Whilst I haven't been able to find any human-computer interface (Charachorder, TapXR, ...) or unique and repurposable musical instrument that has as much of a solution coverage as #Tetent TestCut (or #Tetent Timespy [gd0136] if looking for wearables), I'm still looking for ways to obtain a 14x17mm bounding cross section for Tetrinsic. The height of 14mm is more of a guideline where it would likely be worthwhile to do a full CAD remodel; not much point doing it if I'm only saving 1mm or so.
For starters, I thought about the loop path that I'd use if I ever did find a solution:
The dark grey is the loop and the light grey dots is the loop at a lower elevation. This allows the use of 1 long loop that can be tensioned, and means that the outer loop section doesn't have to be connected to the motor somehow.
The requirement of the loop was that it has to be able to transmit vibrations, as mentioned in the previous log.
I'm scrolling after hours of general research, about to pack up and move on, and I look at a ball-in-a-track solution one last time:I notice that the top of the track is covered, implying that the balls would just fall out if I tried having it more open to give the fingers more grip area.
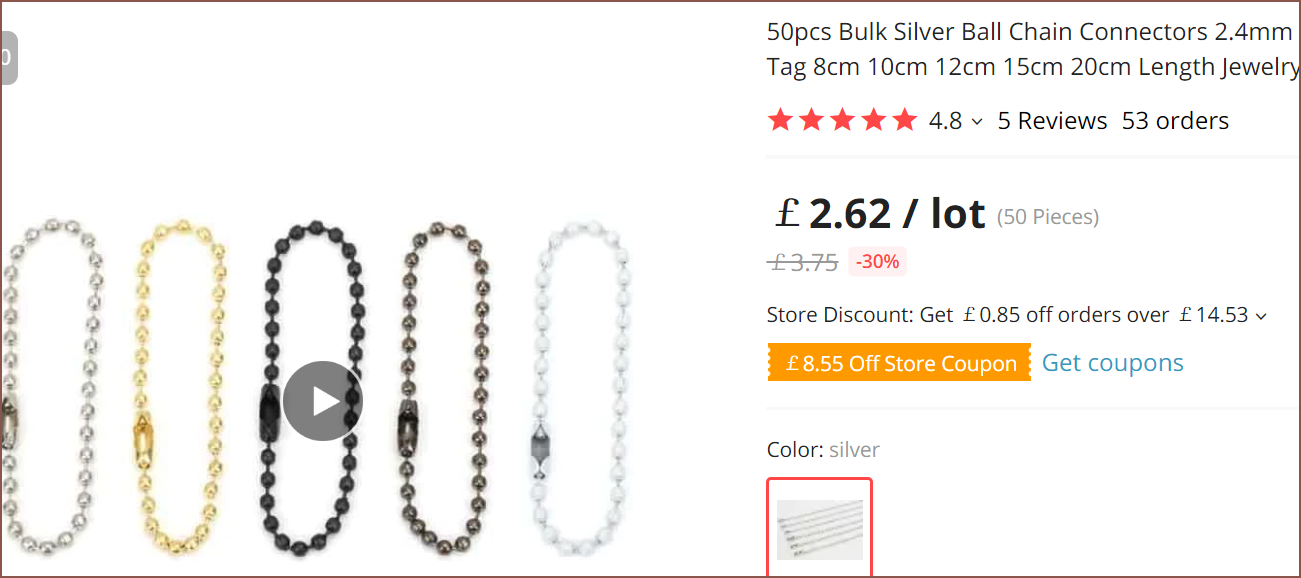
I then turned to ball chains one last time. The issue is that they have a large bead that connects the ends:However, in my Google Images search, I came across this:
and I'm like "Yes yes yes yes!" because I could use a semi-rigid loop that should be able to conduct haptic vibrations well, and I have more flexibility in chord lengths. That is, until I found out that the minimum size is 3.2mm. The motor is 11.1mm and the UMPE tape is 0.3mm. That leaves 2.6mm or so. Ok... fine, 14.5mm is probably decent enough to continue.
Now I'm on AliExpress.
It's nice to see that there indeed is a ball chain under 2.6mm and that they come in a variety of colours, unlike GT2 belts. I also think that stainless steel could look more visualy appealing (I lowkey want Tetent to get onto yankodesign, and looking through r/mechanicalkeyboards feels like looking at in-game skinpacks so it seems enthusiasts are particular about aesthetics).
The only partial concerns I have are grip and potential corrosion if the chain isn't stainless steel. These concerns mean nothing though if I can't actually find an affordable clamp and suitable chain to use it with.
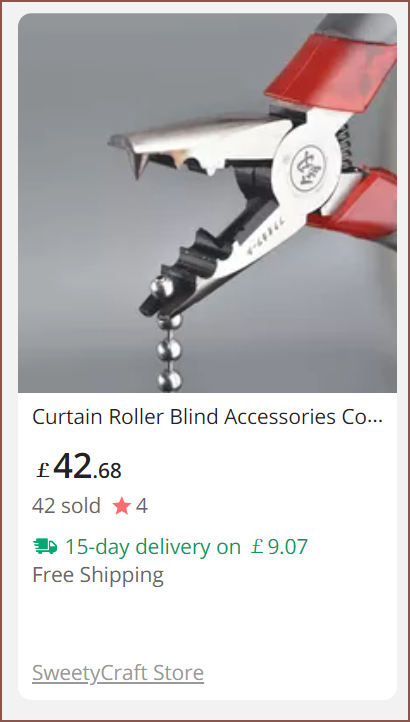
Cheapest I can find so far is £43
I found what looks to be an identical one for £60, but this one says that it works with 4.5mm ball chains which is a bit too large.I also had a feeling that joining 2 differently coloured chains could be done to have some extra fancy effects when in use:I still don't know what's with the markup though. It's bottom dollar on Alibaba:[12:00] Ok I've watched some videos and this tool looks like a wire cutter, a sharp point press and a spherical mold press all in one. For now, I'm going to assume that it'll be possible to DIY a tool for 2.4mm or smaller balls considering that it currently looks like it doesn't exist (and it'll be £££ if it did).
[17:15] Ok. Suprisingly coincidentally, I got to touch a metal ball chain for like 60 seconds. The grip seemed fine and felt quite nice.
This motivated me to visit an arts+craft store I've never been in before and they indeed had some ball chain. Unfortunately, they only had plastic, but they had it in a variety of sizes/colours so I could feel the differences and answer more questions like:
Can I still move the chain when only lightly pressing on it with Finger5? Yes
What is the ideal formation for balls across 2 rows? Square-like, as expected. The finger doesn't grip all that well in a triangular-like formation.
Could I have backlighting, getting another one for "Initial requirements" bingo? Yes.
The balls are much more see-through than GT2 belt, meaning that any underglow lighting would actually have a nice looking effect.
If I allow for additional thickness (15-17mm), I might be able to fit screens underneath.
Ideally I'd want Tetrinsic to cover as much of a solution as possible in one pass, and screens for live background effects similar to Flux Keyboard certainly have a very nice aesthetic. Aesthetic sells.
A single block colour white LED is much simpler to implement though, and could look better than seeing an off-axis TFT panel. A turned-off TFT may also look worse on an all-white Tetent build.
Could I get by with just 1 ball chain column? Yes, but 2 feels more secure.
I'm still trying to mine for a solution and I thought about having multiple concentric belt rings instead of 1 solid belt. It turns out that square cross-sectional belt exists and in a variety of lengths:
Thus I started to plan out a layout with 2mm belts, though I might also opt for 1.5mm.
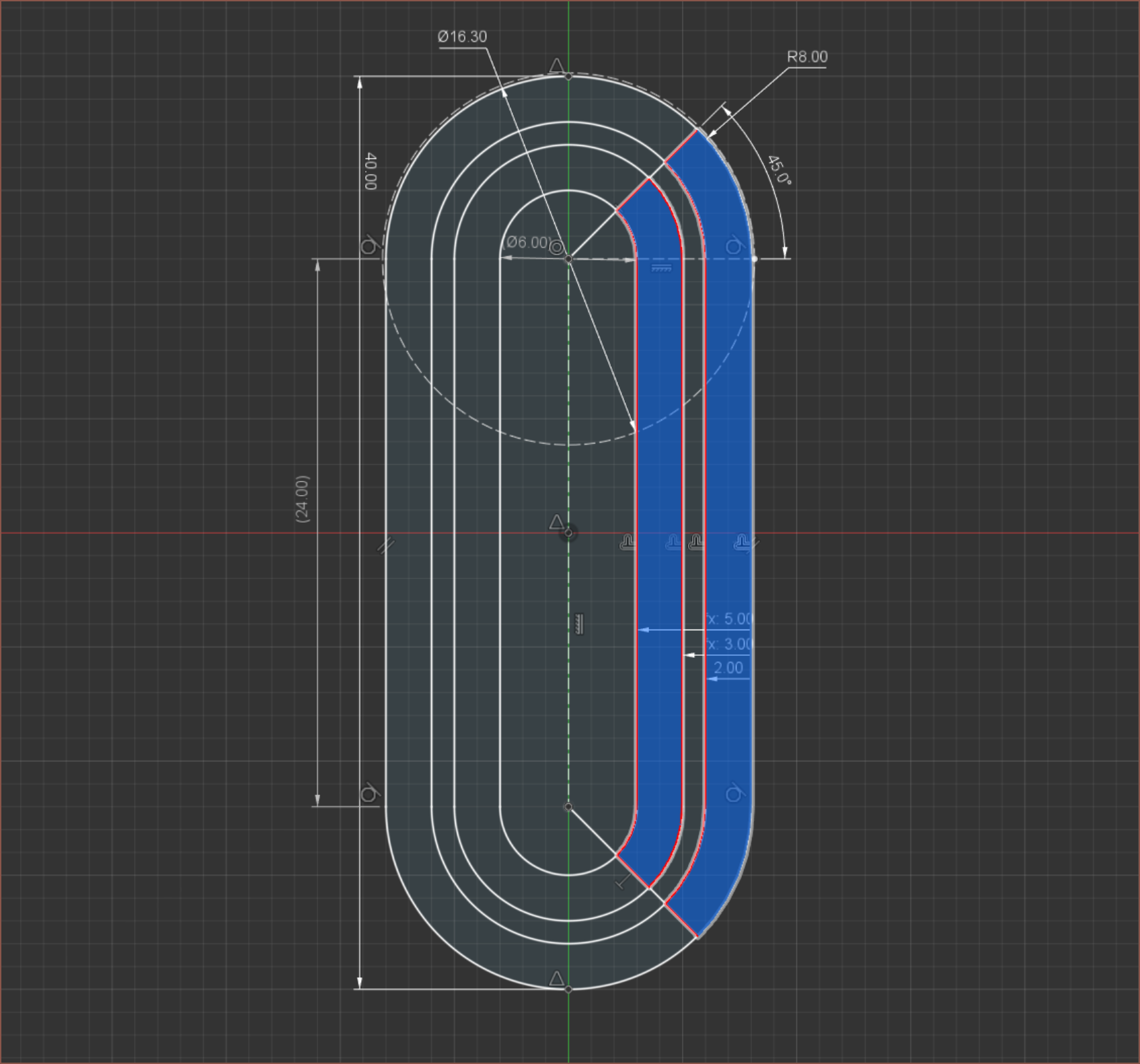
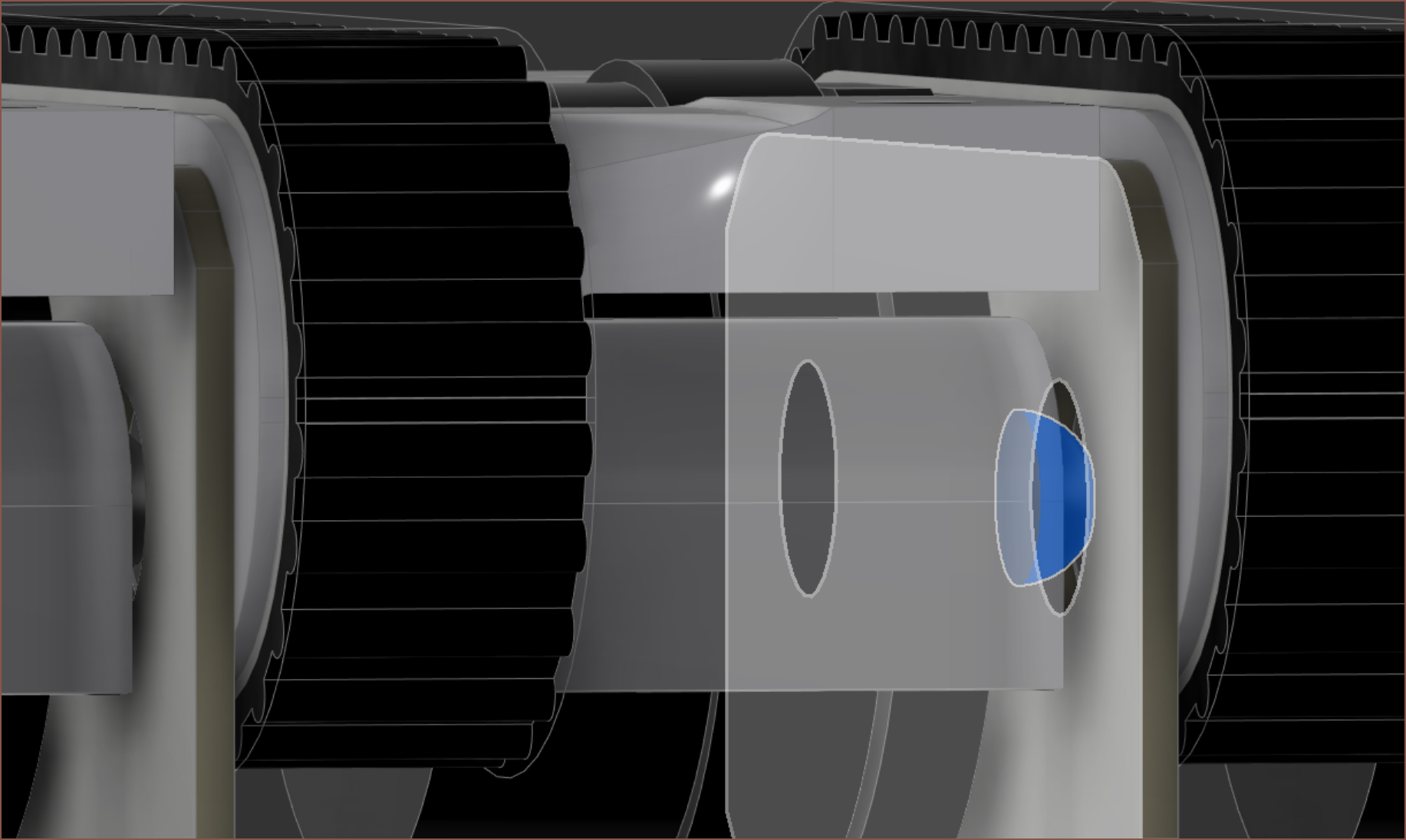
The blue section is the section of belt that is not covered by a top cover. I'm expecting the gap inbetween the belts will help keep the finger in line. I tried this with the ruler in my combination-square, which has a 3mm trench, and it does what I intend.
The bottom curve will have another pulley which houses the magnet and absolute encoder. The hope is that I'd be less hight constrained for PCB components, allowing for cheaper ADC and magnetic sensor alternatives.
My concerns with the design are
the belts slipping on the motor
the friction of the belt sliding in the highlighted section
accurately measuring the force pushing down on the highlghted section
longevity of these belts compared to fibre reinforced GT2 belts
haptic feedback vibrations being absorbed by the belt
I'm going to see what cost and space saving potential there really is before going further.
Just looked through Digikey with very loose filters and the ADC and encoder that I'm planning to use are also the cheapest that do what I need, irrespective of available PCB space. Seems Me In The Past drove a very tight Personal Best run.
Additionally, I tried Timespy with a 3mm thick plastic comb over Finger2-4 and I couldn't really feel any ergonomic benefit. I think the best case reduction in height is 5mm.
[22 Dec, 16:45]
Perhaps with more PCB space, I could opt for an RP2040 which would give me access to more programming assistance and likely has enough pins for a cheaper I2C or SPI encoder (such as what's used in Smartknob).
The main issue out of all the concerns I've highlighted is the haptic feedback vibrations being absorbed. It's unlikely that I can use rubber for this reason; it literally said on the product page that it absorbs vibrations. I believe GT2 will be fine since is fiberglass reinforced.
I've been looking into other solutions such as a track filled tightly with ball-bearing balls or small metal/printed chain, but I haven't yet found anything worthwile. I'm also thinking that I'd need to aim for 14mm of height. Even at higher thicknesses, the motor orientation switch still has merit because I'd then have the option to use a longer and more powerful motor.
I think the reason why my subconsious is weary of the current solution is because the grey zone for success is small (aka well defined). A width of 17.5mm will be well within the size to make a usable solution, and 20.5mm will have no solutions (for my hand size). That's a difference of only 3mm, half of the width of the GT2 belt.
[08:00]As expected from yesterday's measurements, the built in ribbon cable has no hope of ever reaching the PCB. The bigger issue though is that there's not enough space for an M2 bolt head. I'm unable to understand what these holes are for then. Or perhaps, these motors are cheap because there was an unnoticed design error and a new batch had to be made.
It was probably good that I, intentionally or not, waited for this motor to come in.
Worst case is that I have to recalculate my entire design to make use of that rotor bolt on the other side.
Perhaps there's enough material that I can just file it down, but it's essentially in a corner so I don't know how close to the surface the file can remove material.
I could print spacers and try adding holes into the PCB so that the bolt head doesn't interfere with adjacent Tetrinsics.
This sounds like the most straightforward option.
[E1 - 10:15]
I've modelled the changes and it works in #Tetent Timespy [gd0136] (19.5mm spacing) except for Finger5 which requires 20 - 20.5mm of spacing (I think the bolts in CAD are slightly taller than the physical ones).
I'm wearing the Timespy concept now and I think it would benefit from the move anyway. While I'm on the subject, I'm also going to move Finger5 down for better ergonomics.
I've removed the branding for the time being since the PCB keeps changing anyway
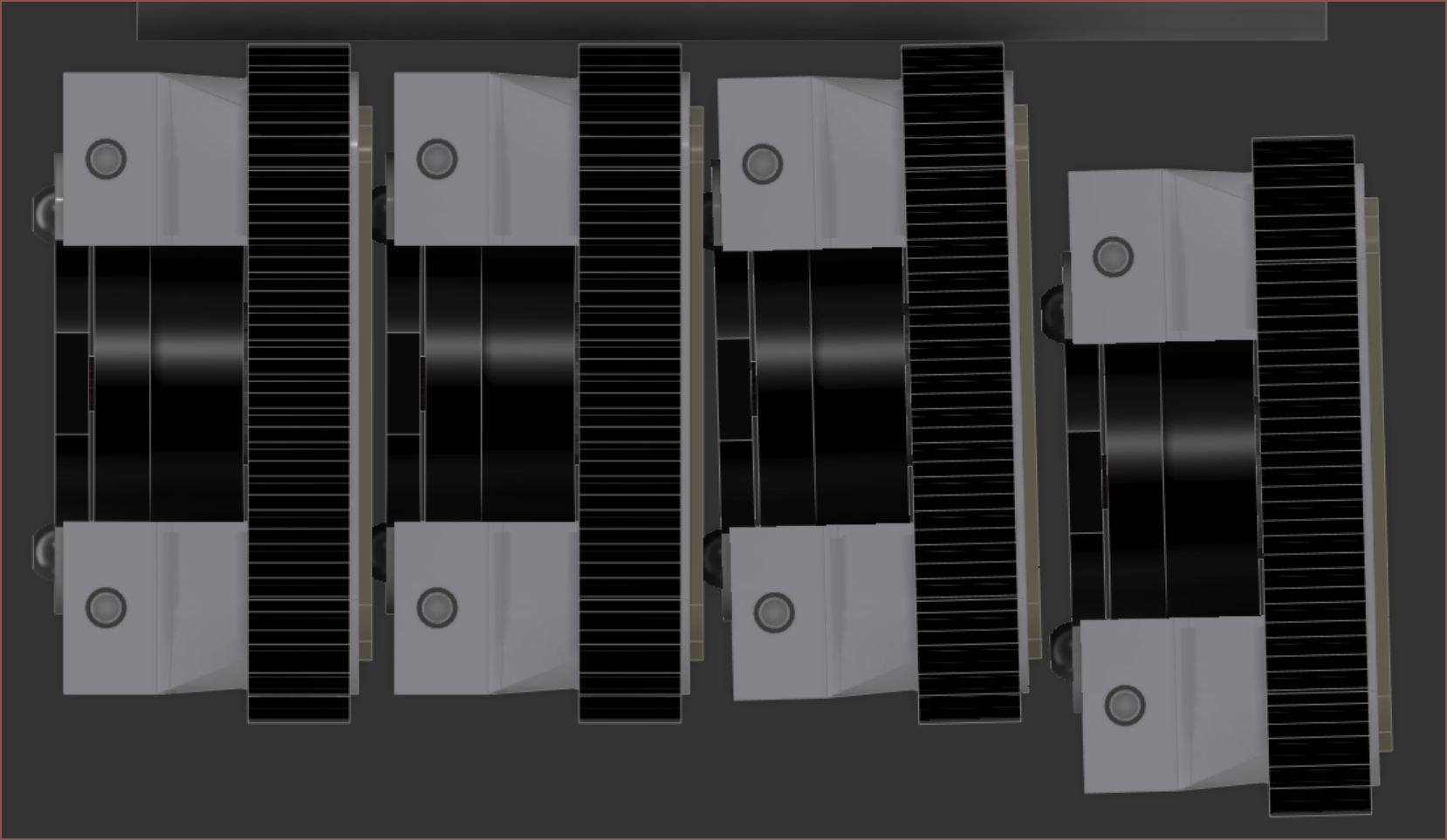
I expected this motor to be larger when I was excitingly opening packages. I've also got a 98T belt. Perhaps I should've also bought other sizes so that I could try them, but I also wanted to spend the bare minimum. At least now that I've got the motor, I can get accurate measurements and potentially even solder the flex cable straight to the board as if this was a professional product and it was by design.
The "cogging" as people in the SmartKnob project call it (the dedent feeling) is perhaps <25% of a mouse scroll wheel which itself is <25% of a Nema 17 extruder.
I think the construction of the motor is actually metal instead of black plastic. The weight is 10.0g and the belt is 0.8g. Cable pitch is 1mm and length from the edge of the main circumference is 17mm (so I'd likely have to solder an extension). The rear screw rotates with the rotor. Flat edge of the base (the one side that doesn't havea mounting hole) is 6mm. Mounting hole tabs are 4mm wide, 1mm thick. Hole is 2mm. Edge-to-edge length is 24mm.
I've sunk 5hrs into the next PCB iteration. The challenge is, as usual, to have everything connect up. I'm also routing the ground pins now. Connecting the ADC to the microcontroller and angle sensor was straightforward, but its the MP6543 motor controller that has increased the compute time. I have also checked Digikey to see if there are any new alternatives in stock that wasn't a month ago, but there were none. I'm using the LDO that's conviniently on the MP6543 so it's not like I can switch to the now-in-stock TMC6300.
I've decided to put solder pads for ribbon cables on the back side of the PCB to get more space on the front and ease assembly, and I think it was a good idea to go with.
I've also recently seen the below image and even though this is the first Tetrinsic board design, I'd still like it to look nice for my inner peace of mind.
After mining for a bunch of solutions on other projects, I'm back in this mineshaft. Now that I've got a redesigned Tetent Timespy, I know what changes I can make here that will improve both solutions. I've gone all Dynamic Island on the belt path by increasing the length from 35 to 40mm so that I can reduce the PCB height by 1mm whilst getting more PCB area that can be used for components. The belt length has also increased from using a 92mm to a more readily available 100mm belt.Sigh... now my entire PCB solution will have to be recalculated.
It's not much but it's still honest work. I've also moved the capacitors closer to the MP6543 and I've tried to make the pads somewhat large because I suspect that I'd have to actually solder some small wire.I modelled the cable of the motor from the AliExpress images and I don't think it's going to be long enough to make it all the way over. Even if it was, it doesn't seem like the easiest of things to solder since there is insulation covering the top of the pins.
Next thing to do is either make more pads for other connectors, double check the schematics to finally confirm if I'm using a 5 pin ribbon cable or something else or start learning how the M032 MCU is programmed. I could do the last option whilst waiting for the PCB and parts to arrive, so it's likely going to be one of the first two options.
So I've continued processing changes for Tetrinsic and #Tetent [gd0090], but am trying to focus on Tetrinsic for now since it's what holding back progress. My main concerns have been written in this log.
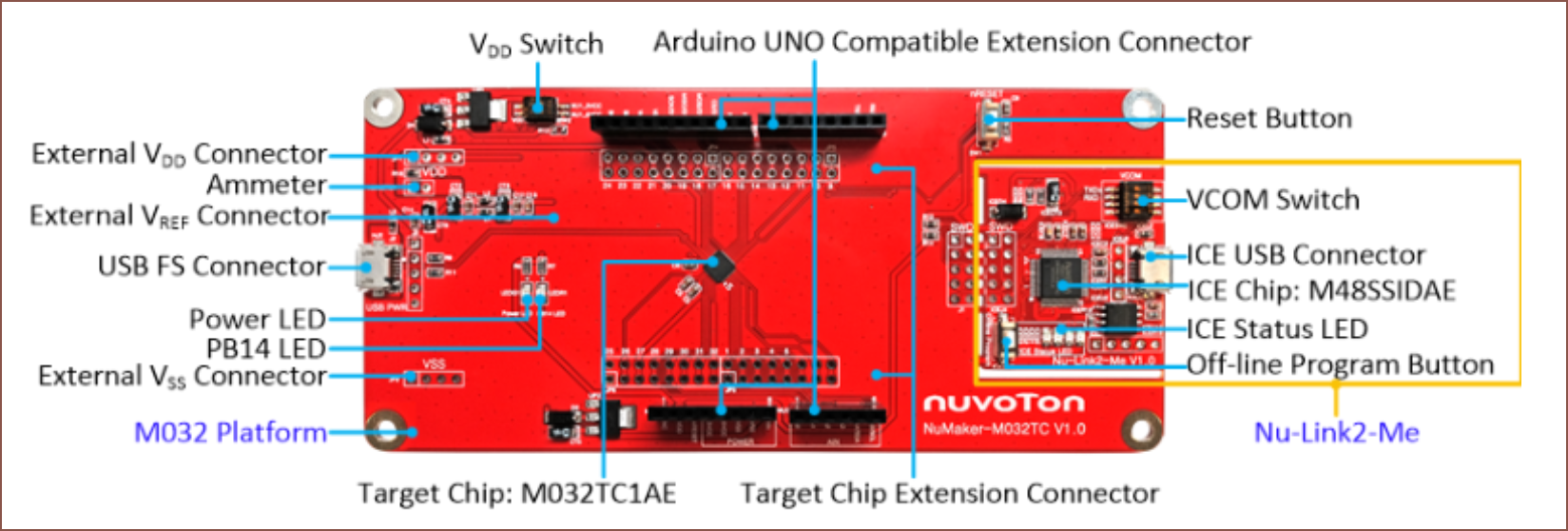
Today, I've been trying to figure out how the mcu is flashed. Apparenlty, it's via an "Nu-Link" device. I can only assume there's some kind of bootloader already on the chip so that it knows which pins are the ICE pins.
Then I was wondering how I was going to set the device addresses for I2C.
The 5 pin ribbon cable looks like this right now. There's not really much space, so I've put the USB data lines on it too and plan to not have a connection for the cable that goes to the next Tetrinsic. This way, only one Tetrinsic in a chain will have a USB connection, and this one will be the master Tetrinsic.
For addressing, my plan was to have a way to detect the resistance value between the Sense (now called Address) line and some other line, but I don't think my idea would work when there's more than 1 Tetrinsic on the lines.
Instead, I've got another idea where
The end-Tetrinsic sends 3.3V down the Address line (via soldered pad on board)
The Master Tetrinsic connects the line to ground (via soldered pad on board)
If the voltage measured on the Address pin = 0, this is the Master Tetrinsic and it uses a software defined I2C address. All others will instead opt for a dummy address.
The voltage measured on the Address pin will determine the delay before trying to connect to the Master Tetrinsic. The master Tetrinsic will give the slave Tetrinsic an address and will log that it was the n-th Tetrinsic in the chain.
In my research, I heard that there was some SMBus thing that had a feature that actually sorted out the device addresses so that there aren't conflicts, but it seems that it's only a feature in the M032xG/I chips and the USCI found in the M032TD doesn't have that feature according to my skim reading.
Oh, and me a few hours ago:
Man. There's got to be some more information, like on programming the mcu or even some more I2C knowledge...
Hm? What's a TRM? I didn't see this on the specific M032 documents page. It was just the Datasheet and nothing else.
Opens it
My face:
Now I'm really wondering just how much scope this project is going to grow into! The good news though is that I guessed correctly on what pins the USCI uses for I2C. At least Me In The Recent Past got the additional content he desired when saying that the 288 page doc wasn't detailed enough.
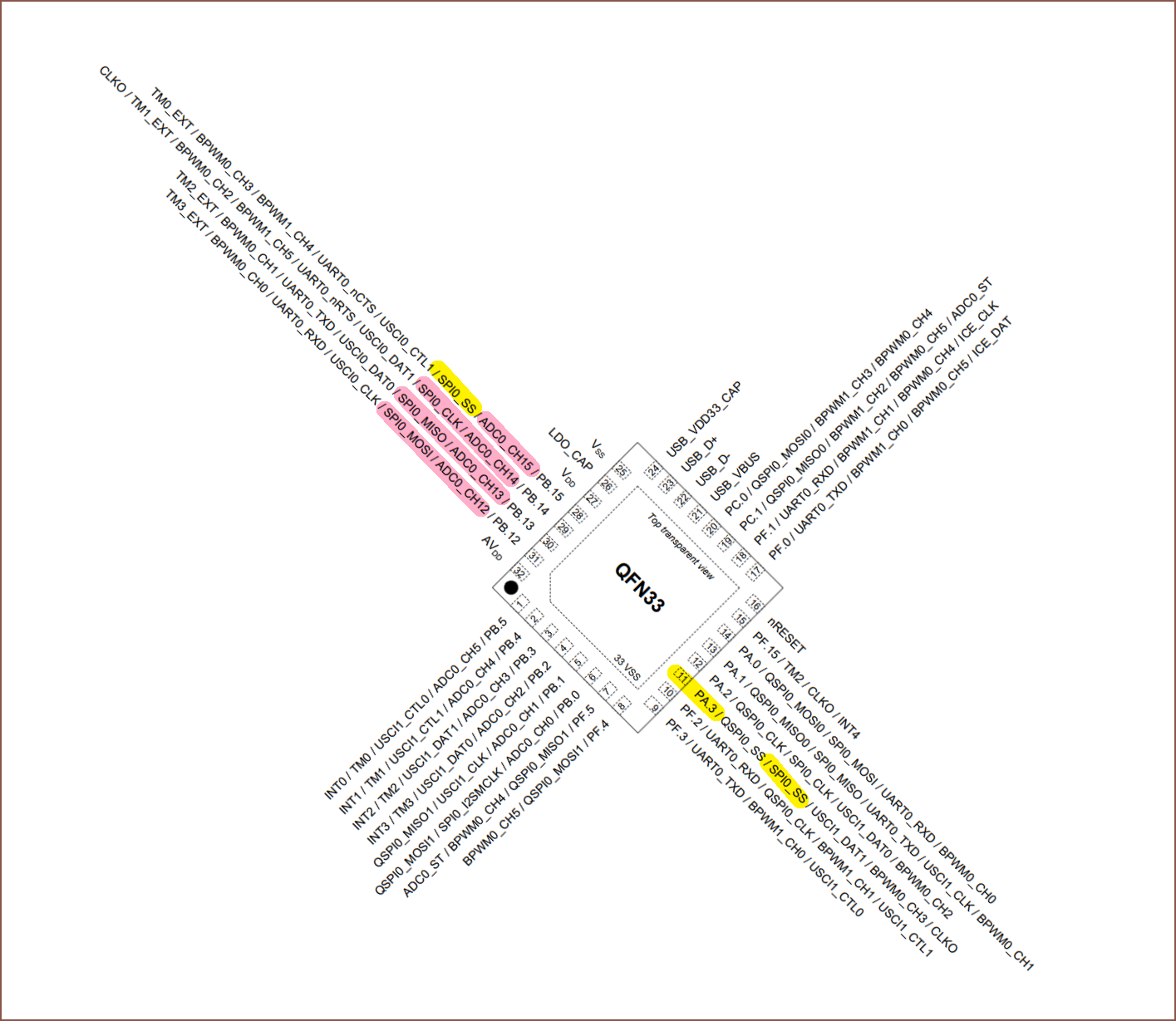
Anyway, I looked at the pins and the SPI pins take up some of the ADC pins, and I need an ADC pin for the Address signal.
Conviniently enough, there is another set of SPI0_x pins on the other side of the chip, and I'm not using Pin11 (PA.3). Therefore, I've crammed in the traces at the bottom of the board. I haven't imported the new outline yet.I'm also going to use nReset since this is the first time I'm making a microcontroller board and I don't really want to risk adding any hurdles that could've been avoided.
Since I had the space, I've added a 1u bypass capacitor.
I've also made all the silkscreen text bigger, as I still have to keep in mind the actual scale of this board.
Now that I knew I needed to make sure I had spaces for the vias under U1 (the microcontroller), I (eventually) deleted most of the traces and started rerouting a new solution. I've also used 0.2mm traces as default instead of 0.16 and it was still mostly routable. I've also tried to use 0.6mm vias where possible.
I've removed the USB related resistors and added a recommended 0.1u capacitor for U1.
I have also found a nice looking pad design for C0402s, used these recommended values for 0402 components and then made a similar one for 0603s. The silkscreen is much cleaner now. I should also note that I've made sure that the IC text is facing up for all components (which is the reason U2 is rotated 90 degrees).
Next time, I need to start thinking about creating some FPC pads so that I know the limits before I finish routing the remaining MP6543 pins.
I've spent another 2.5 hours in easyeda and the datasheet and I think I've got a pinout that will do what I want it to. I've used USCI1_CLK and USCI1_DAT0 as Clock and Data respectively, which is just an educated guess since the datasheet doesn't specify what pins are actually used for the I2C configuration. Additionally, the "ICE" pins are the chips debug pins, so it's probably a good idea to add those in.
I've also started to rip 'n' tear out the traces I've made so that I could move the MCU up high enough to comfortably fit vias on the bottom side.
This is the reason why Pin11 is NC. There's not enough space for a via. Additionally, Pin15 is not a BPWM (Basic PWM, but it seems like an enhanced version of "PWM" found on the M031 when quickly skimming over the datasheet) pin, so I couldn't use that for anything. Conviniently, I still have enough prins to connect everything I need.
I still find it a bit suprising that, if I'm understanding the datasheet correctly, there isn't really all that much stuff I need to add an entire microcontroller to the circuit. I did a bit of looking, and the evaluation board for the 32K flash version looks pretty sparce:It really looks like the chip and 3 capacitors is all that's needed for most operations.
I can't find any schematic though. However, I can see that the 2 USB data lines seem to be length matched.
Still though, it's strange to think that a 288 page datasheet actually seems a bit lacking in detail.
 kelvinA
kelvinA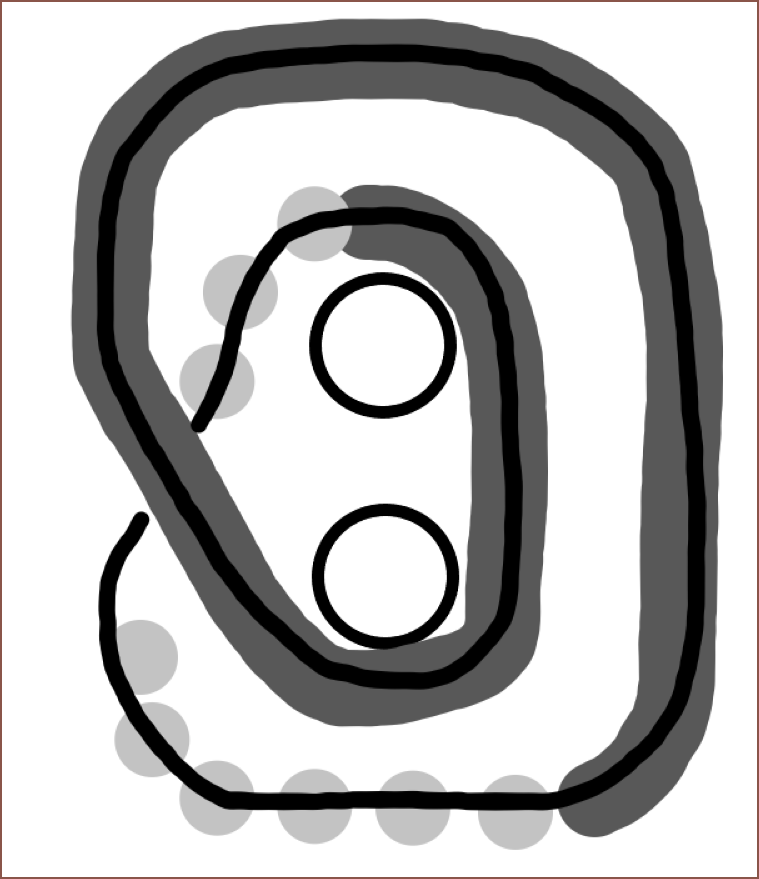 The dark grey is the loop and the light grey dots is the loop at a lower elevation. This allows the use of 1 long loop that can be tensioned, and means that the outer loop section doesn't have to be connected to the motor somehow.
The dark grey is the loop and the light grey dots is the loop at a lower elevation. This allows the use of 1 long loop that can be tensioned, and means that the outer loop section doesn't have to be connected to the motor somehow. I notice that the top of the track is covered, implying that the balls would just fall out if I tried having it more open to give the fingers more grip area.
I notice that the top of the track is covered, implying that the balls would just fall out if I tried having it more open to give the fingers more grip area.  However, in my Google Images search, I came across this:
However, in my Google Images search, I came across this:


 It's nice to see that there indeed is a ball chain under 2.6mm and that they come in a variety of colours, unlike GT2 belts.
It's nice to see that there indeed is a ball chain under 2.6mm and that they come in a variety of colours, unlike GT2 belts.
 I found what looks to be an identical one for £60, but this one says that it works with 4.5mm ball chains which is a bit too large.
I found what looks to be an identical one for £60, but this one says that it works with 4.5mm ball chains which is a bit too large.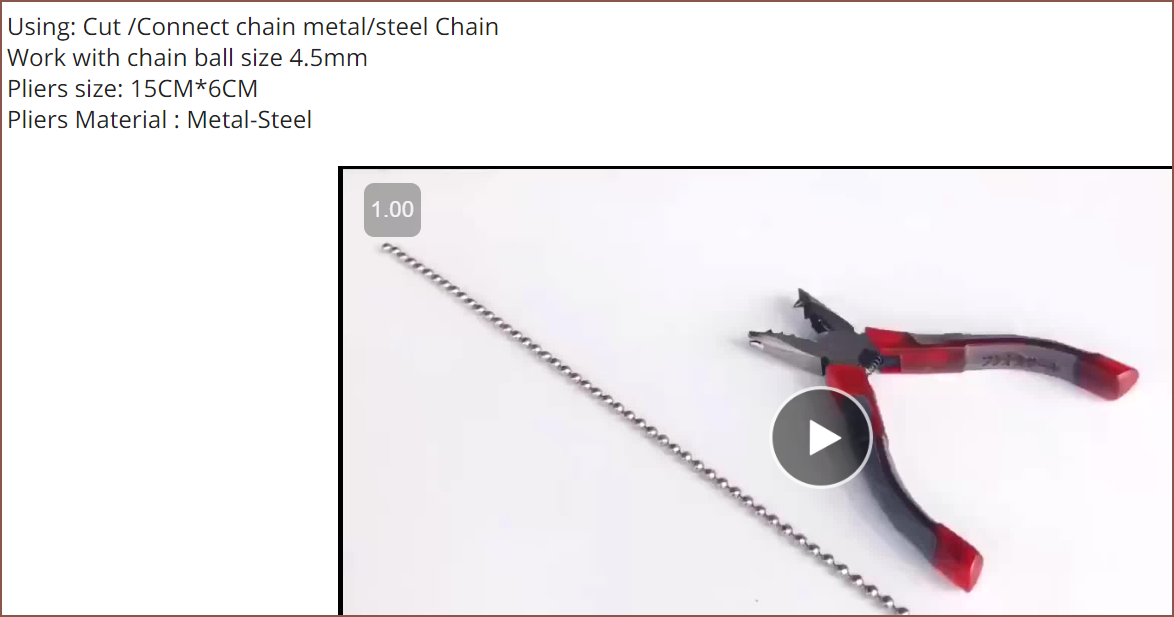 I also had a feeling that joining 2 differently coloured chains could be done to have some extra fancy effects when in use:
I also had a feeling that joining 2 differently coloured chains could be done to have some extra fancy effects when in use: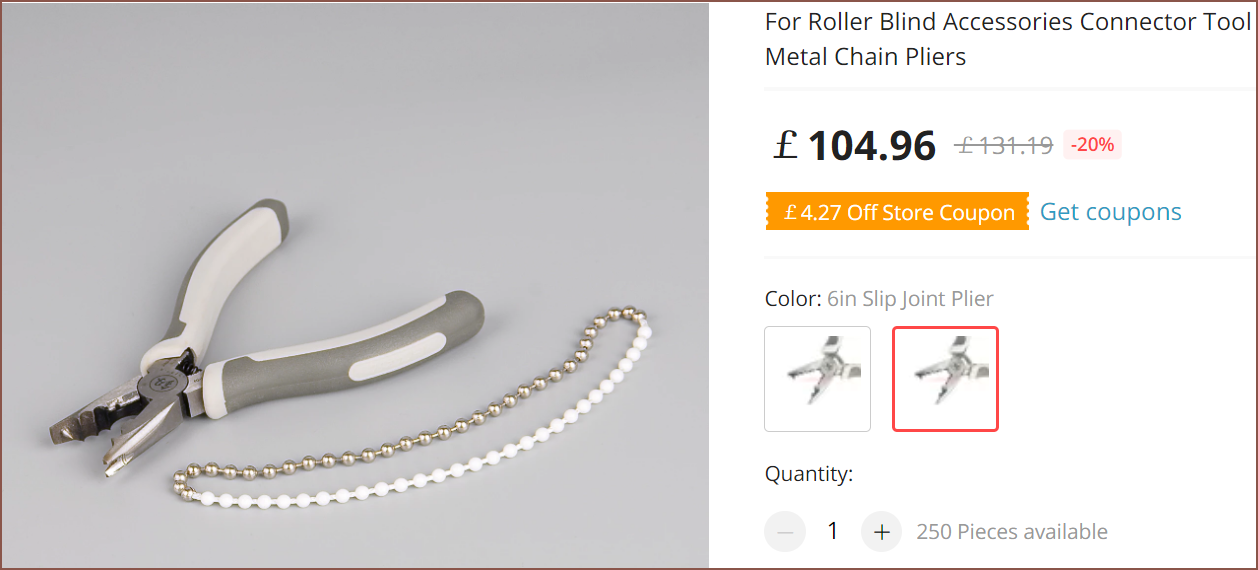 I still don't know what's with the markup though. It's bottom dollar on Alibaba:
I still don't know what's with the markup though. It's bottom dollar on Alibaba: [12:00] Ok I've watched some videos and this tool looks like a wire cutter, a sharp point press and a spherical mold press all in one. For now, I'm going to assume that it'll be possible to DIY a tool for 2.4mm or smaller balls considering that it currently looks like it doesn't exist (and it'll be £££ if it did).
[12:00] Ok I've watched some videos and this tool looks like a wire cutter, a sharp point press and a spherical mold press all in one. For now, I'm going to assume that it'll be possible to DIY a tool for 2.4mm or smaller balls considering that it currently looks like it doesn't exist (and it'll be £££ if it did).
 The blue section is the section of belt that is not covered by a top cover. I'm expecting the gap inbetween the belts will help keep the finger in line. I tried this with the ruler in my combination-square, which has a 3mm trench, and it does what I intend.
The blue section is the section of belt that is not covered by a top cover. I'm expecting the gap inbetween the belts will help keep the finger in line. I tried this with the ruler in my combination-square, which has a 3mm trench, and it does what I intend.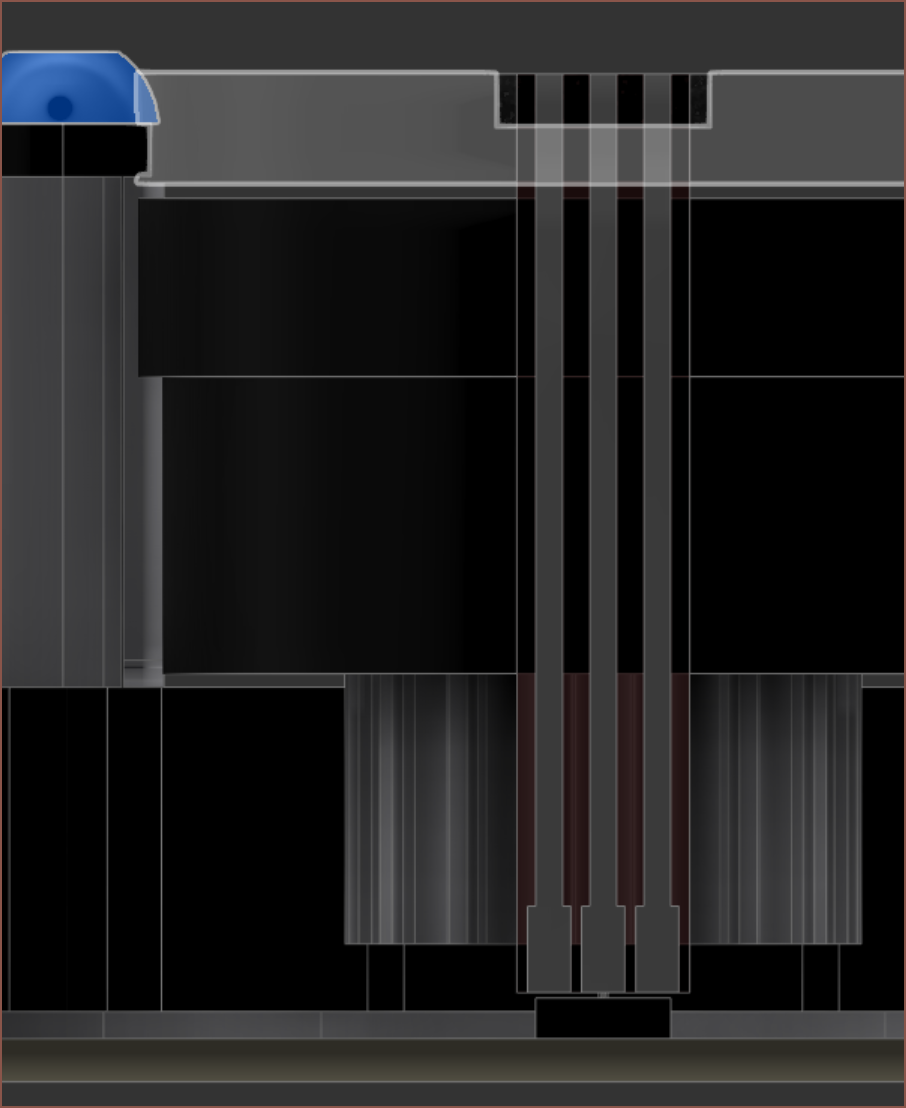 As expected from yesterday's measurements, the built in ribbon cable has no hope of ever reaching the PCB. The bigger issue though is that there's not enough space for an M2 bolt head. I'm unable to understand what these holes are for then. Or perhaps, these motors are cheap because there was an unnoticed design error and a new batch had to be made.
As expected from yesterday's measurements, the built in ribbon cable has no hope of ever reaching the PCB. The bigger issue though is that there's not enough space for an M2 bolt head. I'm unable to understand what these holes are for then. Or perhaps, these motors are cheap because there was an unnoticed design error and a new batch had to be made. 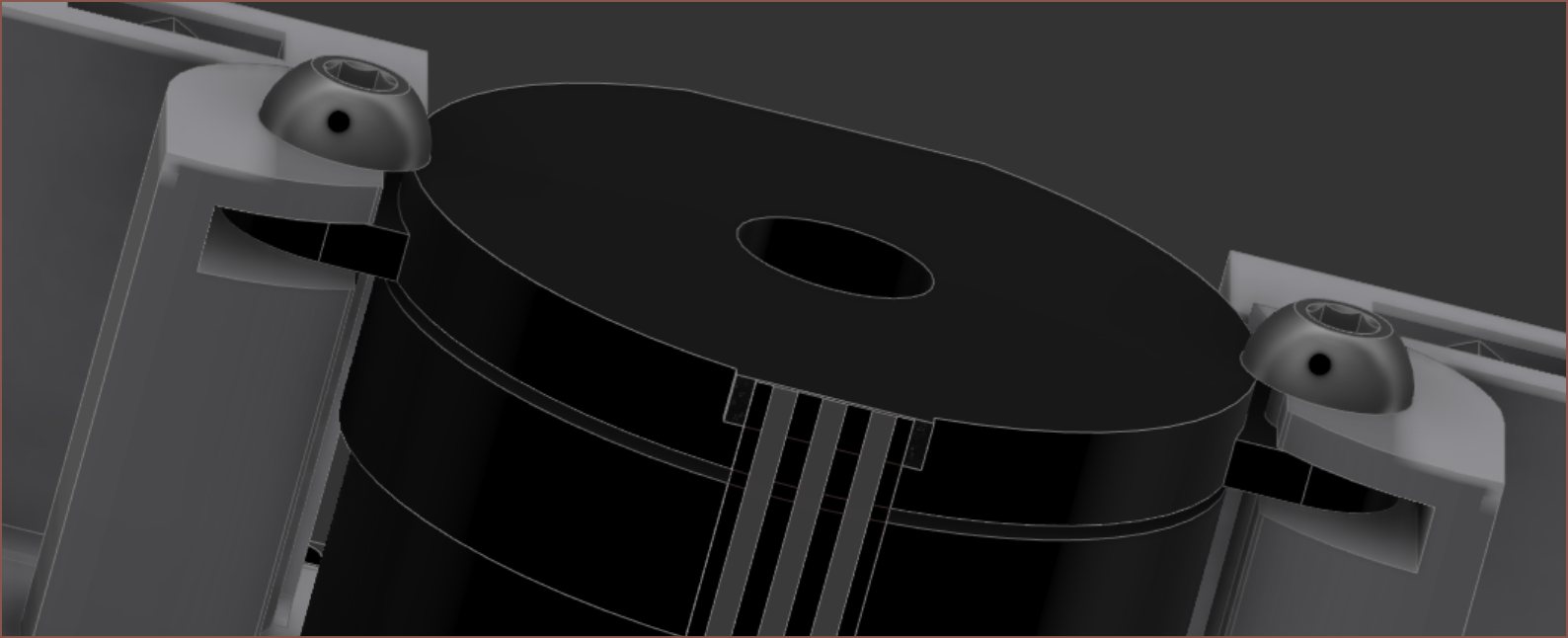
 I'm wearing the Timespy concept now and I think it would benefit from the move anyway. While I'm on the subject, I'm also going to move Finger5 down for better ergonomics.
I'm wearing the Timespy concept now and I think it would benefit from the move anyway. While I'm on the subject, I'm also going to move Finger5 down for better ergonomics. I expected this motor to be larger when I was excitingly opening packages. I've also got a 98T belt. Perhaps I should've also bought other sizes so that I could try them, but I also wanted to spend the bare minimum. At least now that I've got the motor, I can get accurate measurements and potentially even solder the flex cable straight to the board as if this was a professional product and it was by design.
I expected this motor to be larger when I was excitingly opening packages. I've also got a 98T belt. Perhaps I should've also bought other sizes so that I could try them, but I also wanted to spend the bare minimum. At least now that I've got the motor, I can get accurate measurements and potentially even solder the flex cable straight to the board as if this was a professional product and it was by design.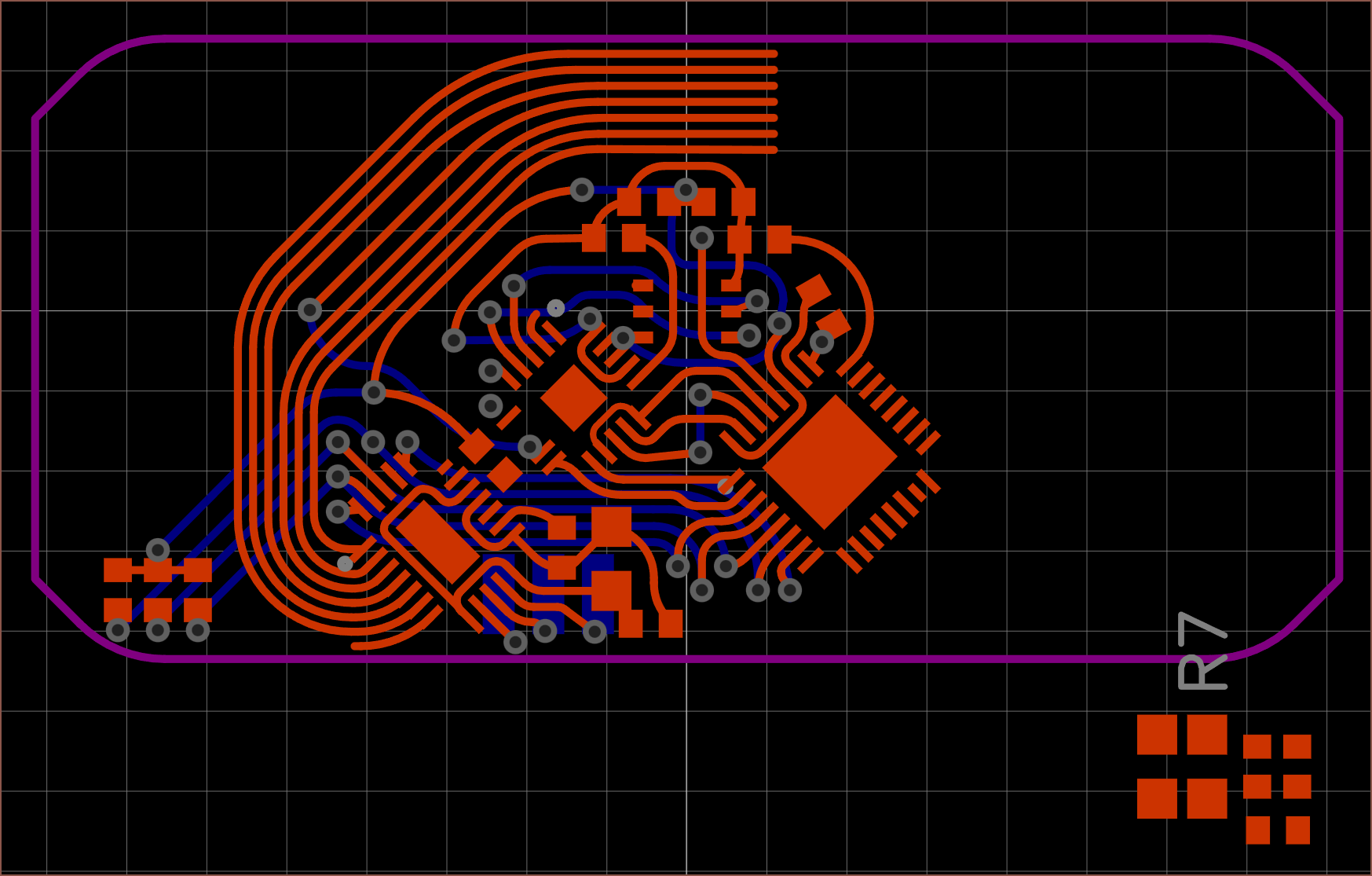 I've sunk 5hrs into the next PCB iteration. The challenge is, as usual, to have everything connect up. I'm also routing the ground pins now. Connecting the ADC to the microcontroller and angle sensor was straightforward, but its the MP6543 motor controller that has increased the compute time. I have also checked Digikey to see if there are any new alternatives in stock that wasn't a month ago, but there were none. I'm using the LDO that's conviniently on the MP6543 so it's not like I can switch to the now-in-stock TMC6300.
I've sunk 5hrs into the next PCB iteration. The challenge is, as usual, to have everything connect up. I'm also routing the ground pins now. Connecting the ADC to the microcontroller and angle sensor was straightforward, but its the MP6543 motor controller that has increased the compute time. I have also checked Digikey to see if there are any new alternatives in stock that wasn't a month ago, but there were none. I'm using the LDO that's conviniently on the MP6543 so it's not like I can switch to the now-in-stock TMC6300.
 After mining for a bunch of solutions on other projects, I'm back in this mineshaft. Now that I've got a
After mining for a bunch of solutions on other projects, I'm back in this mineshaft. Now that I've got a 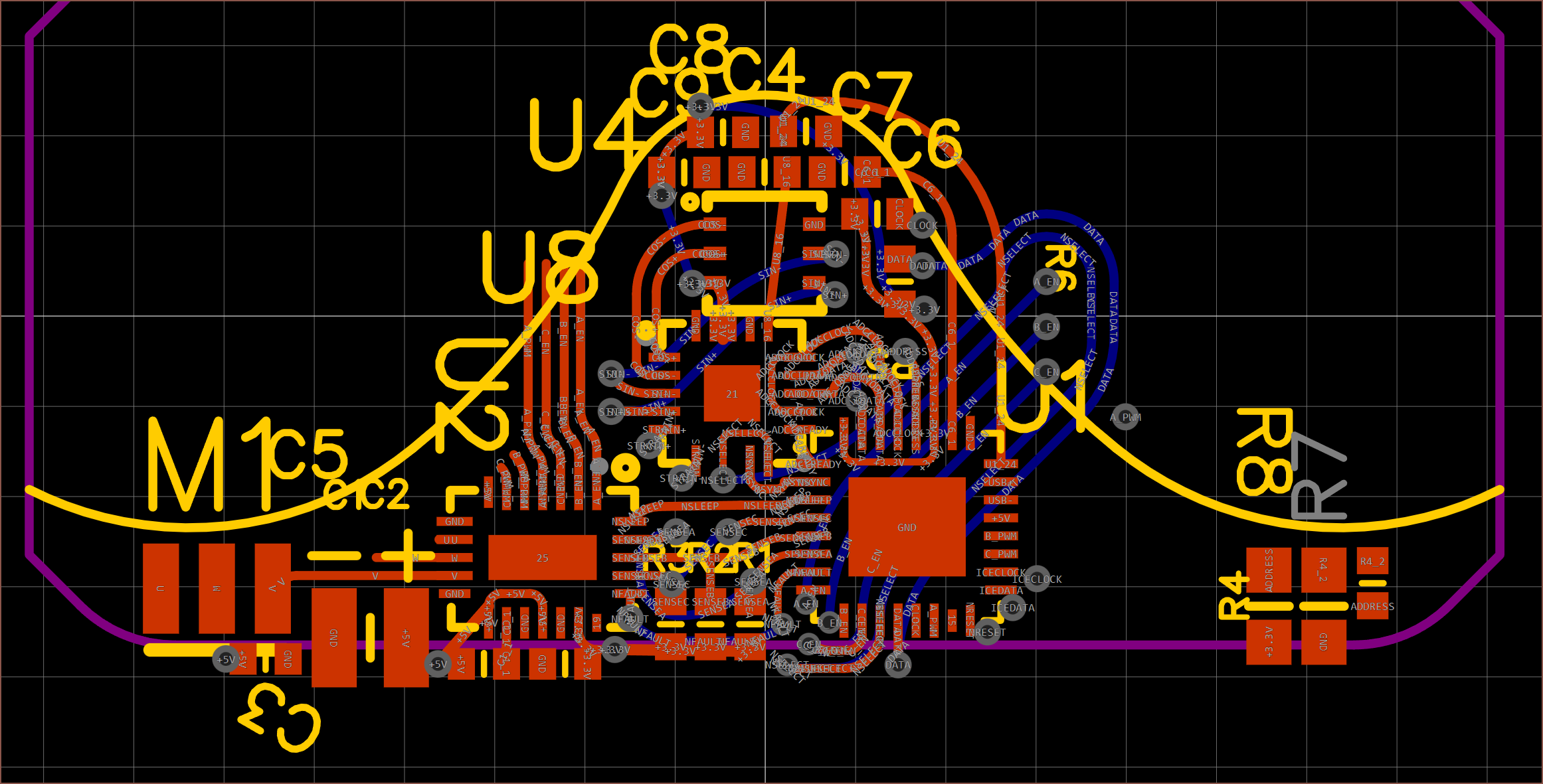 Sigh... now my entire PCB solution will have to be recalculated.
Sigh... now my entire PCB solution will have to be recalculated.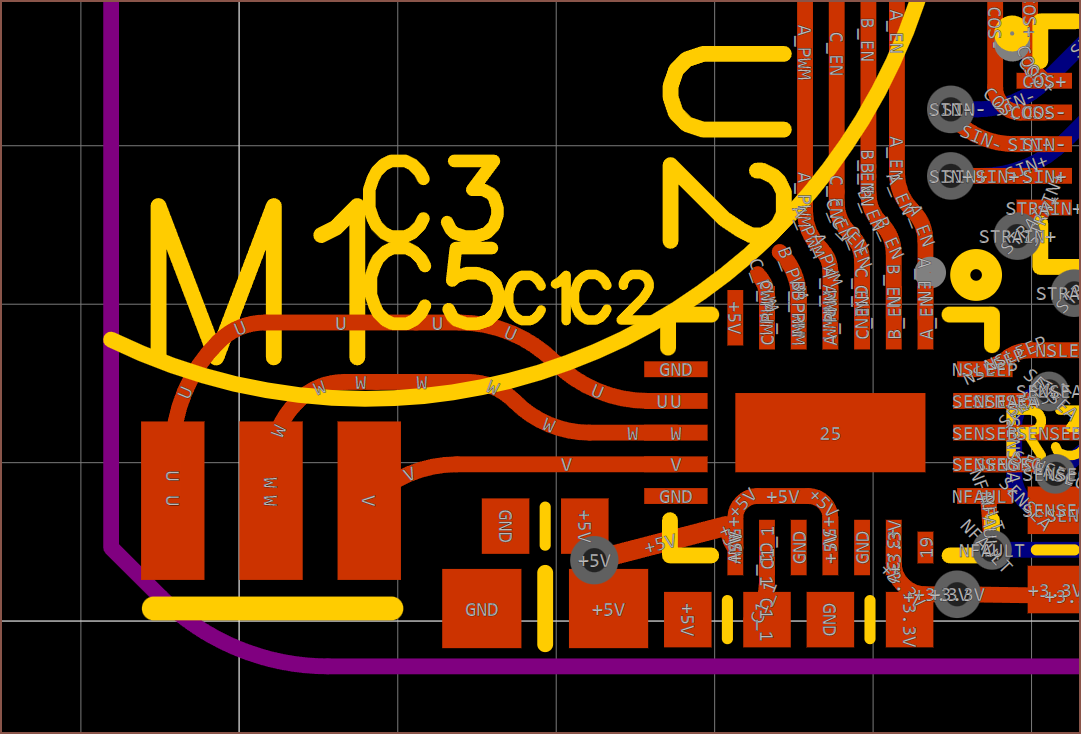 It's not much but it's still honest work. I've also moved the capacitors closer to the MP6543 and I've tried to make the pads somewhat large because I suspect that I'd have to actually solder some small wire.
It's not much but it's still honest work. I've also moved the capacitors closer to the MP6543 and I've tried to make the pads somewhat large because I suspect that I'd have to actually solder some small wire.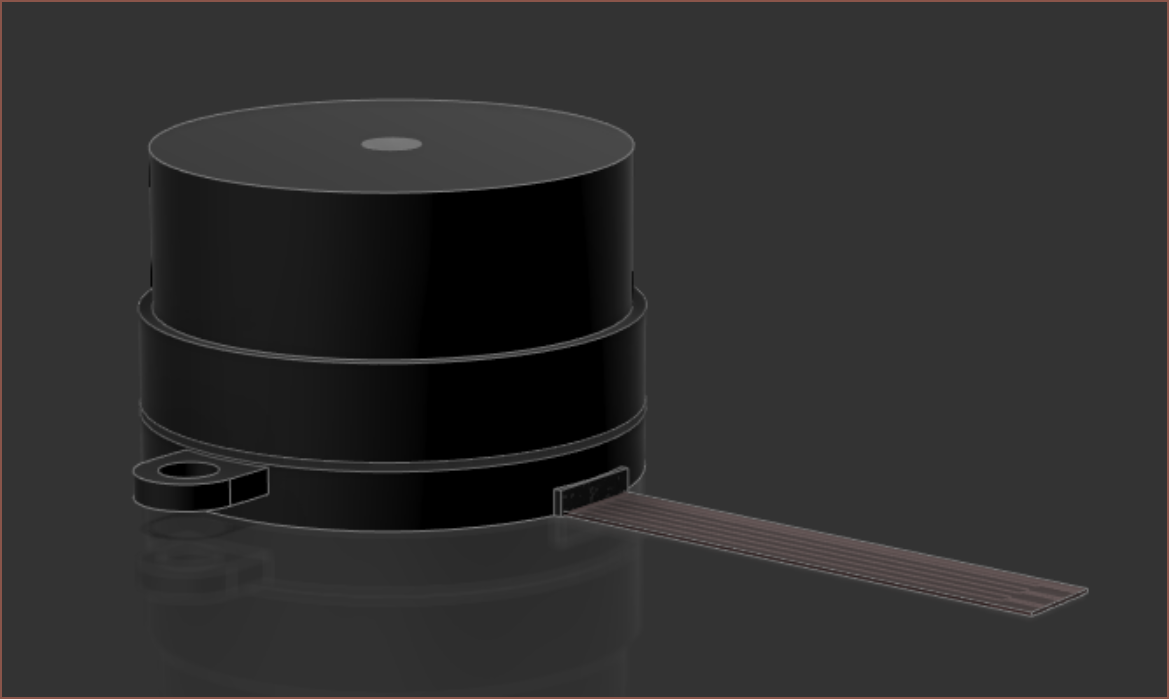 I modelled the cable of the motor from the AliExpress images and I don't think it's going to be long enough to make it all the way over. Even if it was, it doesn't seem like the easiest of things to solder since there is insulation covering the top of the pins.
I modelled the cable of the motor from the AliExpress images and I don't think it's going to be long enough to make it all the way over. Even if it was, it doesn't seem like the easiest of things to solder since there is insulation covering the top of the pins. The 5 pin ribbon cable looks like this right now. There's not really much space, so I've put the USB data lines on it too and plan to not have a connection for the cable that goes to the next Tetrinsic. This way, only one Tetrinsic in a chain will have a USB connection, and this one will be the master Tetrinsic.
The 5 pin ribbon cable looks like this right now. There's not really much space, so I've put the USB data lines on it too and plan to not have a connection for the cable that goes to the next Tetrinsic. This way, only one Tetrinsic in a chain will have a USB connection, and this one will be the master Tetrinsic. 
 Conviniently enough, there is another set of SPI0_x pins on the other side of the chip, and I'm not using Pin11 (PA.3). Therefore, I've crammed in the traces at the bottom of the board. I haven't imported the new outline yet.
Conviniently enough, there is another set of SPI0_x pins on the other side of the chip, and I'm not using Pin11 (PA.3). Therefore, I've crammed in the traces at the bottom of the board. I haven't imported the new outline yet.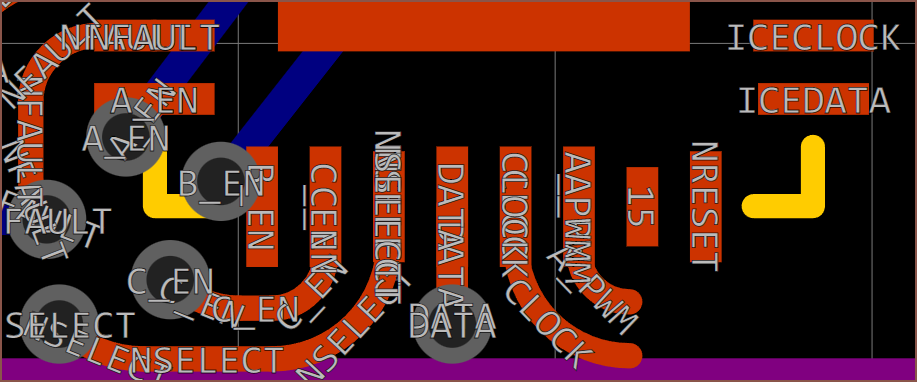 I'm also going to use nReset since this is the first time I'm making a microcontroller board and I don't really want to risk adding any hurdles that could've been avoided.
I'm also going to use nReset since this is the first time I'm making a microcontroller board and I don't really want to risk adding any hurdles that could've been avoided.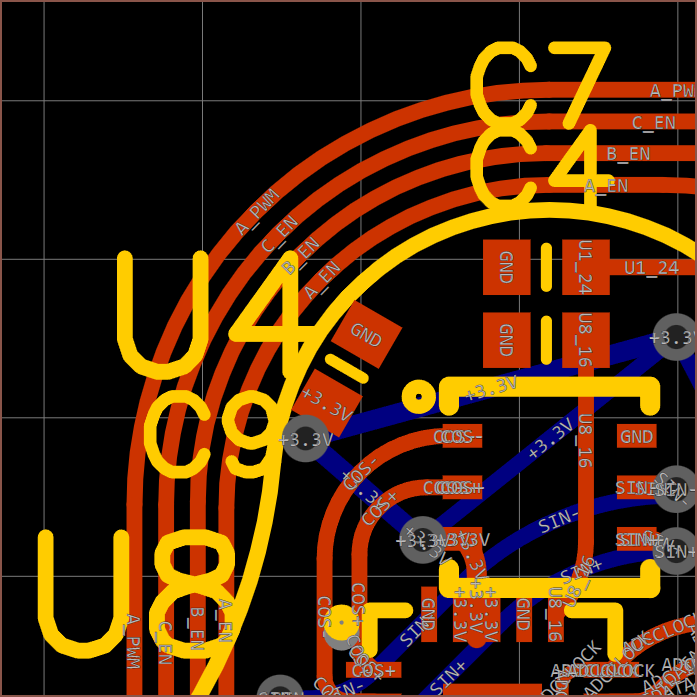 I've also made all the silkscreen text bigger, as I still have to keep in mind the actual scale of this board.
I've also made all the silkscreen text bigger, as I still have to keep in mind the actual scale of this board.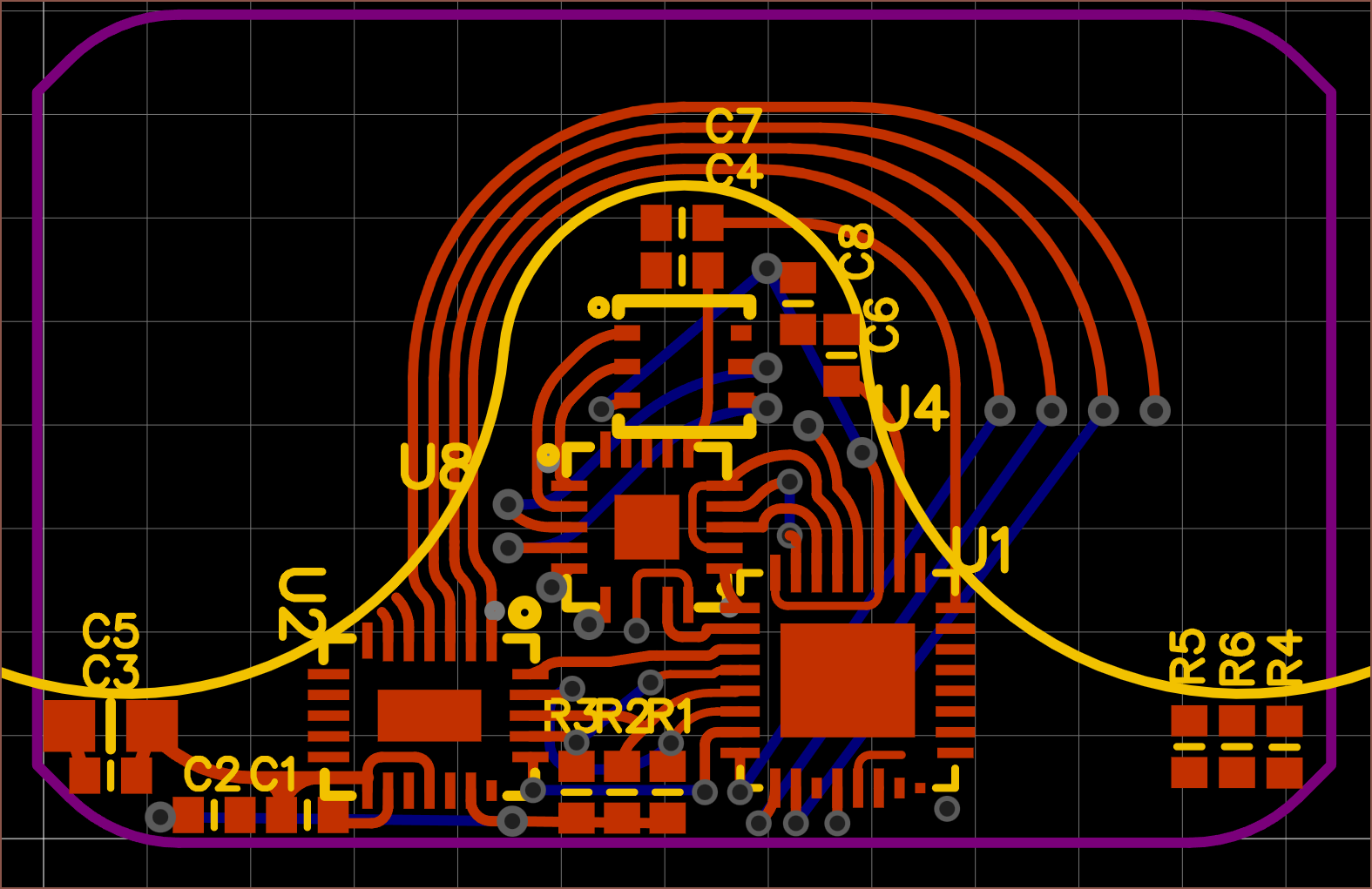 Now that I knew I needed to make sure I had spaces for the vias under U1 (the microcontroller), I (eventually) deleted most of the traces and started rerouting a new solution. I've also used 0.2mm traces as default instead of 0.16 and it was still mostly routable. I've also tried to use 0.6mm vias where possible.
Now that I knew I needed to make sure I had spaces for the vias under U1 (the microcontroller), I (eventually) deleted most of the traces and started rerouting a new solution. I've also used 0.2mm traces as default instead of 0.16 and it was still mostly routable. I've also tried to use 0.6mm vias where possible.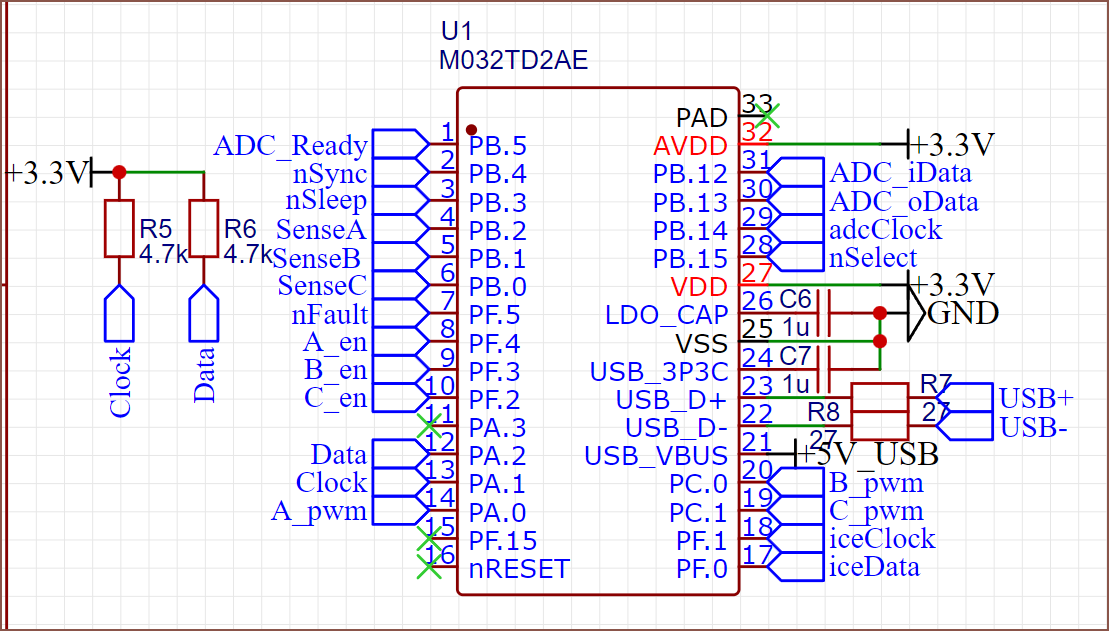 I've spent another 2.5 hours in easyeda and the datasheet and I think I've got a pinout that will do what I want it to. I've used USCI1_CLK and USCI1_DAT0 as Clock and Data respectively, which is just an educated guess since the datasheet doesn't specify what pins are actually used for the I2C configuration. Additionally, the "ICE" pins are the chips debug pins, so it's probably a good idea to add those in.
I've spent another 2.5 hours in easyeda and the datasheet and I think I've got a pinout that will do what I want it to. I've used USCI1_CLK and USCI1_DAT0 as Clock and Data respectively, which is just an educated guess since the datasheet doesn't specify what pins are actually used for the I2C configuration. Additionally, the "ICE" pins are the chips debug pins, so it's probably a good idea to add those in.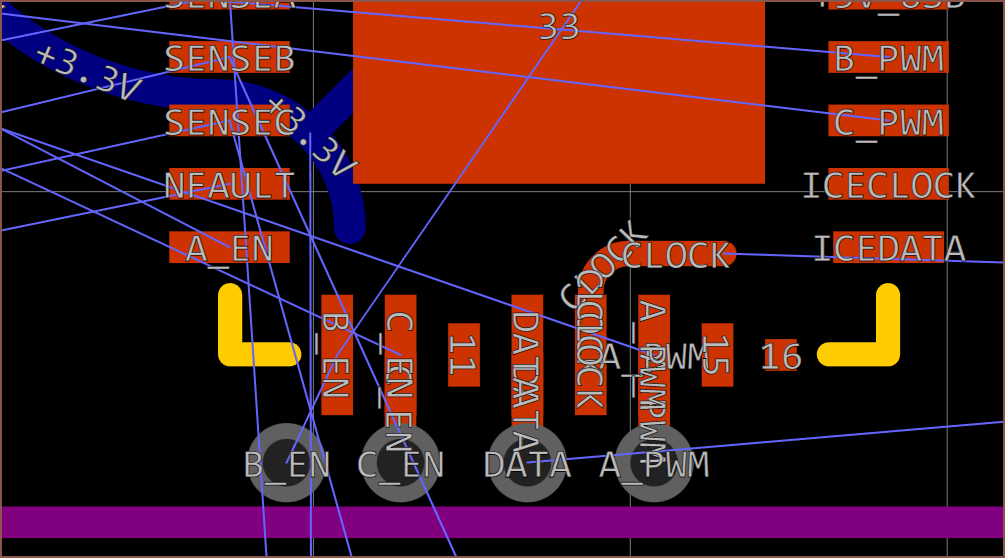 This is the reason why Pin11 is NC. There's not enough space for a via. Additionally, Pin15 is not a BPWM (Basic PWM, but it seems like an enhanced version of "PWM" found on the M031 when quickly skimming over the datasheet) pin, so I couldn't use that for anything. Conviniently, I still have enough prins to connect everything I need.
This is the reason why Pin11 is NC. There's not enough space for a via. Additionally, Pin15 is not a BPWM (Basic PWM, but it seems like an enhanced version of "PWM" found on the M031 when quickly skimming over the datasheet) pin, so I couldn't use that for anything. Conviniently, I still have enough prins to connect everything I need. It really looks like the chip and 3 capacitors is all that's needed for most operations.
It really looks like the chip and 3 capacitors is all that's needed for most operations.