Nasser
Nasser-
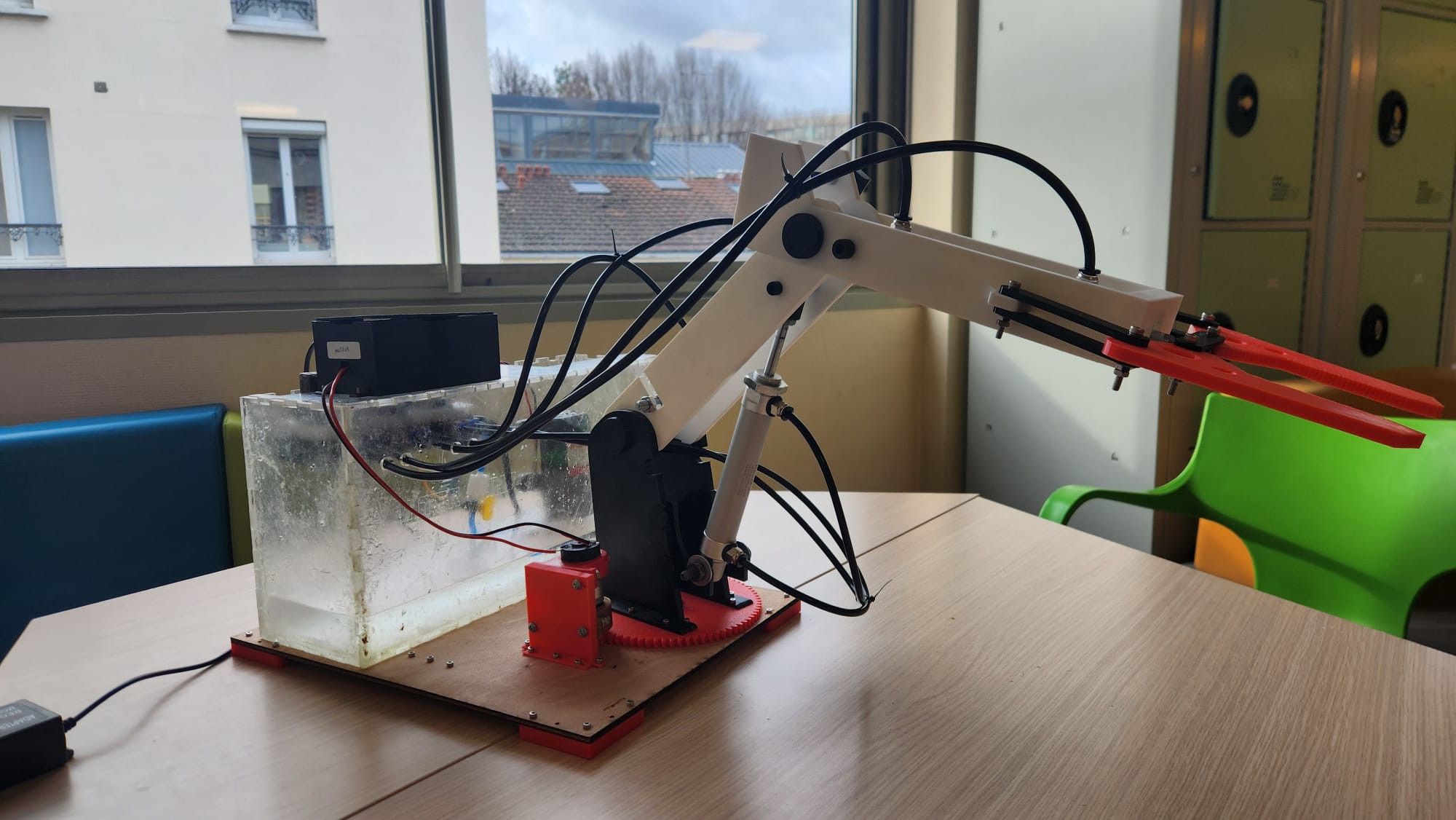
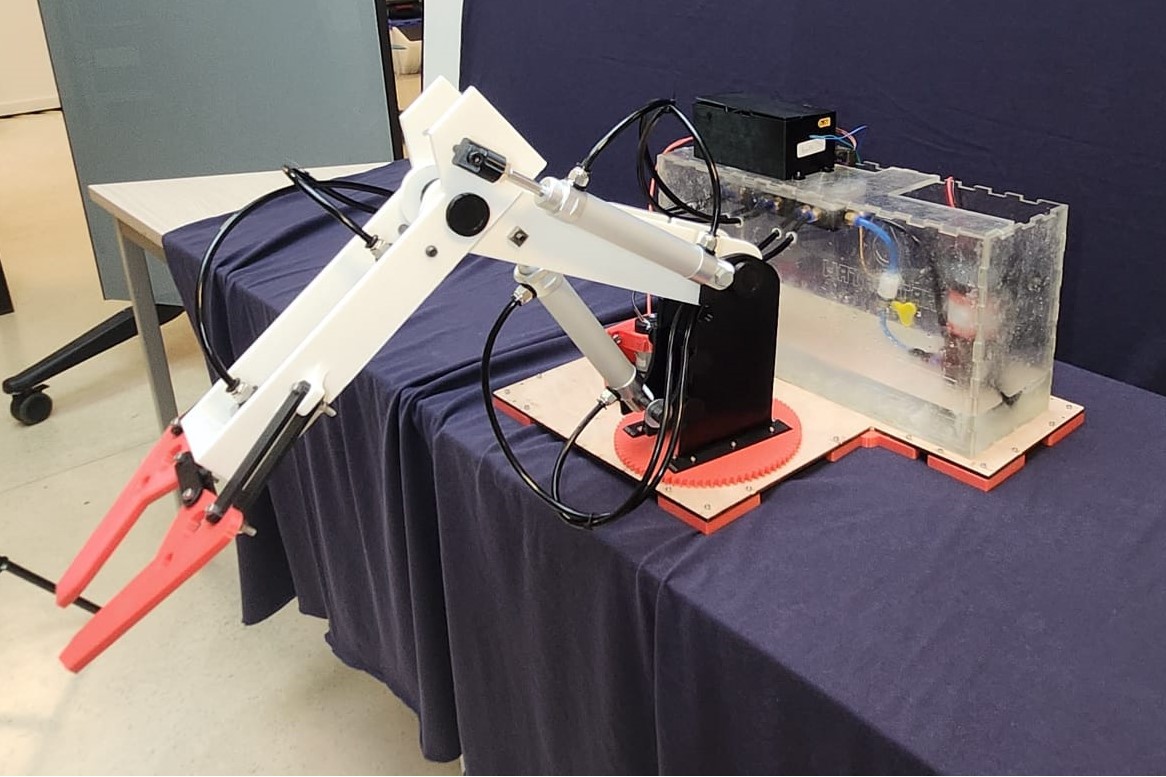
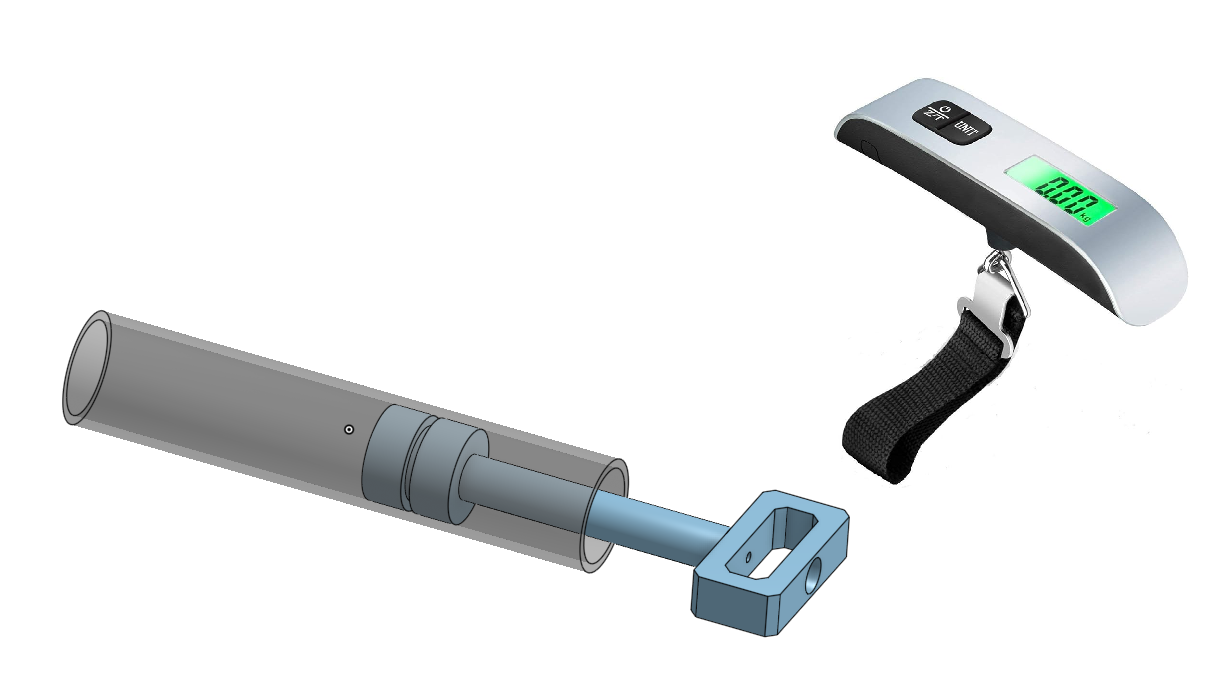
Testing our small hydraulic arm
12/20/2024 at 17:15 • 0 commentsFirst test run :
![]()
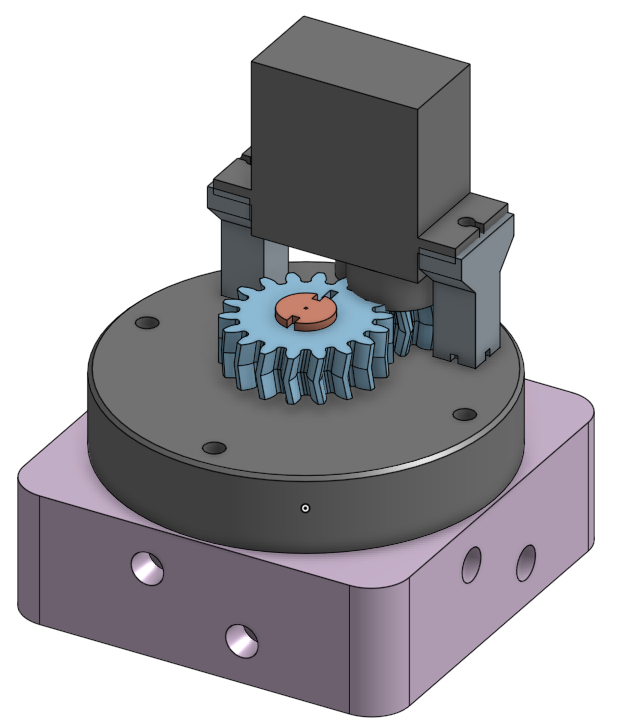
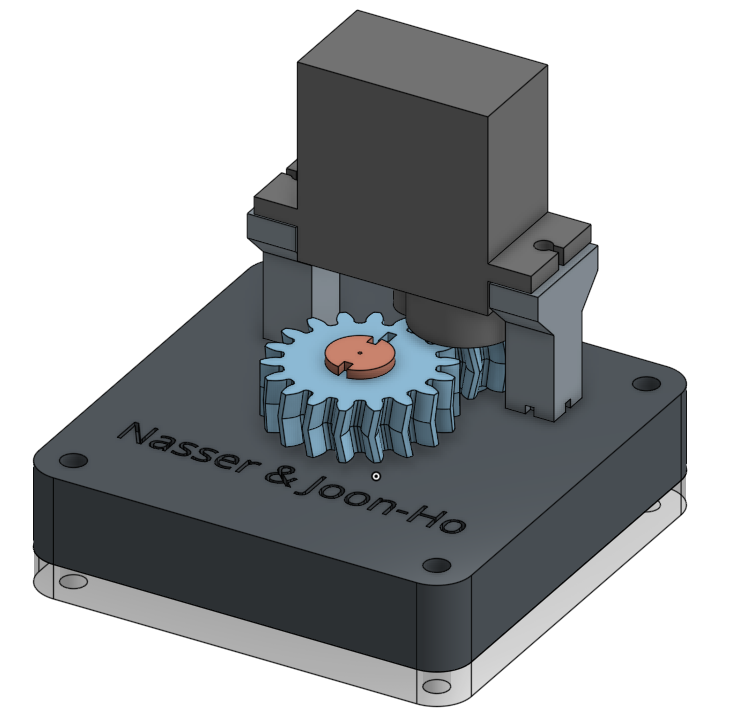
Some picture of the completed project :
![]()
![]()
![]()
Another test :
![]()
-
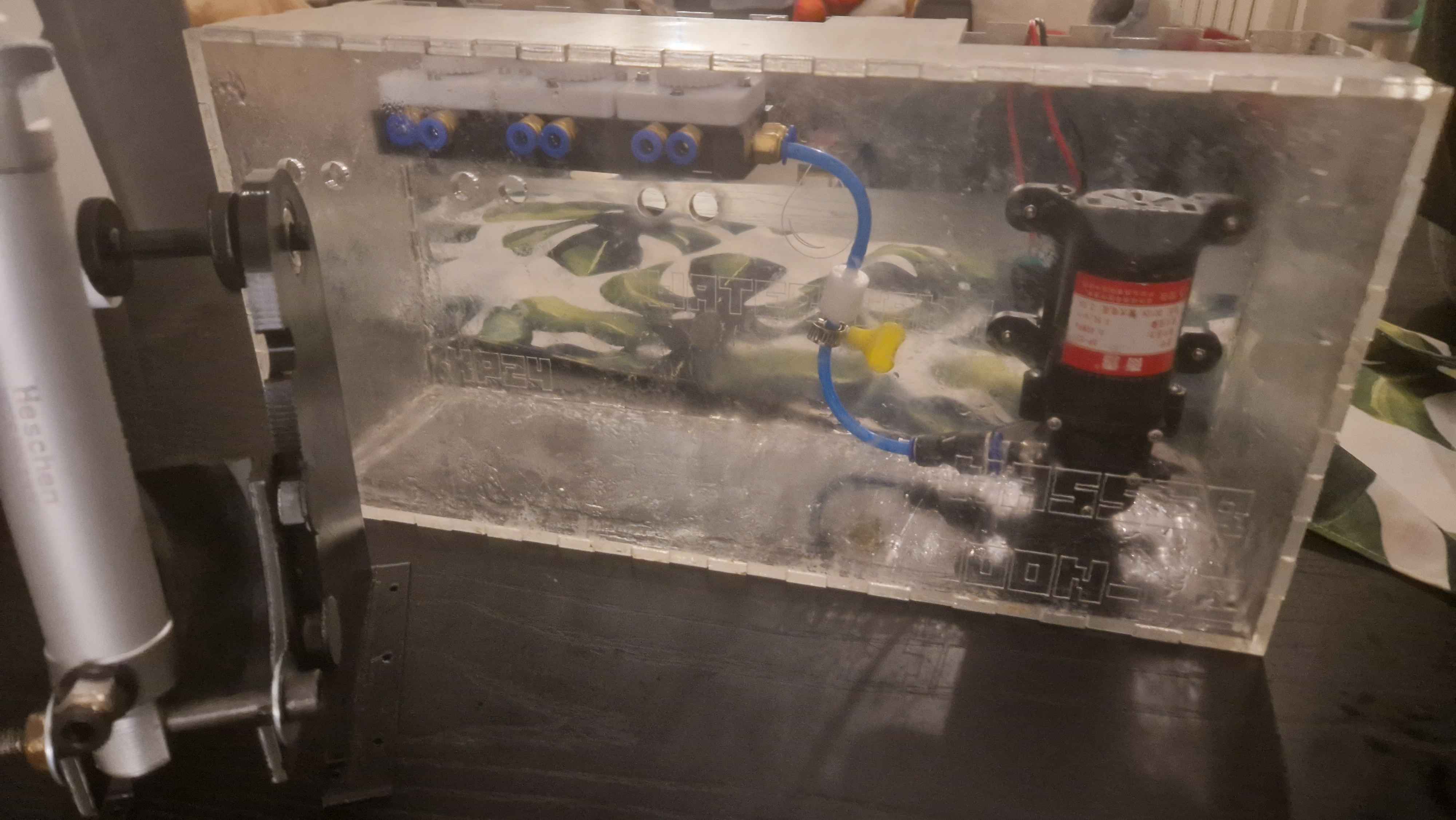
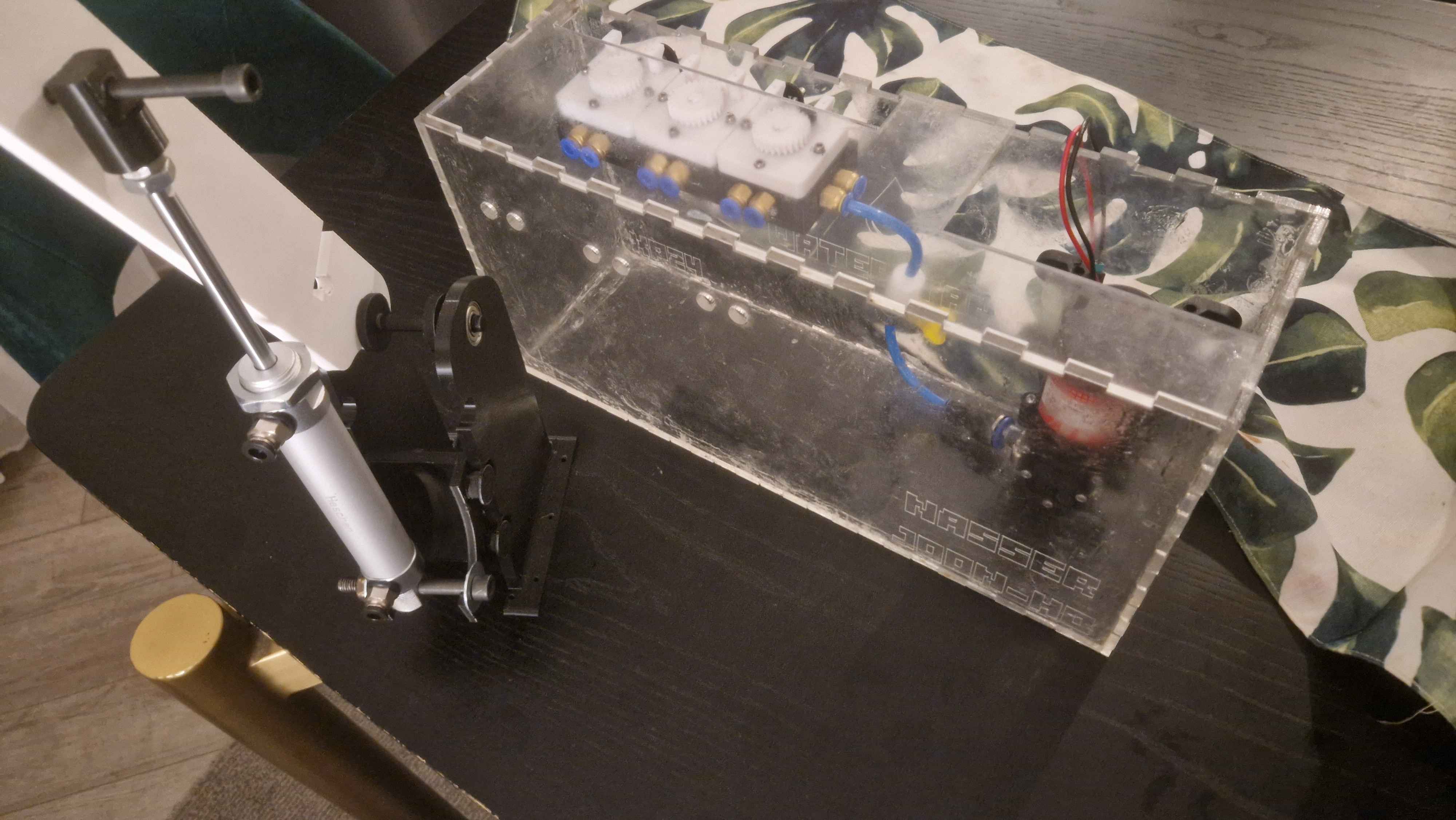
Putting everything together
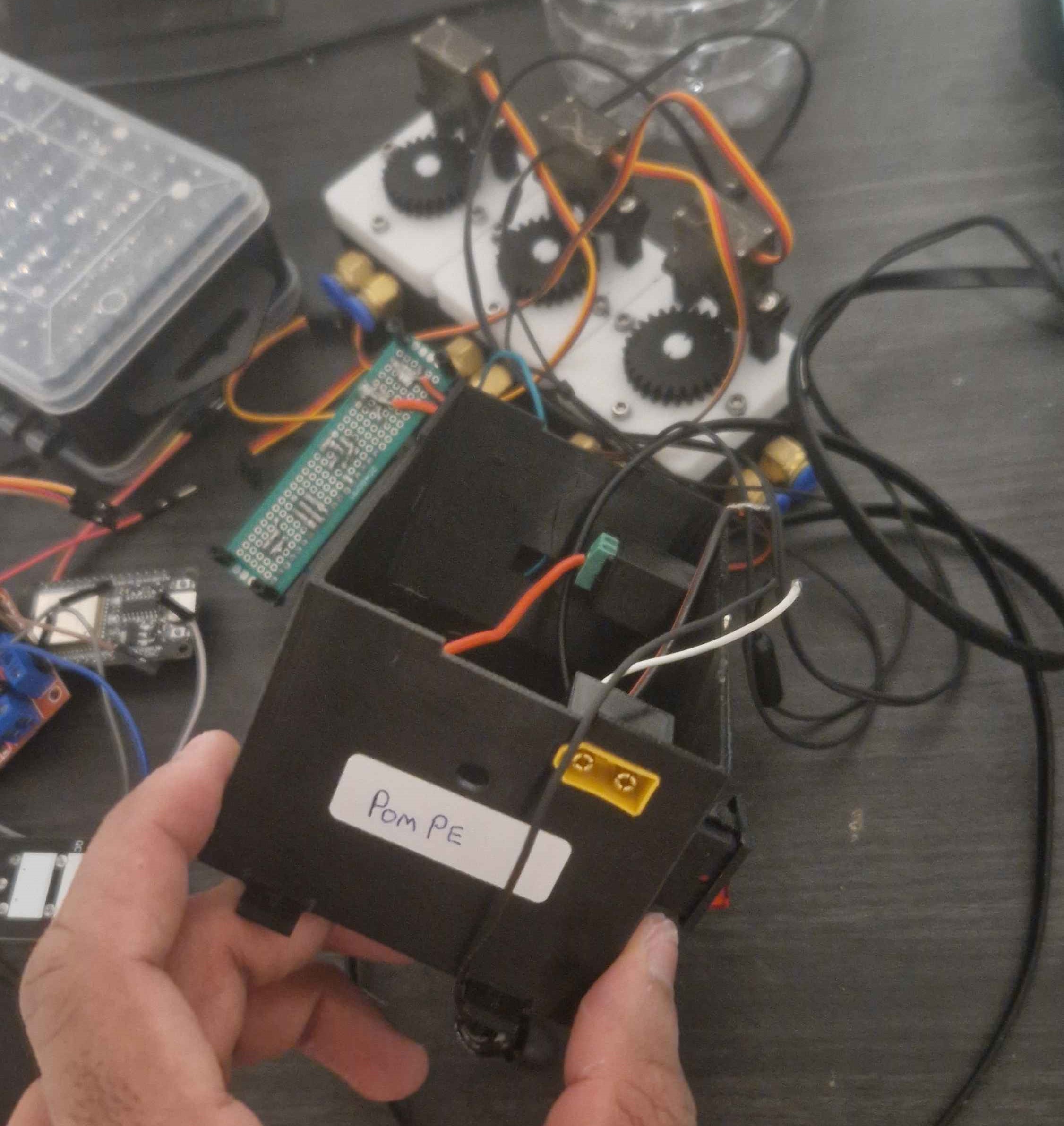
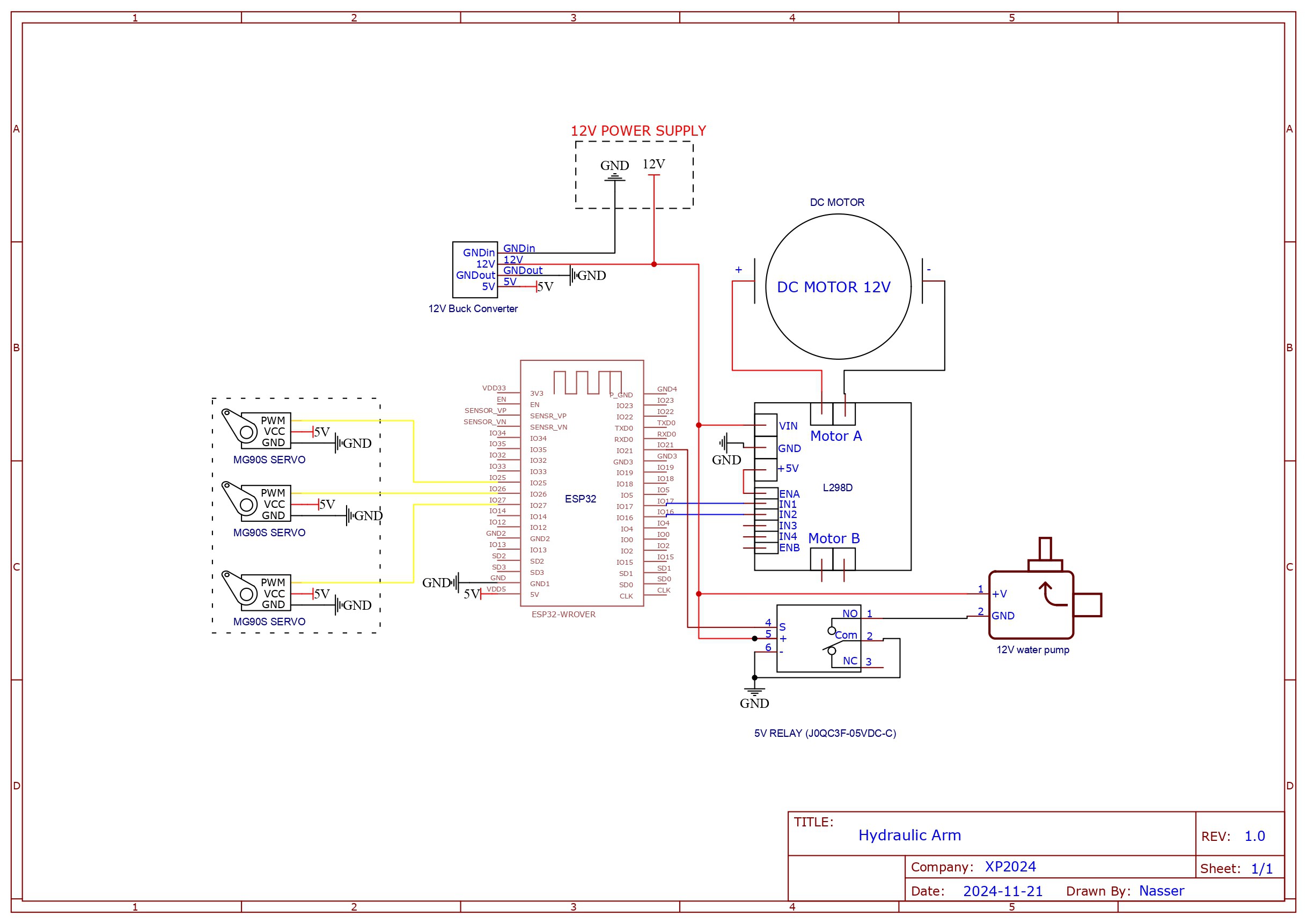
12/20/2024 at 16:45 • 0 commentsWith all components fully assembled—the arm, watertank, valves, and electronics—we were ready to integrate everything:
- Electronics Box: We wired the valve, pump, and rotation motor to our electronics box.
![]()
![]()
- Base and Gear Mounting: The large gear, arm, and rotation motor were securely bolted onto the wooden base.
![]()
- Hydraulic Tubing: All hydraulic tubes were connected,.
![]()
- System Filled and Ready: We filled the hydraulic tank with fluid, checked for leaks, and ensured all connections were secure.
Finally, everything was ready for the first test run!
![]()
-
Design and making of the 3d printed Arm
12/17/2024 at 22:59 • 0 commentsFirst Design of the ARM
At first, we planned a laser-cut wooden frame for the arm and gripper.
This was our initial design for the arm frame :
![]()
And for the gripper :
![]()
However, we shifted to 3D printing to enable more complex shapes and greater convenience.
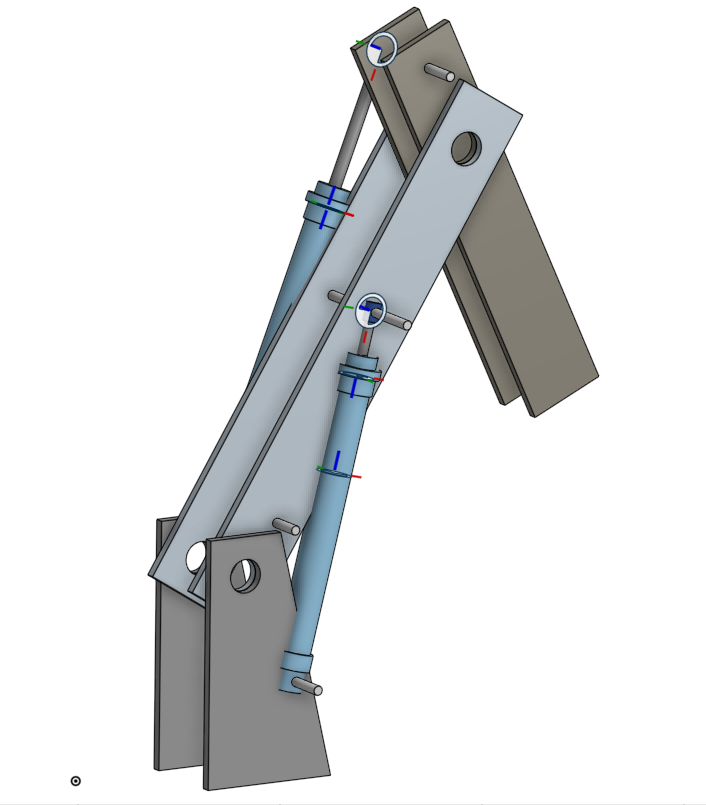
FINAL DESIGN OF THE ARM
![]()
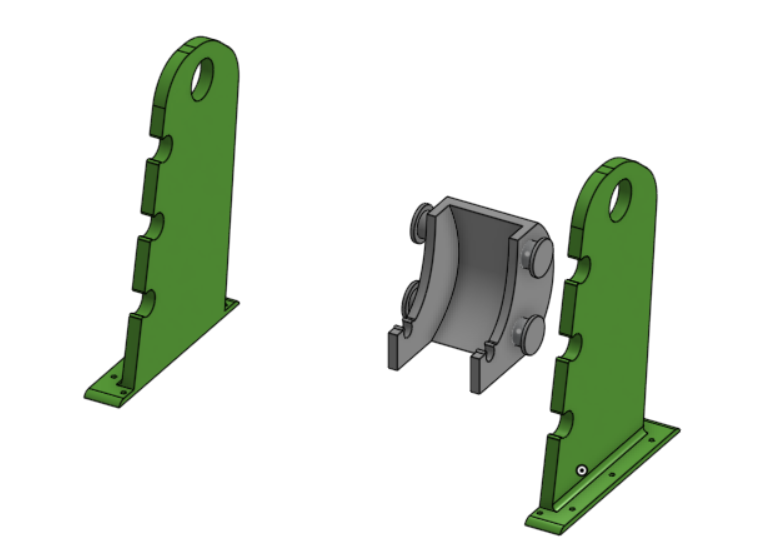
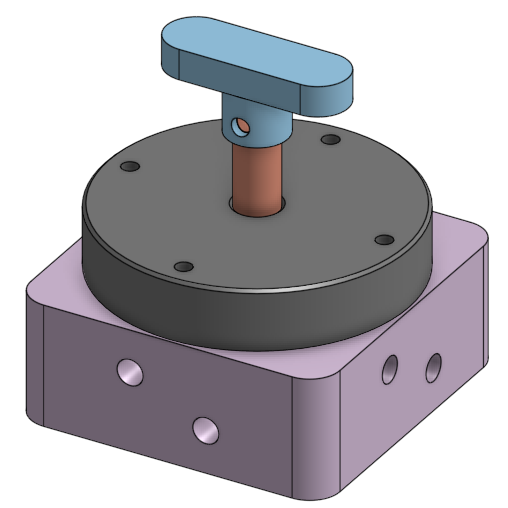
Base of the hydraulic arm
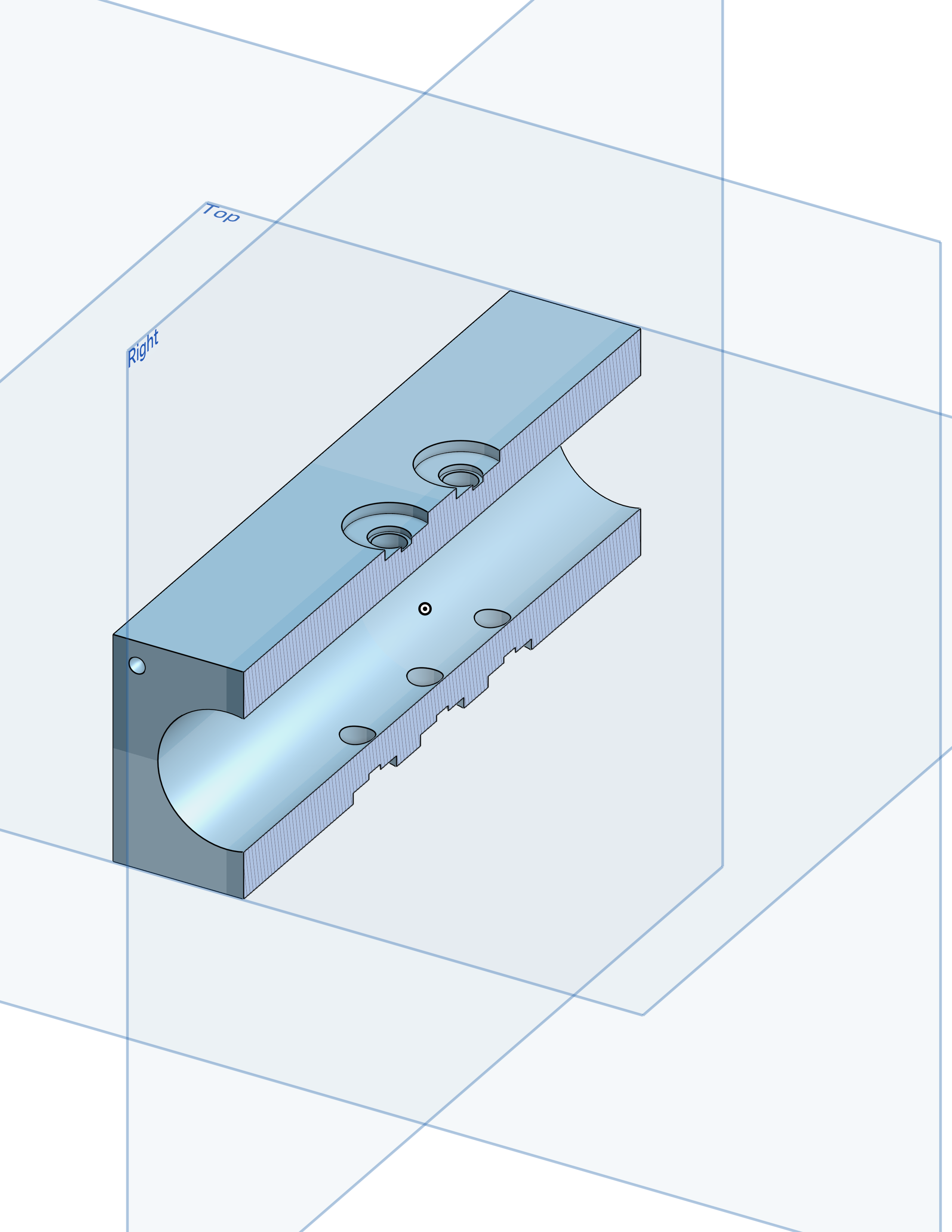
The first step in constructing our hydraulic arm was to create a sturdy base capable of withstanding the forces exerted by the other components. This base was designed to be thick and robust, allowing it to be securely screwed onto a plate.
The gray component is fixed to the green components using three aligned holes. This assembly serves as a mounting point for the actuator, enabling it to rotate. Additionally, a ball bearing will be placed in the top hole of the green component, facilitating smooth rotation between it and the central part of the hydraulic arm.
![]()
central part of the hydraulic arm
This component serves as the central part of the hydraulic arm. The stem tip of the first actuator will be secured in place using a threaded rod inserted into the small hole at the top.
![]()
top part of the hydraulic arm
This component represents the top section of the hydraulic arm, which includes the gripper mechanism.
![]()
This is a simple gripper design that operates solely using the force exerted by the actuator.
![]()
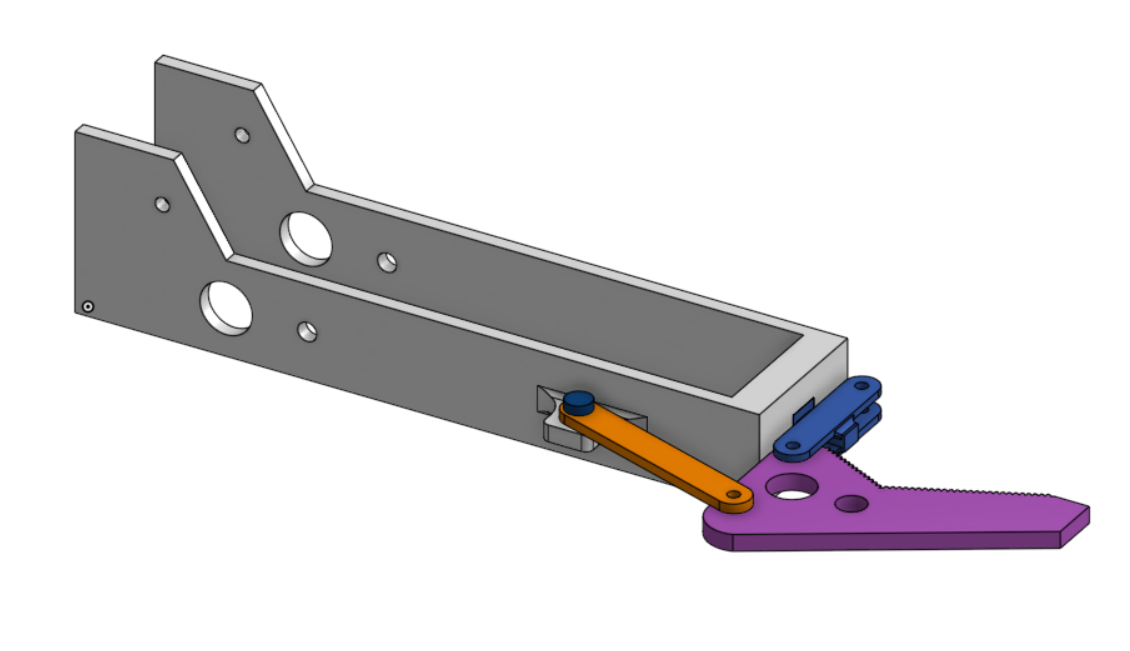
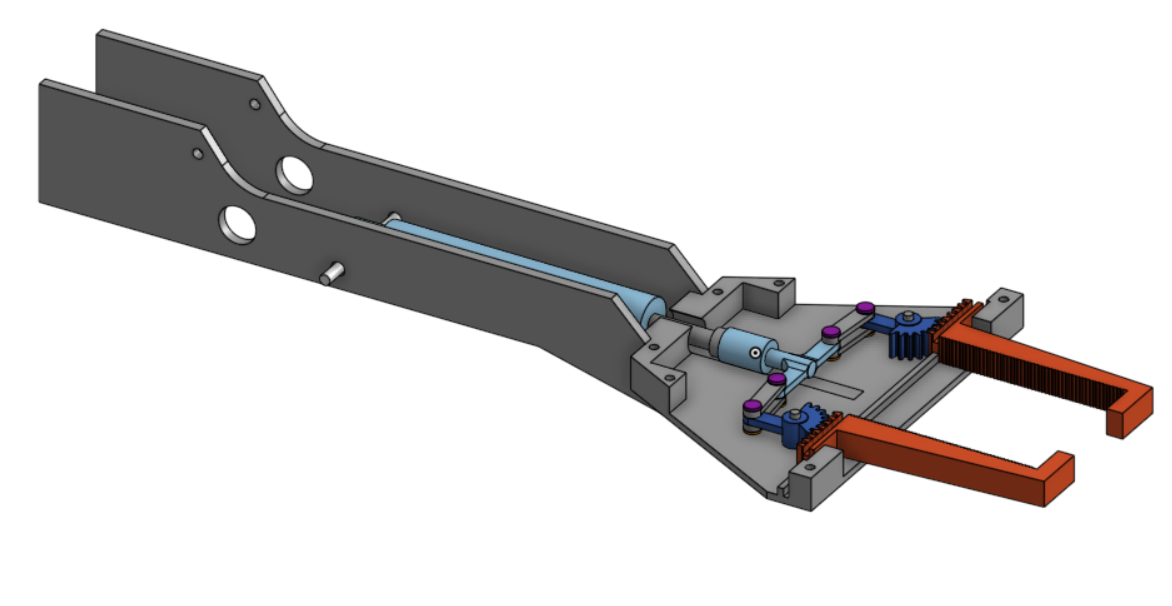
Failed gripper
This was an unsuccessful gripper design that consumed a significant amount of our time. It utilized a round gear and a linear gear to make the orange components slide. However, the design was too large to be 3D printed efficiently.
![]()
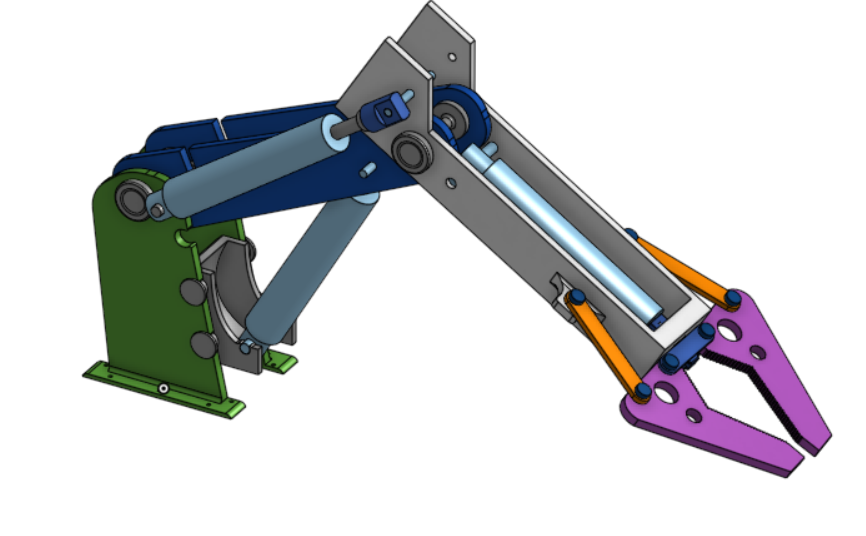
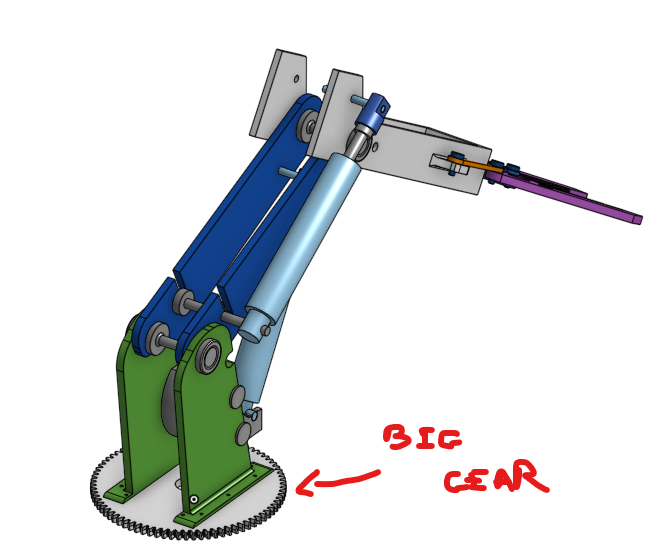
Final assembly
The entire hydraulic arm assembly, including the base, central section, and gripper, is bolted to a large gear. This gear will enables rotational motion of the arm.
![]()
This is the final version of the arm, printed and assembled.
![]()
-
Our approach to fighting leakage
12/08/2024 at 00:00 • 0 commentsAddressing the Leakage Problem
In this log, we’ll explore how we managed the leakage issue in our 3D-printed valve (and the pump) to prevent fluid from spilling everywhere.
Understanding the Problem
Due to the inherent porosity of 3D-printed parts, especially under pressure, fluid inevitably seeped through the layer lines of the valve. This made it impossible to maintain a completely sealed system.
Instead of investing significant time and effort into perfecting a non-leaking 3D-printed valve, we opted for a more practical approach.
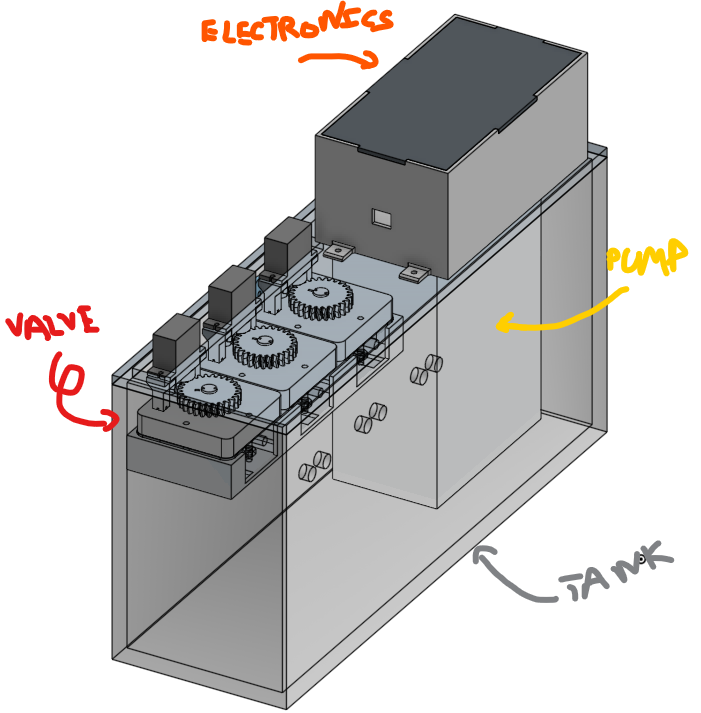
Our Solution
We designed an acrylic hydraulic tank to enclose the valve and pump. This way, any leaks would remain contained within the tank, preventing fluid from spilling externally.
- CAD :
![]()
This tank would:
- Contain both the valve and pump (the pump also leaked).
- Ensure that leakage wouldn’t affect the overall system operation.
Fabrication Process
- Laser Cutting
- We laser-cut the acrylic sheets for the hydraulic tank.
![]()
- Assembly
- The tank was assembled and glued together using epoxy glue.
- Gluing was a challenging and messy process, and achieving a watertight seal required significant effort.
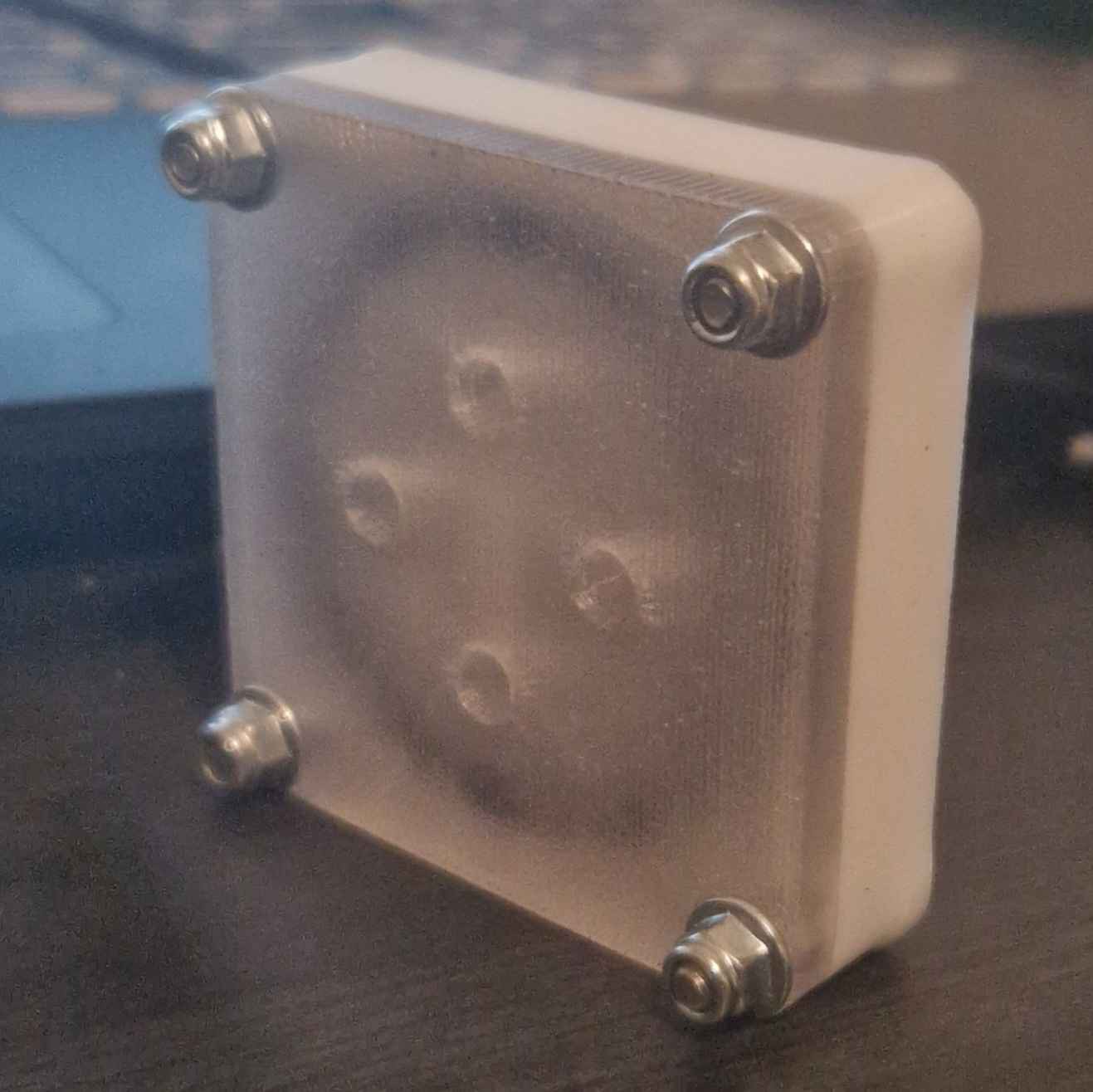
- Assembled Tank:
![]()
![]()
Lessons Learned
After completing the assembly, we realized that using laser-cut acrylic sheets may not have been the best approach.
What We’d Do Differently:
- Instead of laser-cutting and assembling the tank, we would recommend finding a pre-made plastic container with approximate dimensions.
- A ready-made container would have been more reliable, easier to seal, and much less time-consuming.
-
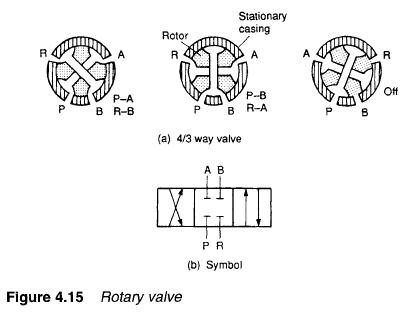
Designing and making a 3D printable 4/3 rotary valve
12/07/2024 at 23:59 • 0 commentsWe discovered the 4/3 rotary valve through this video:
The video even provided technical drawings to recreate the valve. However, the original design relied on CNC machining to fabricate the valve from metal.
Since we only had access to 3D printing, we had to adapt the design:
Initial Design
- CAD Model:
![]()
![]()
- Printed Valve:
![]()
To test the performance, we created a hand-operated version of the valve.
- Test Results:
- The valve performed well, holding pressure up to 5 bar.
- Leaks occurred at two locations:
- Through the plastic base.
- At the fittings.
Encouraged by the results, we addressed these issues and worked on making the valve servo-operated.
Addressing Issues
- Plastic Base Leak
- Switched to PETG instead of PLA, as PETG is less porous.
- Fitting Leak
- Increased clamping force by using longer screws.
First design
- CAD Model:
![]()
- Printed Valve:
![]()
This version featured a 1:1 gear ratio to drive the piston.
- Performance:
- Slightly worse than the first design.
- PETG proved to be more porous, leading to increased leakage.
- Clamping force was still insufficient.
Second design
To maximize clamping force, we redesigned the valve so that screws passed completely through both parts and were secured with nuts on the other side.
- Outcome:
- The valve was now too hard to turn for the 9g servo.
Alternative Design Attempt
We tried a new 4/3 rotary valve design inspired by another video:
- CAD Model:
![]()
![]()
- Printed Valve:
![]()
![]()
- Performance:
- Poor overall.
- Hard to turn for the 9g servo.
- Leaked more and could only hold up to 2 bar.
Realizations and Adjustments
At this point, performance was consistently declining with each new iteration. The valves we printed couldn’t hold more than 2 bar and leaked excessively.
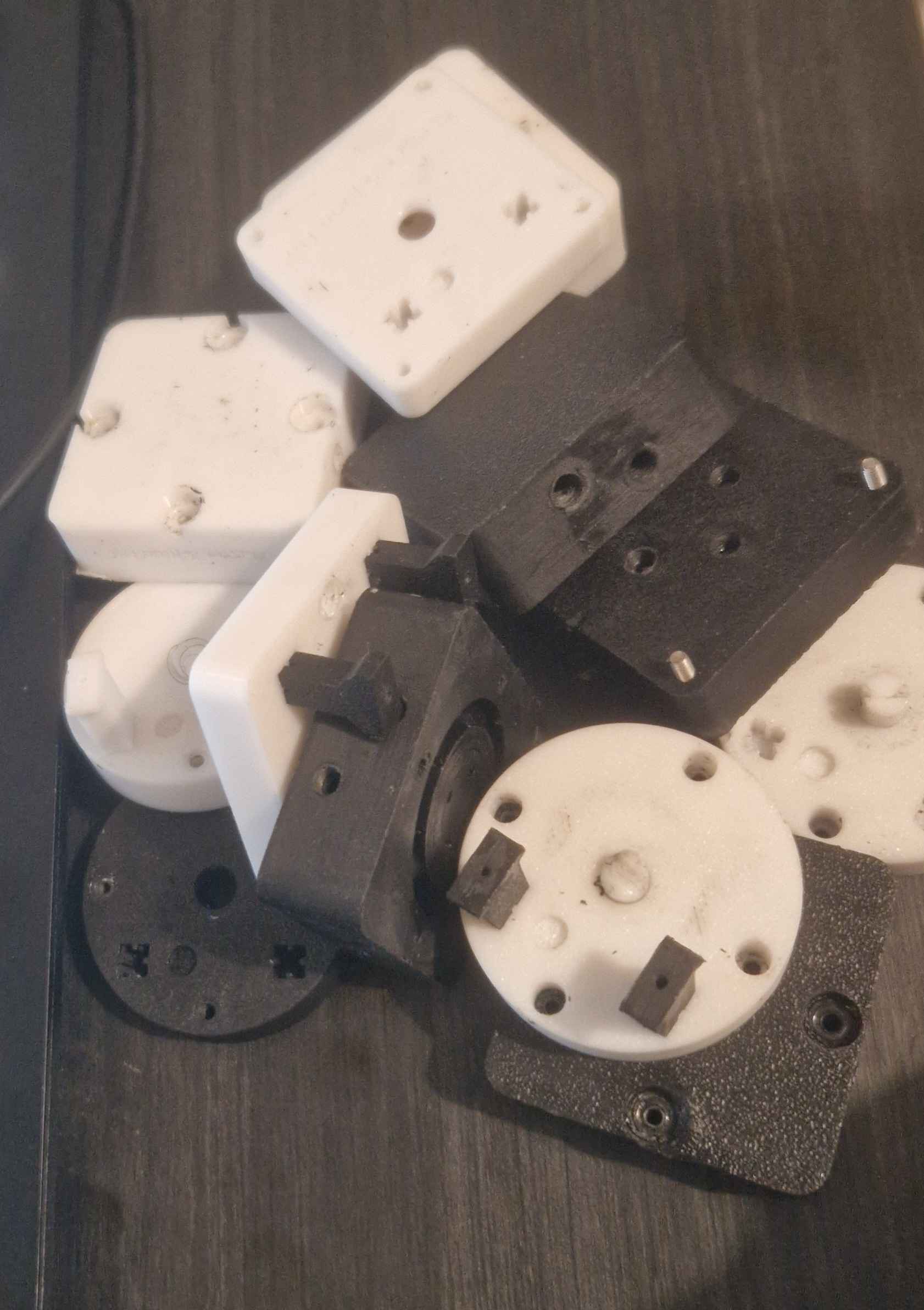
Here’s how many valves we printed during this process:
![]()
We decided to return to our first design, as it had performed the best.
Final Adjustments
- Minor Adjustments:
- Inserted a nut mid-print to improve clamping force
![]()
- Used a larger gear ratio to compensate for higher clamping force and increased turning resistance.
- CAD Model:
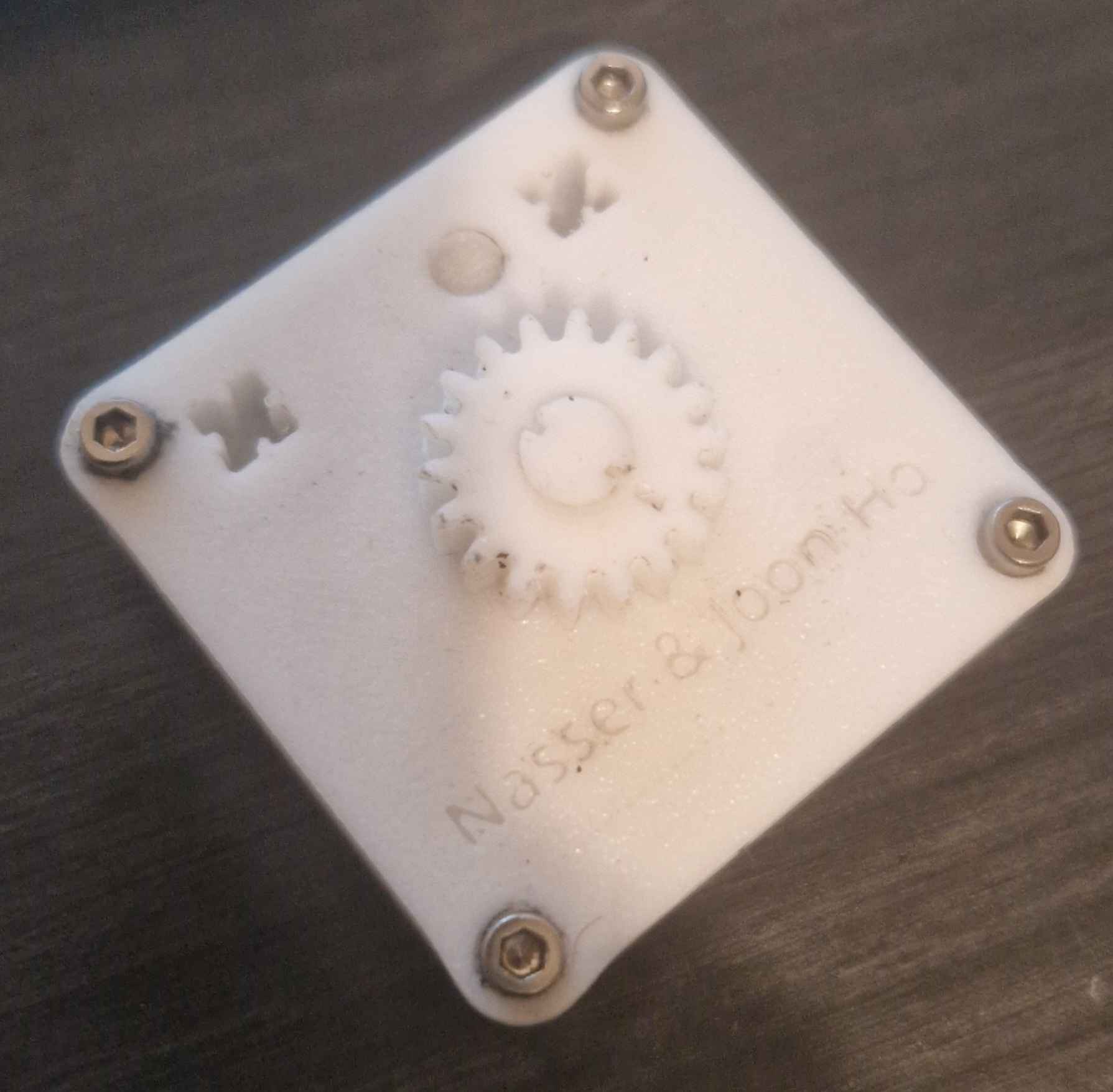
![]()
- Printed Valve:
![]()
- Performance:
- As good as the original design.
- Leaked through the plastic, but we accepted this limitation.
Final Design
To manage leaks, we devised a solution (to be explained in the next log) that minimized their impact.
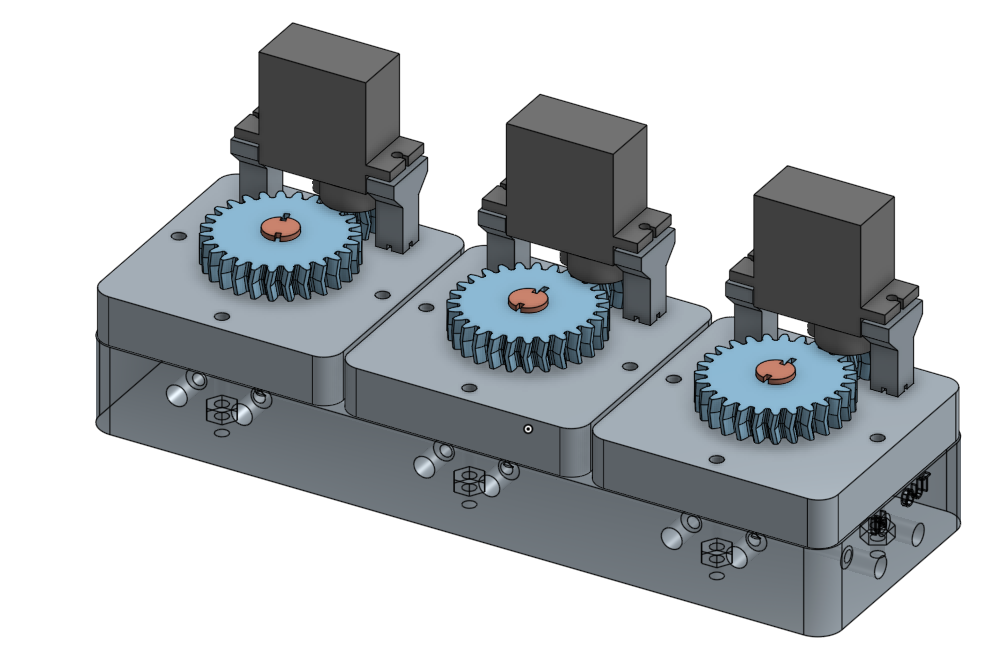
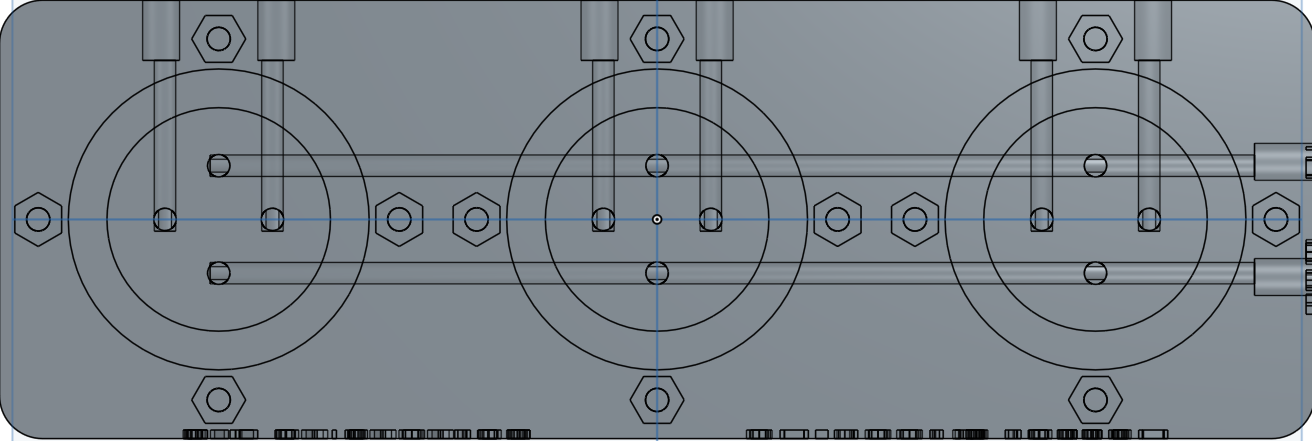
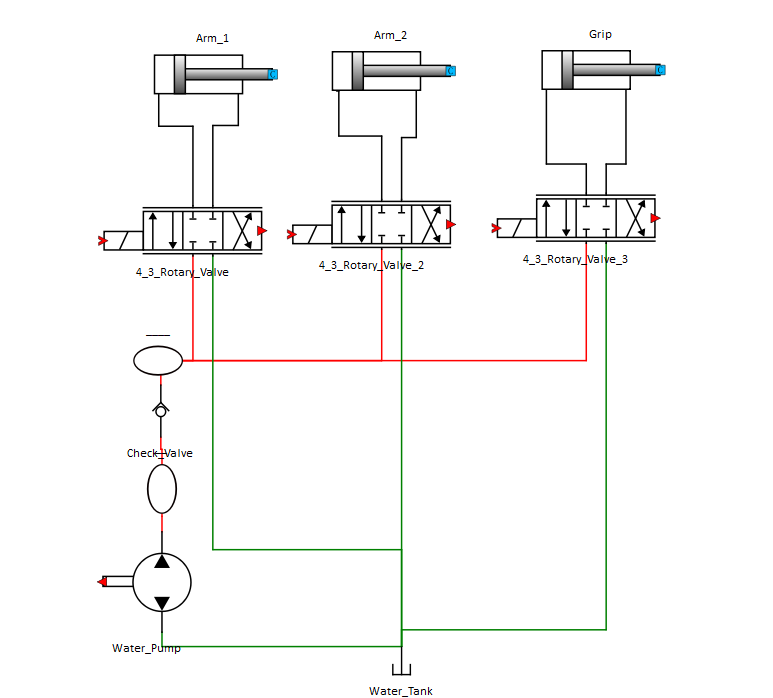
Satisfied with the results, we scaled the valve to control three actuators instead of one.
- FINAL CAD Design:
![]()
![]()
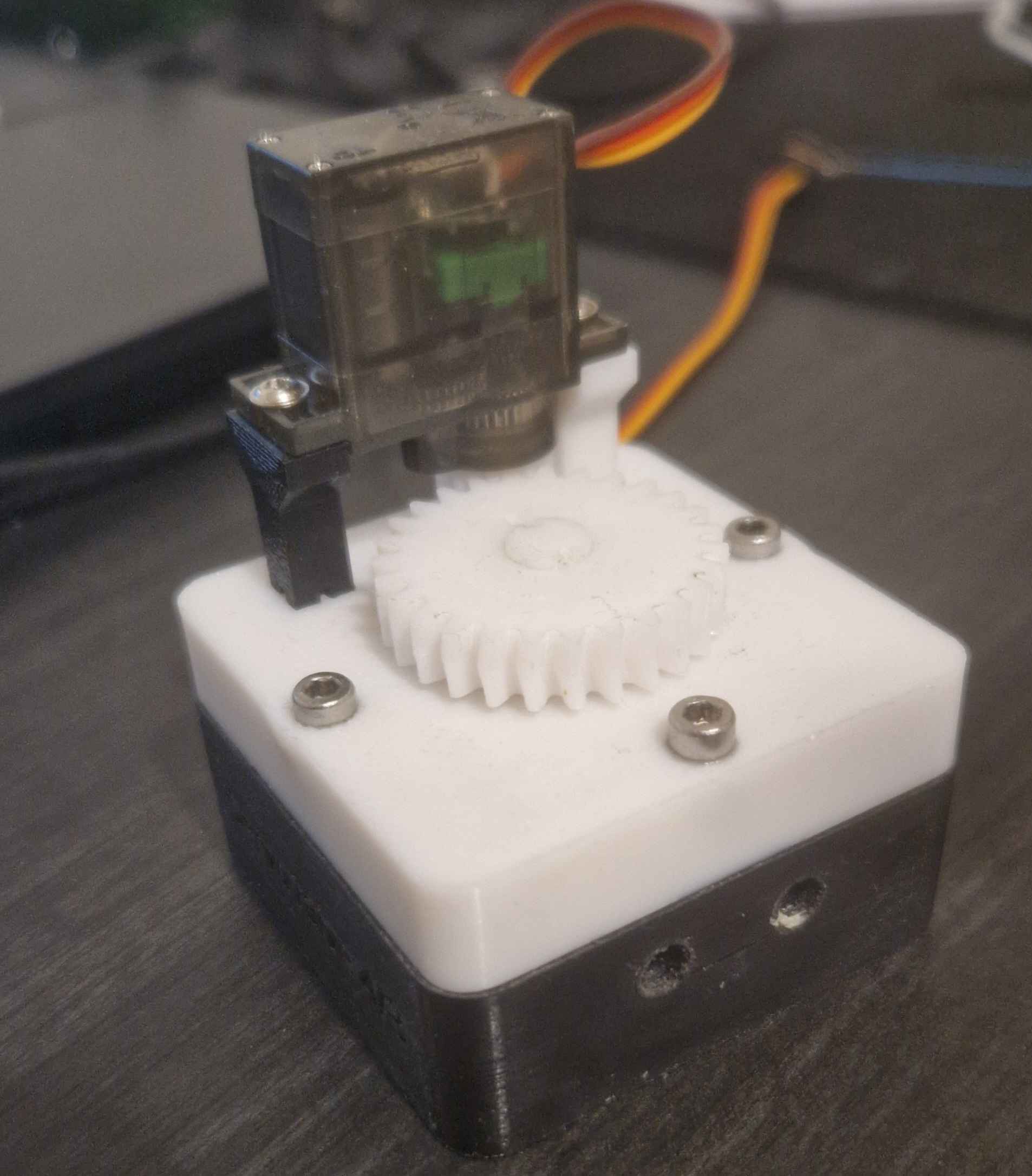
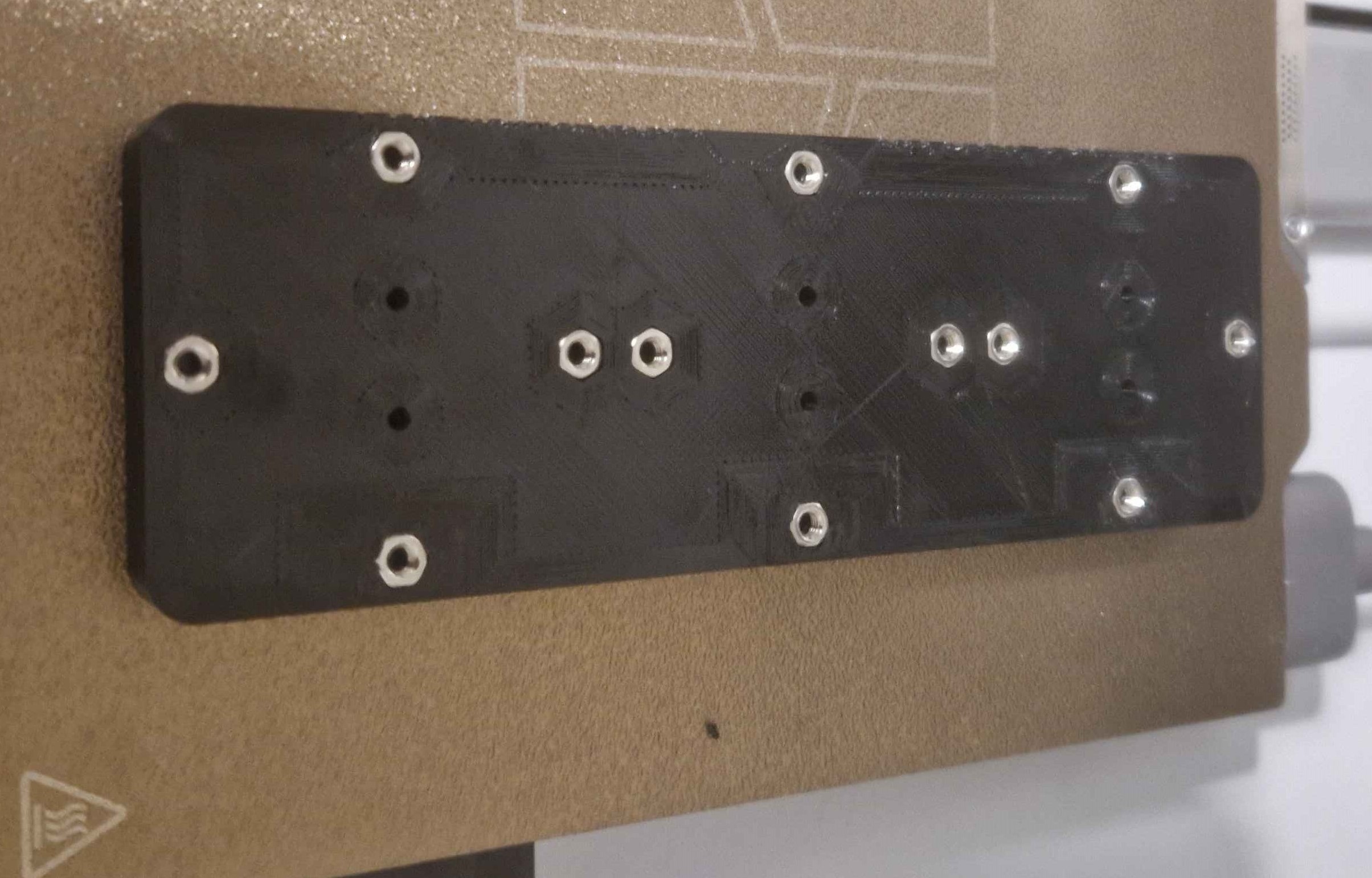
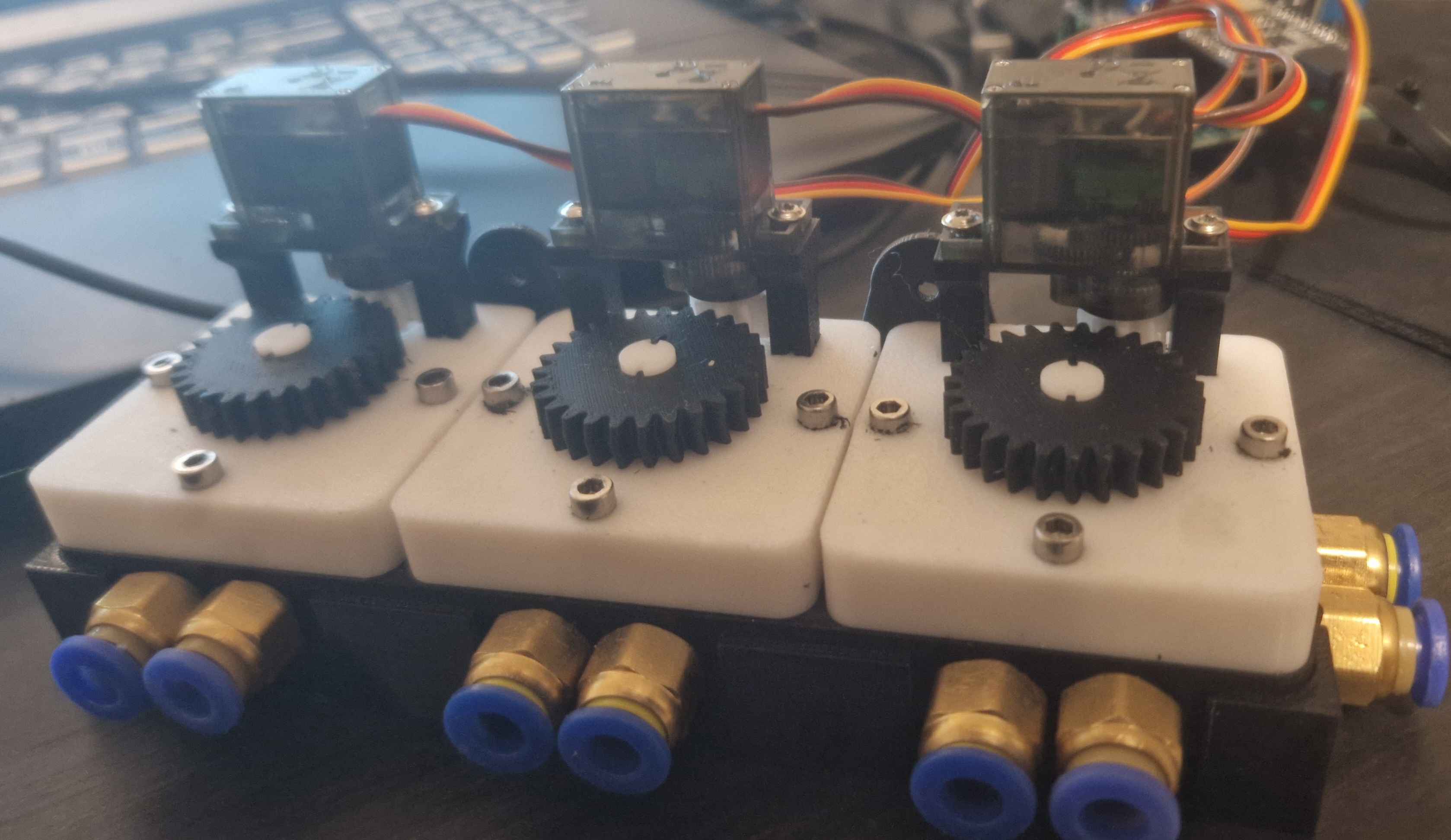
- Printed Valve:
![]()
![]()
-
Going hydraulic AND trying another type of valve
12/07/2024 at 23:56 • 0 commentsAs we mentioned in previous logs, we decided to abandon the 5/3 spool control valve in favor of a different type of valve that would be easier to design and manufacture using 3D printing.
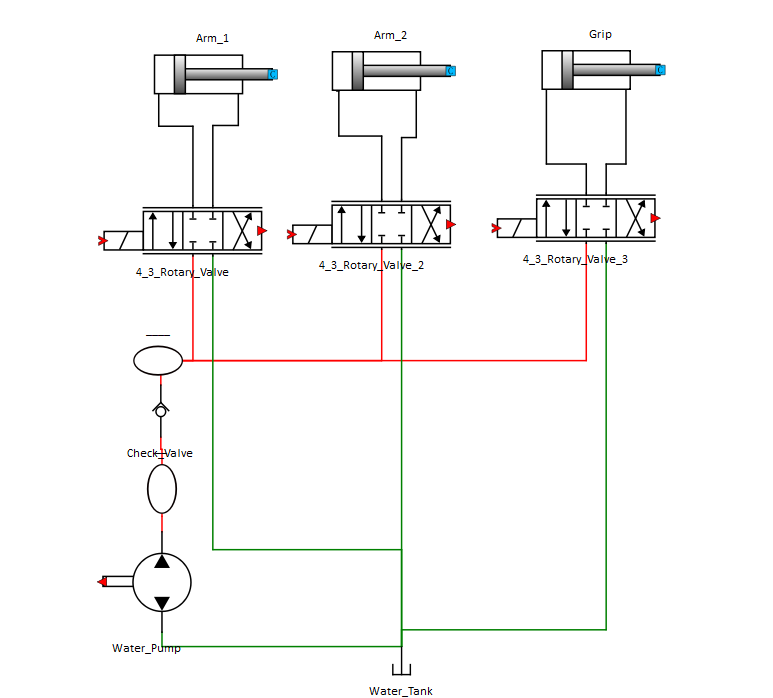
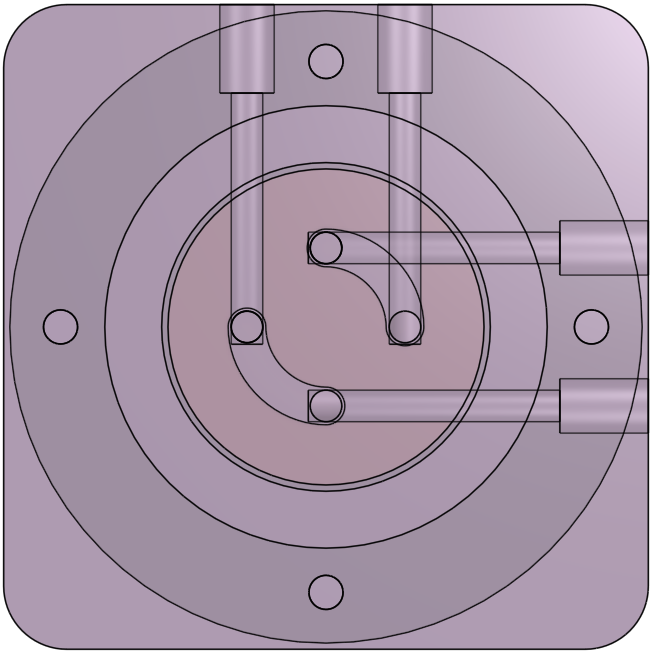
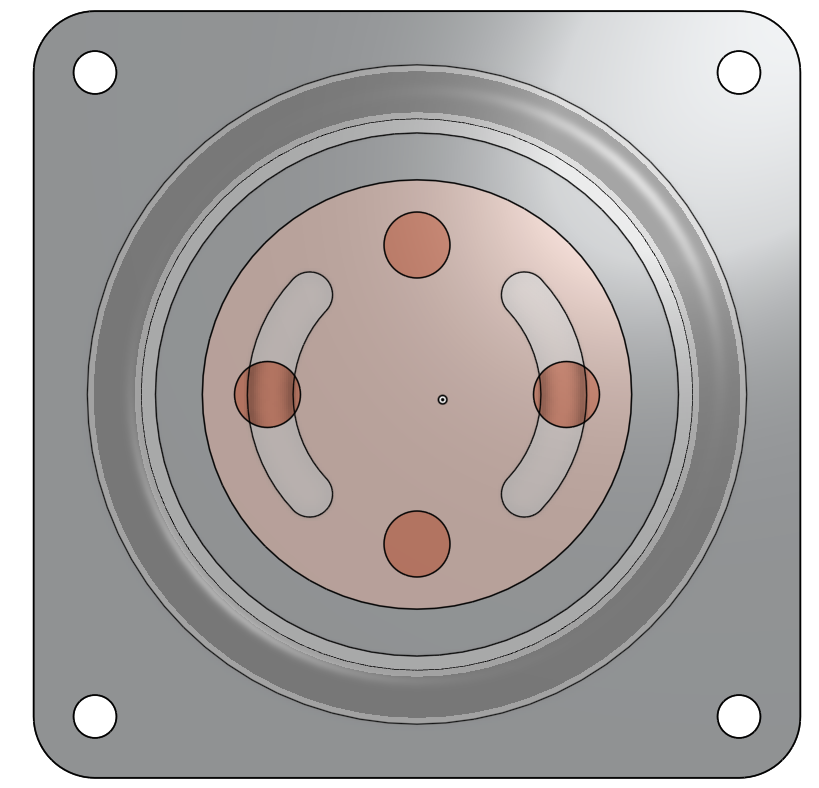
We opted for a 4/3 rotary control valve:
![]()
By rotating the piston within the valve, we can selectively connect and disconnect the channels.
We chose this type of valve because it operates using rotational motion. Since we still plan to use a 9g servo, this design eliminates the need to convert rotary motion into linear motion, simplifying both the design and manufacturing process compared to the linear 5/3 valve.
Additionally, after further discussions, we decided to switch to hydraulics for our project. This decision was driven by two key reasons:
- Precision: Hydraulic systems are much more precise and have less "jankiness" compared to pneumatic systems.
- Improved sealing: Rotational motion is inherently more difficult to seal than linear motion. Air is already challenging to seal properly, especially when using 3D printing technology. Switching to hydraulics, which uses a liquid medium, reduces the risk of leaks and makes sealing the valve more manageable.
![]()
With these considerations in mind, we are now moving on to the design and construction of the 4/3 rotary control valve.
![]()
-
ITERATION 3 of 3D printed 5/3 closed-center control valve
12/07/2024 at 23:54 • 0 commentsThis is our third attempt at creating a 3D-printed 5/3 closed-center control valve.
This time, we had clearly identified our main challenge, thanks to the lessons learned from our two previous attempts: friction.
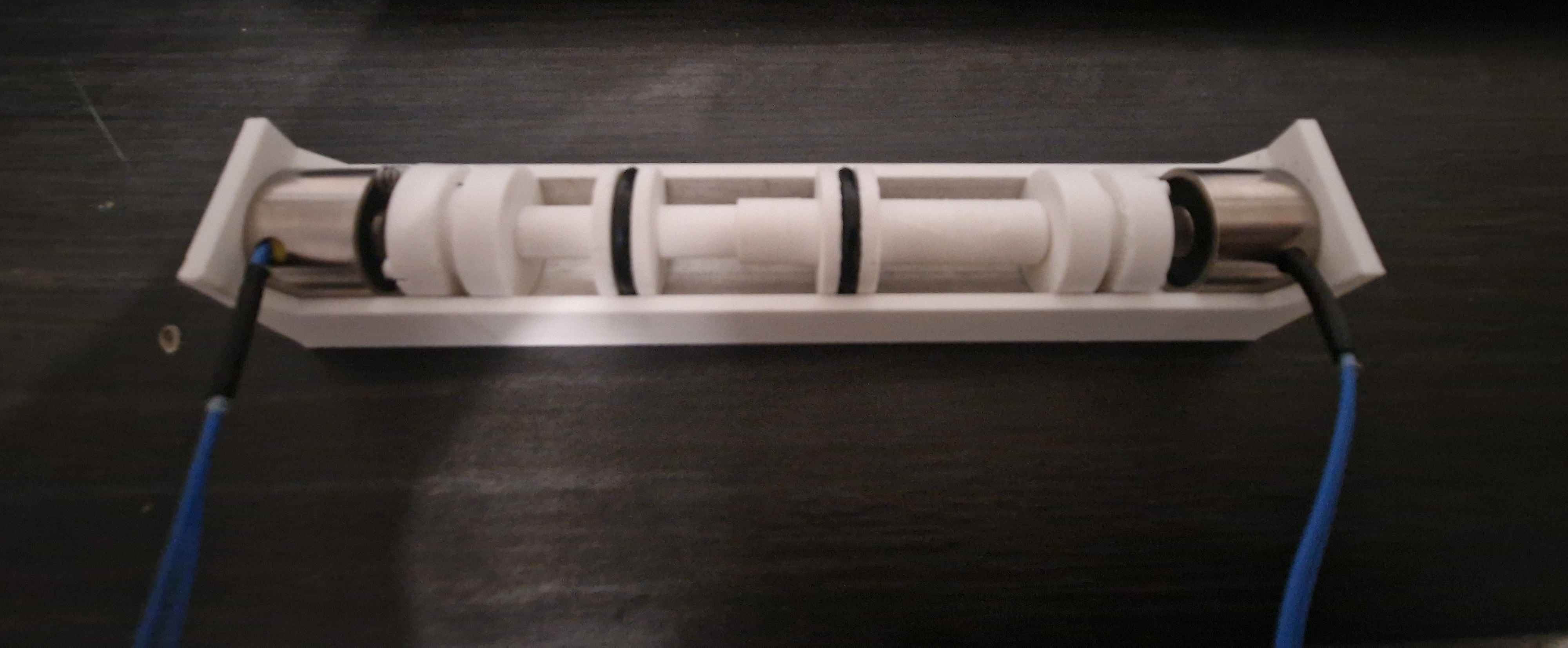
In each attempt, moving the shaft proved impossible because the friction between the sealing ring and the printed surface was too high. Finally, we decided to switch to another material for the valve bore. We opted for a transparent acrylic tube to construct the valve body, as it provides a smooth surface and is see-through, which was an added benefit.
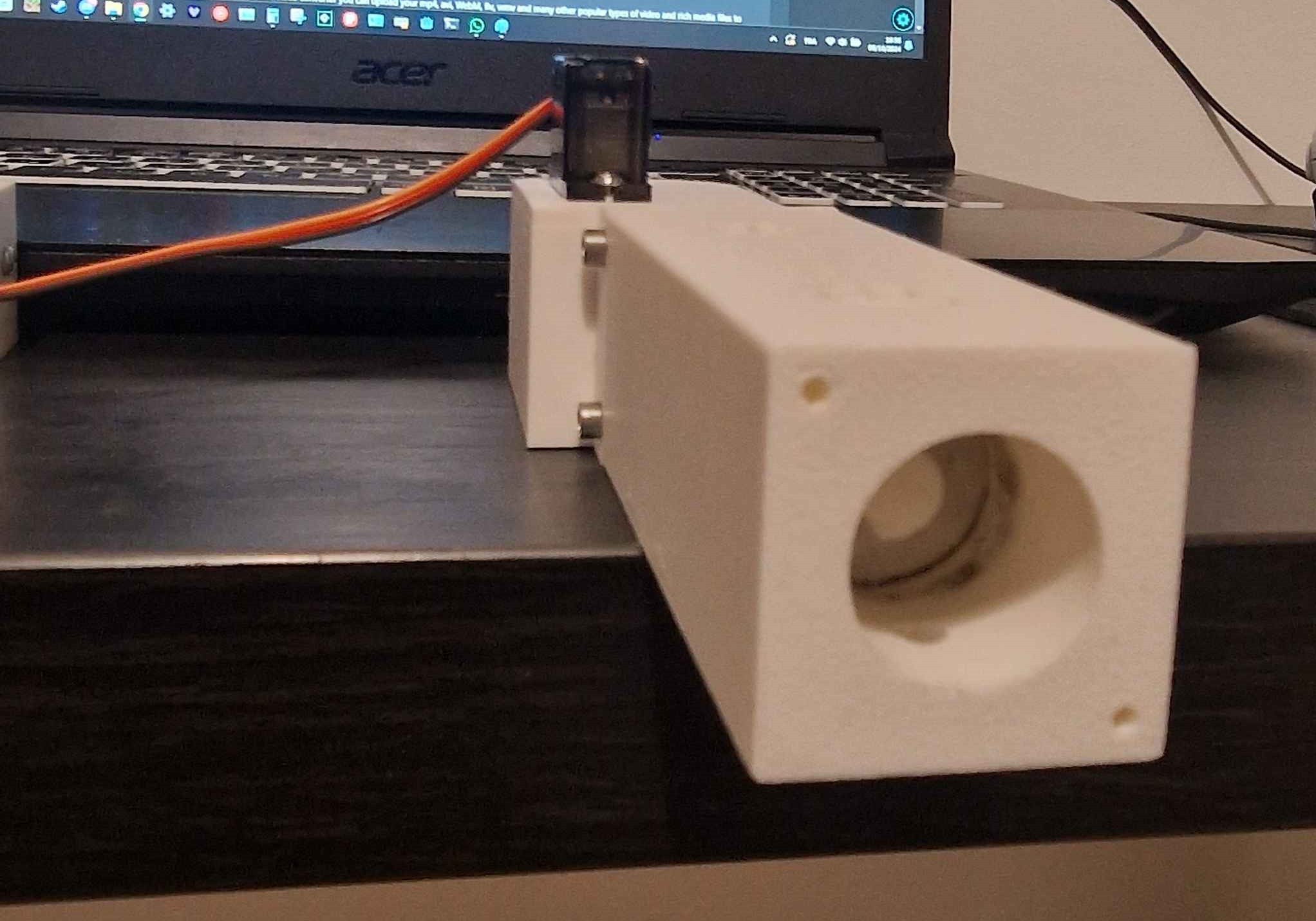
We then printed a new version to test the force required to move the piston with the sealing ring inside the acrylic tube.
![]()
Upon testing, we found that the required force was reduced to around 200–300g when the entire assembly was properly greased. This result indicated that our second iteration, using the servo motor, could be viable with the acrylic tube.
However, in the end, we decided to abandon the 5/3 closed-center control valve design altogether. It was simply too complex to manufacture efficiently with 3D printing. After conducting further research, we discovered another type of valve that we believe will be significantly easier to produce using 3D printing technology. -
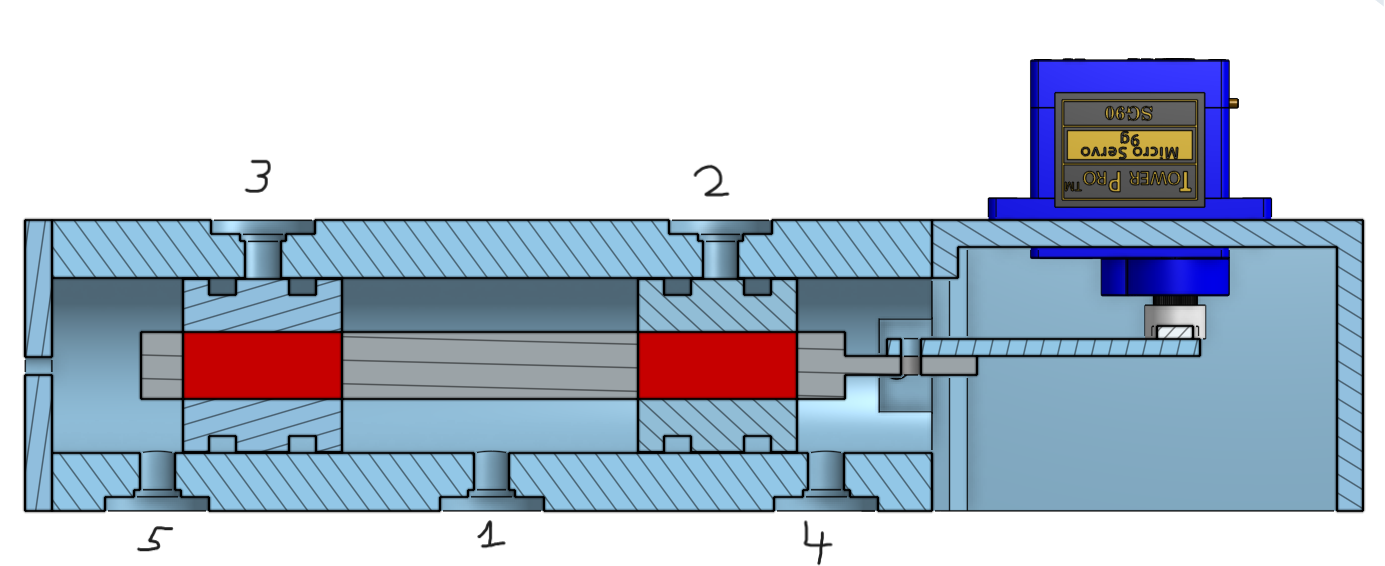
ITERATION 2 of 3D printed 5/3 closed-center control valve
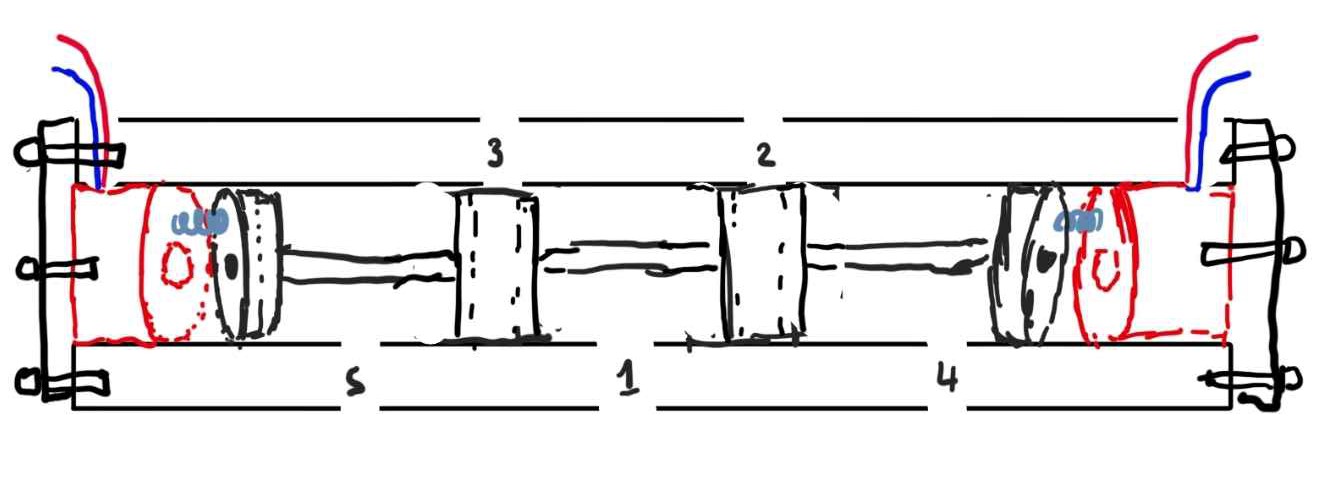
12/07/2024 at 23:54 • 0 commentsThis is our second attempt at creating a 3D-printed 5/3 closed-center control valve.
In this iteration, we avoided relying on strict physical principles like magnetism to move the shaft which can be unpredictable. Instead, we opted for a mechanical approach by using a servo motor coupled with a crank mechanism to drive the shaft. This method provides the reliable advantage of a direct mechanical linkage.
This was our deisgn for this iteration :![]()
- Compressed air inlet
- Air Oultet
- Air Outlet
- Exhaust port
- Exhaust port
The valve consists of a servo motor connected to the shaft via a crank mechanism. The position of the shaft depends on the servo's angle.
It operates as follows:
- Closed position (as shown in the diagram): Servo angle at 90°, blocking all air flow.
- Right position: Servo angle at 0°, connecting hole 1 → hole 2 and hole 3 → hole 5.
- Left position: Servo angle at 180°, connecting hole 1 → hole 3 and hole 2 → hole 4.
This configuration allows us to control or block air flow as needed.
In the CAD software this was how the valve was supposed to opperate :![]()
Everything seemed promising, so we decided to build and test the prototype in real life.
![]()
![]()
However, as you might expect, it didn’t perform as well as it did in the CAD animation.
The first issue was that the entire valve was printed in matte PLA, which tends to produce relatively rough surfaces. Adding a sealing ring to the piston on the shaft made movement extremely difficult due to increased friction.
Additionally, our design relied on a 9g servo motor to keep thedesign cheap. Unfortunately, this servo lacked the strength to move the shaft under such high friction conditions, even pushing the shaft with our was already a challenge.
We then decided to change the design once again.
-
ITERATION 1 of 3D printed 5/3 closed-center control valve
10/09/2024 at 15:25 • 0 commentsThe project was supposed to be a pneumatic robotic arm, but has been modified into a hydraulic arm, using a water pump instead of an air compressor and air tank! This doesn't change much in terms of design, because like air, water remains a fluid. this note is to avoid any confusion when reading the first project logs
Our first attempt at building a 5/3 closed-center control valve.
After watching videos and reading articles about control valves, we understood how they work. Basically, you move a shaft with a piston to close or open the passage of air or fluid.
This is our first design:
![]()
- Compressed air inlet
- Air Oultet
- Air Outlet
- Exhaust port
- Exhaust port
The valve consists of two electromagnets on each side of the valve, two powerful permanent magnets at each end of the shaft, and two compression springs between the permanent magnet and the shaft.
It work as follow :
The shaft can be in the :
- Closed positoin (depicted in drawing)
- Right position (connecting hole 1->2 and 3->5)
- Left position (connecting hole 1->3 and 2->4)
Allowing us to control/block air flow
To move the shaft, the electromagnets will try to pull/push the magnet at each end of the shaft.
For exemple to make the shaft move :
- Left :
- The left electromagnet will pull
- The right electromagnet will push
- Center :
- The left electromagnet will push
- The right electromagnet will push
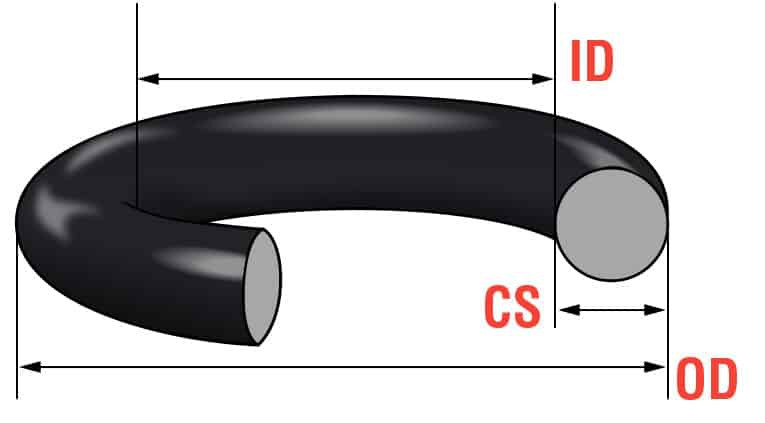
BEFORE WE CONTINUE I WOULD LIKE TO TALK ABOUT THE SEAL USED IN THE VALVE
It goes without saying that a control valve whose role is to block and direct the flow of gas or fluid has to be perfectly sealed, which is, I think, the most difficult part of making the control valve, especially because we try to 3D print it.
We used O-rings to seal the valve.![]()
And although it sounds simple, it's also very complicated: we had to learn about piston groove design, O-ring compression, etc....
Fortunately, there were a ton of resources on how to design the groove for a dynamic application based on bore diameter and piston diameter.Here were some helpfull website :
This is still the main difficulty encountered in valve making, as it induces a lot of friction and the need to use a lot of force to move the shaft, leading many prototypes and iterations to fail because the method used to move the shaft didn't have enough force.
Or it just wasn't sealing enought.
I made this parenthesis because I don't think I'll come back to it in the next logs because I don't find it very interesting to talk about the dimensions of an oring groove for each prototype.
Now having an idea we went on to make a first prototype :
![]()
The aim of this first prototype was to see if the tree could move.
But thanks to this, we began to see the many problems with this design;
First of all, the force and distance of the pull/push:
These electromagnets were advertised for a force of 2.5 kg, but what we didn't know was that this 2.5 kg force only applied in the event of direct contact with the electromagnet.
With this prototype we were reminded of the Inverse-square law
In science, an inverse-square law is any scientific law stating that the observed "intensity" of a specified physical quantity is inversely proportional to the square of the distance from the source of that physical quantity.
For this design this means that the displacement of the shaft can only be very small <10mm, otherwise the pull/push force of the magnet cannot overcome the friction and/or spring force and cannot move the shaft.
Such a small displacement wasn't ideal because all the holes would have to be very close together, risking leakage in case the shaft didn't move exactly to the right position.
Nevertheless, here's the prototype in action:![]()
As you can see, it worked, but we couldn't use it in a real-life situation for one simple reason: friction ;
The aim of the first prototype was to test whether the shaft was able to move, but when we tried to make a second prototype of this design with a sealed housing, the magnet simply couldn't win against the friction between the seal and the bore.![]()
![]()
We then decided to abandon this desiign, because it had too many flaws.
-
Design and manufacture of a 3D printed 5/3 closed-center control valve
10/09/2024 at 14:00 • 0 commentsWe took on the challenge of making a 3D-printed 5/3 closed-center control valve because we couldn't find a cheap and/or small valve, and we hadn't found anyone who had made a DIY version.
![]()
We researched the inner workings of such a component and found an excellent video that helps us understand perfectly:So now we were ready to start designing our own !