 alexw
alexw-
1Build notes
- Given vibrations throughout the glider due to the stepper motors, I would recommend using threadlock or locknuts throughout the build.
- Most of the parts are parameterisable and should be adjusted to your printer. However, there will be parts of the prints that require a small amount of sanding/drilling to make sure that holes are the correct size.
- If there are any errors with the build instructions or CAD components (or if you have any CAD part name suggestions - I lost imagination after a while), leave a message and it shall be fixed as quickly as possible. All suggestions are very welcome.
- On the Hackaday page are a set of STL files with custom values for my particular printer. While these may work for your printer, it is suggested to print the files with custom part variables for your printer, determined by printing a set of test pieces as outlined further on in the instructions.
- As the Hackaday’s project editor is slow to work with, I made all of the instructions on a google docs documents. When I ported the instructions across all the images became slightly out of proportion and there are too many images to manually change them all. You can view the images in the correct proportions if you click on the image. You can also view all of the images on the Dropbox image link
-
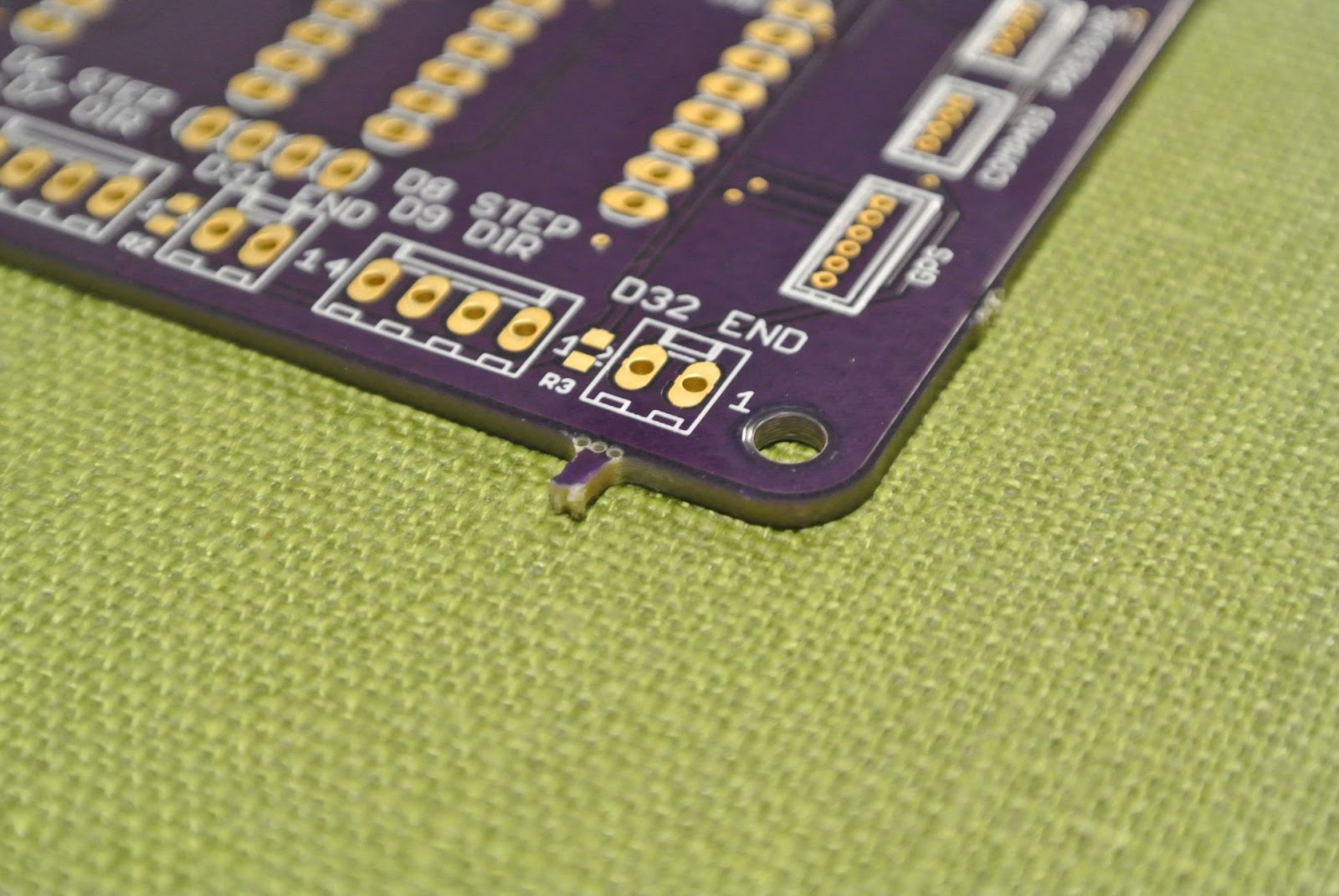
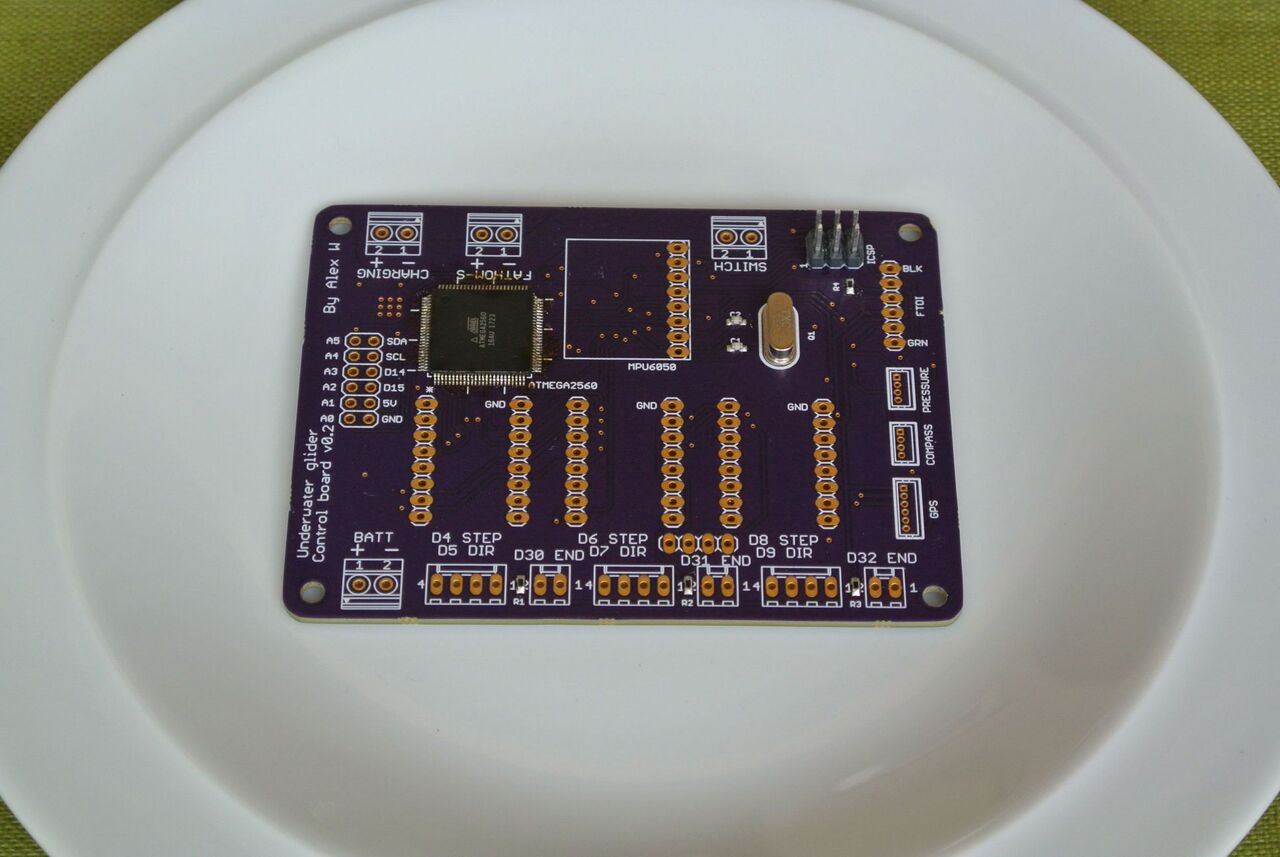
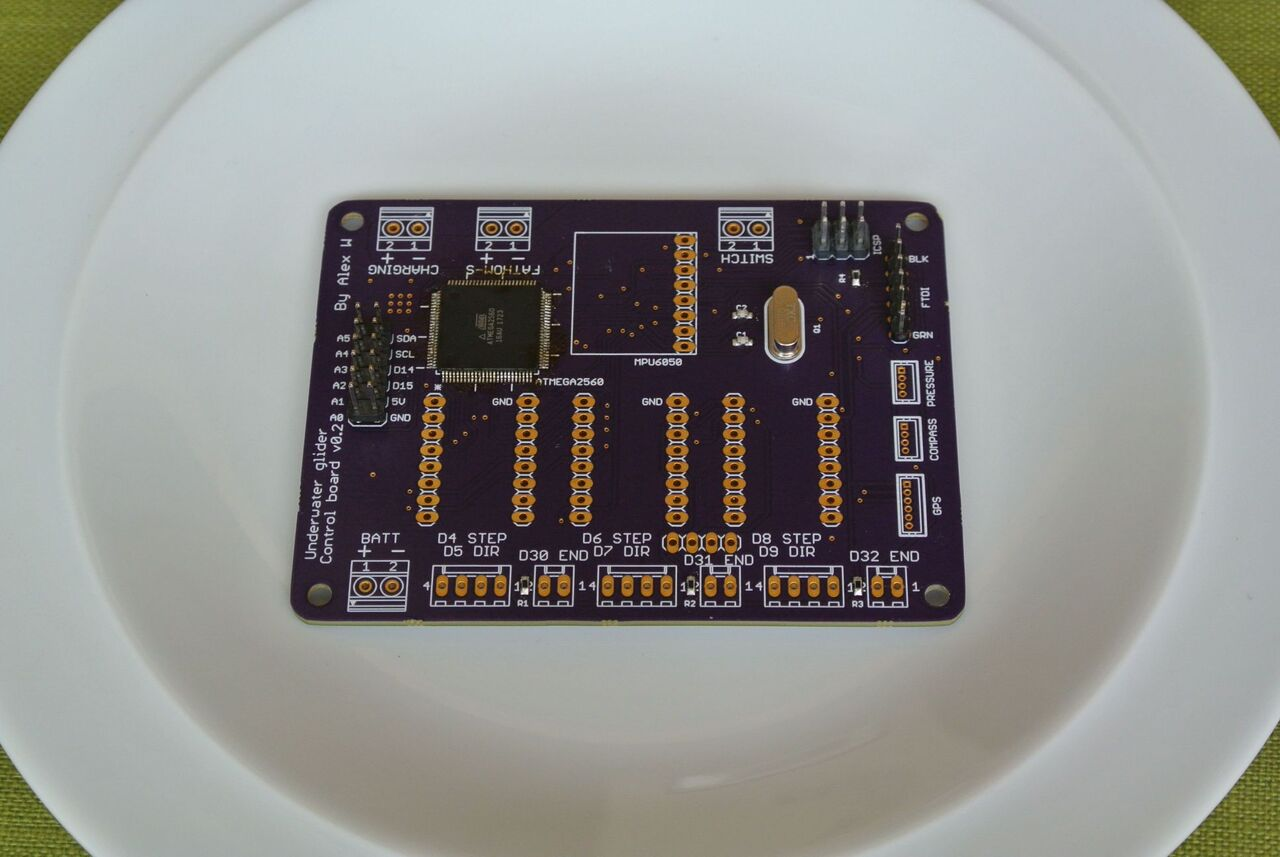
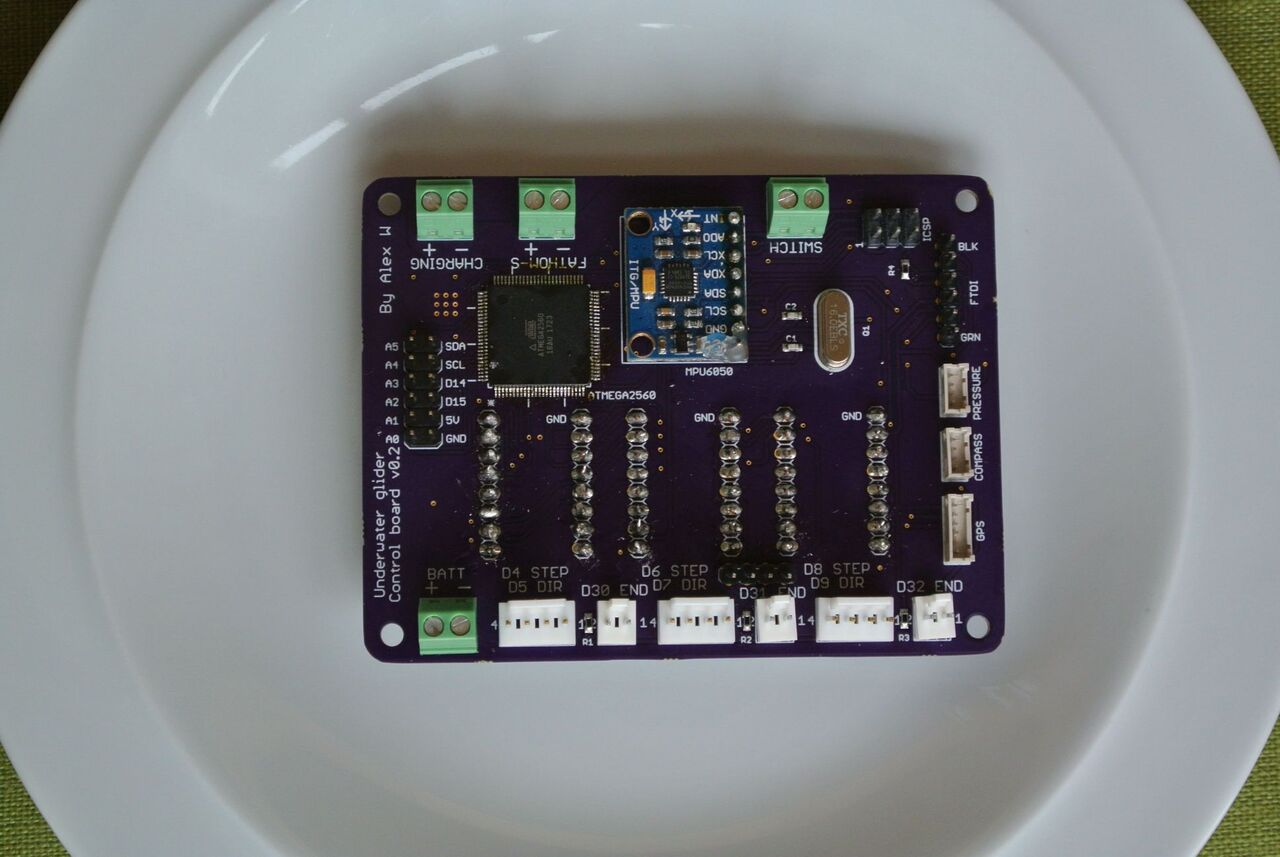
2Preparation of PCBs
Some board services leave tabs on the PCBs, so you can remove these and sand the edges of the board smooth.

-
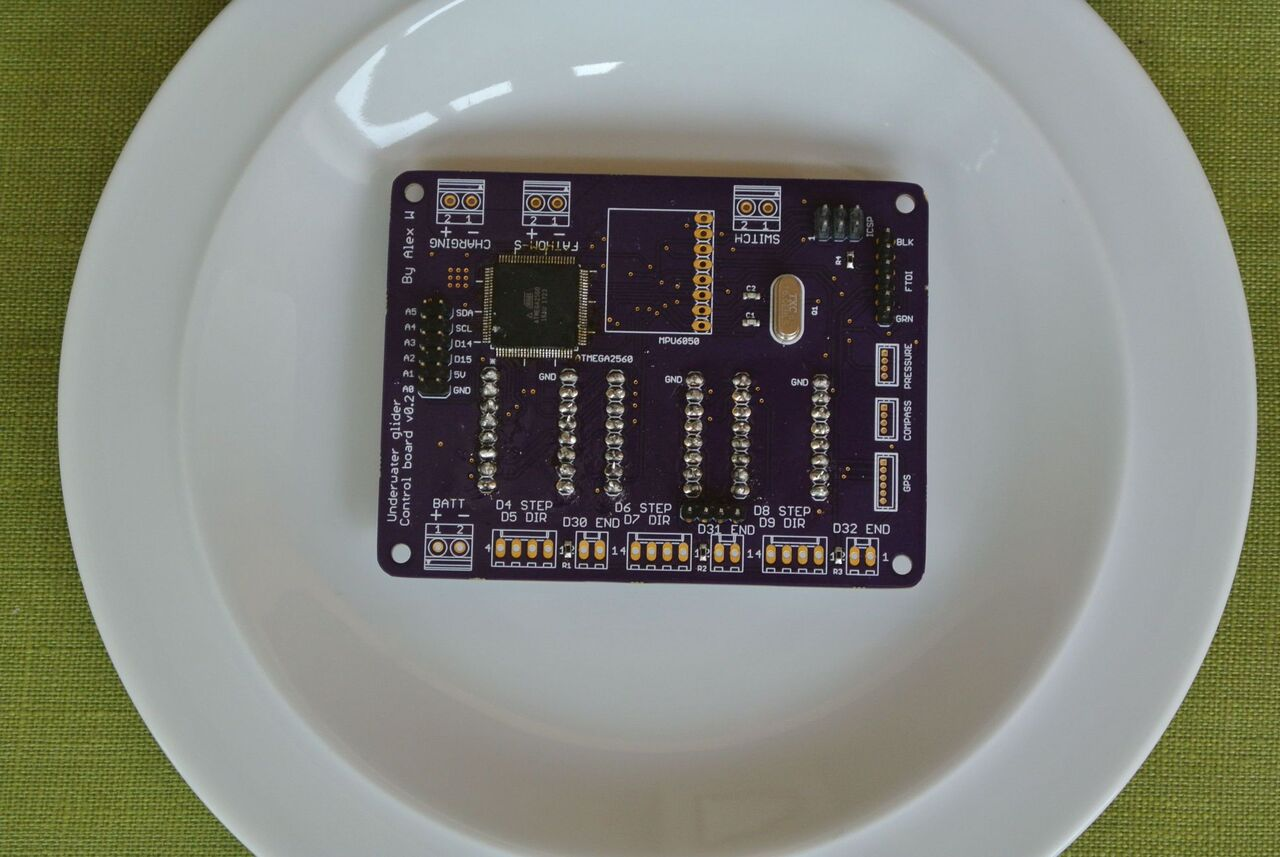
3Soldering SMD components
This step uses hotplate surface mount soldering, a more detailed example of this technique, including video, can be found here at hobbytronics.
Using a non-food hotplate, heat the PCB slightly, this allows the solder paste to be applied more thinly as it is less viscous and comes out of the syringe more easily.
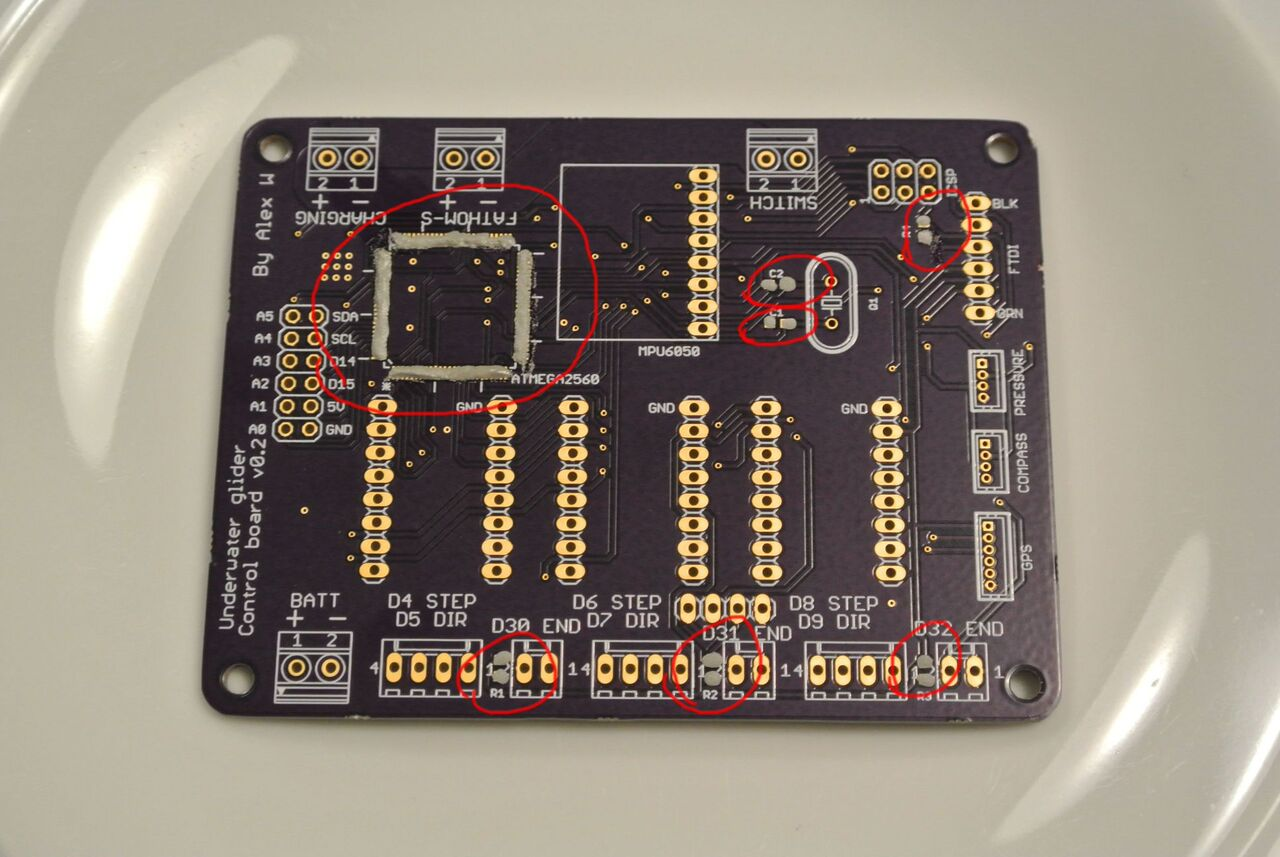
Apply the solder paste to the SMD pads, as shown highlighted in red. Use the tip of the solder paste extruder/cotton buds/kitchen towel to remove excess solder paste from the pads. Surface tension will cause the solder to go onto the pads on the atmel chip, so don't worry about connecting them all at this stage.
Using tweezers, place the SMD components onto the board. R1/R2/R3/R4 are 10KΩ resistors and C1/C2 are the 22pF capacitors. Only the atmel chip is orientation specific, so make sure that the alignment dot on the chip lines up with the star on the board. Make sure that the atmel chip's pins line up with the pads on the board.
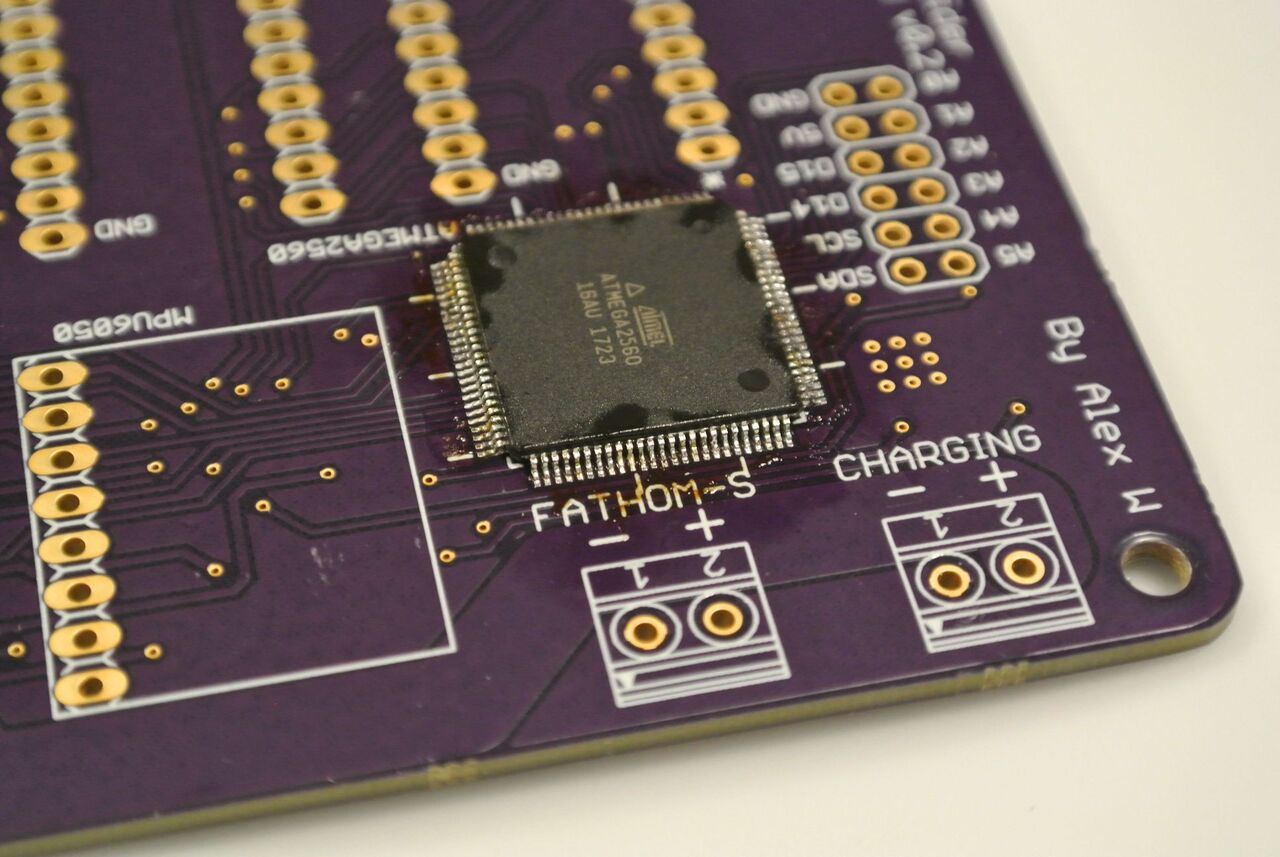
In order to form the solder joints, heat the hotplate up to its maximum setting and watch the pads closely. When the solder paste gets near the required temperature, it will turn into a liquid, and it will then gain the silver solder appearance as it continues. Make sure that all of the solder joints have been formed before removing the board from the heat.
Some of the pins of the atmel chip will have bridged, so use desolder braid to remove the excess solder causing bridging. Use a multimeter continuity tester to check that no pins are connected to the pin next to them.
-
4Preperation for bootloader burning
Solder the 6 pin ICSP header and 16MHz crystal to the board and trim the legs of the crystal.
On a 6 pin ICSP jumper cable, remove the 5th wire and attach it to a single male header pin (and heatshrink). This wire will be used as a reset pin for the programming board.
-
5Burning the bootloader
Before the build continues, bootloader has to be burnt onto the Atmel chip, to ensure that the chip is working and there are no errors so far.
These instructions use the bootloader by Nick Gammon. More thorough instructions of this process by Nick Gammon can be found here.
Connect the control board to a standard Arduino using the custom programming header, The 5th wire connects to pin D10 of the Arduino. (I think I used wire 2 instead of wire 5, so don't use this image as a reference for orientation of the headers)
Download the latest version of the source code from Nick Gammon's Arduino GitHub. The particular sketch we're using is in the "Atmega_Board_Programmer" subdirectory.
Upload the Atmega_Board_Programmer sketch to the Arduino and open the serial monitor. The following should appear:
Atmega chip programmer. Written by Nick Gammon. Entered programming mode OK. Signature = 0x1E 0x98 0x01 Processor = ATmega2560 Flash memory size = 262144 bytes. LFuse = 0xFF HFuse = 0xD8 EFuse = 0xFD Lock byte = 0xCF Bootloader address = 0x3E000 Bootloader length = 8192 bytes. Type 'G' to program the chip with the bootloader ...If this did not appear, try rotating the ICSP header on the control board. If this doesn't help either check the solder joints for shorts. If this doesn't help, you may need to produce a new control board.
If all went well, press 'G' and the Arduino will burn the bootloader onto the ATMEGA2560 and the following will appear:
Erasing chip ... Writing bootloader ... Committing page starting at 0x3E000 Committing page starting at 0x3E100 Committing page starting at 0x3E200 Committing page starting at 0x3E300 Committing page starting at 0x3E400 Committing page starting at 0x3E500 Committing page starting at 0x3E600 Committing page starting at 0x3E700 Committing page starting at 0x3E800 Committing page starting at 0x3E900 Committing page starting at 0x3EA00 Committing page starting at 0x3EB00 Committing page starting at 0x3EC00 Committing page starting at 0x3ED00 Committing page starting at 0x3EE00 Committing page starting at 0x3EF00 Committing page starting at 0x3F000 Committing page starting at 0x3F100 Committing page starting at 0x3F200 Committing page starting at 0x3F300 Committing page starting at 0x3F400 Committing page starting at 0x3F500 Committing page starting at 0x3F600 Committing page starting at 0x3F700 Committing page starting at 0x3F800 Committing page starting at 0x3F900 Committing page starting at 0x3FA00 Committing page starting at 0x3FB00 Committing page starting at 0x3FC00 Committing page starting at 0x3FD00 Committing page starting at 0x3FE00 Committing page starting at 0x3FF00 Written. Verifying ... No errors found. Writing fuses ... LFuse = 0xFF HFuse = 0xD8 EFuse = 0xFD Lock byte = 0xCF Done. Type 'C' when ready to continue with another chip ...If all went well, the ATMEGA2560 now has a bootloader and can be programmed directly.
-
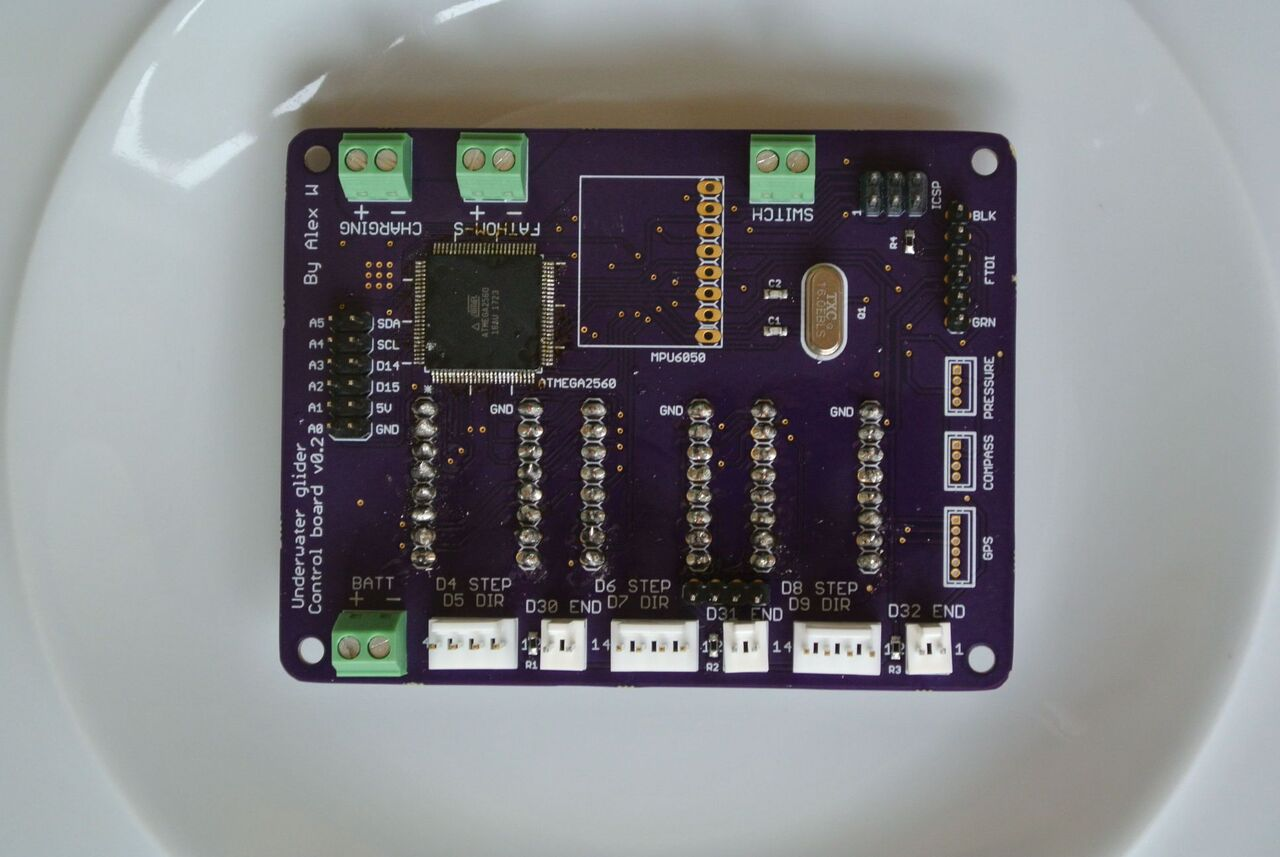
6Through hole components
Attach the 6 pin FTDI header and the 12 pin I/O header.
Attach all 6 of the 8 pin female stepper control board headers at the back of the board. Plugging in a stepper control board ensures that the pins are correctly aligned and you're able to plug in the stepper motor control boards.
Attach the 4 pin male header for the Fathom-S board.
Attach the stepper motor headers and the endstop headers. Make sure that the orientation of the connectors is correct (refer to the image for the correct orientation).
Attach the 4 screw terminal blocks, making sure that the orientation is correct.
Attach the DF13 headers, making sure that the orientation is correct.
Attach the MPU6050, make sure that the MPU PCB is parallel to the control board PCB.
-
7Pogo connector boards
Solder the pogo pins to the “Pogo connector male” board. Make sure that the pogo pins go through the board from the back (side with text), refer to the image below. Also make sure that there is no solder fixing the tips of the pogo pins in place. Solder the 6 and 4 pin male 0.1” headers to both the “Pogo connector male” and “Pogo connector female” boards, with the headers being available to attach connectors on the side with the text.
-
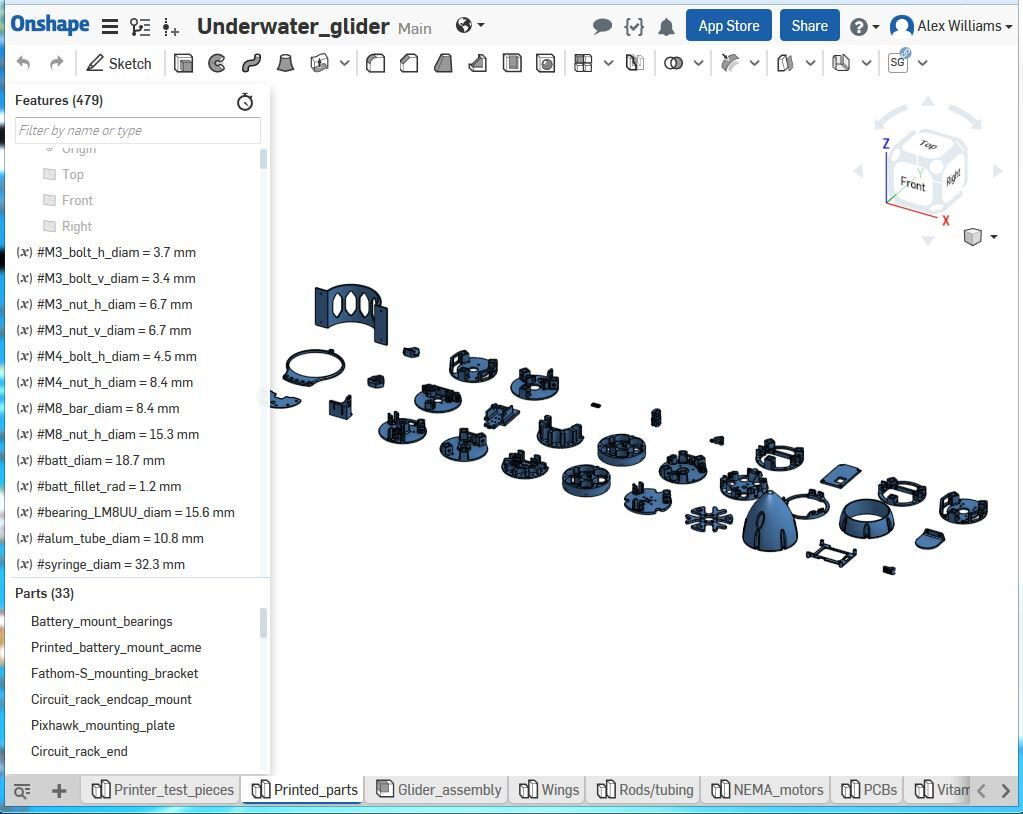
83D printed components
In the Onshape document, there will be a tab called “Printer_test_pieces” at the bottom, go to this page and select all the parts in the left hand part selector pane. Right click and export all the parts as STl files. Make sure that the parts are being exported as individual files.
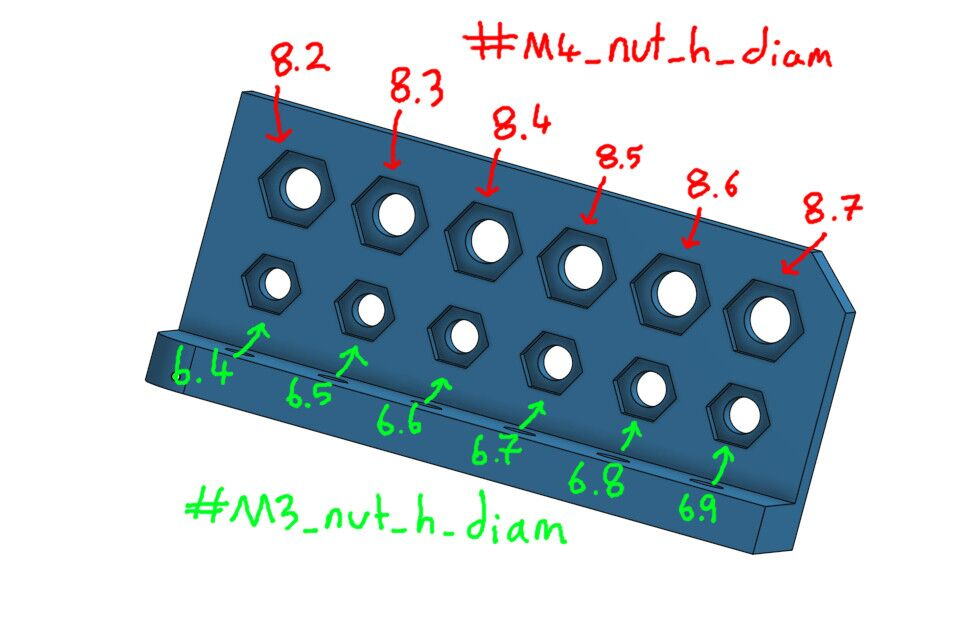
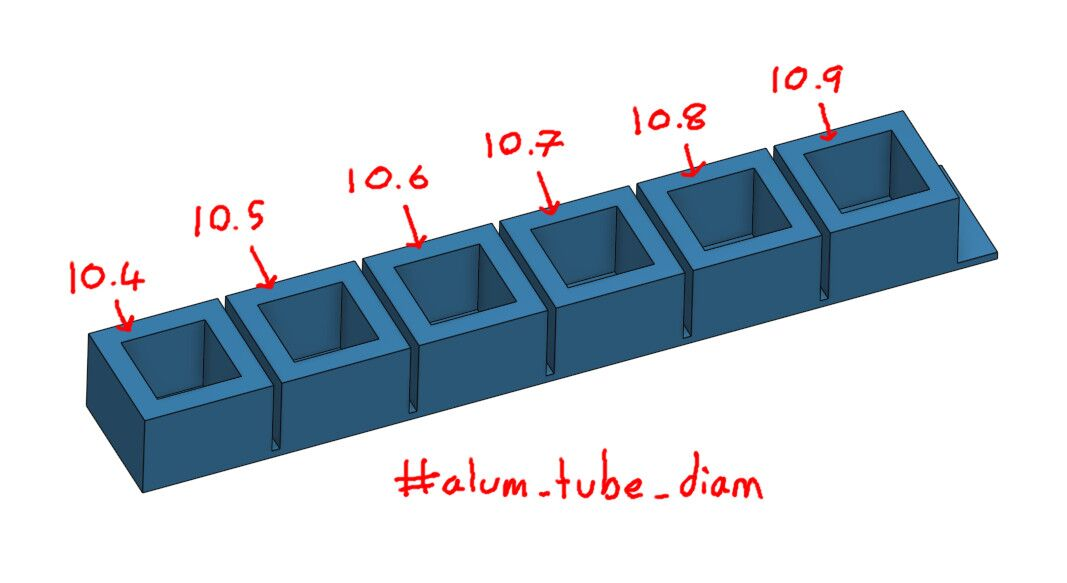
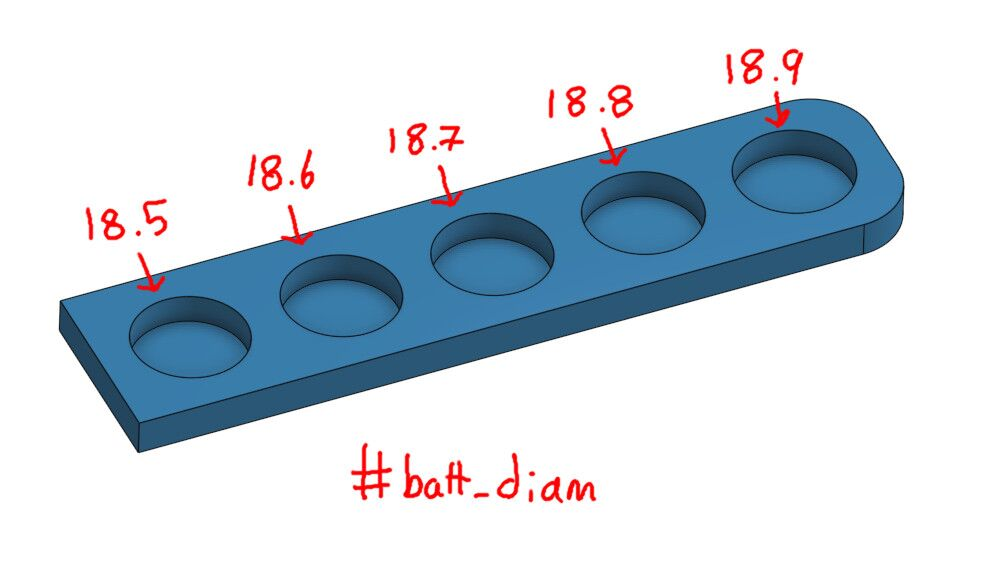
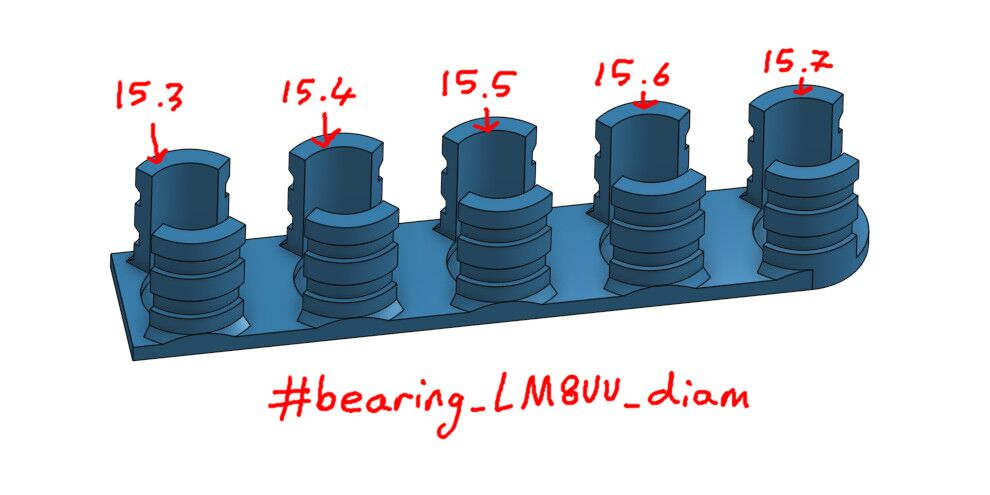
Print all of these parts apart from “18650_fillet”. Test the dimensions of the various test pieces by seeing which feature sizes the components fit into. The names are self explanatory (Part “Alum_tubing” is used to test the size of the hole for the 10mm aluminium tubing). The Onshape document has a different tab for “Printed_parts”. On the left is a set of features, at the top is a set of variables that you’re to change according to these test pieces. The following images should be used as a reference for the values you should use dependent upon the best fitting hole/feature size from your prints.
You’ll notice that you’re missing the value for the variable “#batt_fillet_rad”, that’s because you need to go back to the “Printer_test_pieces” page and enter the correct “#batt_diam” value. Then export the “18650_fillet” part as an STL file and print this part.
Test this part by clipping the 18650 batteries into and out of this part. Make sure that the clip that you select is loose enough so you can plug the battery in, but the battery is not loose within the clip. You can now enter the correct value into the “Printed_parts” variable section, using the below image as a reference for the values of the various clips.
Export all of the glider’s parts by going to the “Printed_parts” tab by selecting all the parts on the Part selector pane and exporting as STLs. Again, make sure that they’re exported as individual files. Now print all the parts using the amount indicated/infill settings shown on the parts list.
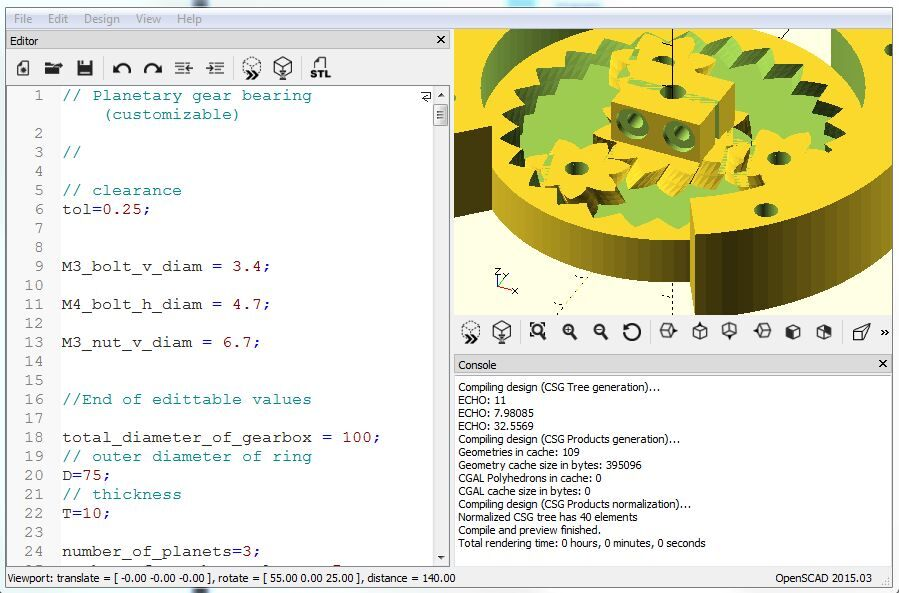
Additionally, you need to print the planetary gearbox system. Download the OpenScad file from the “Files” section of the glider’s hackaday page and open using Openscad. At the start of the document are a couple of values, enter the correct values from the test prints. You have to do a complete render (F6) and export as an STL and print the file. Vary the “tol” value at the start of the slic3r file so that the gears print close enough to reduce slop, but far enough apart so that you can move the gears without issue. Once the gearbox is printed, apply a small amount of silicone grease to lubricate the gearbox.
-
9Wing preperation
Cut the 2mm stainless steel sheet into 2 sheets of sizes 400x140mm. At one ends of the wings, drill 2 3mm holes 15mm from the end, with a separation distance of 70mm.
-
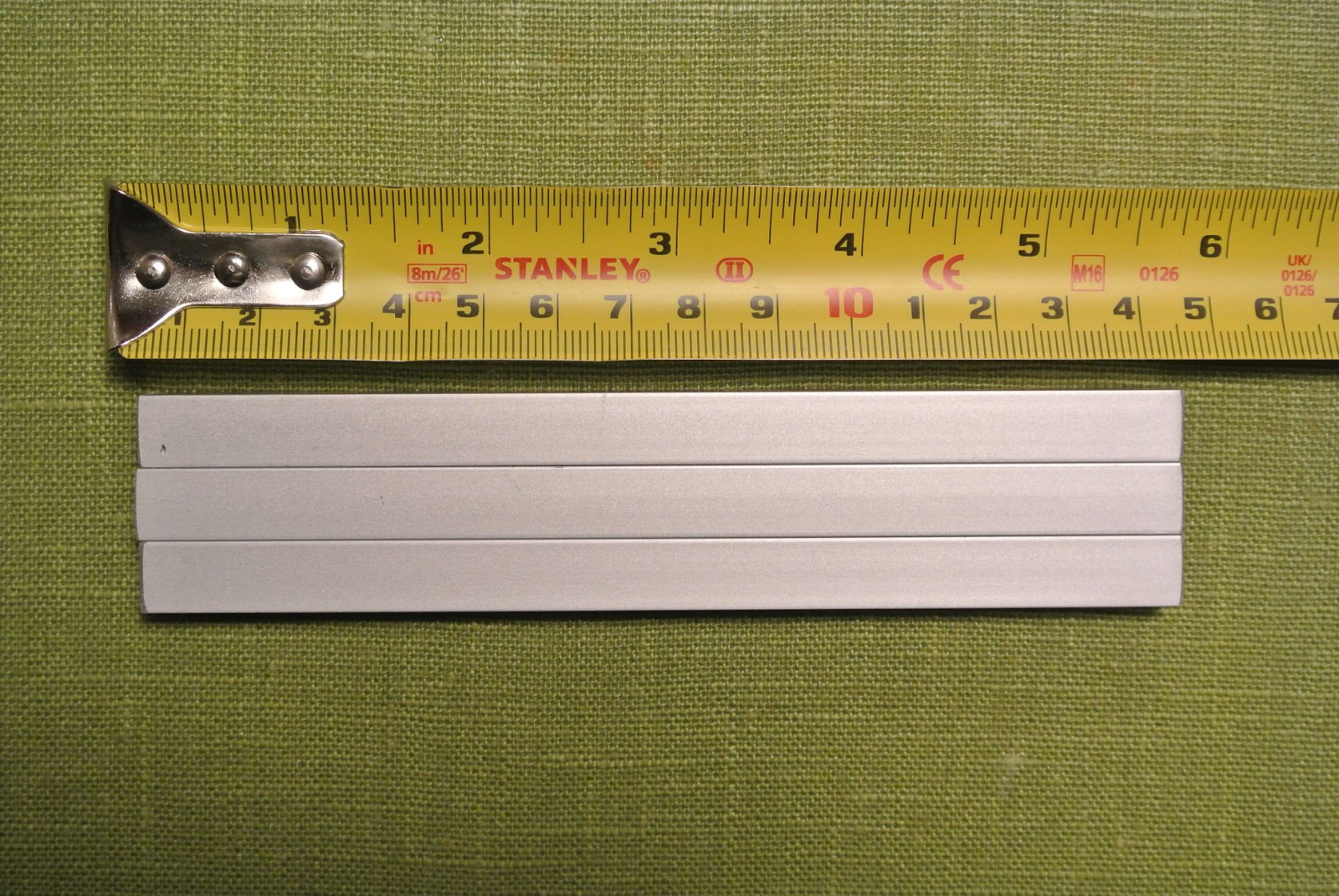
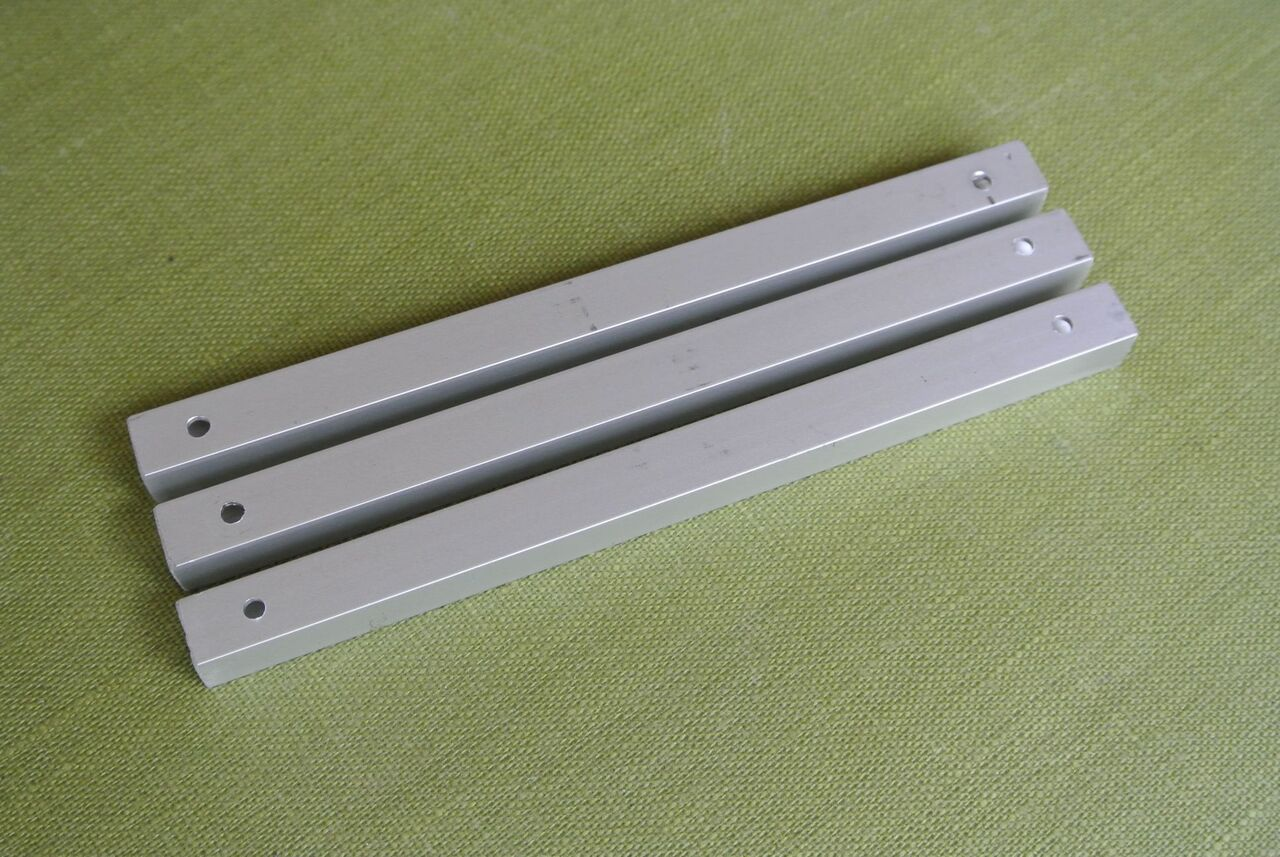
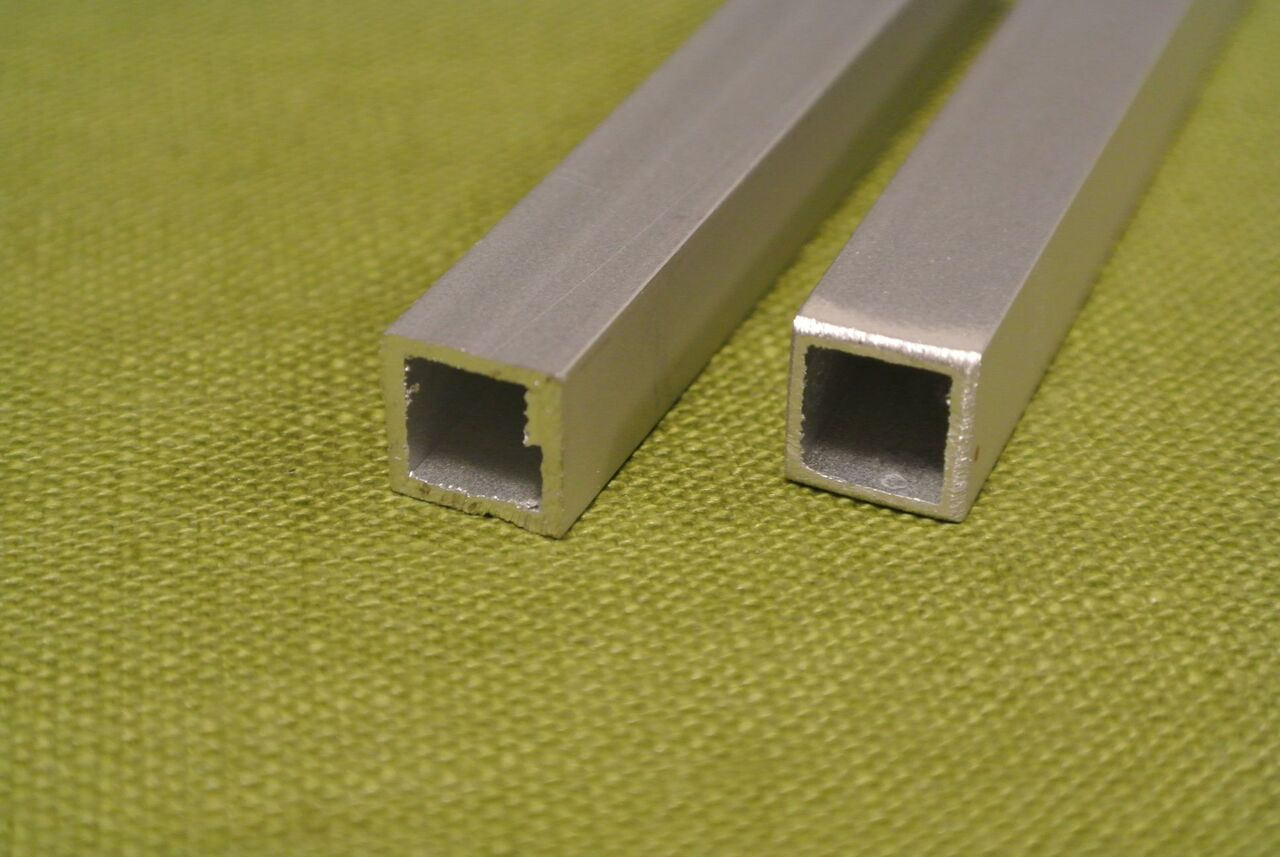
10Aluminium tubing preparation
Cut 3 lengths of aluminium tubing to a length of 145mm and cut 7 lengths of tubing to a length of 70mm. On each piece of tubing drill 3mm holes 10mm from each end. If the cut edges are rough, sand them down slightly (second image). I have only shown images of the 145mm bars, but the 7 70mm bars should be finished similarly.
OSUG: Open-Source Underwater Glider
A versatile autonomous environmental drone using a buoyancy engine





















Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
ummm... why on gods greeen earth would you take 5 pressure fittings designed, to be threaded into things and hold pressure, and glue them into the aluminum plate??? seriously great job on the project but i can see many small things like this that show you have not any experience in actual industry.
the barbed 3/4 bspt hose nipples are designed to hold over 100 bar at the thread. you have actually chosen high pressure fittings and could have used much less heavy duty ones for your application. and the thread on the end of them is designed to be threaded into things. just a tip.
Are you sure? yes | no
I was a high school kid at the time lol. Very much agree, the general principles of the glider are okay, but the whole thing could be redesigned from the ground up and pretty much everything could be improved. (CAN control topology for the controls side, properly rated hydraulic pump, etc. etc.)
Are you sure? yes | no
Only the link for the PCB assembly. The Instructions for the body assembly seem disappear.
Are you sure? yes | no
Yeah, the body assembly that was up was for the first generation. I'm currently overhauling all of the instructions to update them to the third generation hardware. The Hackaday instructions editor is rather buggy (making editing slow) and I'm rather time busy at the moment, but I hope to have the new instructions up soon.
Are you sure? yes | no