holes) has a more even strain. The length of the cell increases to 26.4mm aswell, and it's not like I even have that kind of space.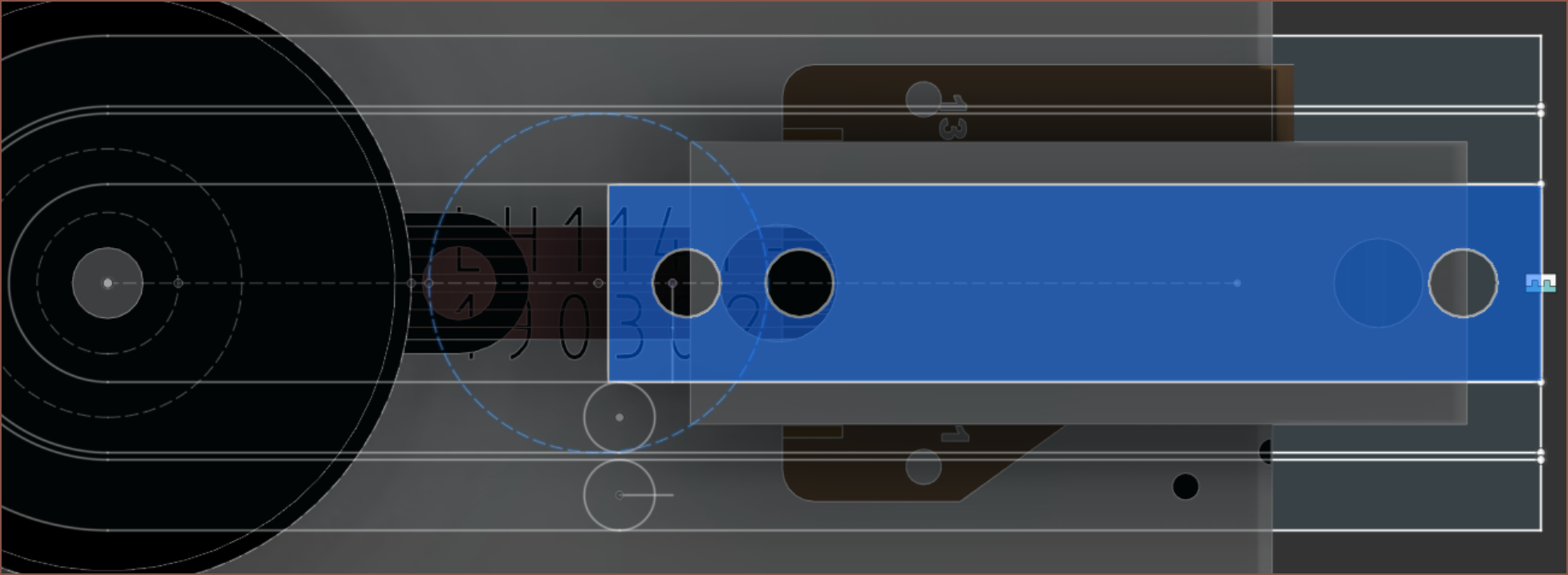 I need enough space for the magnet embedded sprocket. I may be forced to go down to only 2 mounting holes like the aluminium load cell. Alternatively, the total length could be increased to accomodate.
I need enough space for the magnet embedded sprocket. I may be forced to go down to only 2 mounting holes like the aluminium load cell. Alternatively, the total length could be increased to accomodate.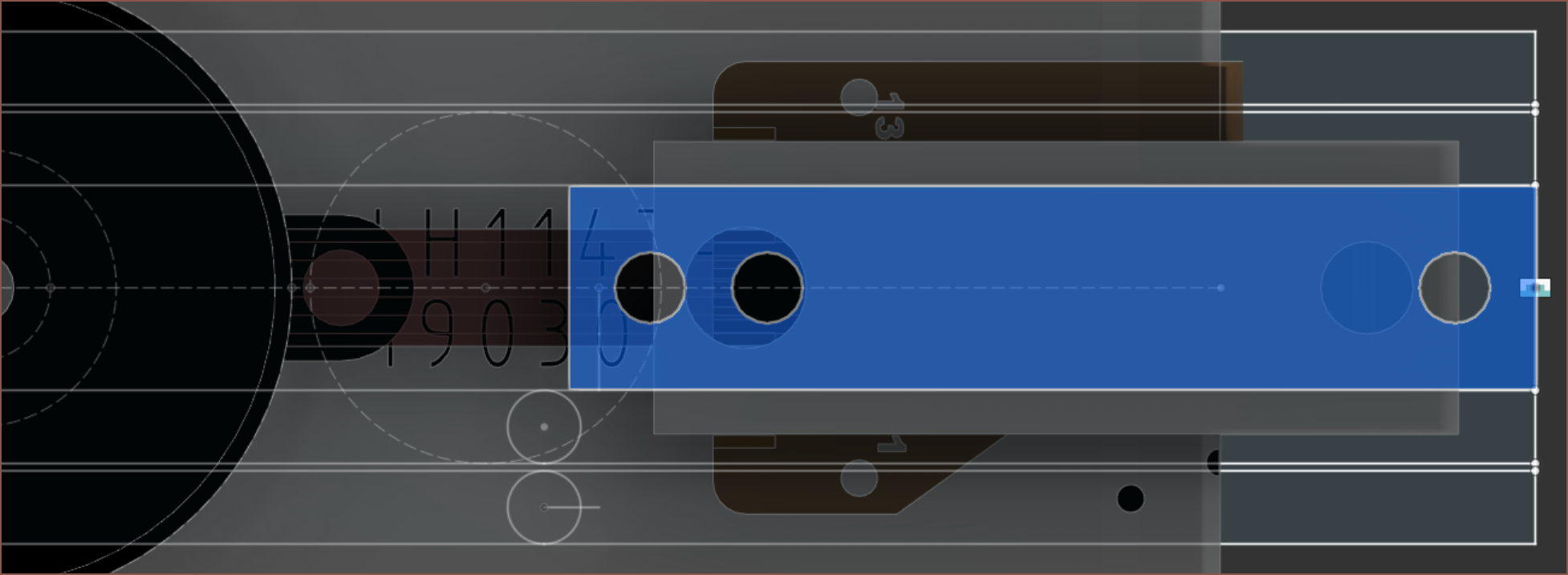 This is a 2mm overal increase.
This is a 2mm overal increase.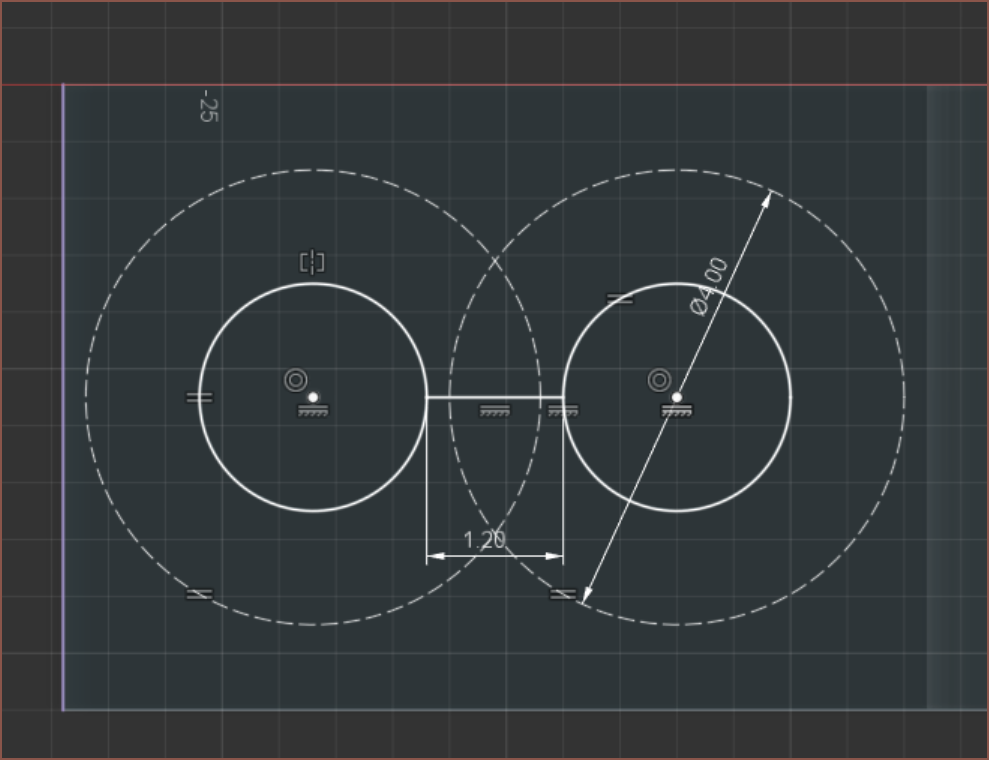 Ah. I forgot about the size of the M2 bolt caps. Adjusting the spacing and increasing the minimum load cell bone wall thickness to 1mm, I get a length of 27.6mm
Ah. I forgot about the size of the M2 bolt caps. Adjusting the spacing and increasing the minimum load cell bone wall thickness to 1mm, I get a length of 27.6mm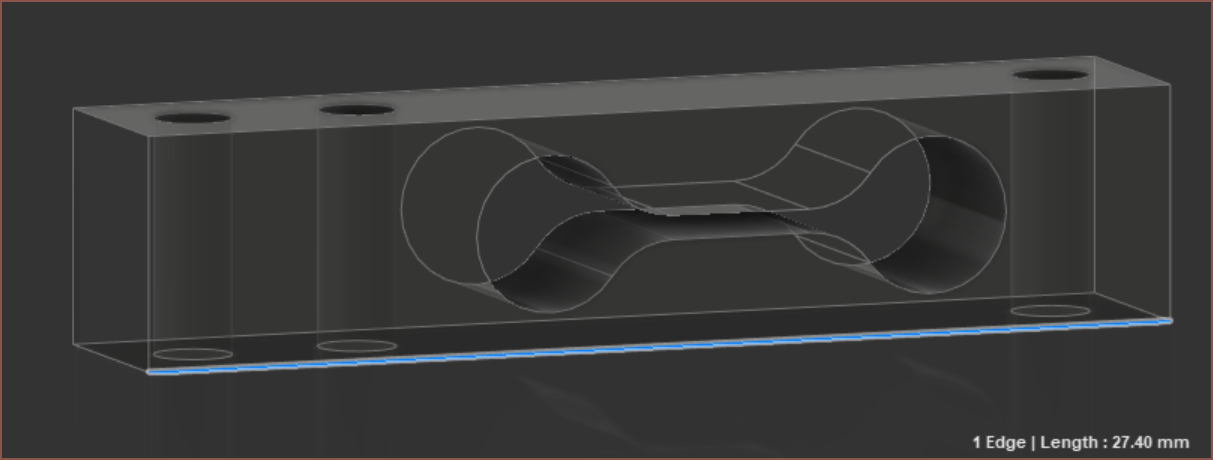
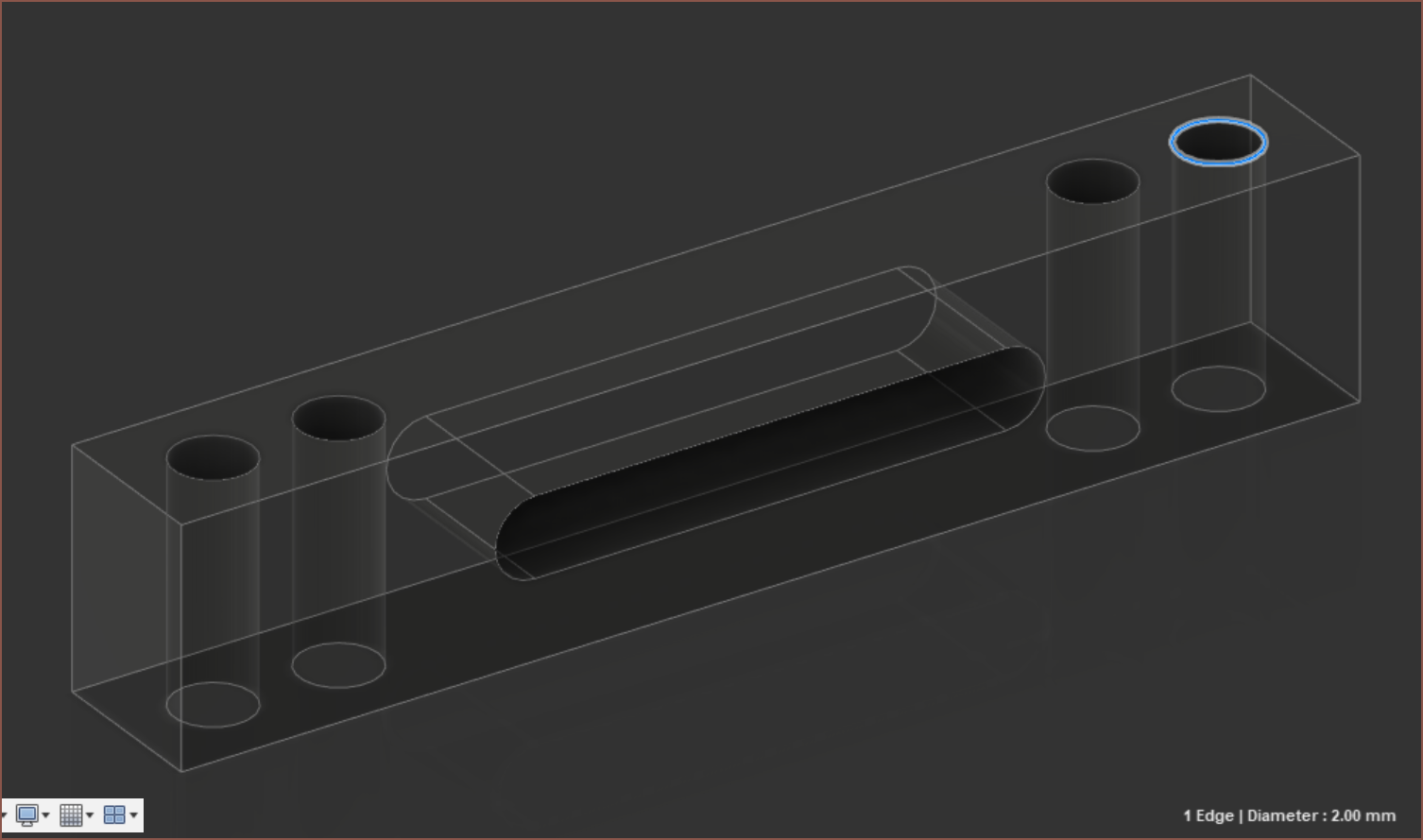
 Mng. It seems that getting 2 mounting holes is still unapologetically not happening. Lets just move on and simulate:
Mng. It seems that getting 2 mounting holes is still unapologetically not happening. Lets just move on and simulate: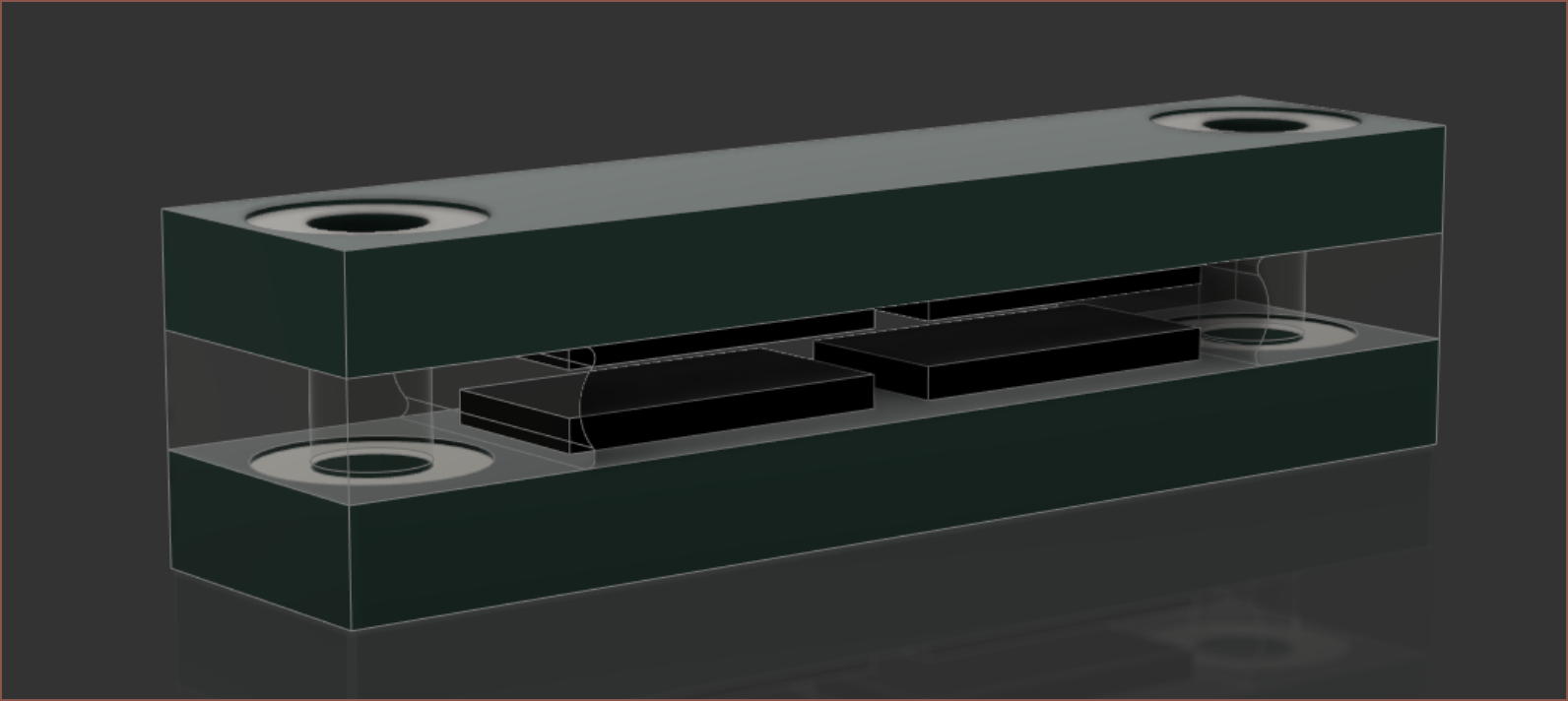 2mm PCB, PET spacers and 2512 resistors.
2mm PCB, PET spacers and 2512 resistors.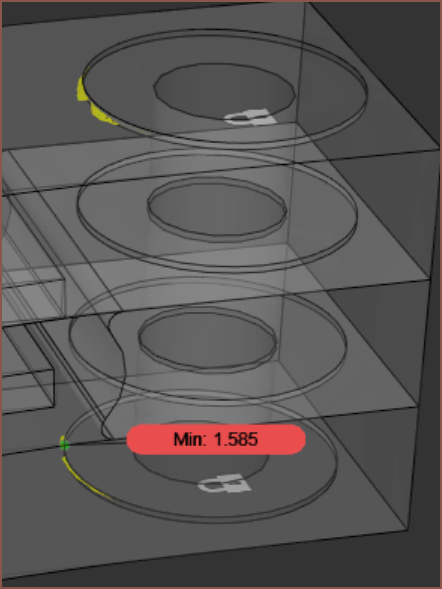
 Done.
Done.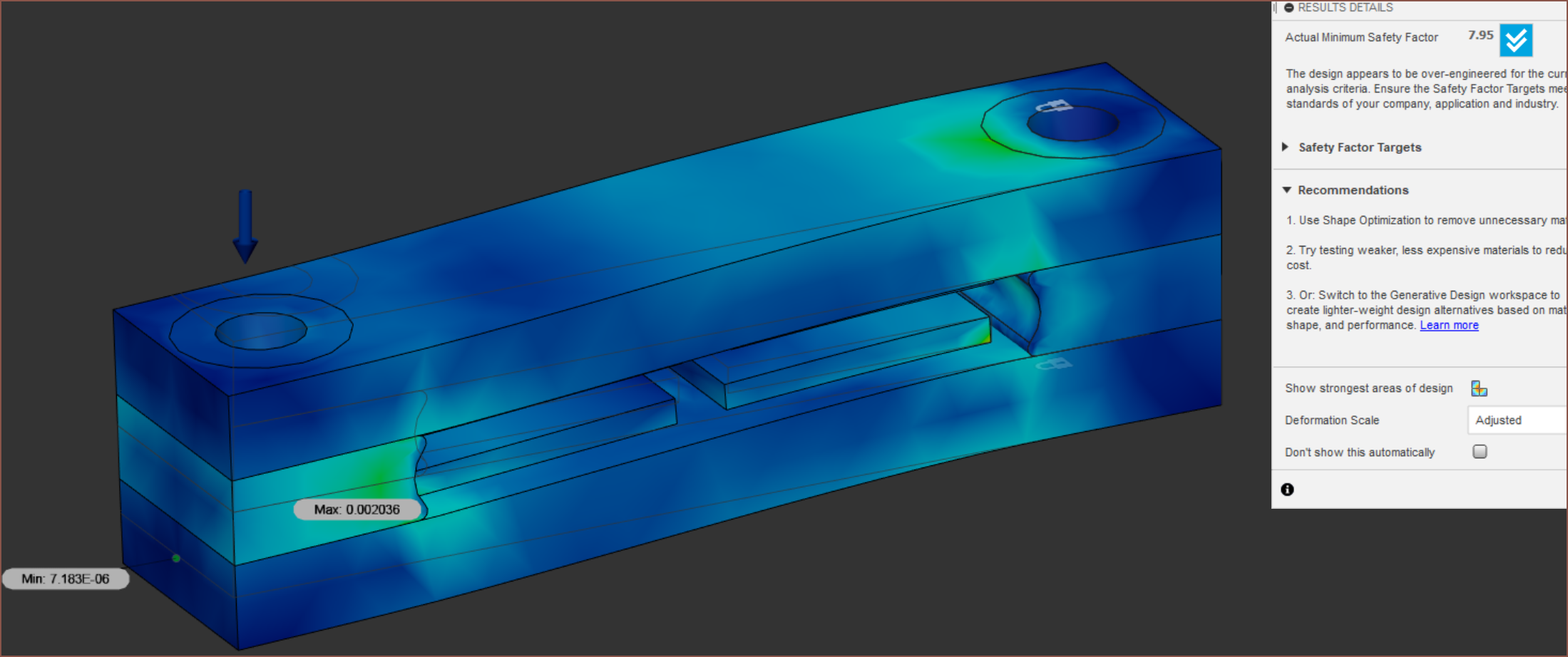
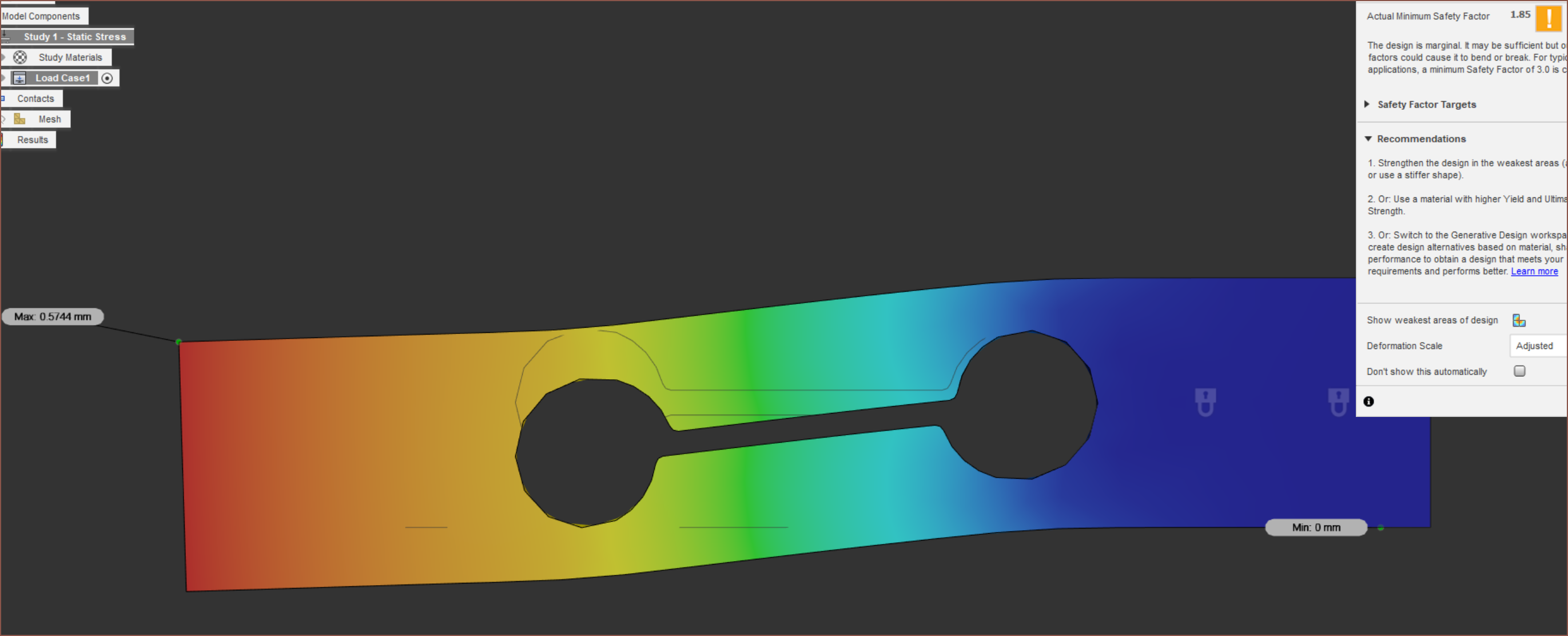
 Great safety factor and max displacement, but the flex is in the wrong places.
Great safety factor and max displacement, but the flex is in the wrong places.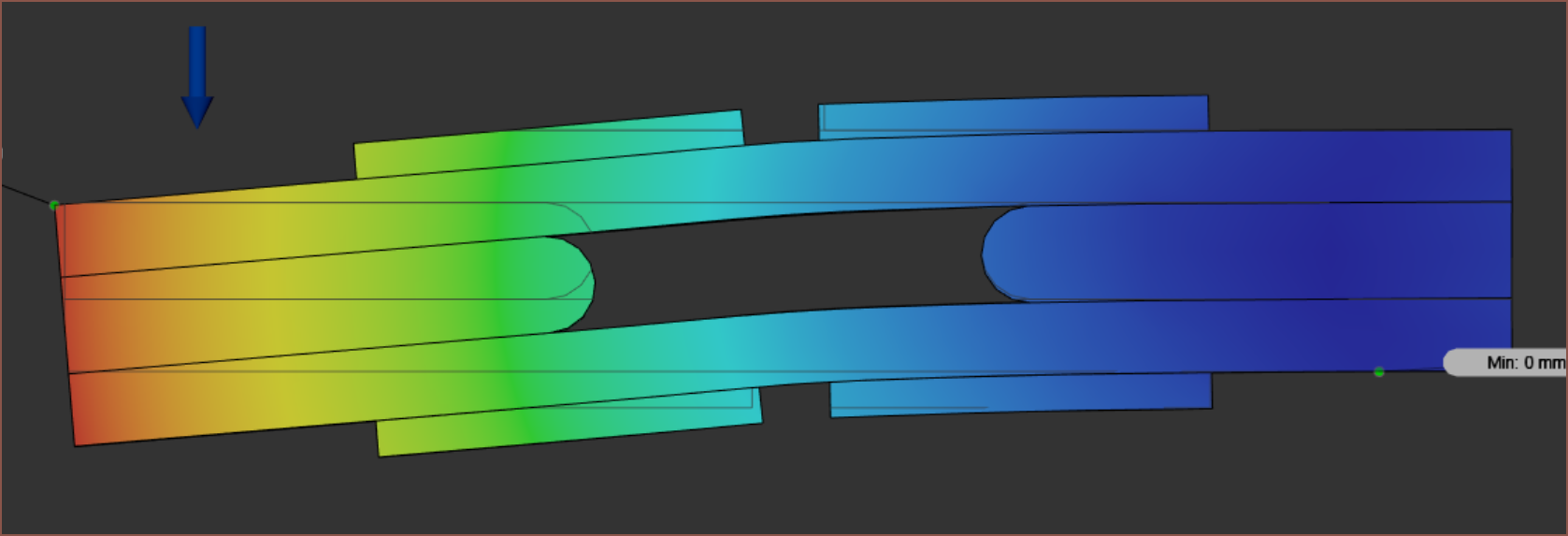 Oh my!
Oh my!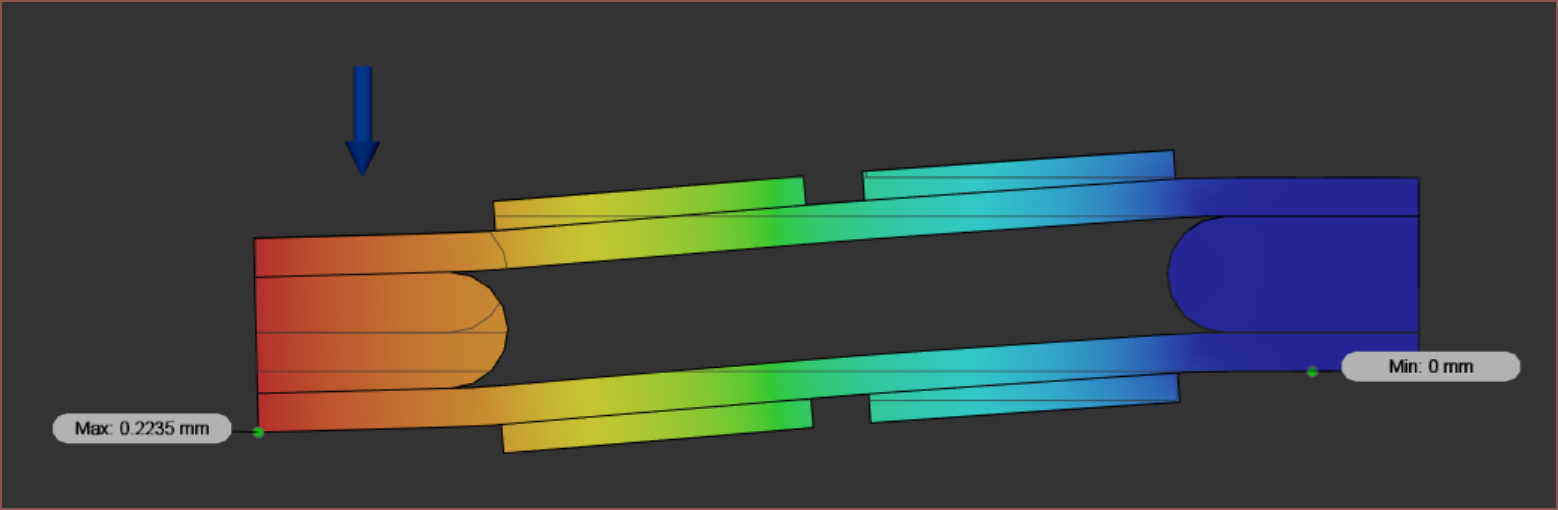 okay...
okay...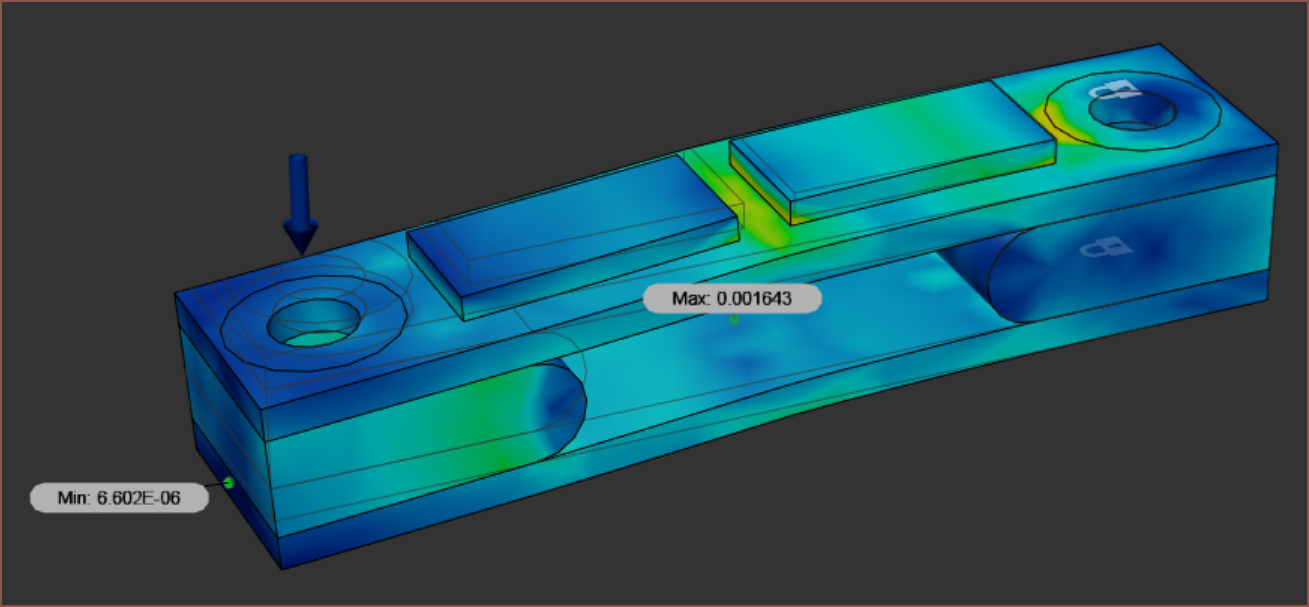 It would appear that the resistors are essentially adding stiffness in the area where I want to flex. Perhaps I need to adjust the contacts to reflect that the resistor isn't attached across the whole length and just at the solder ends.
It would appear that the resistors are essentially adding stiffness in the area where I want to flex. Perhaps I need to adjust the contacts to reflect that the resistor isn't attached across the whole length and just at the solder ends.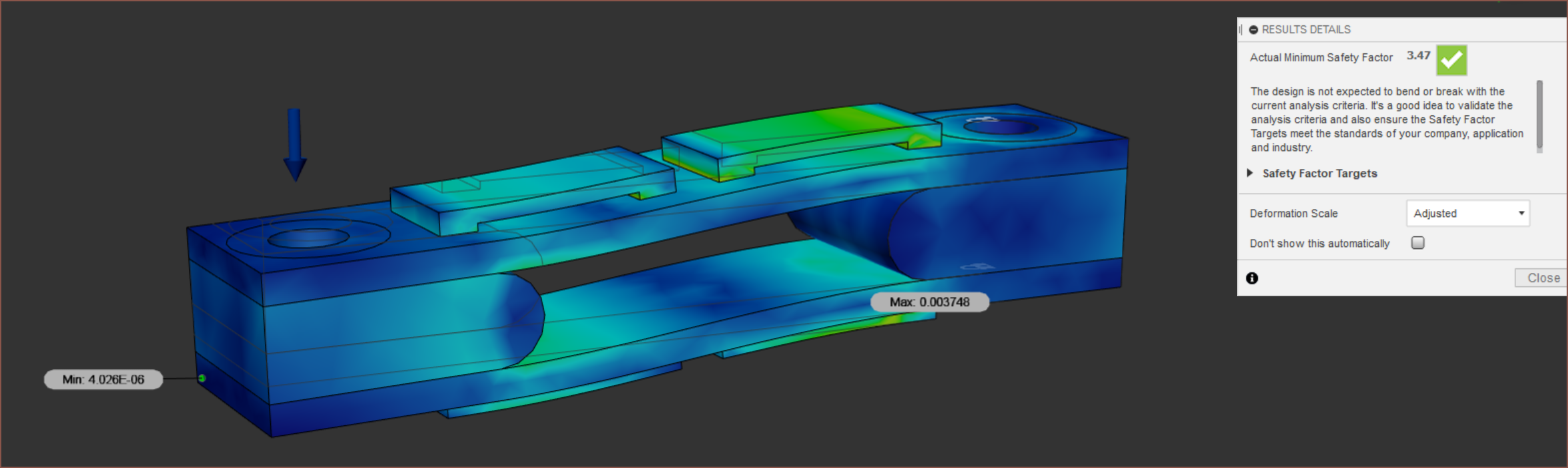 Okay alright. Not sure if it's good enough for science though. I should note that I'm expecting each of the 7+ actuation levels of Tetent to be 8g spacing, with a +/-2g crossover haptic. I'm not using this for a binary solution like Smartknob.
Okay alright. Not sure if it's good enough for science though. I should note that I'm expecting each of the 7+ actuation levels of Tetent to be 8g spacing, with a +/-2g crossover haptic. I'm not using this for a binary solution like Smartknob.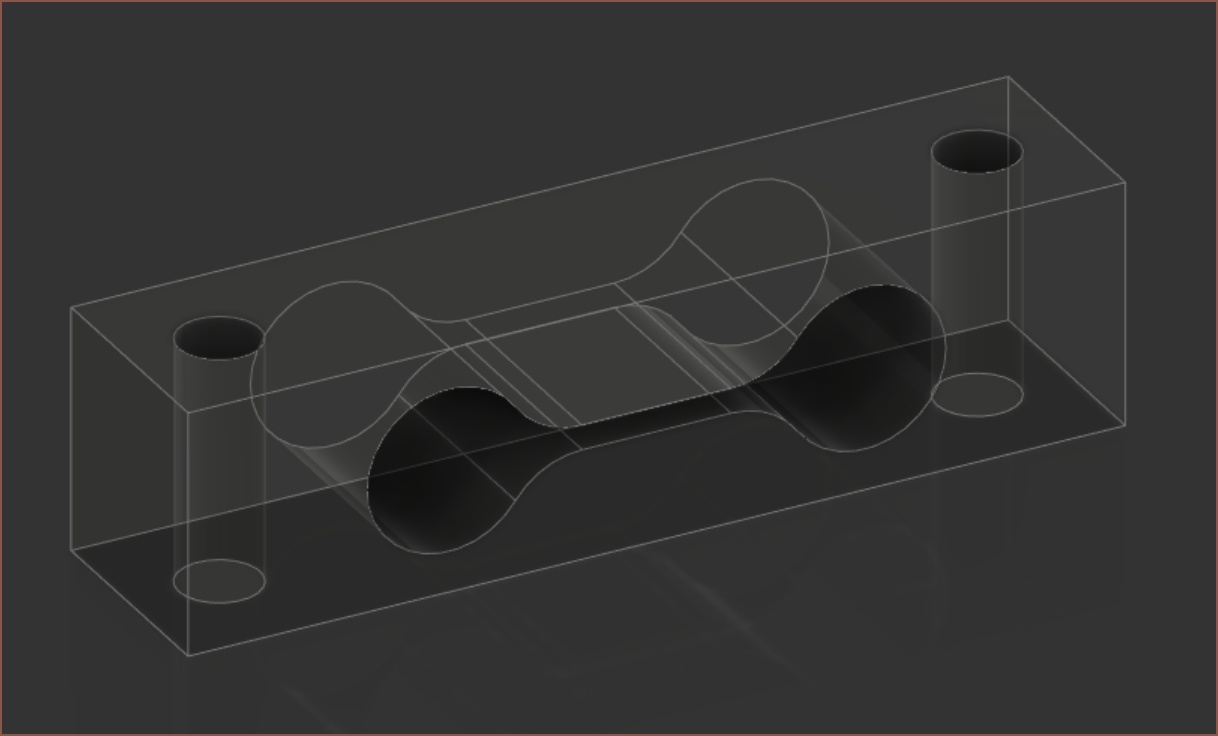
 The concerns I have is that the total length is now 50mm and the distance between the bottom edge of the screen and the bottom edge is around 10mm. Both concerns stem from
The concerns I have is that the total length is now 50mm and the distance between the bottom edge of the screen and the bottom edge is around 10mm. Both concerns stem from 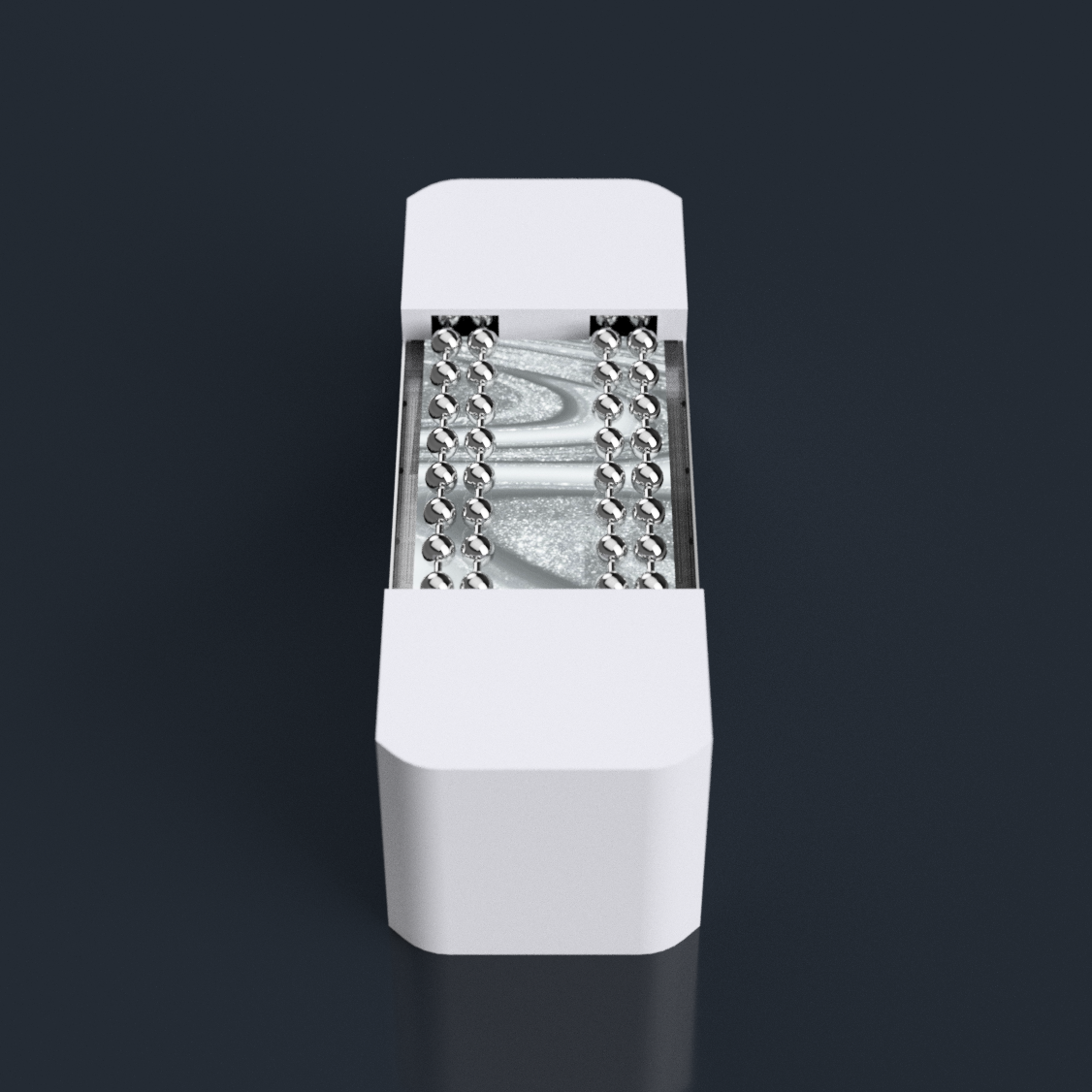

 Conclusion
Conclusion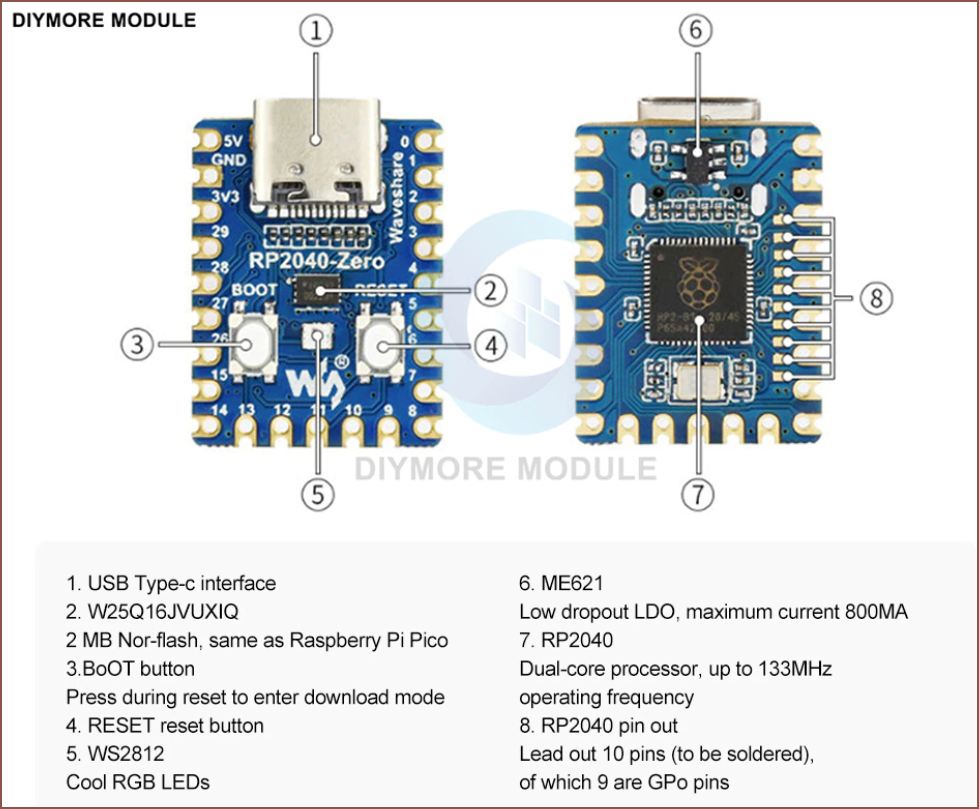 I think I have enough data that I can start modelling a solution.
I think I have enough data that I can start modelling a solution.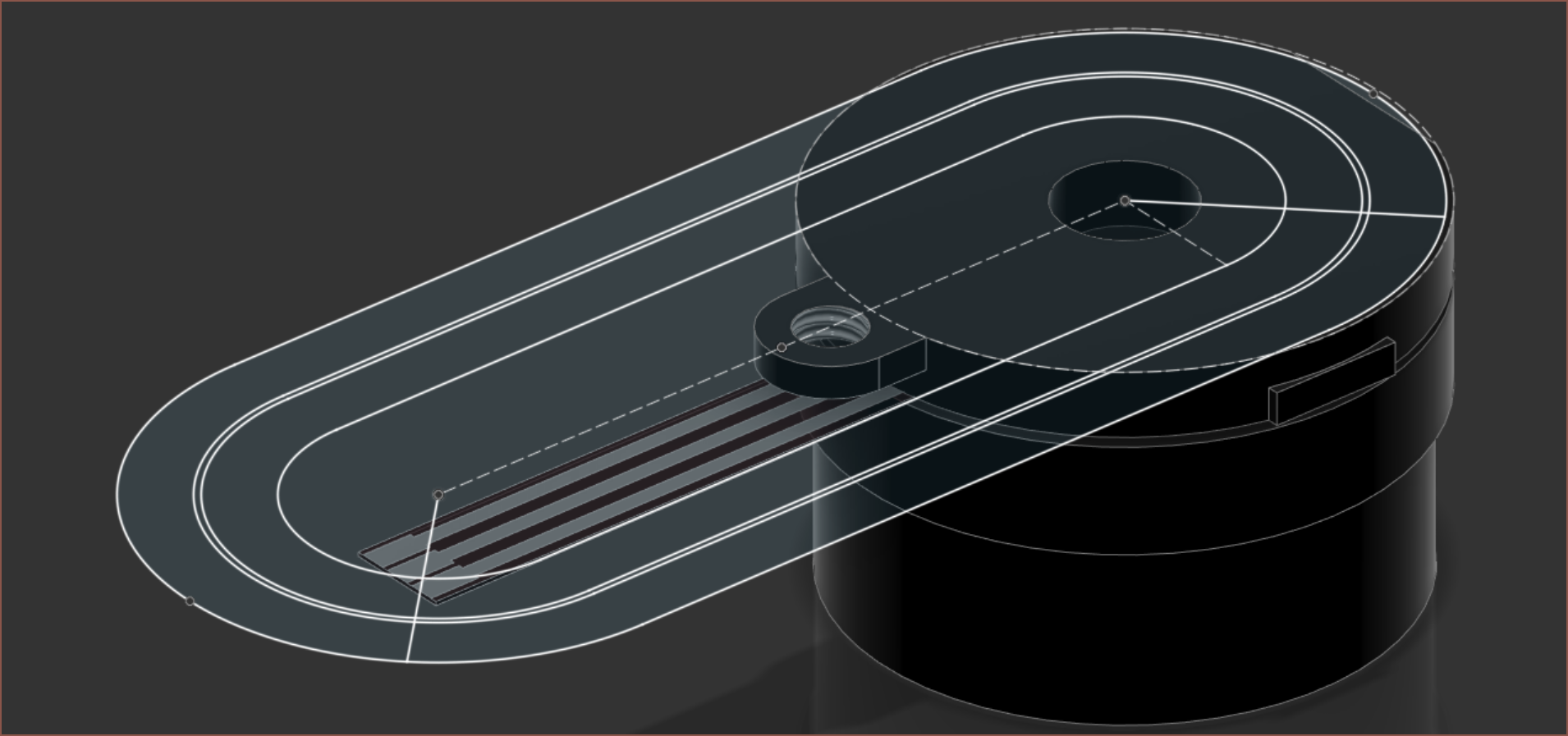 Load Cell Thoughts
Load Cell Thoughts Obviously the screen option is going to be more expensive and more complicated to implement. I'm just wondering if those drawbacks are still worth an implementation. The aesthetic sells, even if one is unlikely to actually see the Tetrinsics in actual use with Tetent.
Obviously the screen option is going to be more expensive and more complicated to implement. I'm just wondering if those drawbacks are still worth an implementation. The aesthetic sells, even if one is unlikely to actually see the Tetrinsics in actual use with Tetent.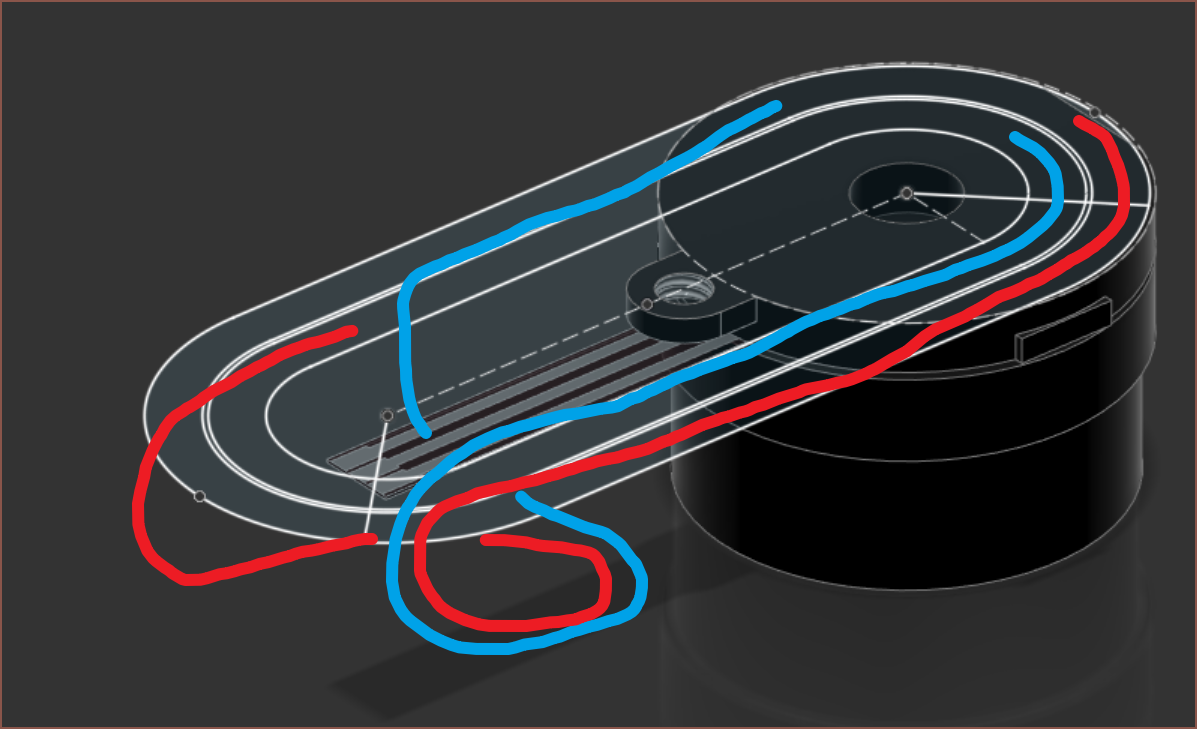
 The red path would mean that specific left and right sides don't have to be printed (like the current belt design), but I'd have less mounting space for the load cell.
The red path would mean that specific left and right sides don't have to be printed (like the current belt design), but I'd have less mounting space for the load cell. If I just look into any USB enabled, 32 bit microcontroller, an option is this tiny BGA:
If I just look into any USB enabled, 32 bit microcontroller, an option is this tiny BGA: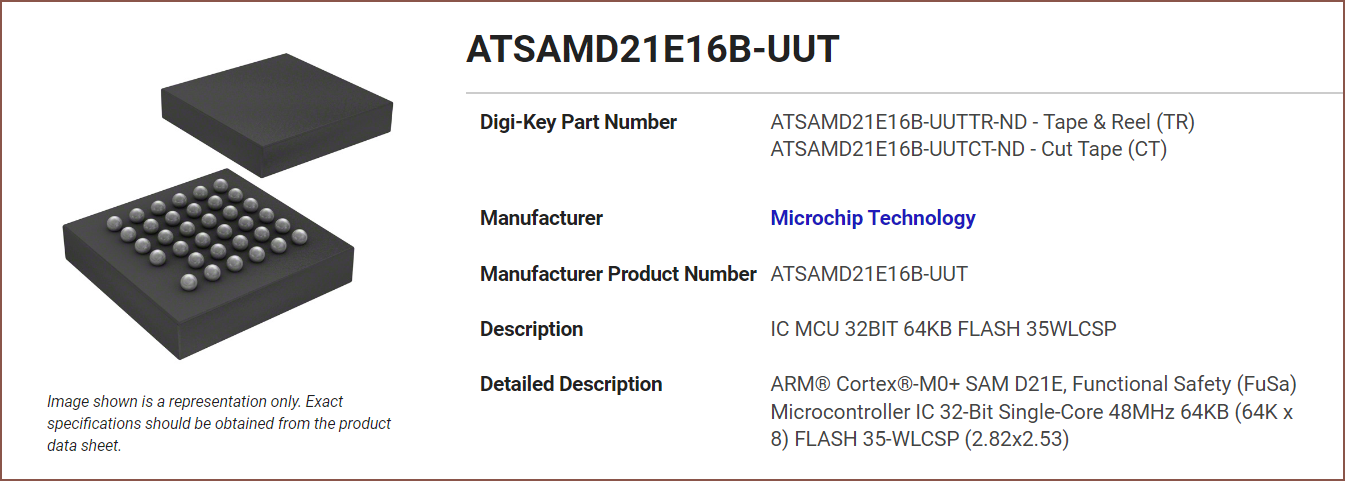 This might not be an option though since routing the pins out might be tough on 2 layers, and there's only 3 more IO pins than the M032 I'm using now. That's also an entire other datasheet that I have to read through.
This might not be an option though since routing the pins out might be tough on 2 layers, and there's only 3 more IO pins than the M032 I'm using now. That's also an entire other datasheet that I have to read through. This one sounds really good.
This one sounds really good. SIX POUNDS?! Outto stock?! What?? What happened to the 385?
SIX POUNDS?! Outto stock?! What?? What happened to the 385? Huh? Is this from some "Marketplace" thing?
Huh? Is this from some "Marketplace" thing?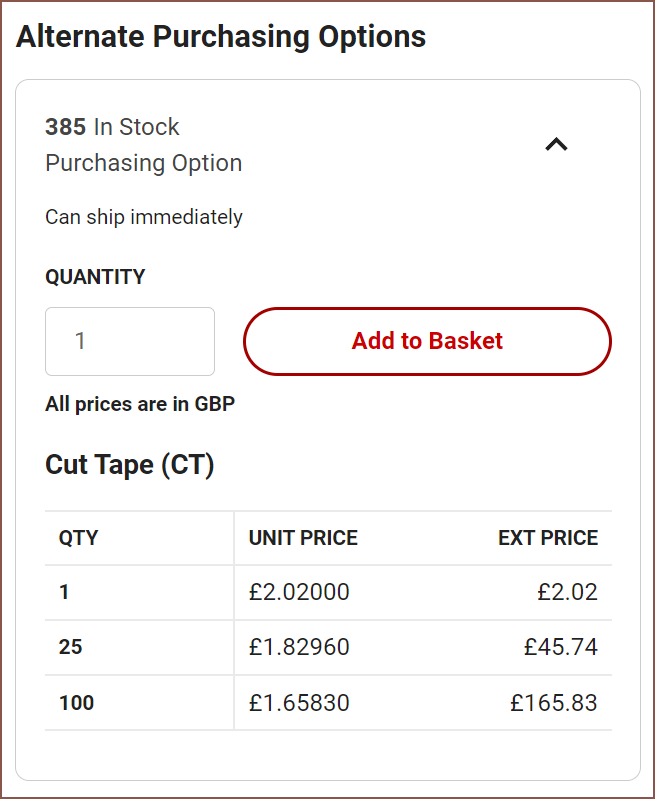 No it looks... perfectly fine... so then why...? Do they just not have Amazon's feature that automatically shows the in-stock listing, or perhaps they deliberately show the higher cost option?
No it looks... perfectly fine... so then why...? Do they just not have Amazon's feature that automatically shows the in-stock listing, or perhaps they deliberately show the higher cost option? The memory chip is external and there's only 4 analog pins. I think that I only need 4 actually, so this might not be a problem. I've got more worry about the size of this external flash; I predict that I'd have more PCB space but I don't know if I'd have enough for a 7x7 chip and some flash storage. Additionaly, the absolute max rating is 3.63V and the LDO source is 3.45V nominally IIRC (3.3V rated, 3.6V abs max). The LCD is also 3.3V, so perhaps I'd have to take the digital voltage down anyway, but I'll try it and spin up a new PCB if it fails.
The memory chip is external and there's only 4 analog pins. I think that I only need 4 actually, so this might not be a problem. I've got more worry about the size of this external flash; I predict that I'd have more PCB space but I don't know if I'd have enough for a 7x7 chip and some flash storage. Additionaly, the absolute max rating is 3.63V and the LDO source is 3.45V nominally IIRC (3.3V rated, 3.6V abs max). The LCD is also 3.3V, so perhaps I'd have to take the digital voltage down anyway, but I'll try it and spin up a new PCB if it fails.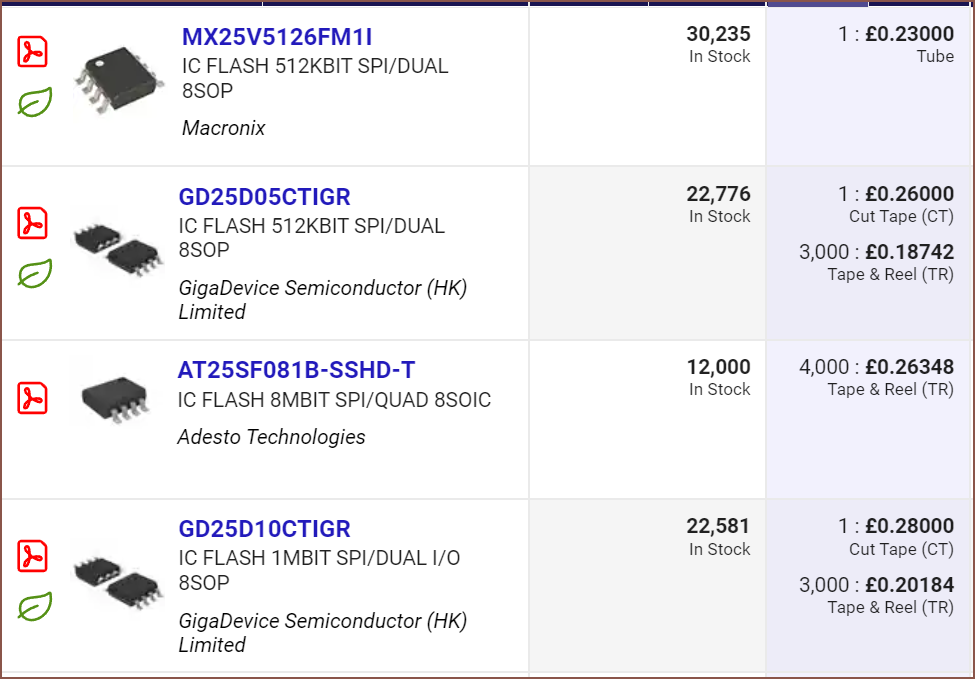 Wow. They're all in this standard 8SOP package and really cheap. I don't think I'd ever have to worry about compile space with 1 M...bit? Wait has memory been specified in bits this entire time?
Wow. They're all in this standard 8SOP package and really cheap. I don't think I'd ever have to worry about compile space with 1 M...bit? Wait has memory been specified in bits this entire time?  Oh so is that why there's an "x 8" or "x 16" or something for these microcontroller specs?
Oh so is that why there's an "x 8" or "x 16" or something for these microcontroller specs? Ahhhh okay okay. Is there anything else specific I should be on the lookout for?
Ahhhh okay okay. Is there anything else specific I should be on the lookout for?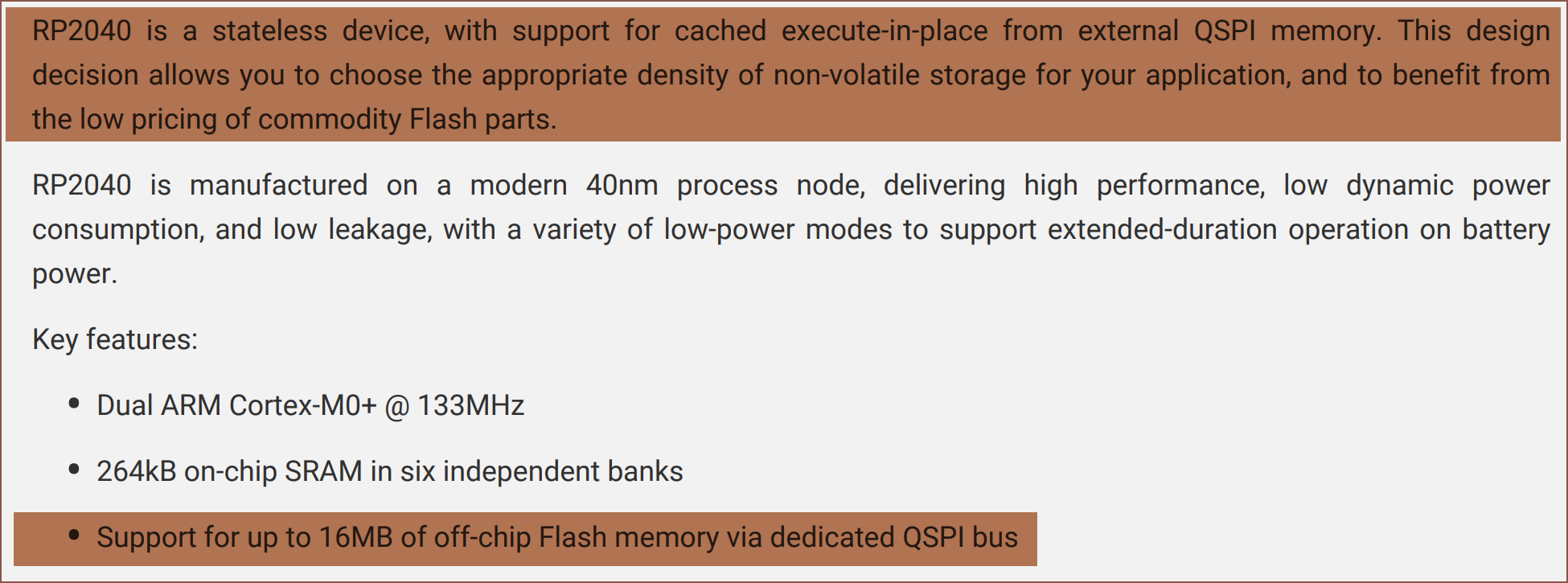
 Ahhhh mmmmnnn.
Ahhhh mmmmnnn.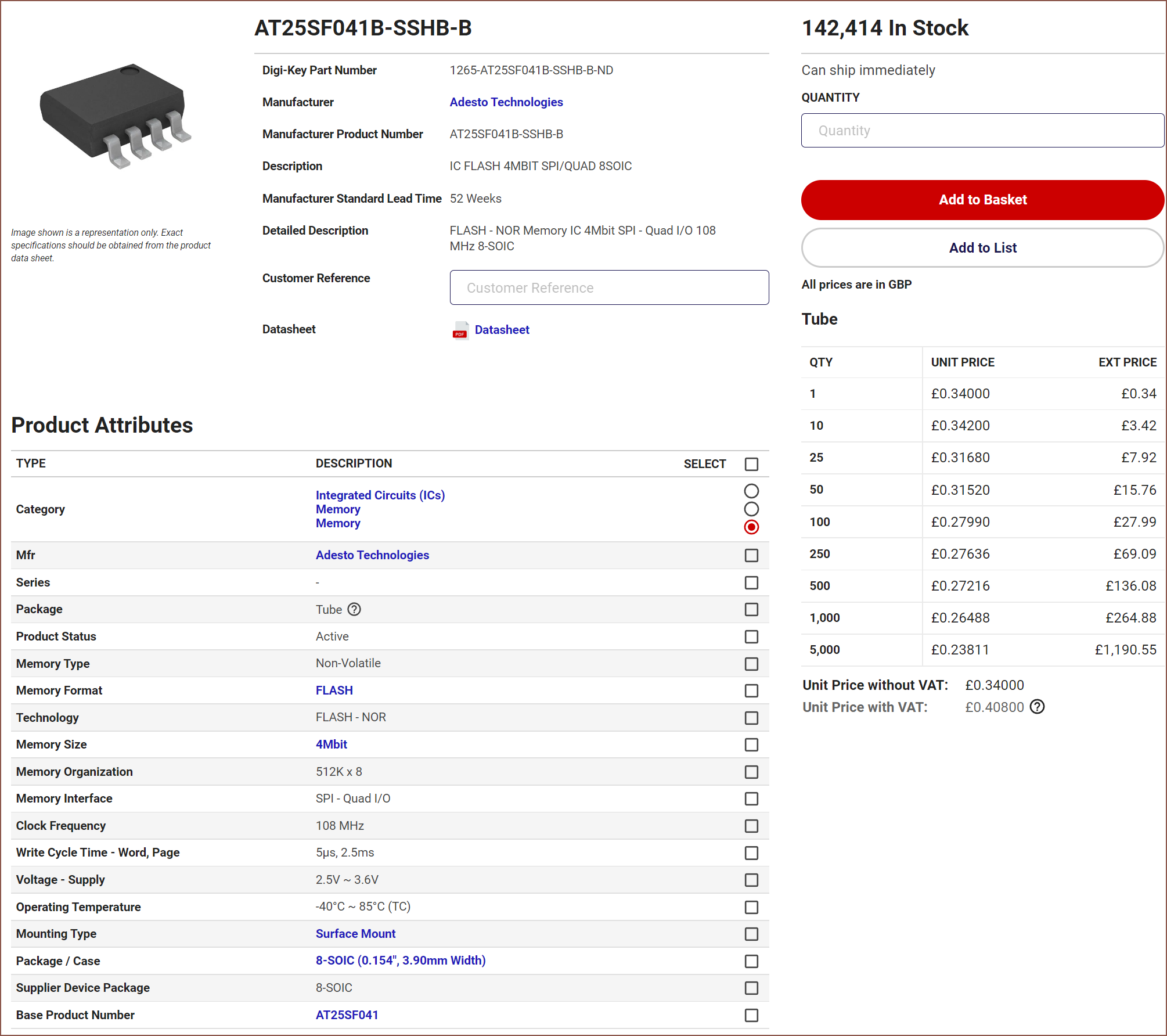 This looks like a good one. No idea why 10pcs costs slightly more than 1, but at 34p per each I'll look the other way.
This looks like a good one. No idea why 10pcs costs slightly more than 1, but at 34p per each I'll look the other way.