 Nasser
Nasser
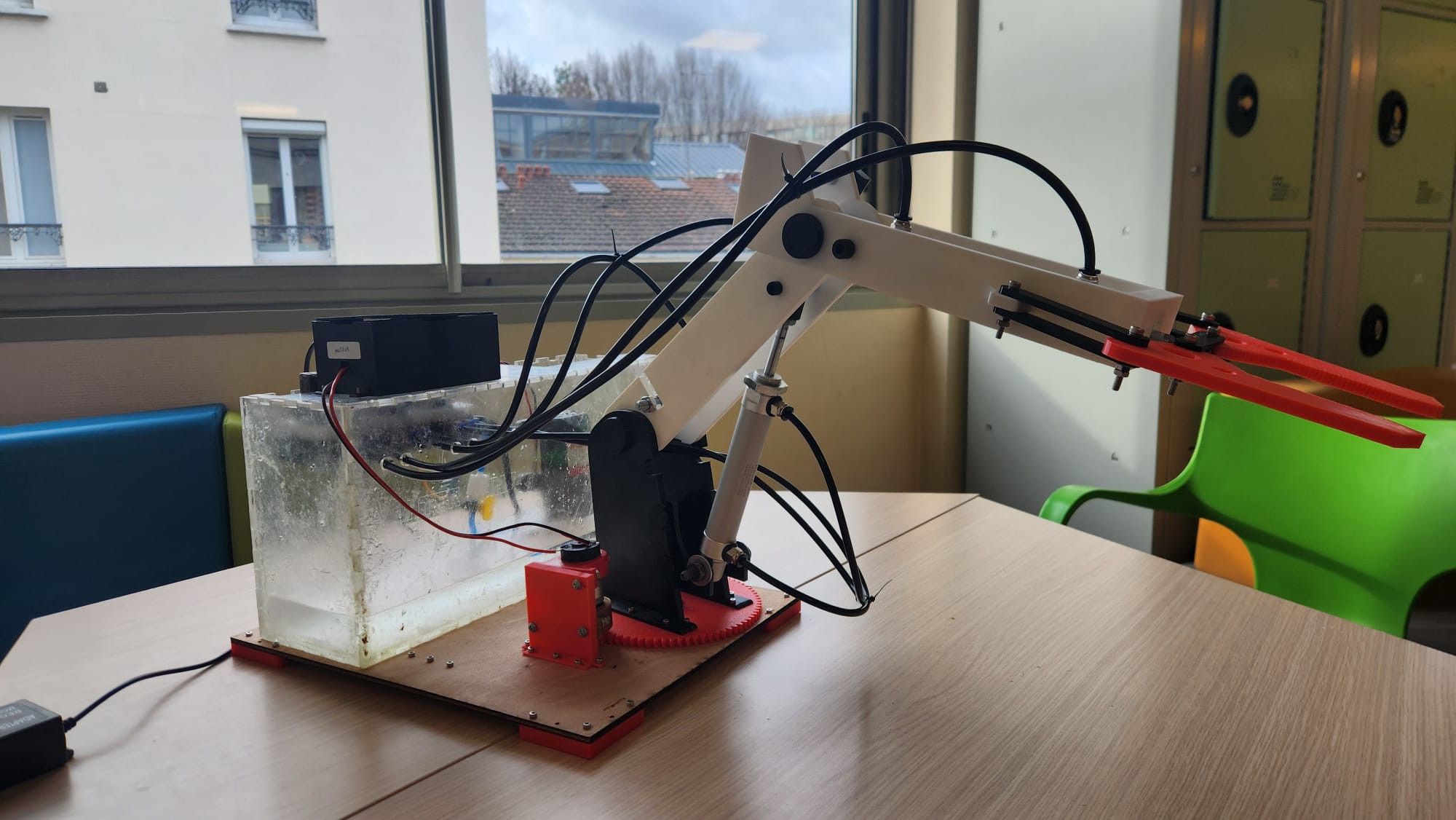
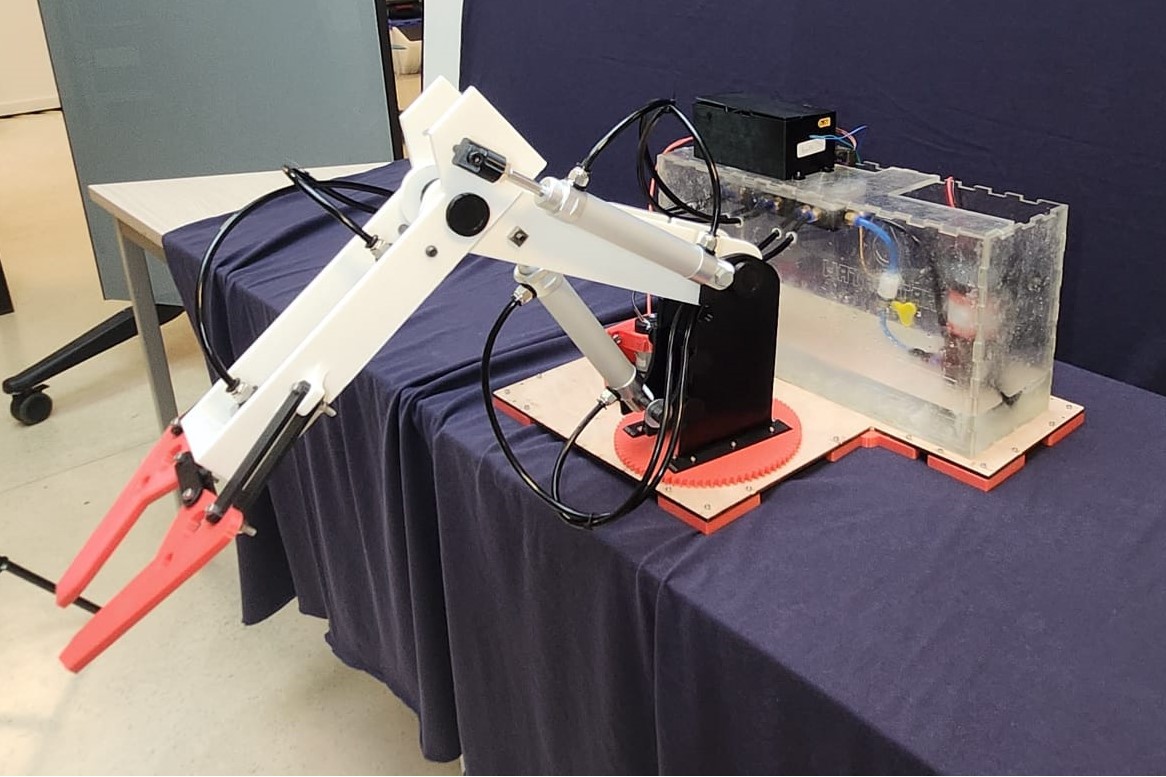
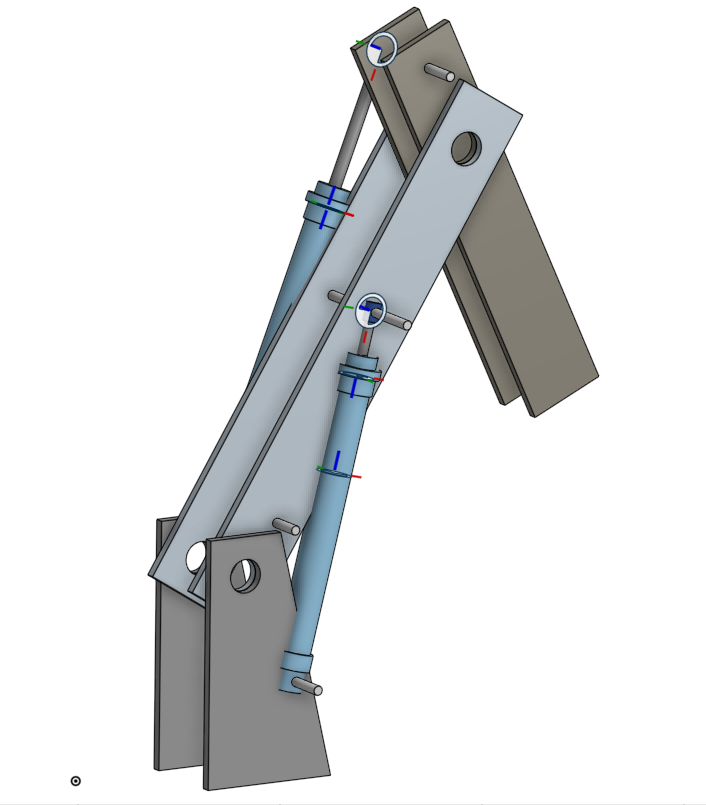
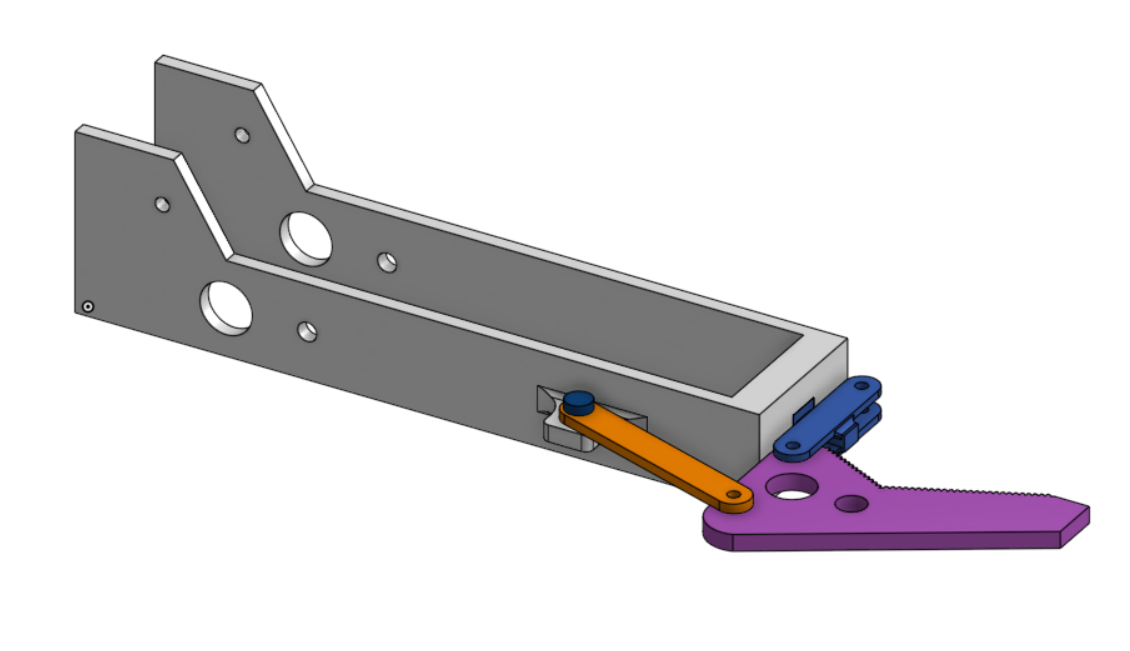
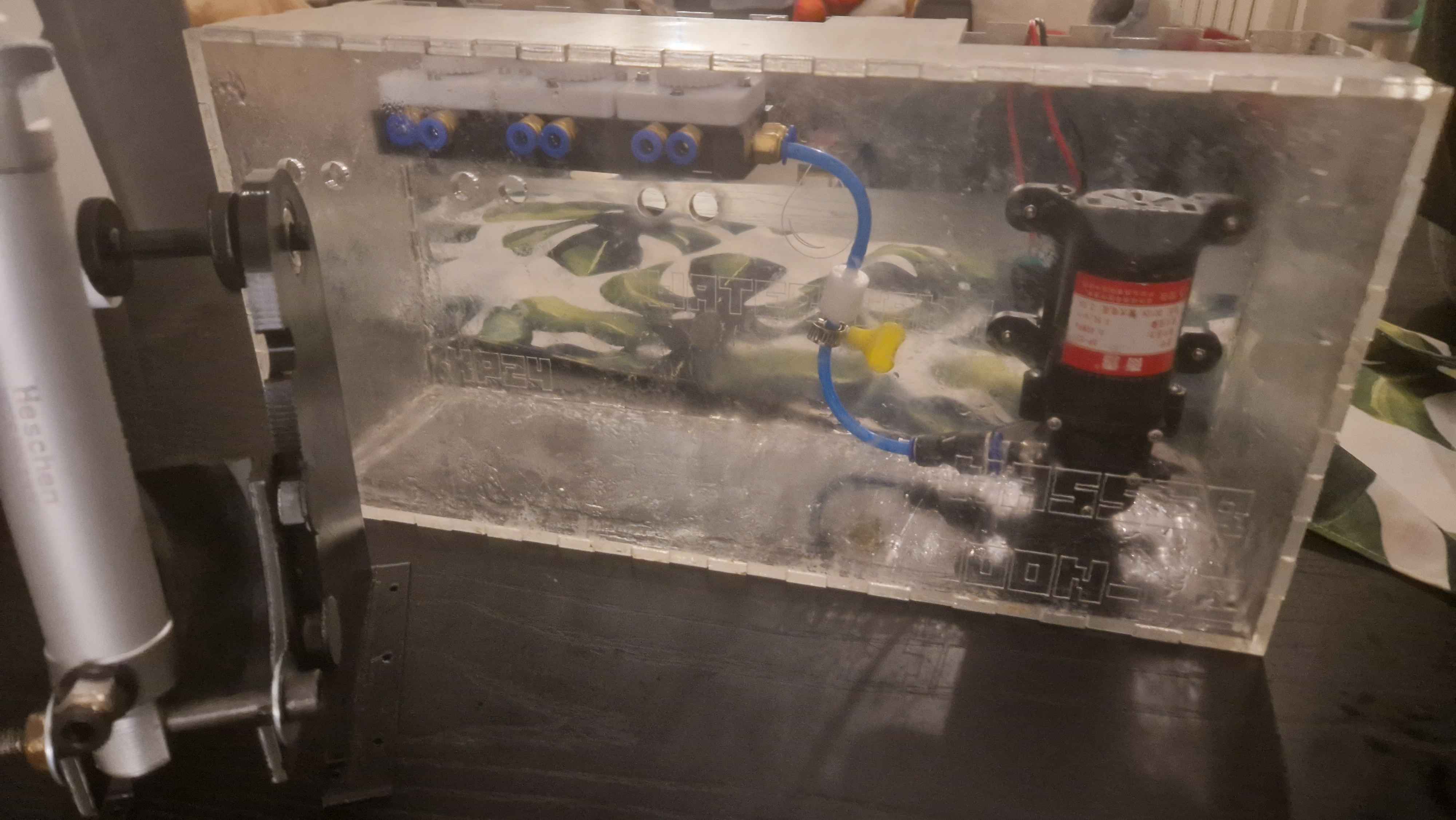
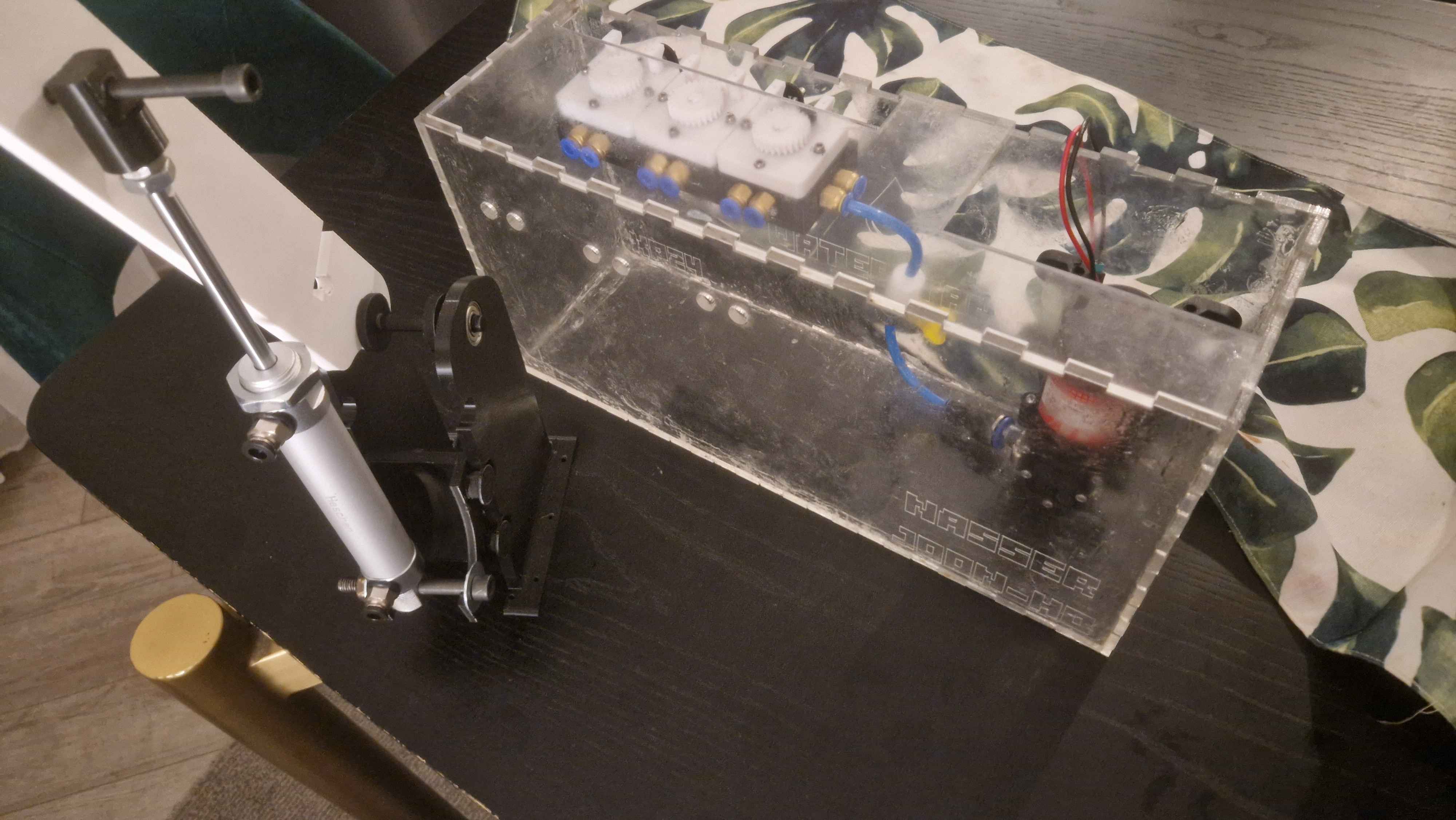
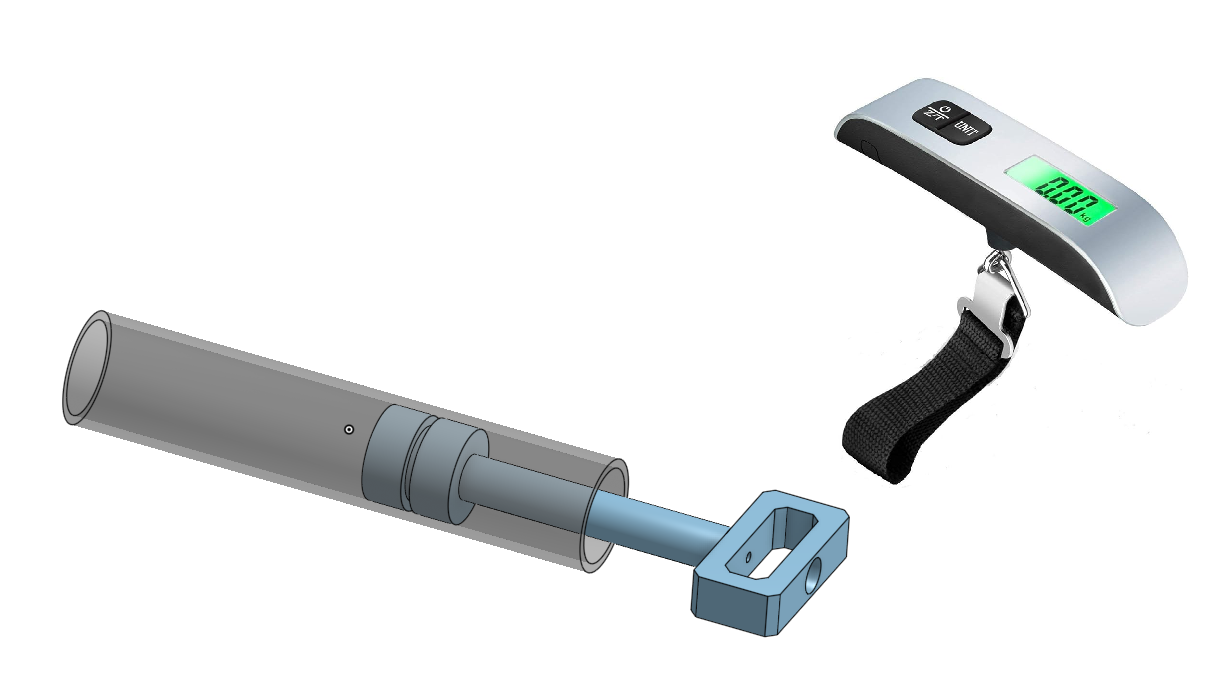
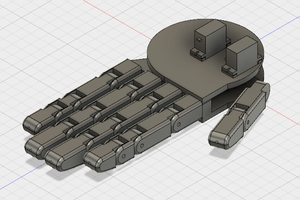
We are aspiring mechatronic engineers, and for a school project, we were given the opportunity to create something of our choice. We decided to build a small hydraulic arm to deepen our understanding of hydraulics and linear motion systems.
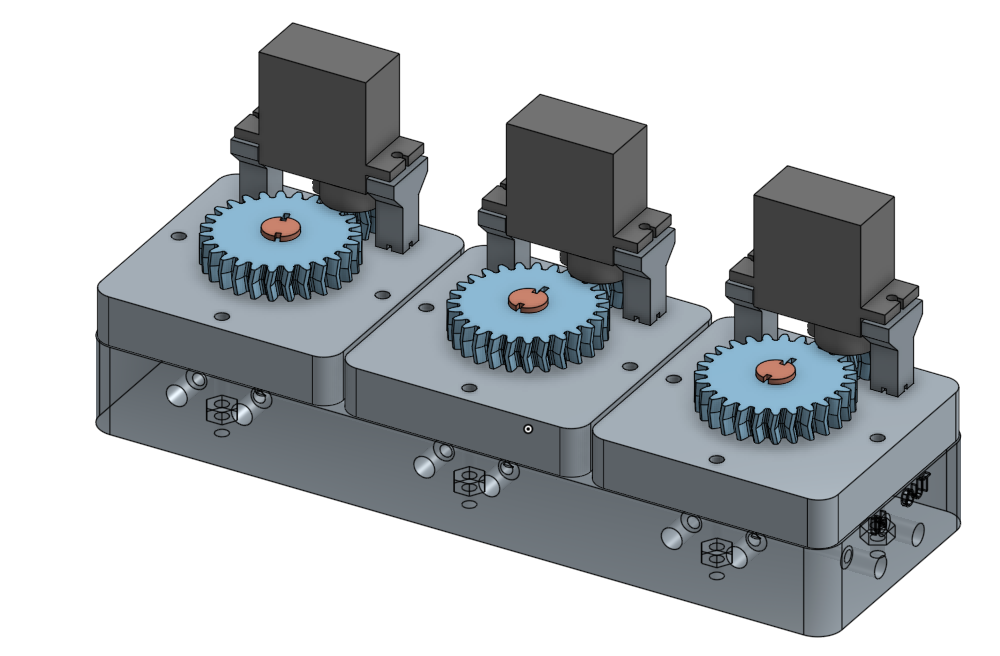
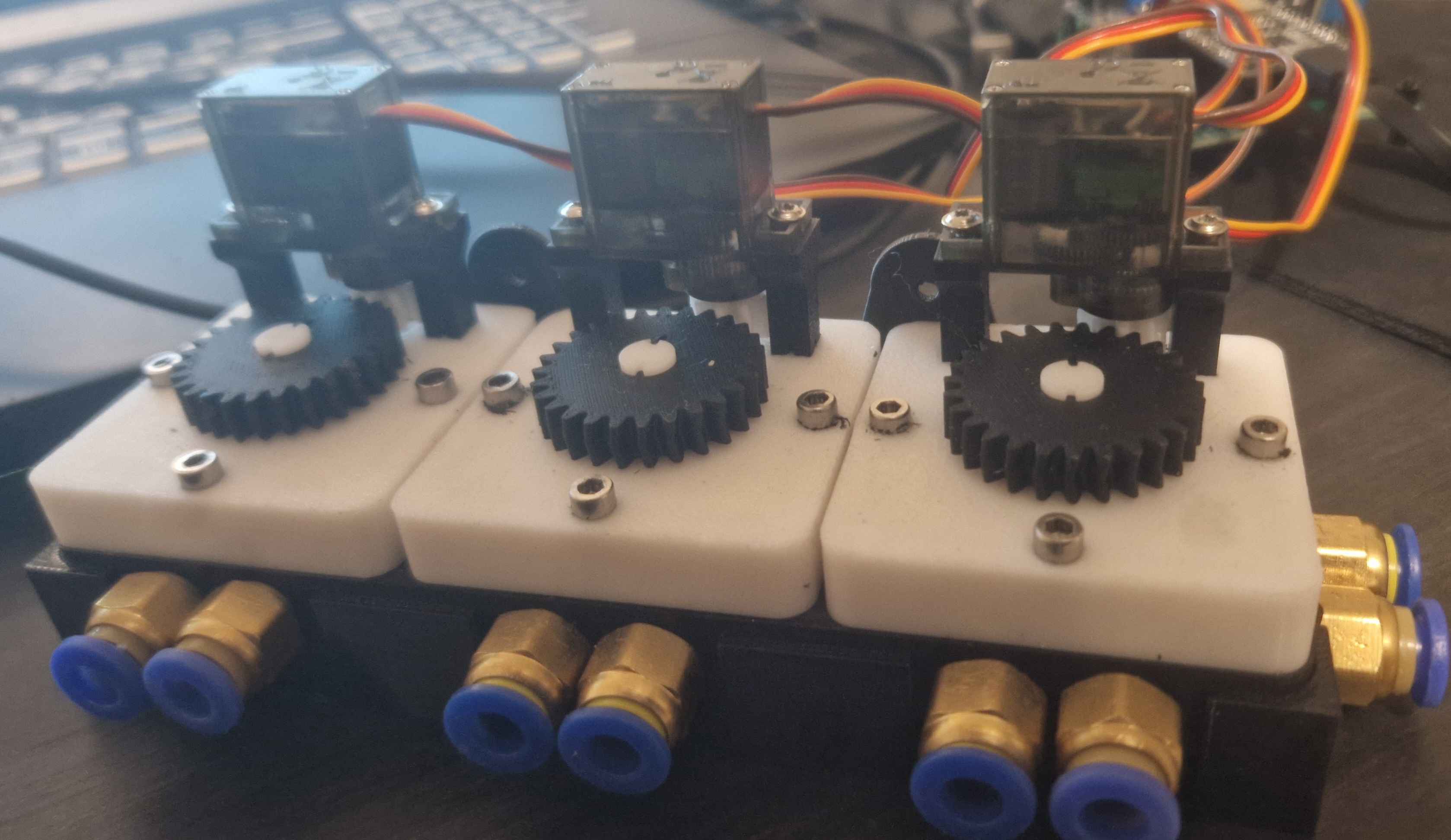
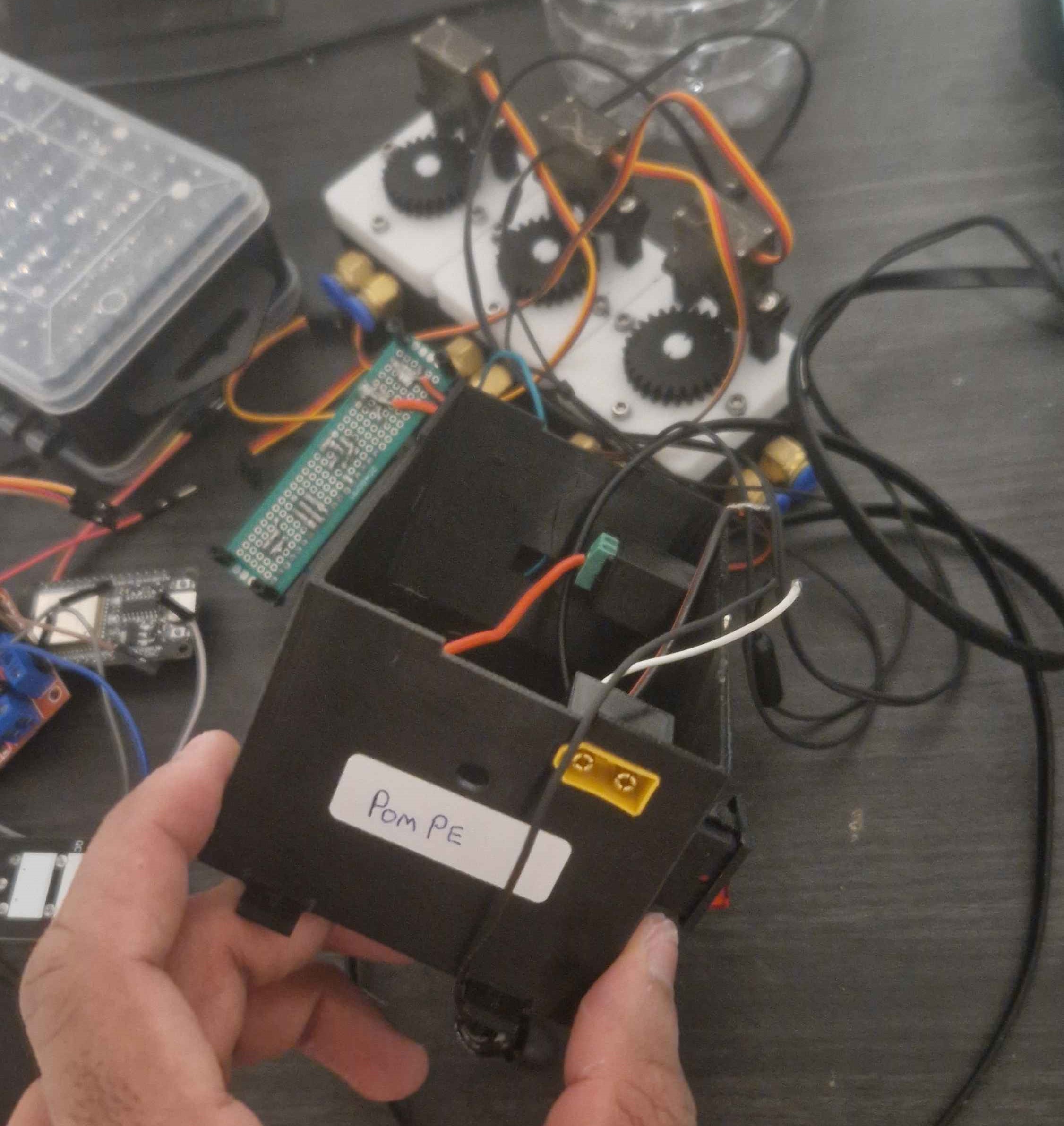
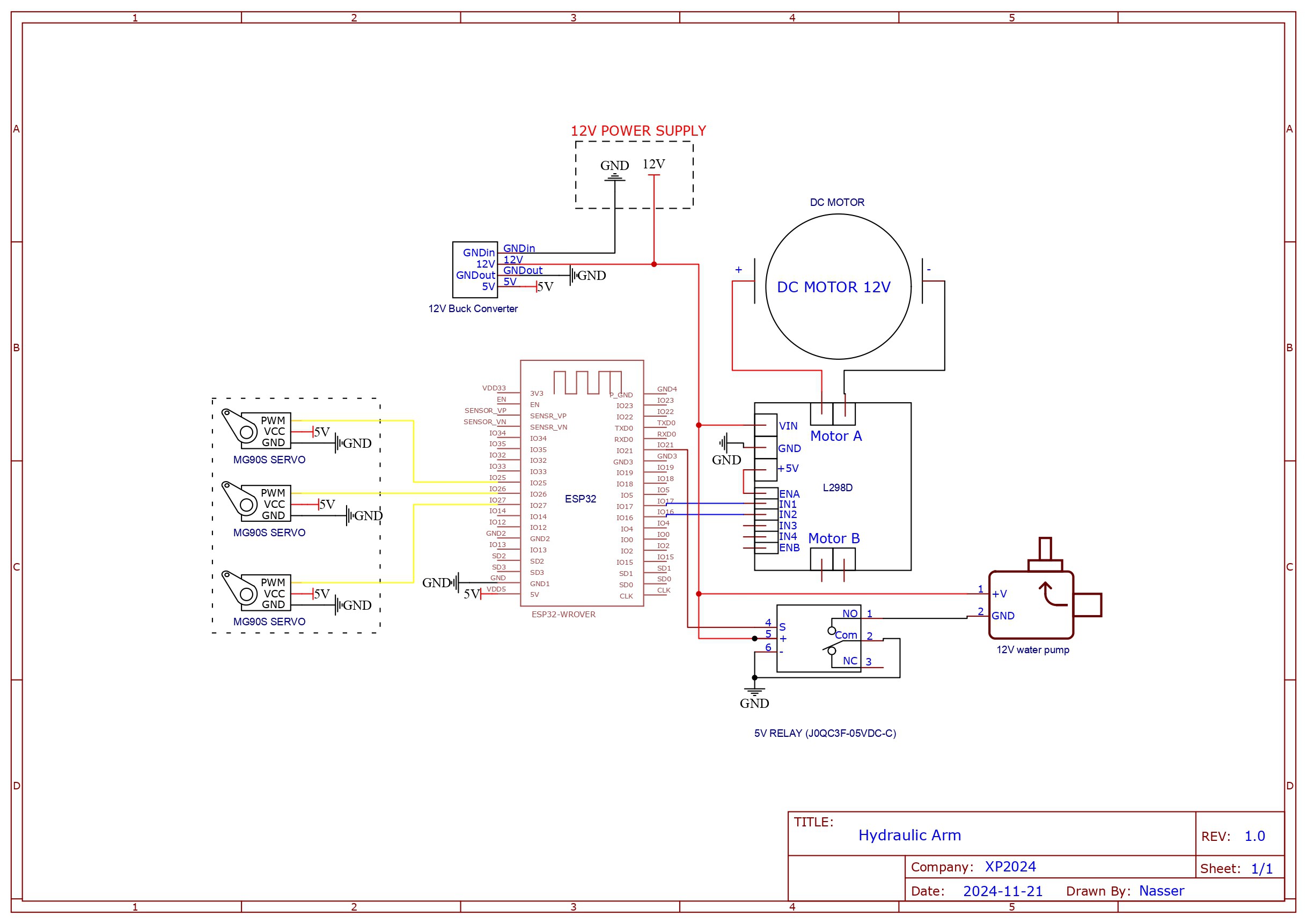
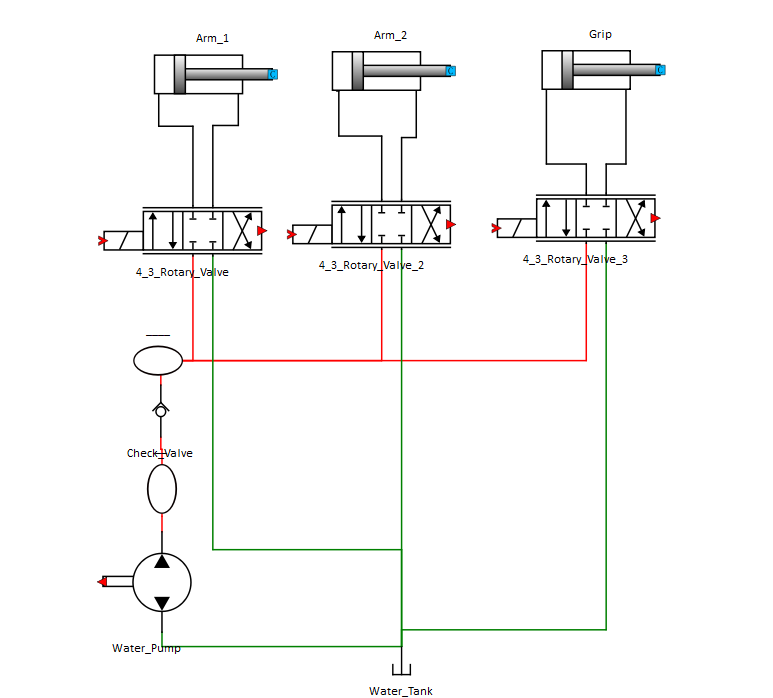
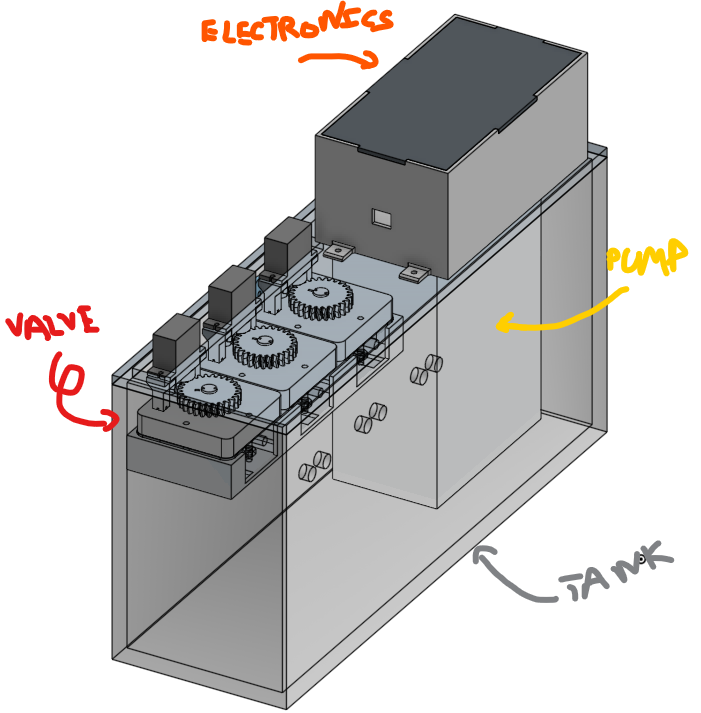
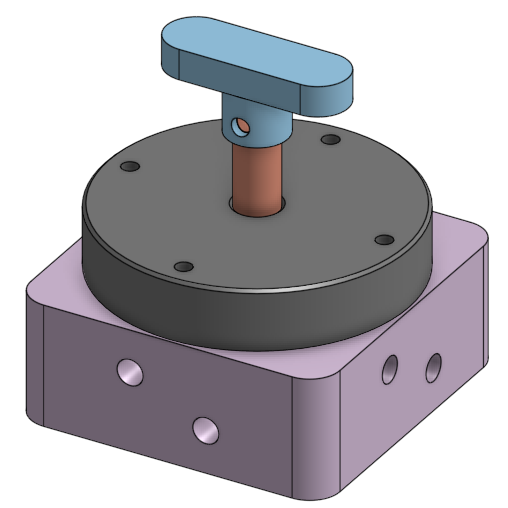
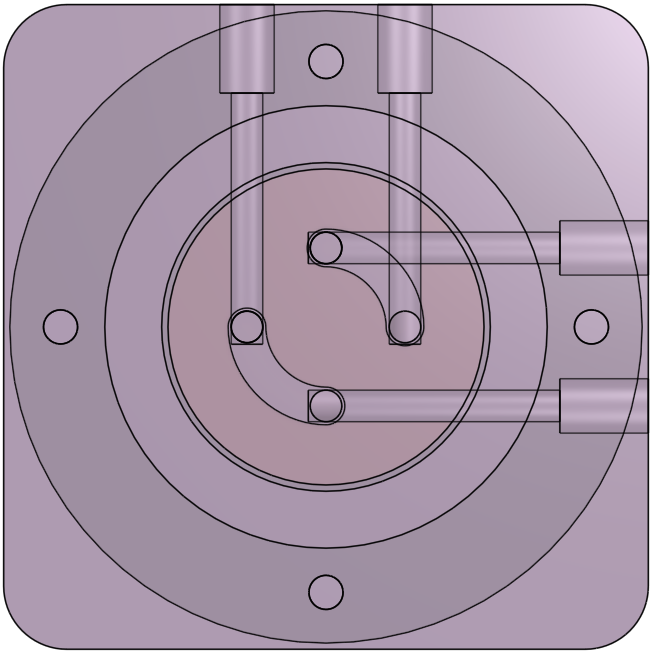
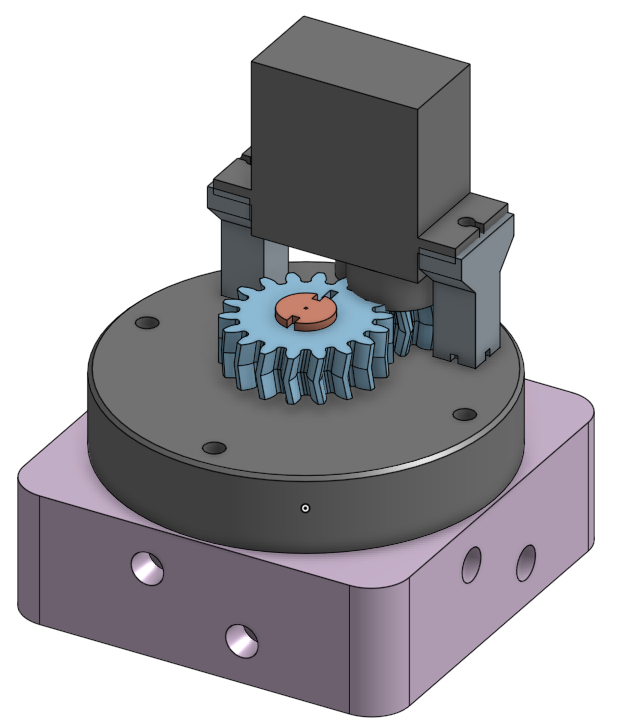
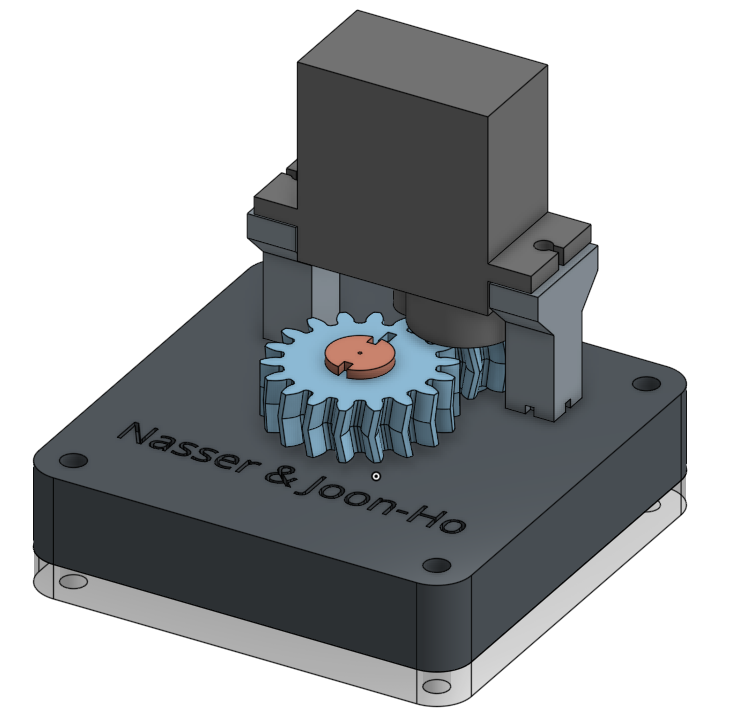
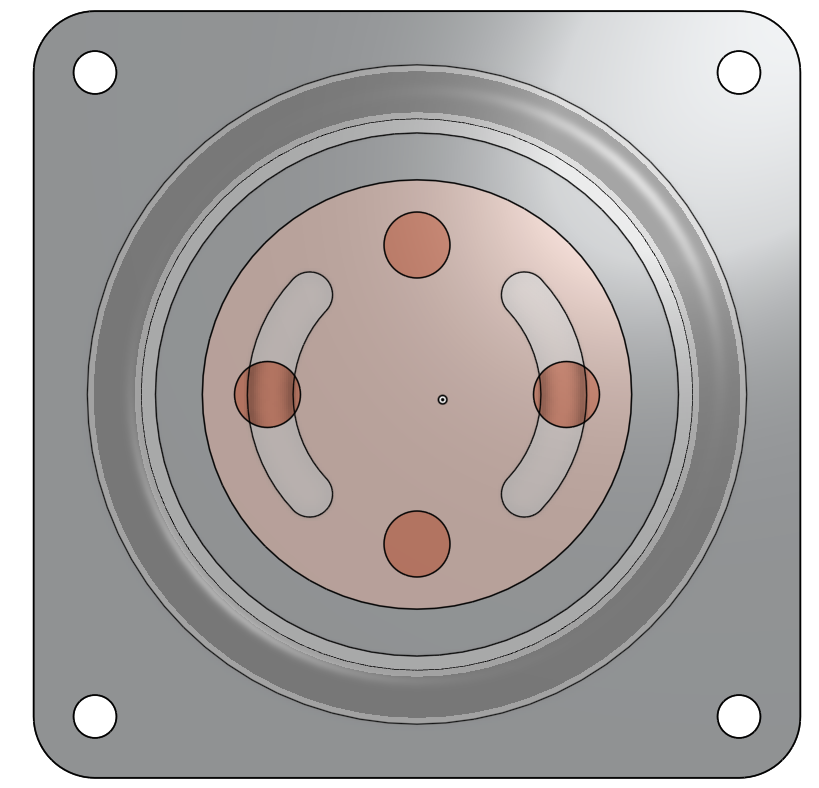
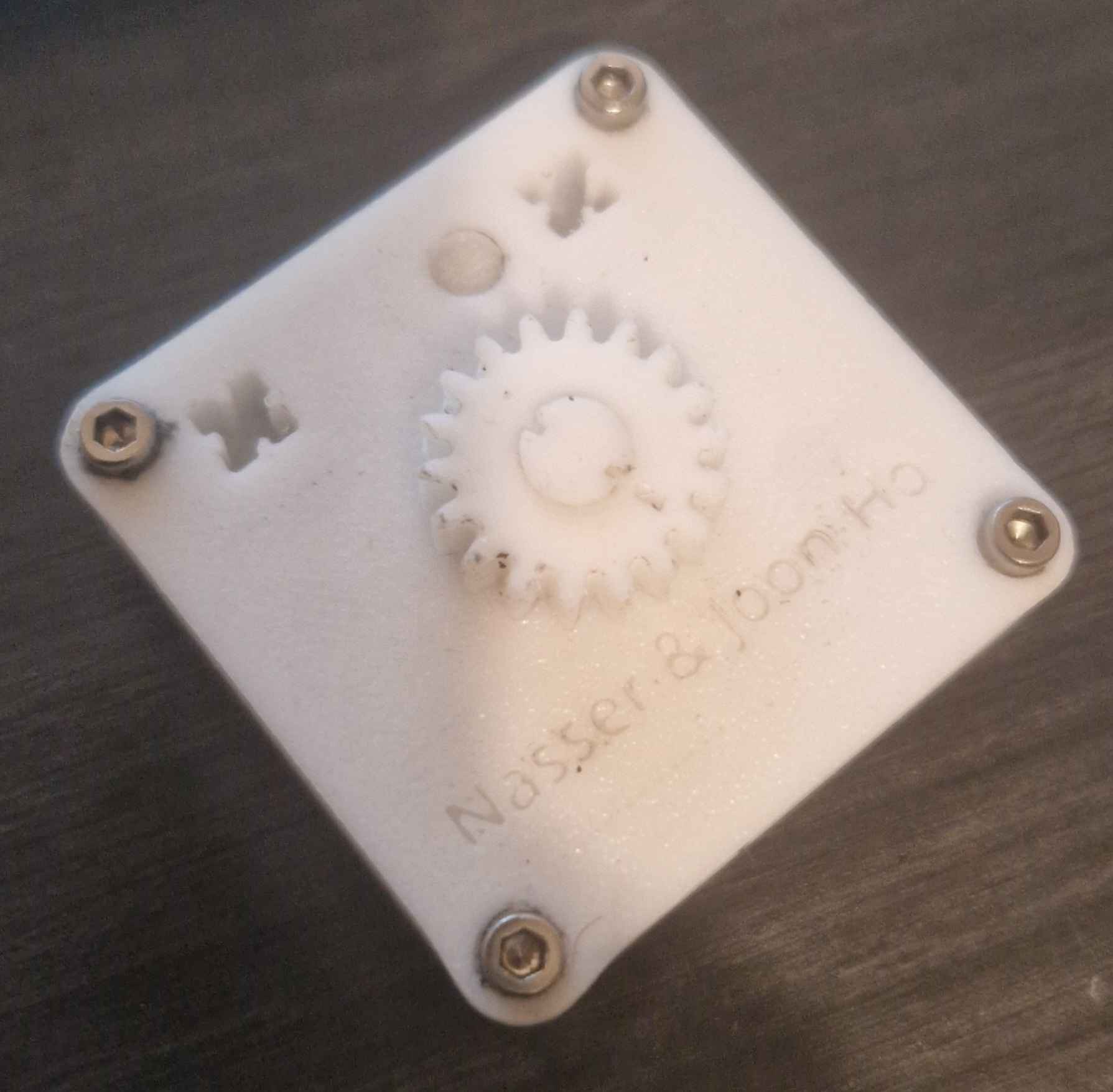
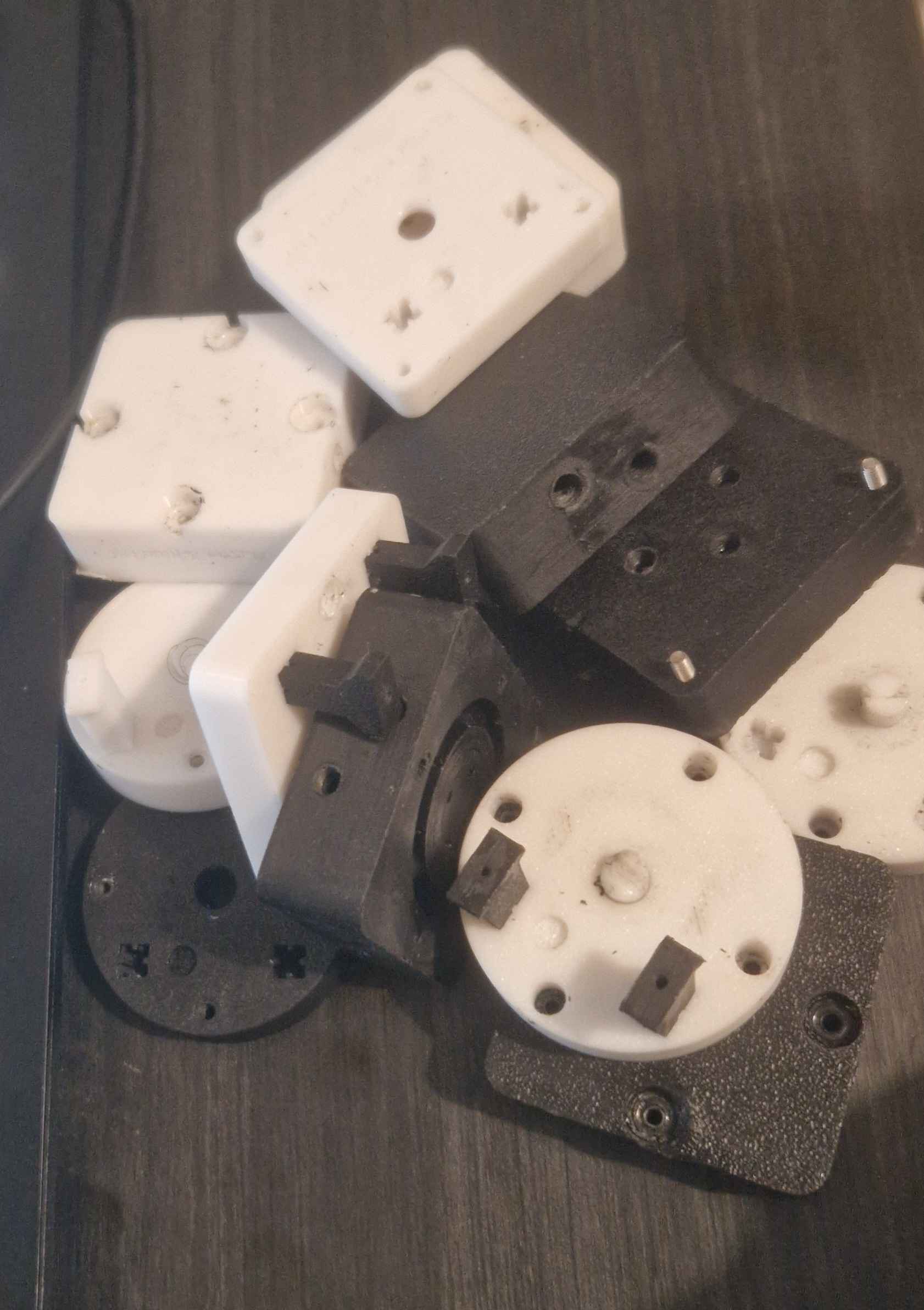
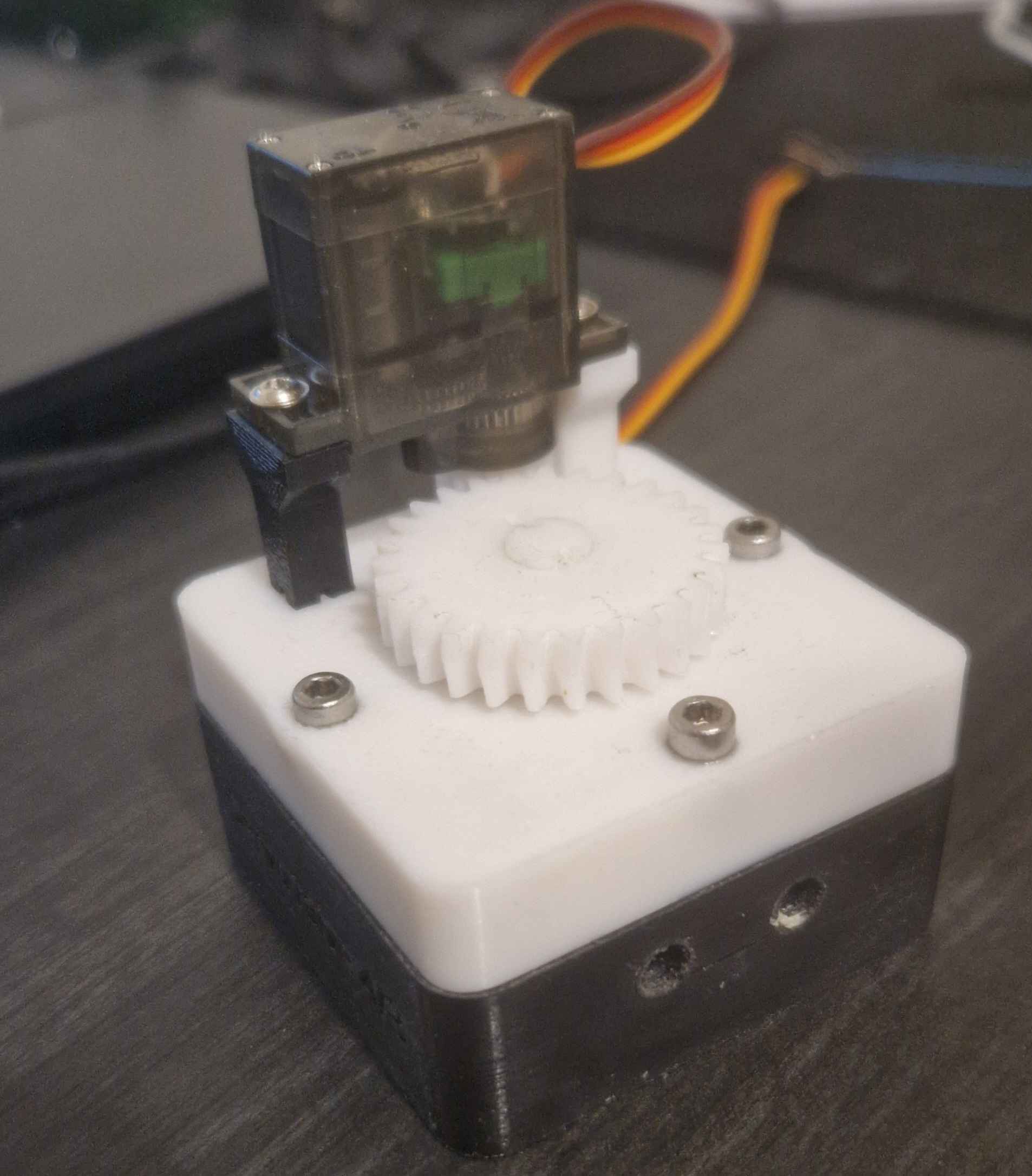
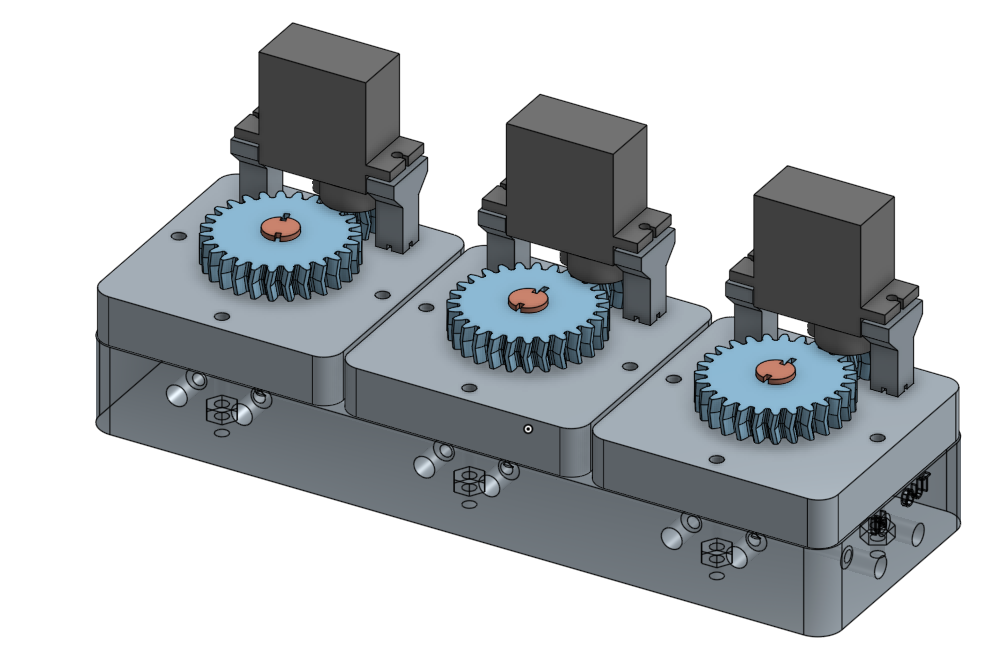
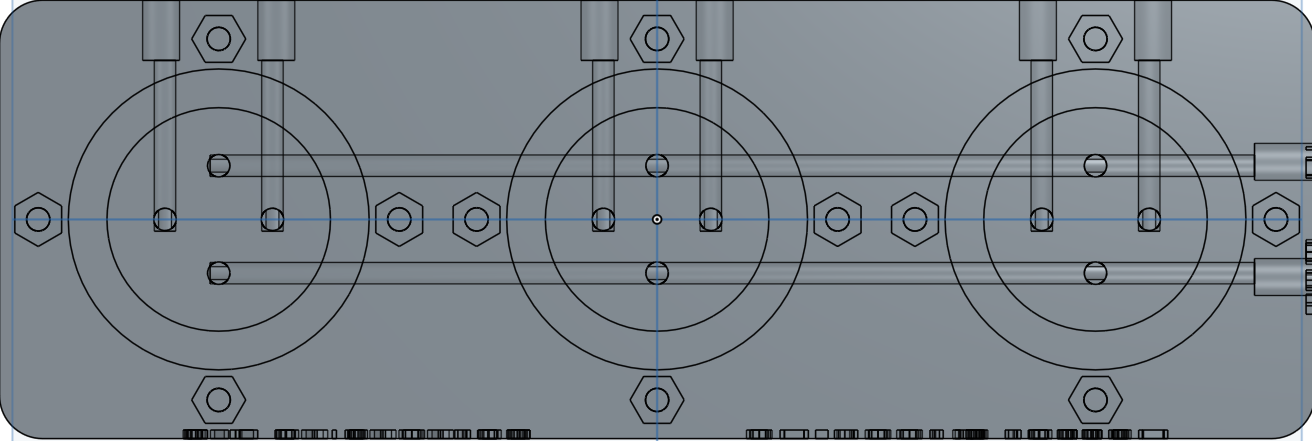
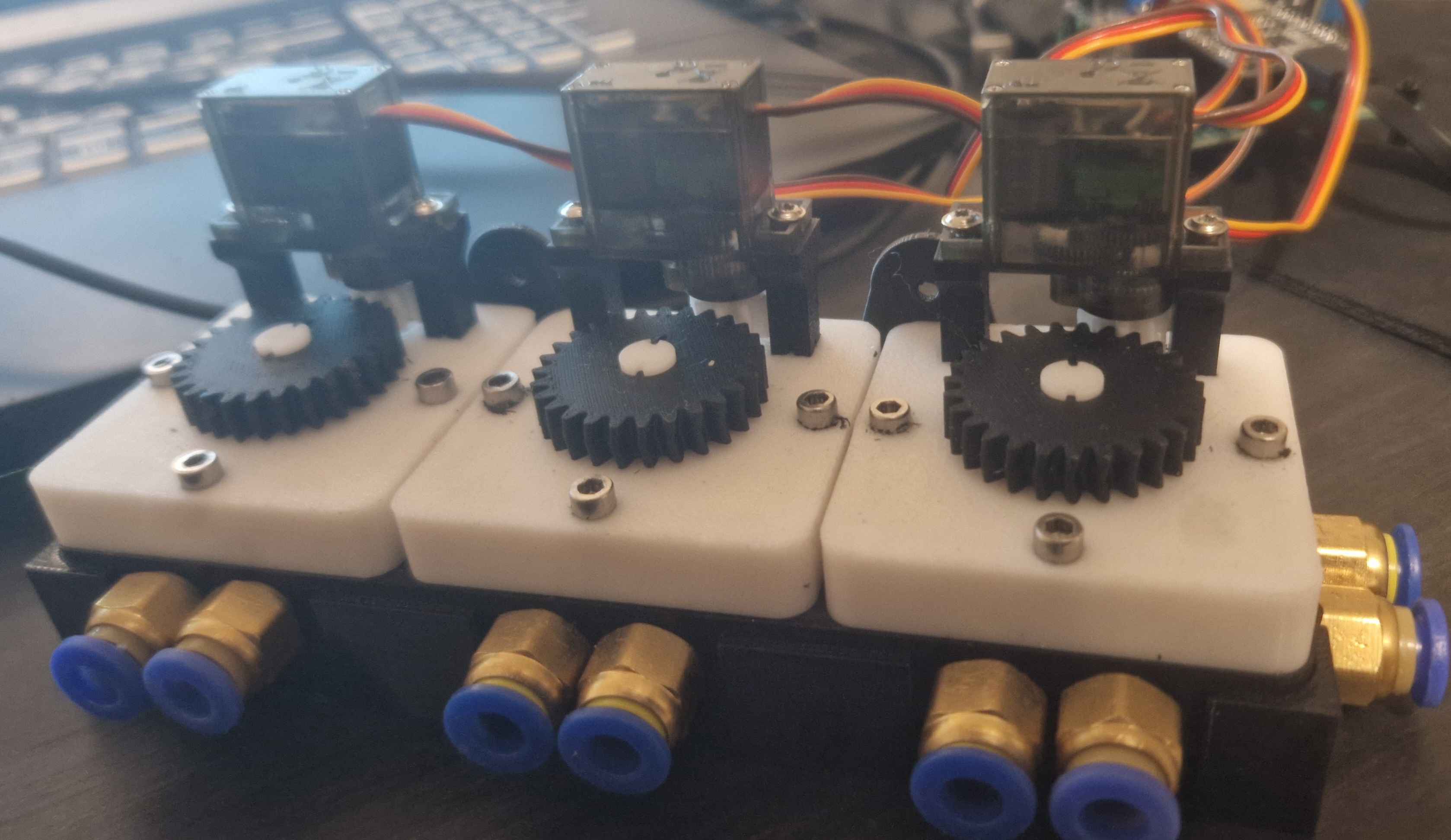
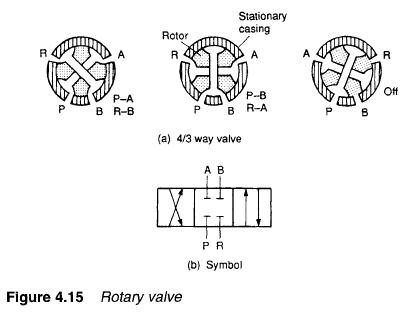
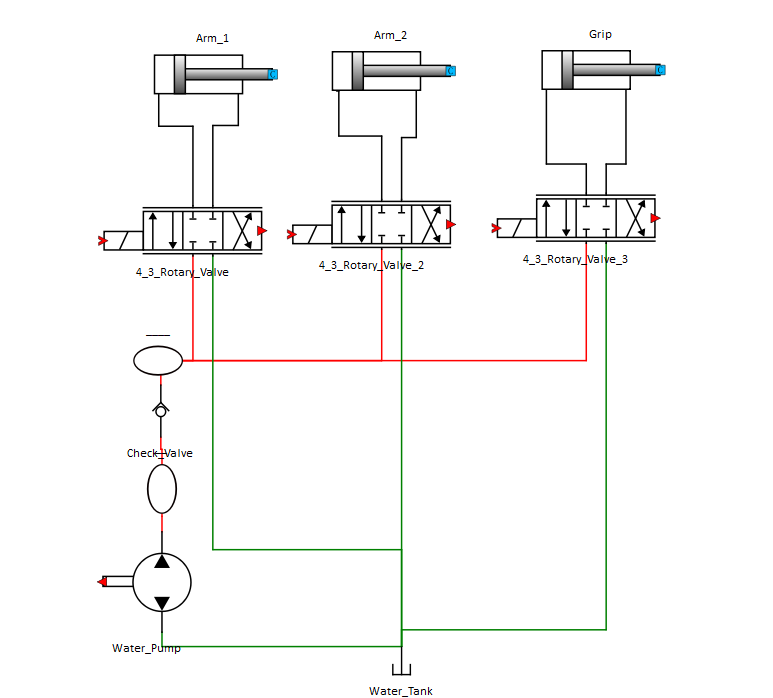
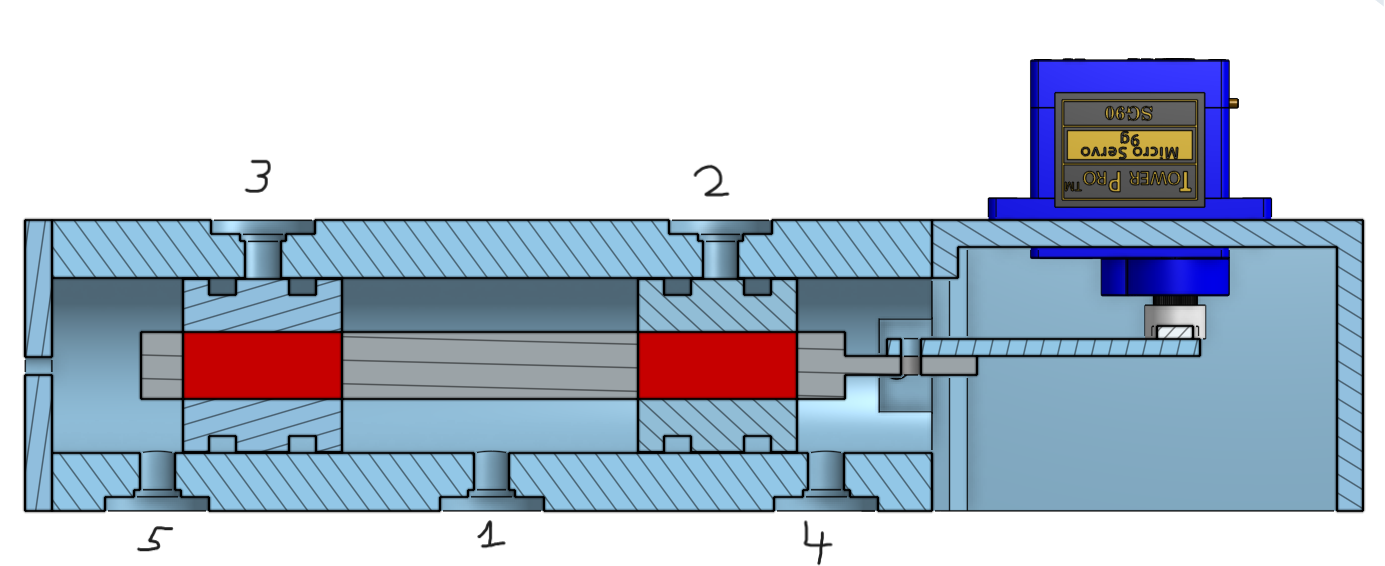
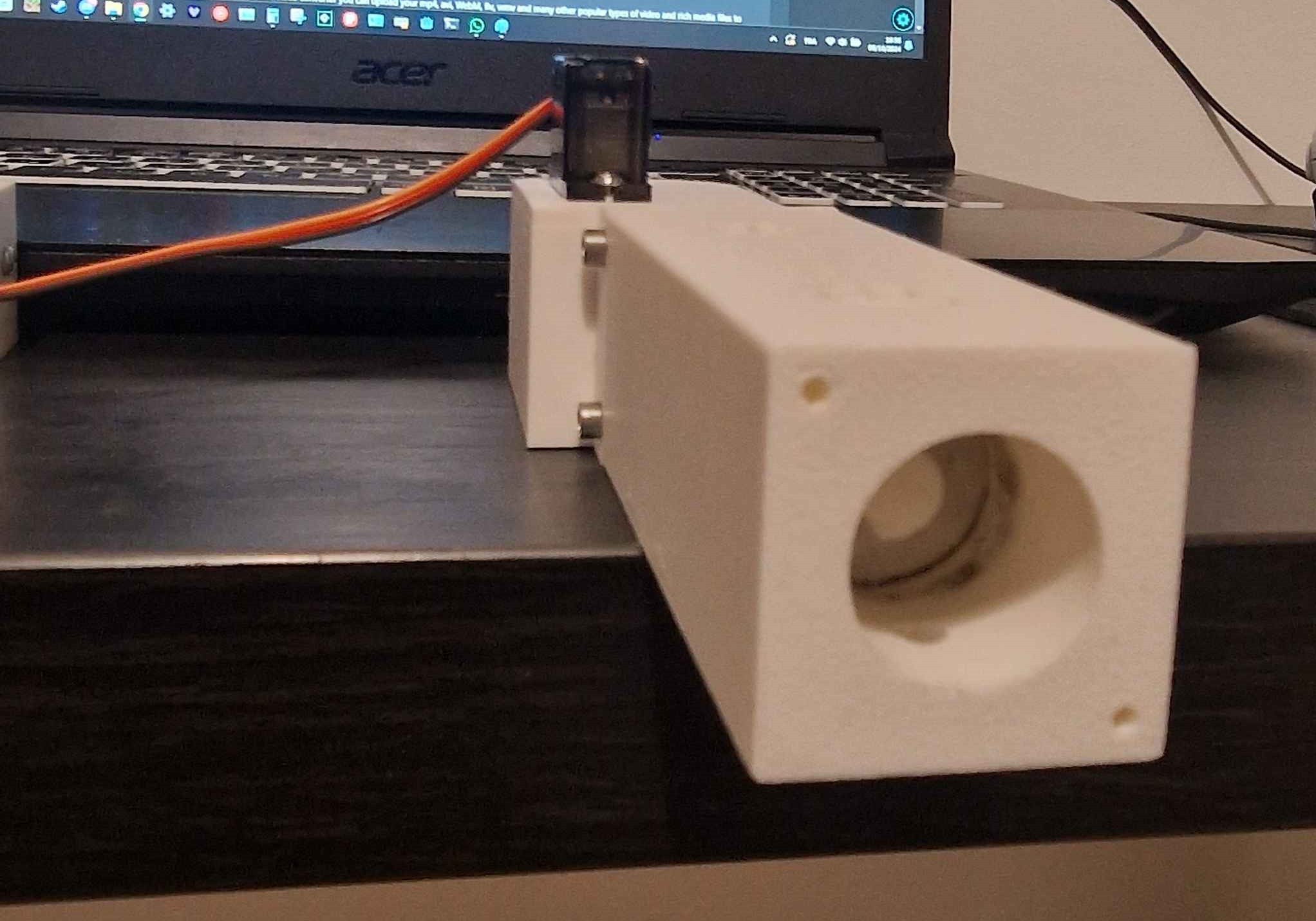
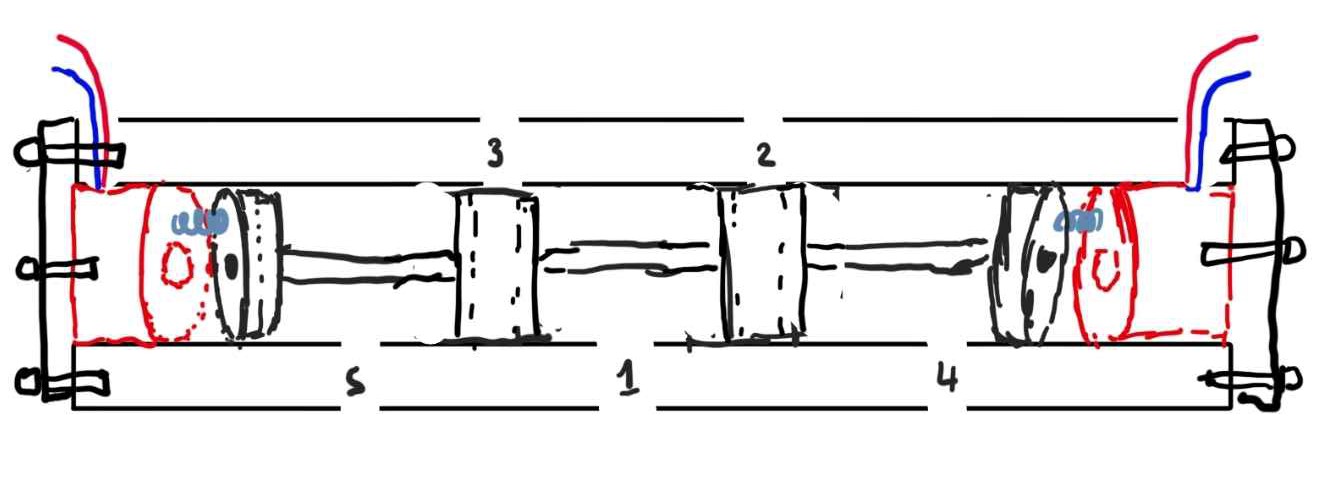
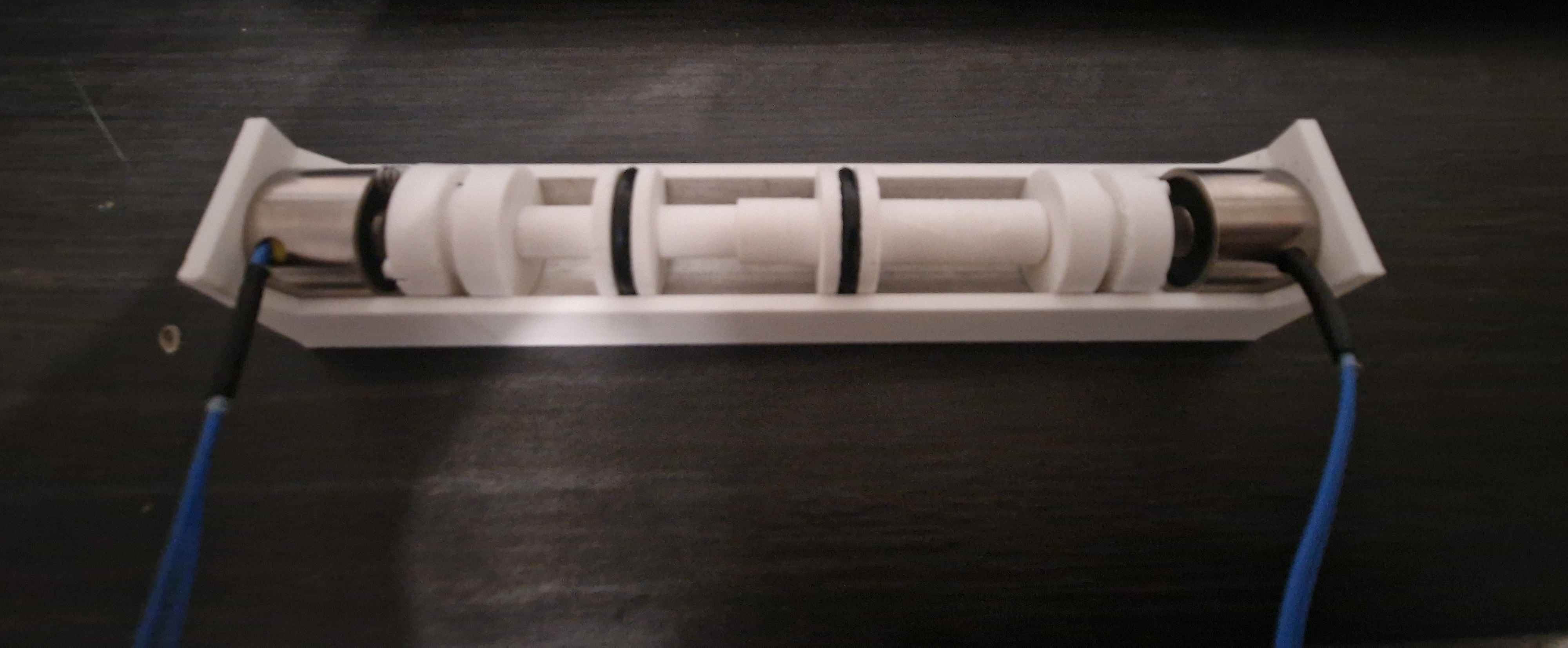
The project features a fully custom-designed 3D-printed 4/3 rotary directional control valve using mg90s servo.
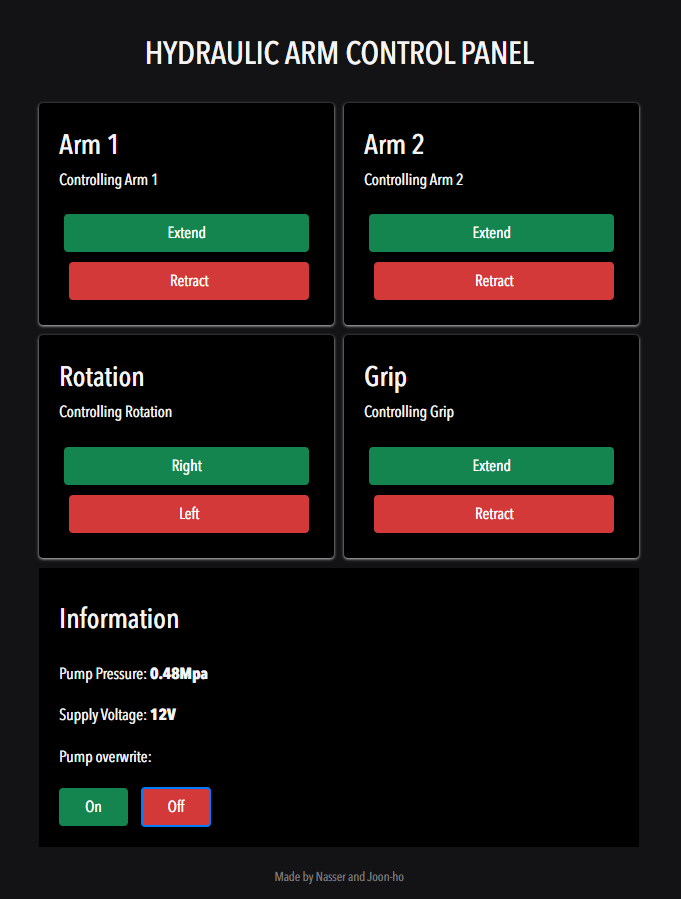
And a custom circuit with IoT control powered by an ESP32














 Chad Paik
Chad Paik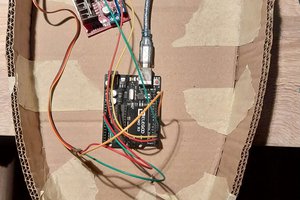
 theo.ducarne
theo.ducarne