I have a new video on the RR1 rev. 2 robotic arm. I show in the video how to replace the gearbox on the elbow joint. Since the gearbox is located practically in the middle of the robot, I have to disassemble and reassemble a lot. In addition to replacing the gearbox itself, the video shows a fairly significant part of the overall design of the RR1 robot and its assembly. The gearbox itself confirmed the hypothesis that the gearbox, or rather its main bearing of its own production, where steel balls are inserted between the printed rings with grooves (see one of the previous videos), does not run completely smoothly. The replacement gearbox uses a standard thin-walled bearing (61816 bearing, outer=100mm, inner=80mm, height=11mm) instead of my custom-built bearing. With the new gearbox, the movement of the robot in the elbow joint is much smoother, see for yourself at the end of the video!
I advertise everywhere that the RR1 robotic arm uses split-ring planetary gearboxes that provide very high reduction ratio. But what is the theory behind these high numbers?
The video below shows how to calculate the reduction ratio of the split ring planetary gear box. It provides very deep insight in how this type of gearbox works. I recommend to watch the video carefully and calculate in sync with my commentary.
I believe the video explains where the high reduction ratios come from. English subtitles are provided.
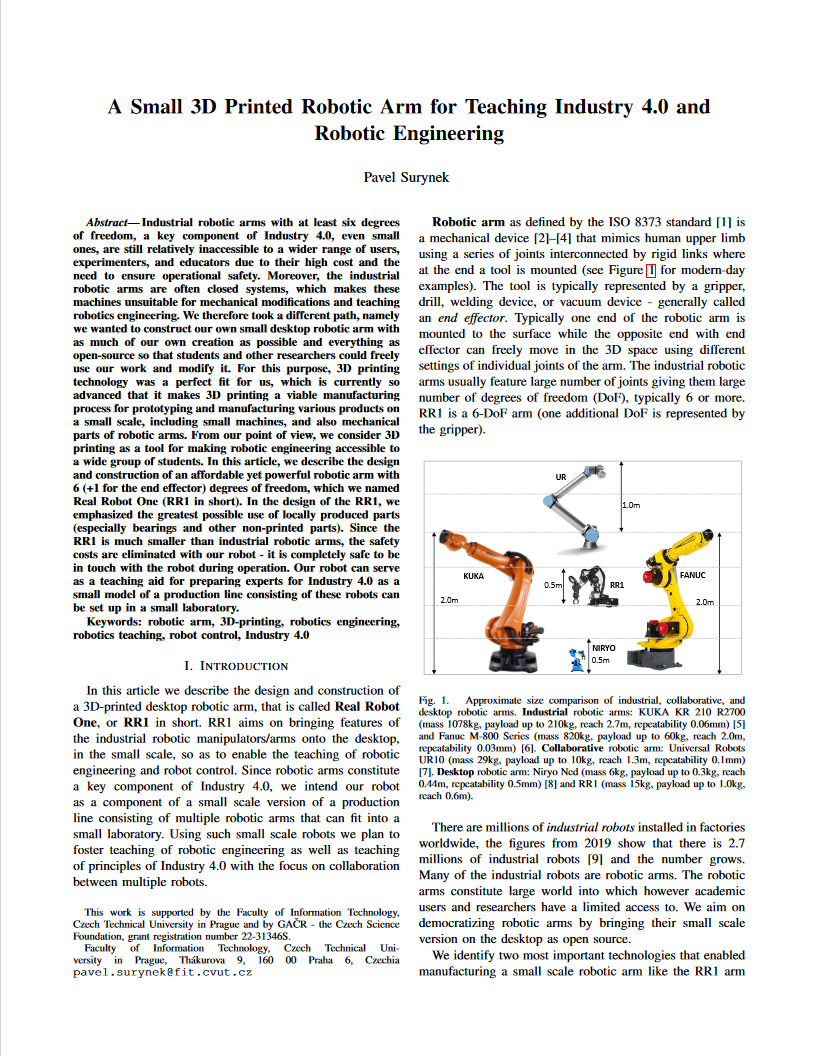
I am proud to share that my paper on the development of the RR1 robotic arm and its use in robotics education projects at my university has been published at the IEEE CASE 2024 conference in Bari, Italy.
The paper briefly addresses the construction of the robot using 3D printing and the role of the robot in teaching of motion planning and multi-robot motion planning. Major focus of the paper is on building a concepts of Industry 4.0 consisting of small desktop robotic arms and other robots. Using small robotic arms enables to integrate everything in a small laboratory without additional safety measures that would be needed for large industrial robots. Integration of the RR1 robot in student projects is discussed as well.
IEEE CASE 2024 is a flagship conference of the Robotic and Automation Society, the major international automation conference. This year the conference reached the milestone of 1000 attendees.
I have made a version of gearboxes for shoulder and elbow joints that feature thin wall bearings 61818 and 61816 respectively (sometimes denoted 6818 and 6816) instead of 3D-printed bearing with metal balls inserted between two grooves.
 Pavel Surynek
Pavel Surynek