 alexw
alexw-
11Exterior printed parts preparation
As the printed components are not completely watertight they need to be coated in epoxy resin (XTC-3D is one brand, but I used Amazing Clear Cast resin as it is food grade and the glider could be going in pools, so I would prefer for nothing to leach). Apply a couple of coats to the “Nosecone”, “Tail_endcap_shroud”, “Wing_mount”s and “Exterior_bar_mount”s. If using mild steel rods for exterior ballast (instead of stainless steel rods) apply a couple of coats to prevent rust buildup.
Drips of resin will harden in some places, or the surface (I used tin foil) may stick to the resin. Sand these sections down until the part is usable.
-
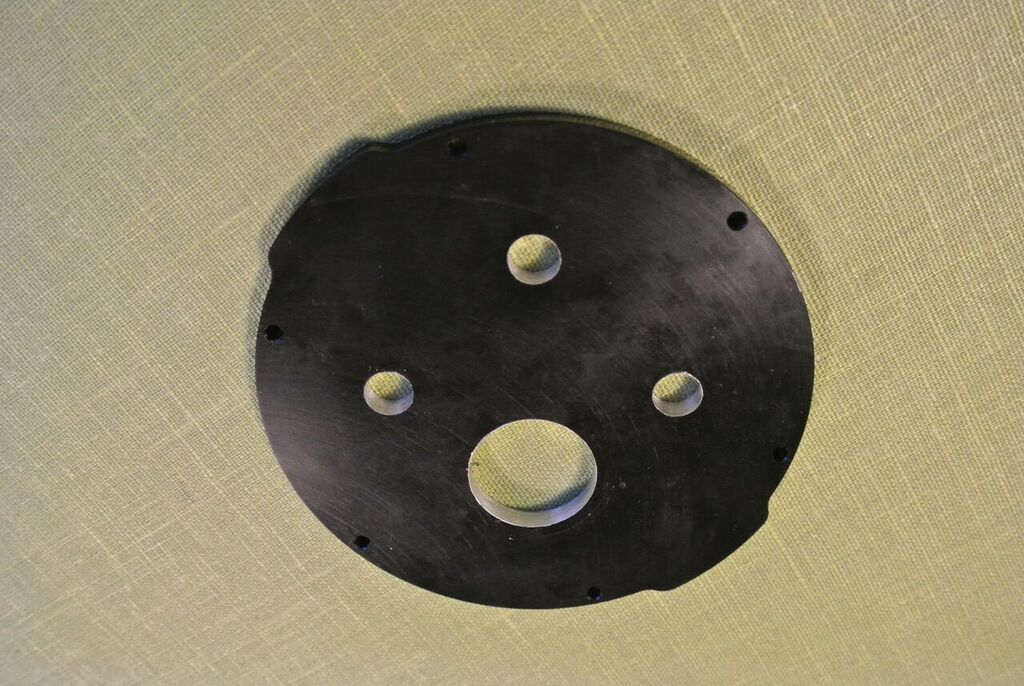
12Endplate preparation
On the “Files” section of the glider’s Hackaday project page there will be a file called “End_caps.pdf”, this is a drilling guide used in this step of assembly. Print this out at 100% scaling. Cut out the top guide piece, carefully cut it out and attach it to one of the Blue Robotics endplates. Look through the 6 mounting holes to make sure that the guide lines up with the endcap and tabs.
Use a centre punch to mark the centre of each of the holes. Drill out guide holes for each hole. It is recommended to use a lubricant such as WD40 to make sure that the aluminium is cut cleanly. Remove the guide plate.
Use a 27mm hole saw to cut the hole indicated by the guide piece. Make sure to go slow in order to make a smooth cut. Again, use lots of WD40.
On the other holes work up to a 10mm drill bit (again, lots of WD40). Clean the endcap with rubbing alcohol to remove all grease/WD40.
As the Bulgin connector has a small alignment tab, you will need to use a dremel or similar to produce a small cutout. Practice this on a scrap piece of aluminum (blue robotics use grade 6061/6063) with the 27mm hole cut out. Keep testing the notch to make sure you only cut out the required amount. Place this notch roughly on the left hand side when looking at the plate from the exterior of the glider. Then clean the plate again using rubbing alcohol and fit the cap, with the seal on the exterior and tighten.
A quick before/after of the notch to show the result clearly:
Attach the other endcap guide piece to the other endcap, make sure that the guide piece lines up with the endcap by the mounting holes and tabs. Like the other endcap: centre punch; guide holes; remove guide piece; work up to 10mm drill bits on all holes; clean with rubbing alcohol.
Using sandpaper, roughen the holes on the side that will be on the exterior of the glider. Clean with rubbing alcohol when finished.
Clean the barbs using rubbing alcohol.
Make up a lot of the marine epoxy and apply it to the base of the barbs.
Make sure that on both sides of the endcap, the barb is connected securely by the marine epoxy and there are no gaps. Try to not get the epoxy above the first barb, as this will interfere with the PVC tubing (If contact is made, remove with cotton bud or similar). The top images shows two barbs, one that has just been put in (top) and another that has been coated on the interior side of the endcap (bottom). The bottom image shows the epoxy applied to the exterior side of the endplate to ensure that there are no gaps. Leave it to set the way up indicated in the second image.
-
13Bar preparation
Cut the mild steel bars to form 13 lengths of 87mm bars and use a dremel or similar to smooth the ends slightly (shown below are 87mm bars, but only 9 of them). Also cut the 1 metre smooth steel bar to get 3 sections of 325mm bar and smooth the ends again. From either smooth stainless steel or mild steel, cut 3 sections of 45mm rods and finish the ends similarly to the other rods.
-
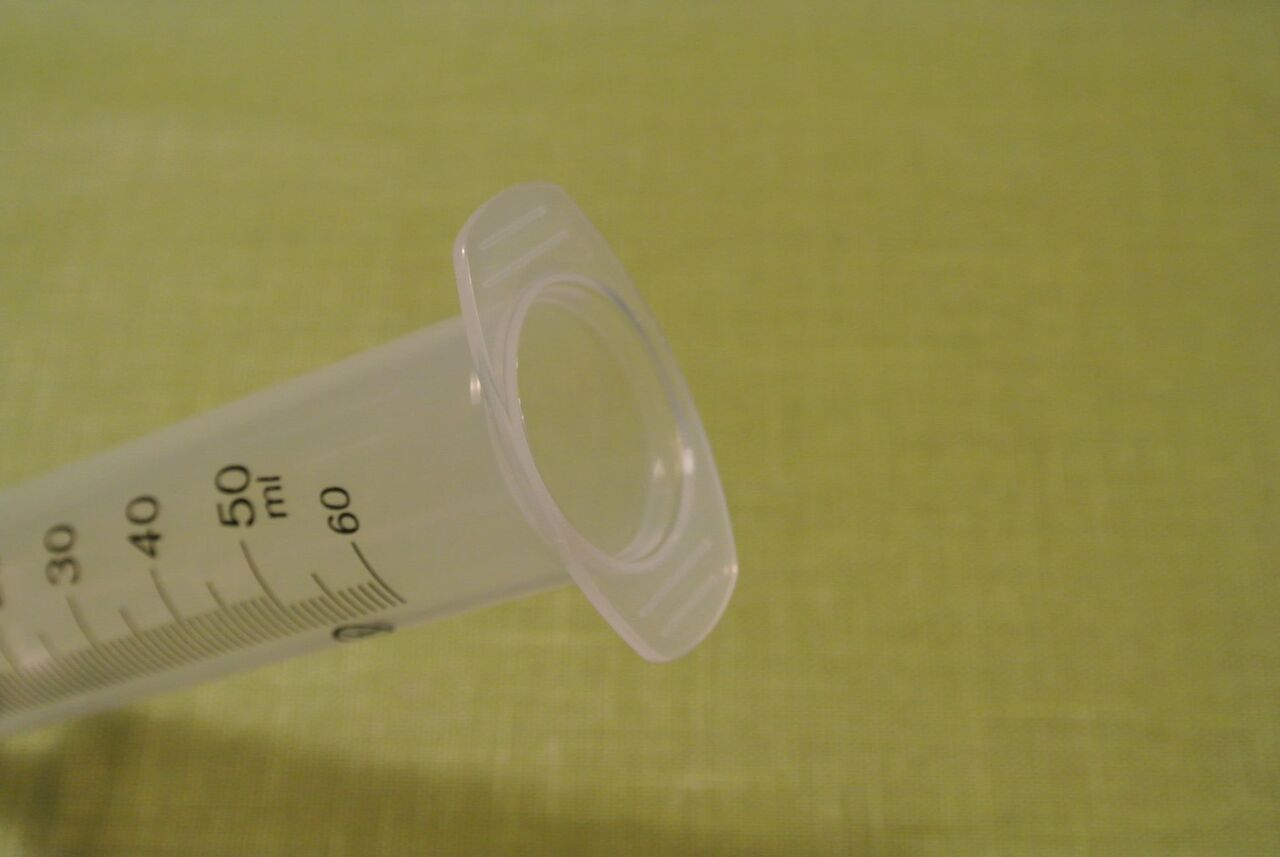
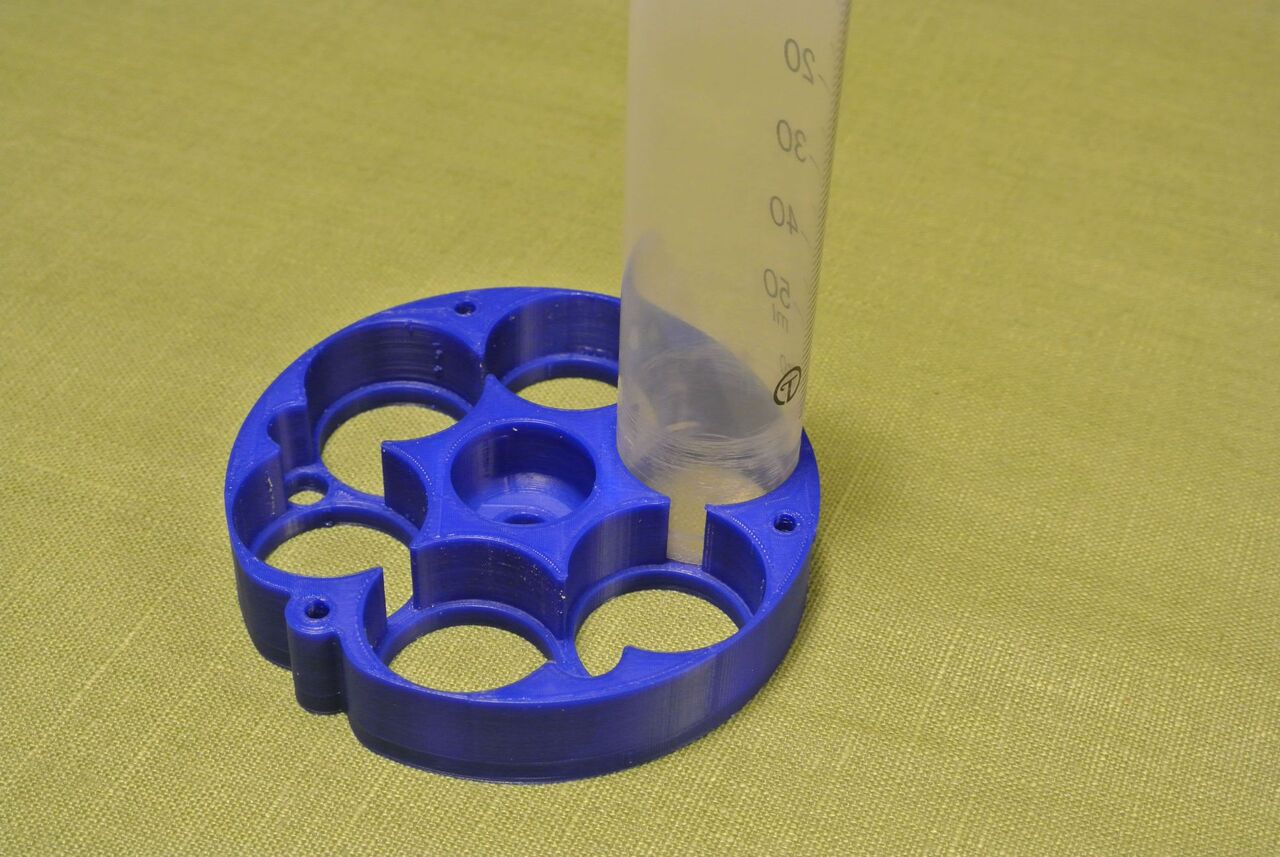
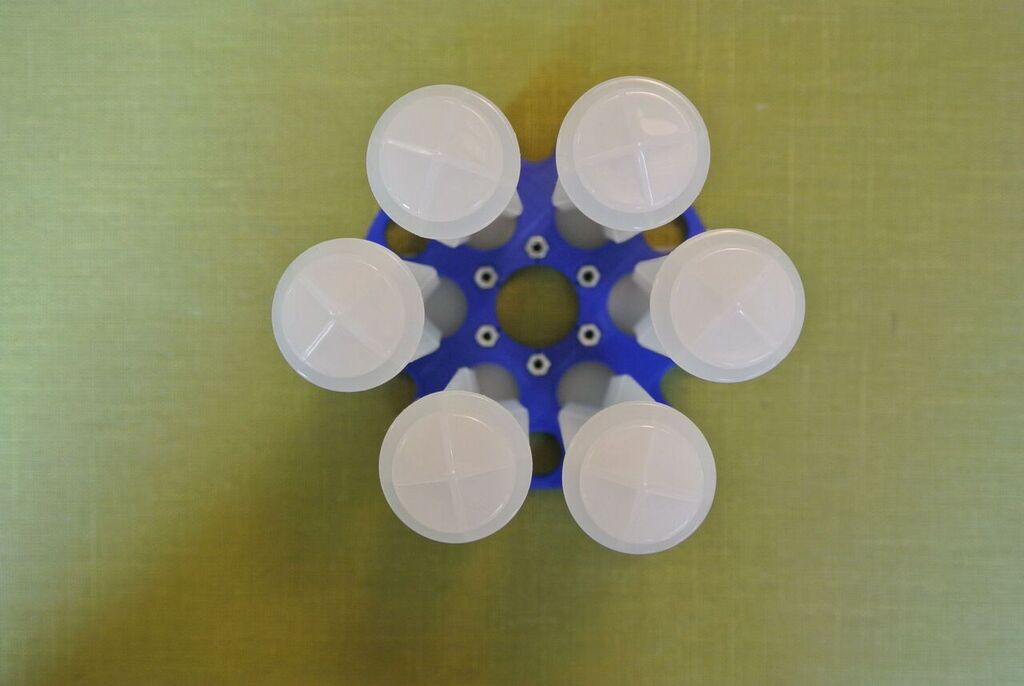
14Syringe preparation
The syringes that are used need to be cut down to the correct size. First trim down the tops of the syringes so that less is required to be sanded. Make sure that you don’t shorten the syringes.
Next sand the top of the syringe down so that where this lip was becomes flush with the rest of the surface of the syringe. Test this by putting the syringe in “Syringe_clamp_back”, it should not require much force to get it in. If you’re happy with the fit, repeat this for the other 5 syringes.
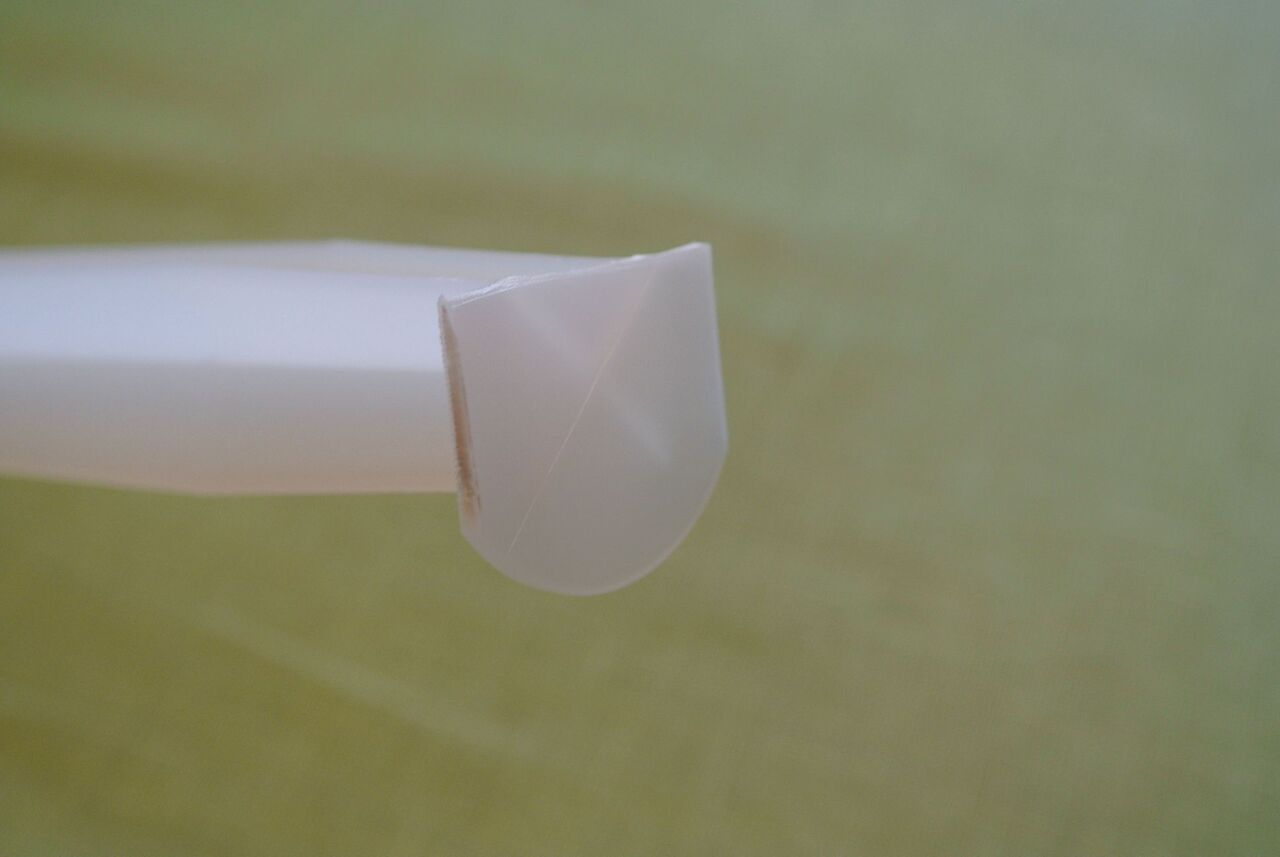
The plungers of the syringes also require preparation. On one side trim the cap all the way to the cross centre. On either side of this cut trim the plastic a small amount, do not go all the way to the central cross.
-
15Fathom-S topside assembly
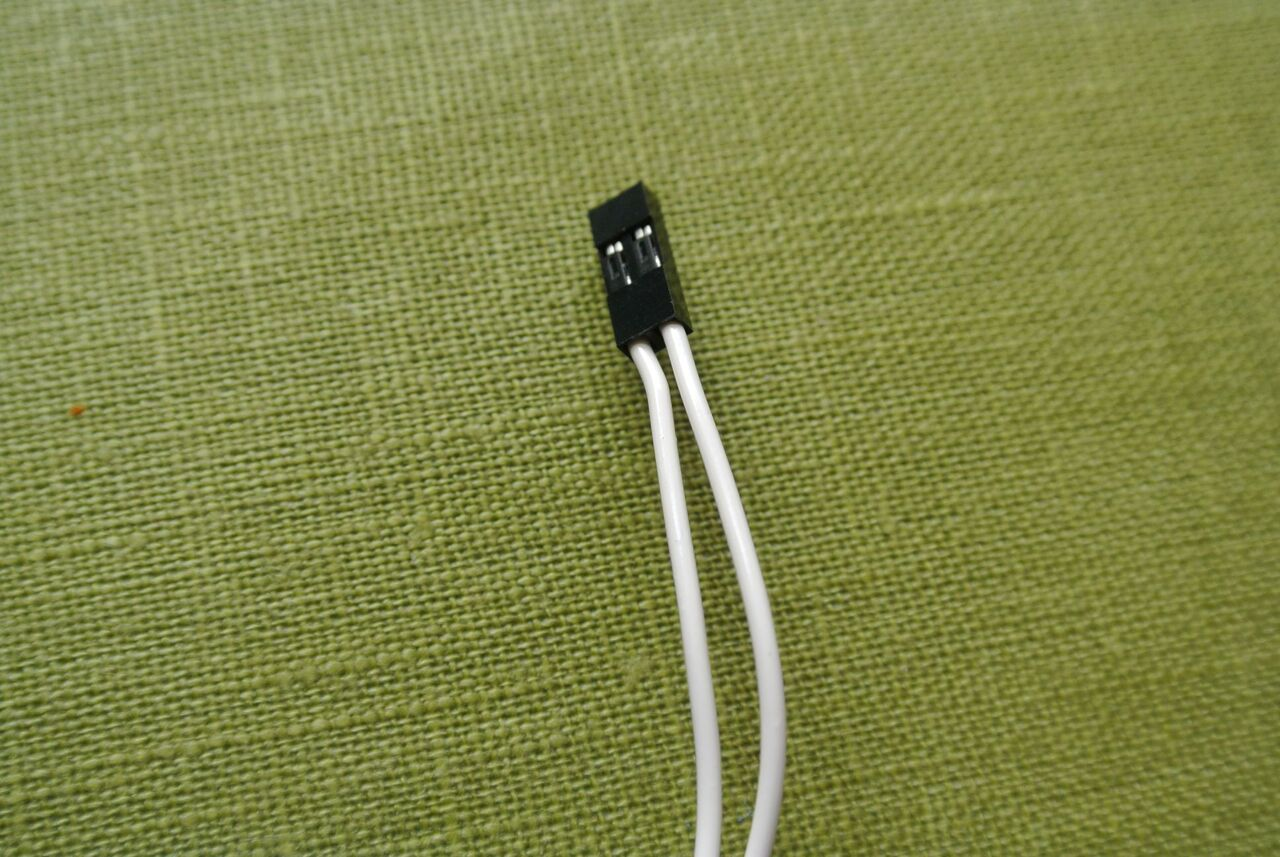
Cut a ~10cm length of the tether cable and strip it down to the pairings. Strip the ends and tin one end of each wire as shown below.
Solder the other end into a breadboard and also solder an 8 pin male KK series connector. Make sure that the wires and connector are electrically connected.
Cover the wired connections in hot glue to secure them and screw the wires into the screw terminals of the Fathom-S topside board, the PCB indicates on it the order of wires to be connected.
-
16Charging cable assembly
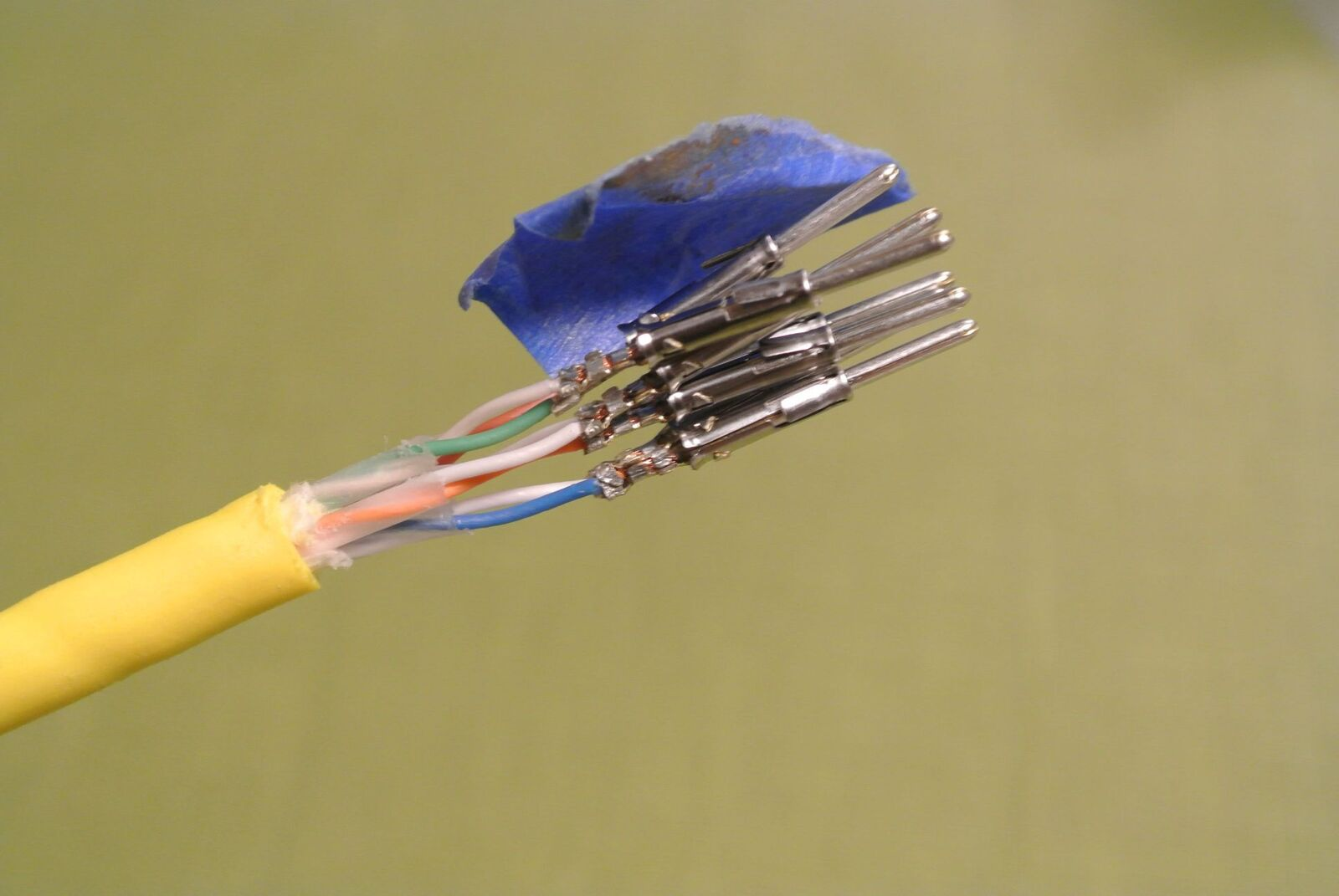
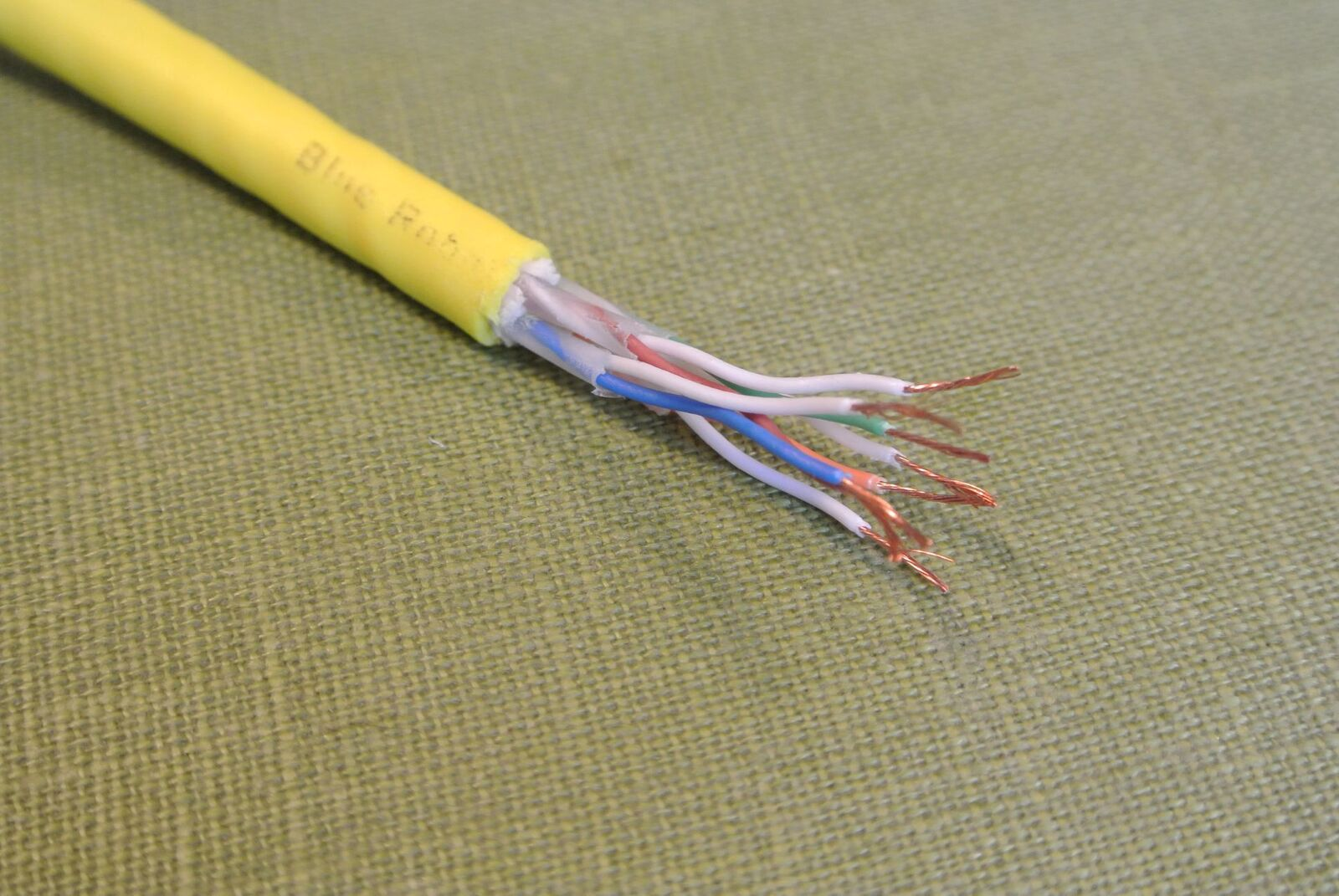
Cut off a ~1m length of the tether cable, strip the cable down to its wires as shown and strip the ends.
Cover the brown connector in tape and crimp the Bulgin male contacts onto the other 7 wires
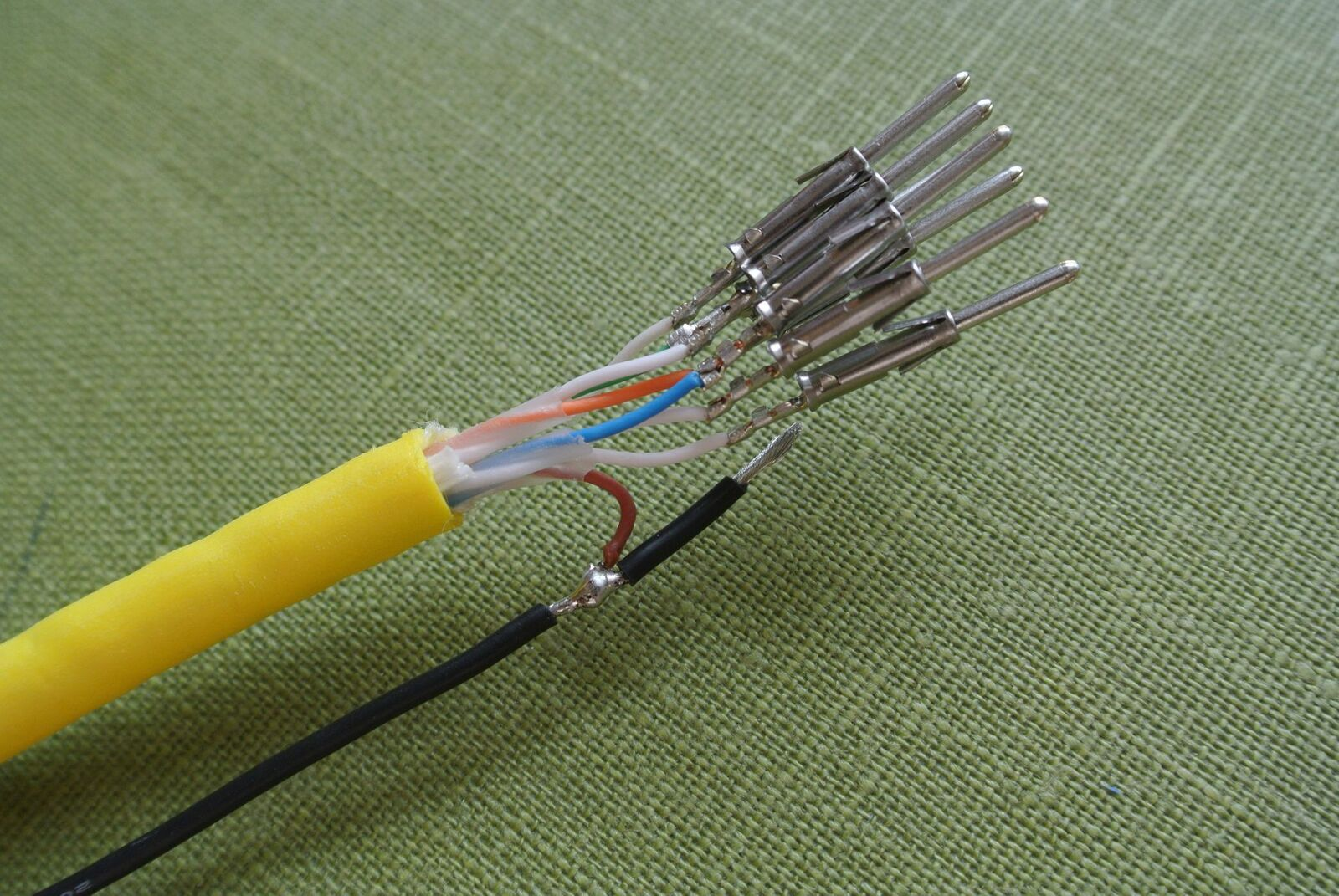
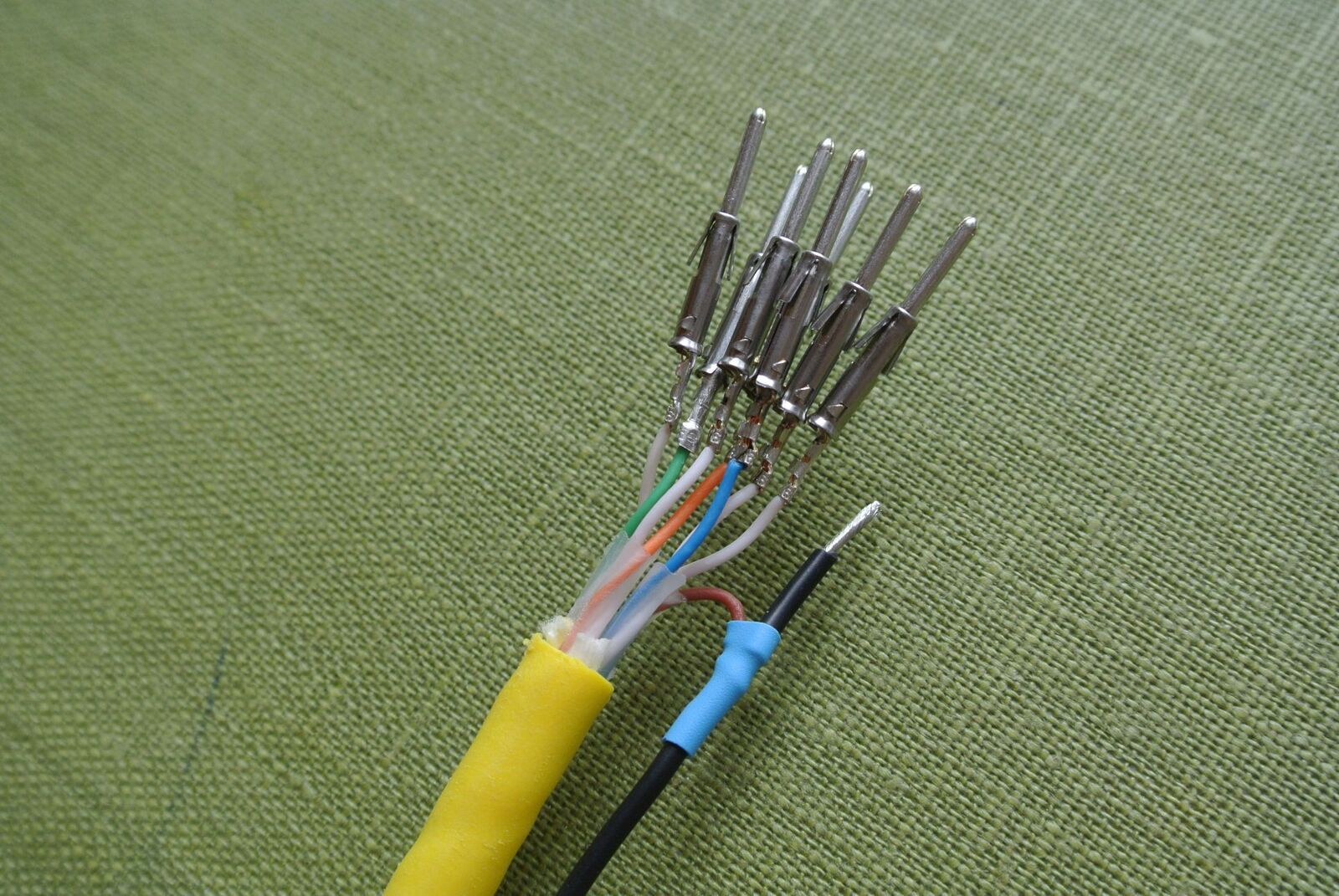
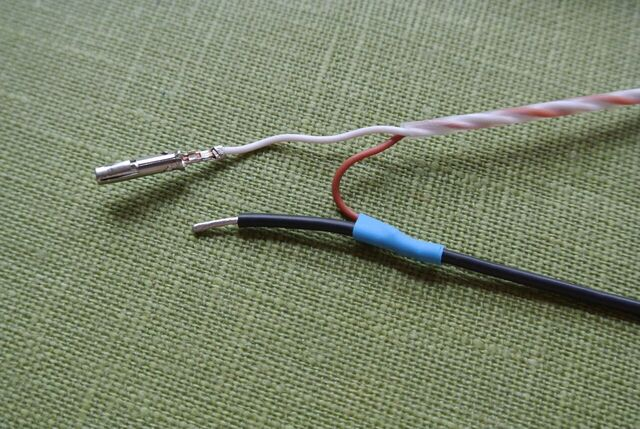
Cut a ~1.5m length of the black power wire and strip on of the ends as shown in the first image below. Wrap the brown wire’s core around the second section of the black wire and then solder/heatshrink.
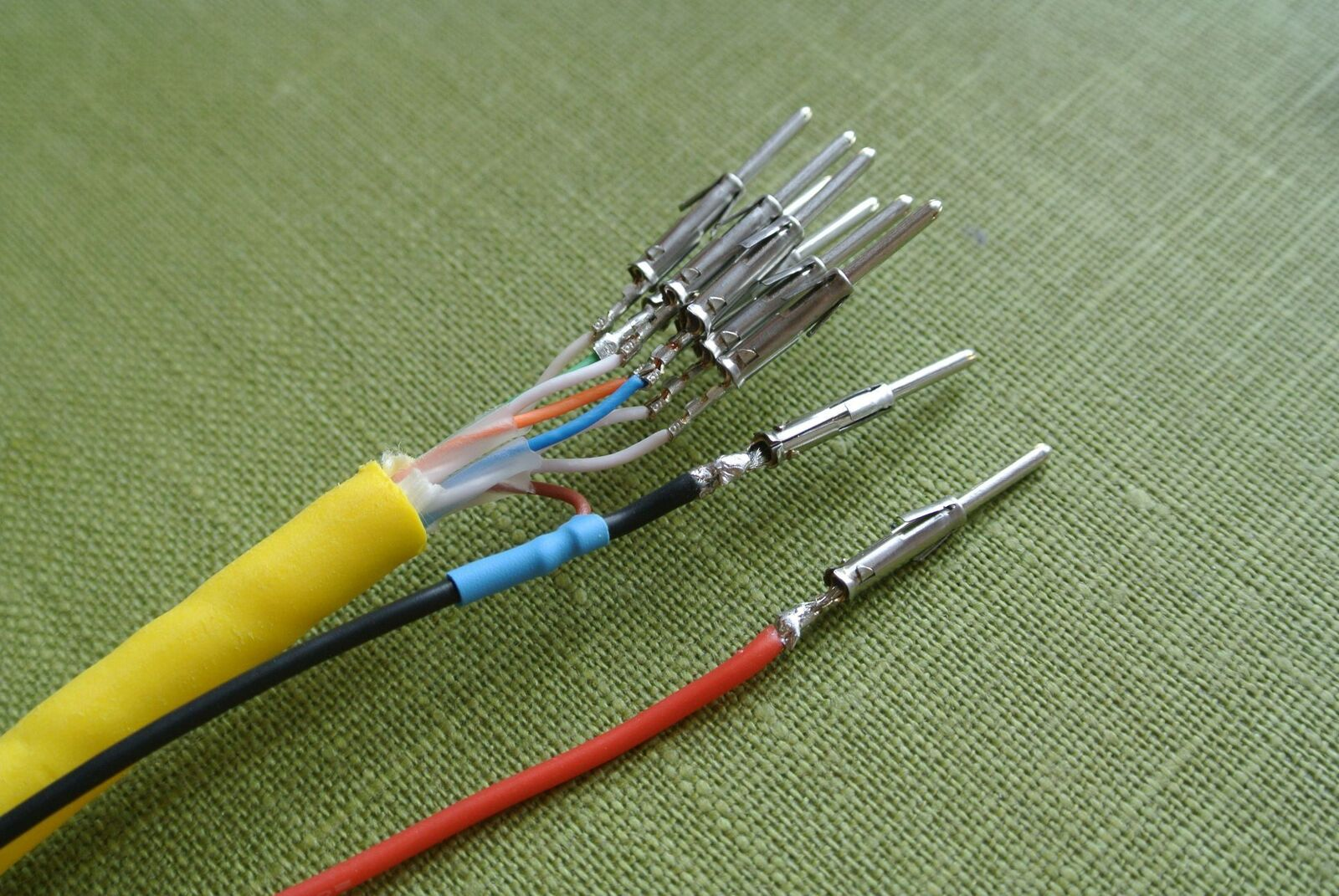
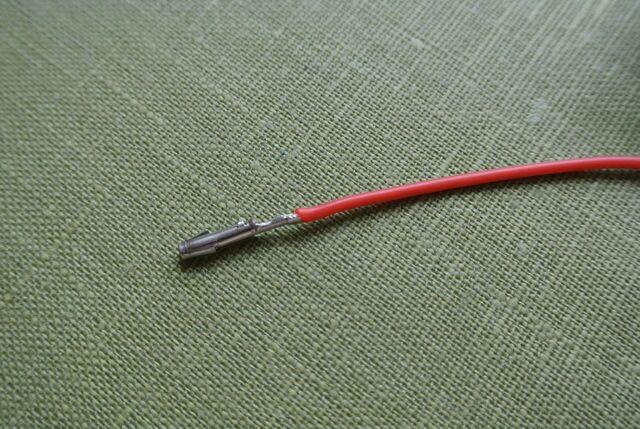
Crimp a male Bulgin contact onto the black power cable end. Also cut a ~1.5m length of red power cable, strip the end and crimp a male bulgin contact onto the end.
Put the contacts into the bulgin male housing with the following hookup:
Orange white - 1
Orange - 2
Green white -3
Green - 4
Black power - 5
Red power - 6
Blue white - 7
Blue - 8
Brown white - 9
Apply a generous amount of hot glue next onto the wires next to the contact housing, to prevent the wires from moving and wearing away. Refit the housing for the Bulgin male connector. The rubber ring can be reversed as shown below.
On the other end of the red/black power wires, strip the ends and solder them to a 9mm barrel connector, making sure to use heatshrink.
On the other end of the tether cable, strip the wires and crimp the KK series female contacts. Plug the contacts into an 8 pin KK series header in the order shown in the third image below.
Use zip ties to connect the two portions of the charging cable together.
-
17Underwater tether assembly
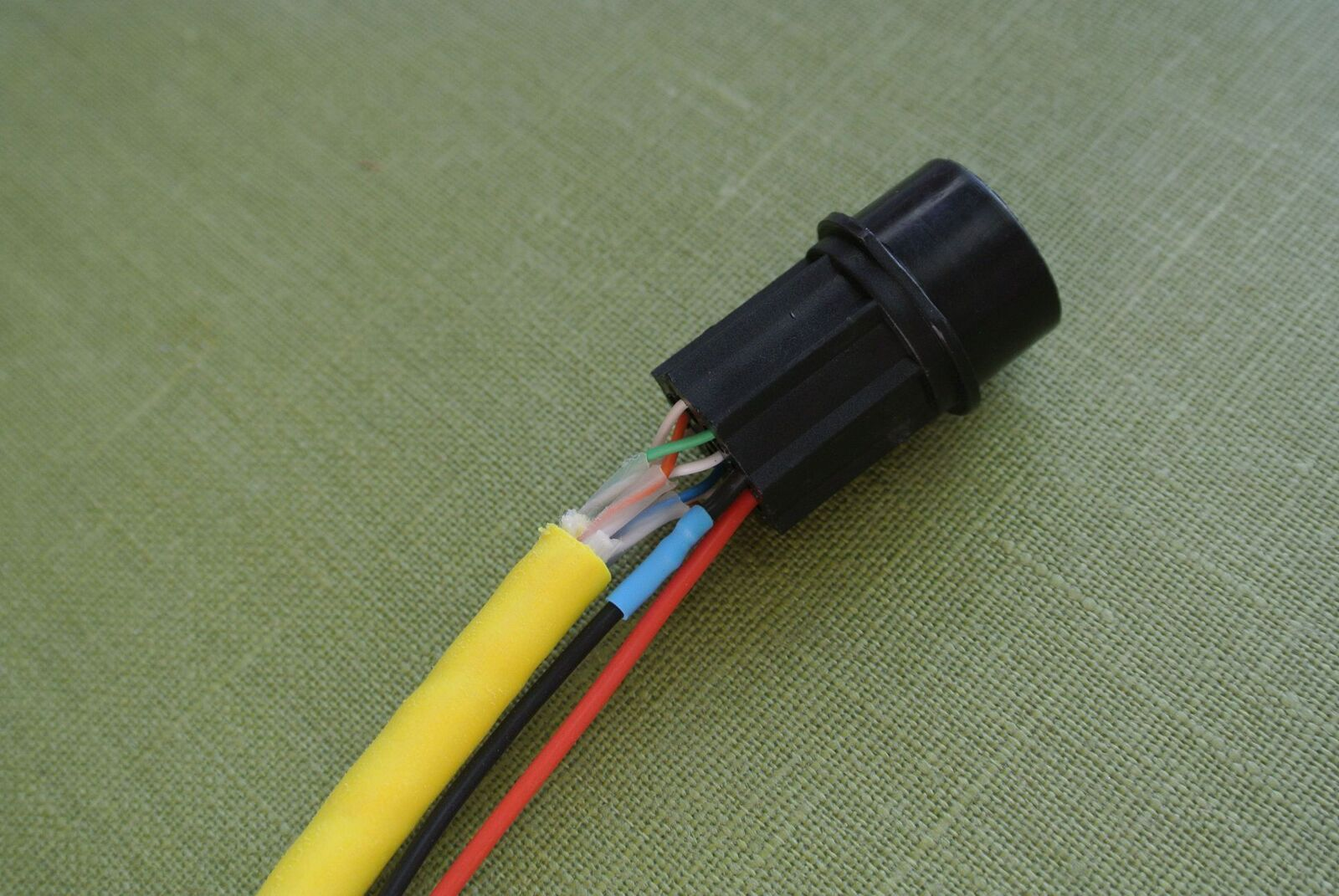
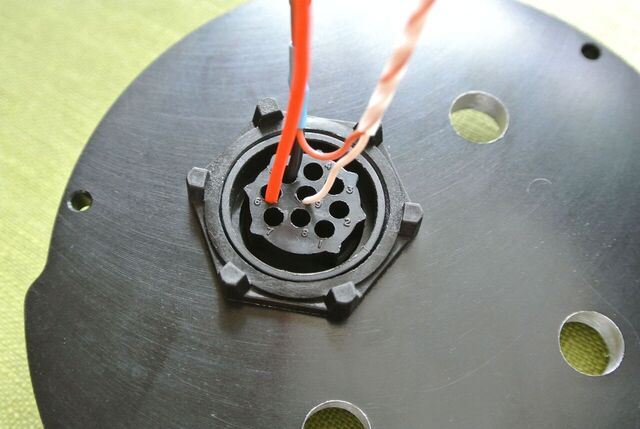
Cut the cable strain relief at the indicated point and put the Bulgin components onto the wire as shown below and then assemble.
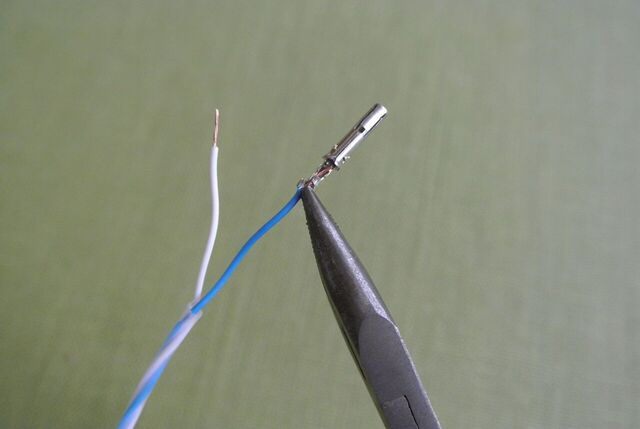
Strip the end of the tether cable to a minimal degree (there is not much space inside the bulgin connector) and then crimp the Bulgin male contacts onto the tether wires.
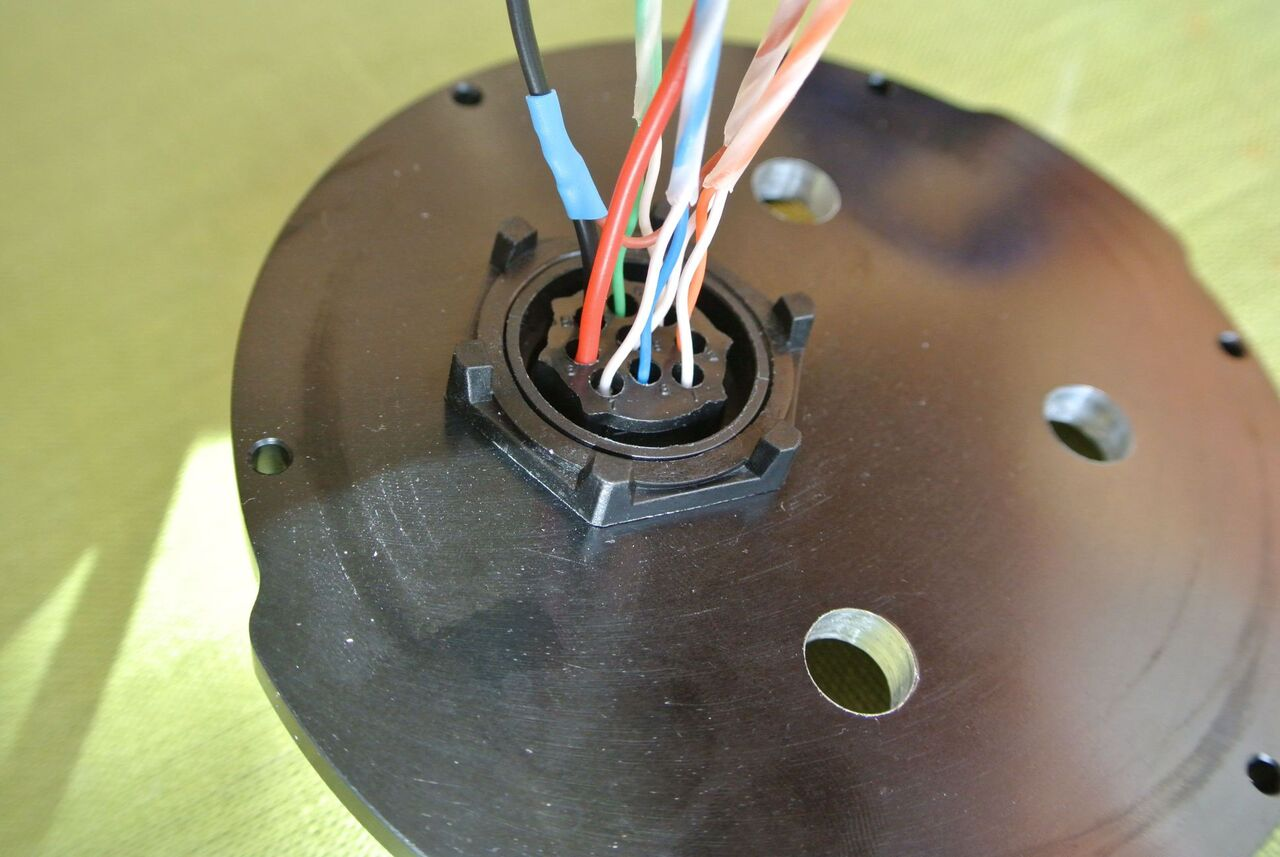
Align the contacts with their respective holes and then push them all in together:
Orange white - 1
Orange - 2
Green white -3
Green - 4
Brown - 5
Blue white - 7
Blue - 8
Brown white - 9
Bring the back end of the connector up to the front and fasten together.
On the other end of the tether cable, strip the wires and crimp the KK series female contacts. Plug the contacts into an 8 pin KK series header in the order shown in the third image below.
-
18Front end assembly
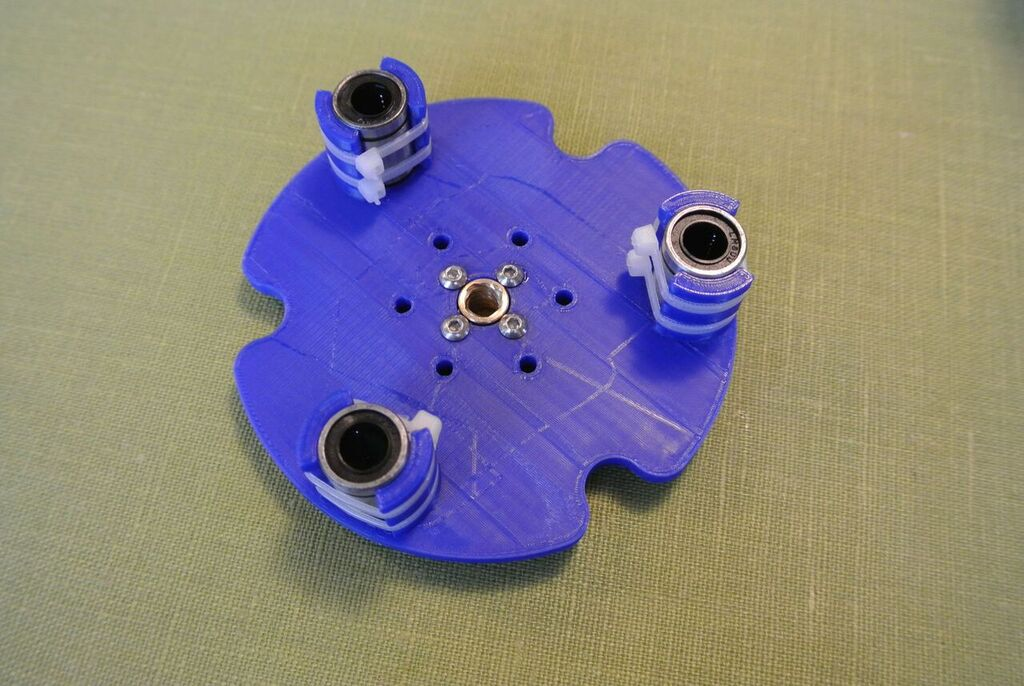
Place a single 608ZZ bearing in each of “Syringe_clamp_front” and “Syringe_clamp_back”
On the “Syringe_clamp_back” secure the bearing in place with the “Engine_bearing_fastener” piece, 3 M3 20mm bolts and 3 M3 nuts. On the backside of the “Syringe_clamp_front”, place the “Engine_end_connector”, making sure that the ridges at the top of the parts line up. On the “Syringe_clamp_front” secure the bearing in place with the “Engine_bearing_fastener” using 3 M3 25mm bolts and 3 M3 nuts.
Place 6 M3 nuts within the “Engine_end_connector”, a small bit of sanding may be required for the nuts to get fully into position.
Apply silicone grease to the larger of the endcap o-rings and place these on one of the endcaps.
Using 4 M3 10mm bolts attach the part “Engine_endcap_mount” to this endcap. Make sure that the orientation of the two pieces is the same as in the second image.
Put the endcap piece and the syringe front plate together as shown below. Make sure that the tops line up (On each piece there will be 1 side which is different, make sure that these sides line up). Secure this joint using 10 M3 10mm bolts which connect to the 6 M3 nuts placed earlier.
Grease the smaller o-ring and put it on the endplate as shown below.
Attach the nosecone and endcap using 6 M3 16mm bolts (make sure that these bolts are stainless steel as they will be constantly exposed to water). (This image shows the syringes etc attached, ignore these)
Place one of the syringes within their mount, trim the end off the syringes until they’re of the correct length and fully fit into their mount without colliding with the barb connectors.
Place the PVC tubing on a syringe firmly (You ideally want it on as hard as it’ll go without the syringe breaking) and mark where the tip of the syringe ends. Also mark ~14mm further down. (This value will vary between particular barbs - you want this length to be sufficient for there to be a good seal, but not so long that the syringe cannot be fully inserted). Cut the pipe at the second mark (use a craft knife to make sure that the cut is clean).
Attach the syringe to the barb. Put one of the plungers inside the syringe to do this, otherwise something like the second image will occur. Cut/attach pipe for all the syringes and attach all of the syringes to the barbs.
Fit 3 of the LM8UU into the “Syringe_plunger_back”, secure using zip-ties and trim. Attach the acme thread nut and secure this using 4 M3 16mm bolts and 4 M3 nuts (some acme nuts already have threads and do not require nuts). Refer to the image below for orientation.
Place 6 M3 nuts in “Syringe_plunger_back” into the indentations. Place the 6 syringe plungers in “Syringe_plunger_back”, make sure that the plungers are the correct orientation, refer to the second image for the correct orientation.
Using 6 M3 16mm bolts, attach the two syringe clamps together. Make sure that the large diameter holes (for the 8mm smooth rods) line up. Do not overly tighten the bolts as the plungers may need to move slightly to run smoothly.
Slide the back syringe clamp onto the plungers. Make sure that the ridged section of the syringe clamp lines up with the indented section of the plunger clamp. Also make sure that the syringe clamp is the correct way around to allow for the syringes to be attached. It can help in this step to remove the seals before you slide on the syringe back clamp and re-attach the seals once the syringe clamp has been slid on. Refer to the image below for orientations.
Attach the two ends of the syringes, making sure that the ridges on the two clamps line up. Make sure that both ends of the syringes are fully into the two ends of the syringe clamps.
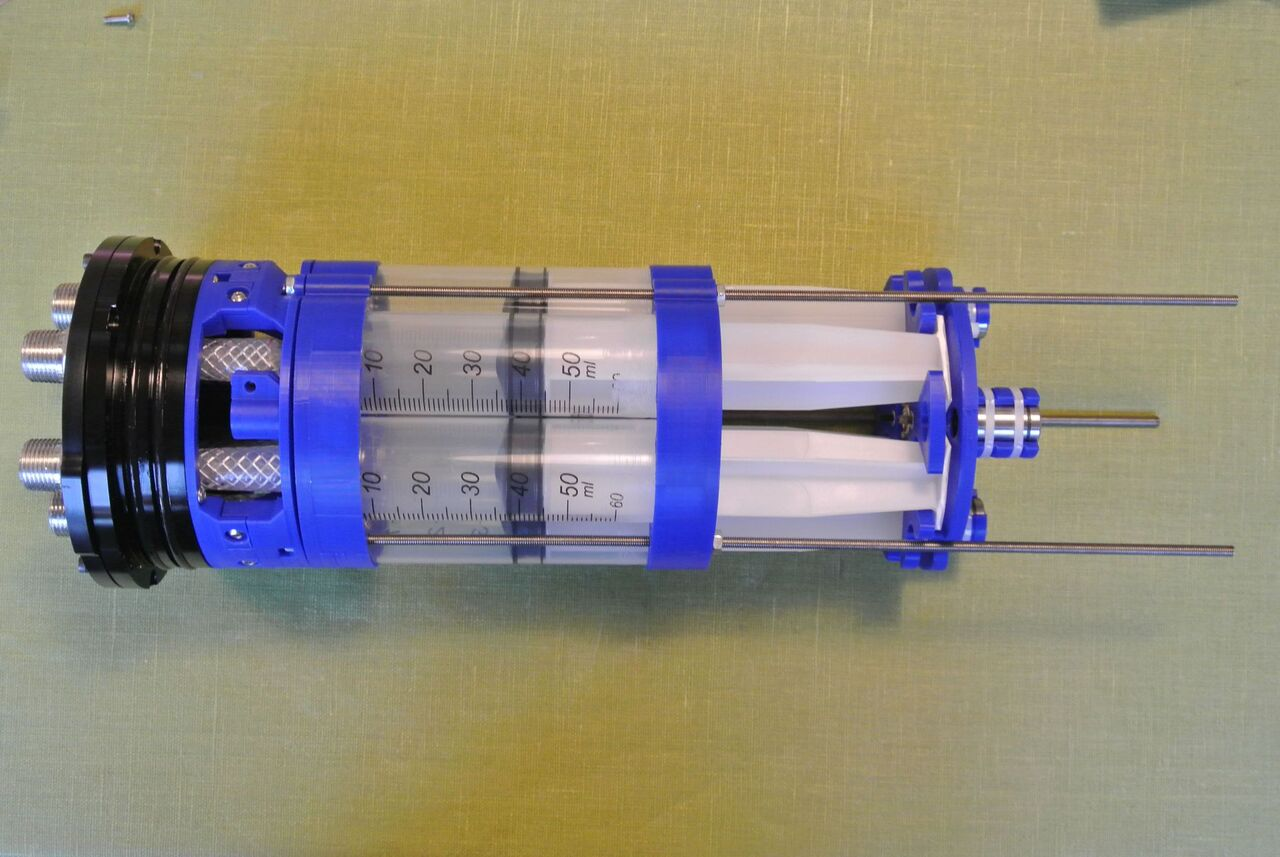
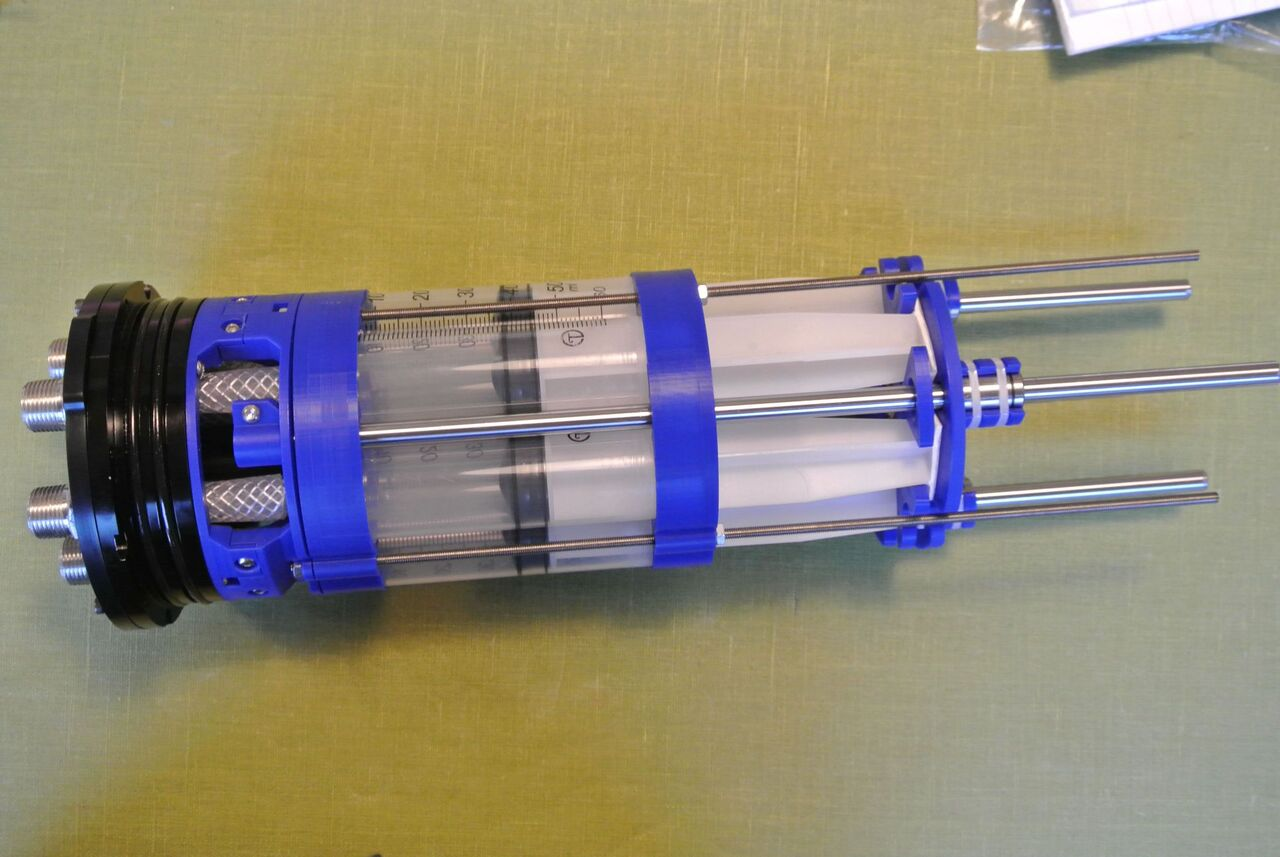
Using the 3 300mm M4 rods and 6 M4 nuts, bolt the two sections together. Use calipers to make sure that the two clamps are not skew.
Slide in the 325mm smooth rods through the LM8UU bearings and into the bar clamps. Using 3 M3 10mm bolts and 3 M3 nuts, tighten the bar clamps.
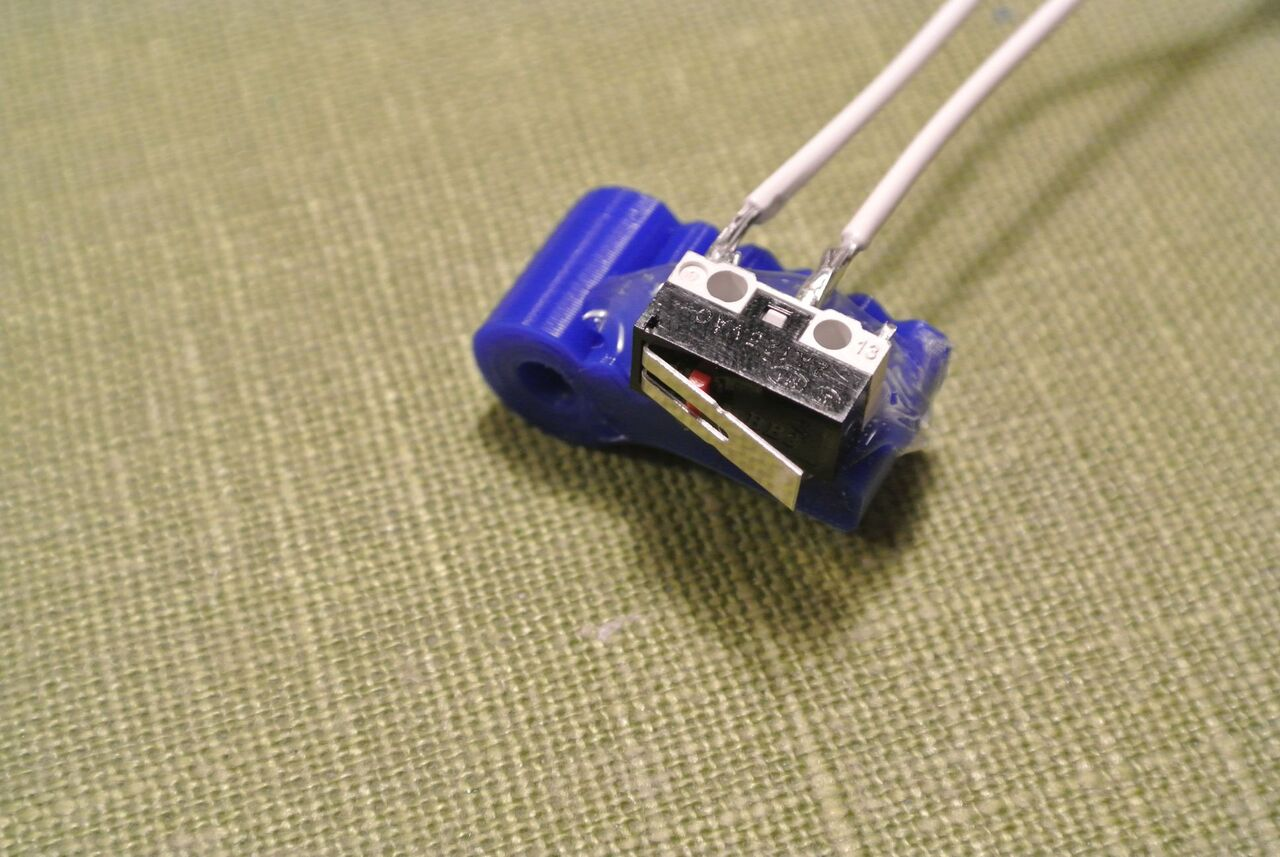
Cut 2 lengths of ~15cm wire and 2 lengths of ~30cm wire. Strip the ends and solder them to 2 micro level switches. Make sure that you solder them to the normally open position.
Strip the ends of the endstop wires and crimp on the female 0.1” contacts. Attach these ends to a 2 contact female 0.1” header as shown.
Use hot glue on the micro lever switch with the longer wiring to attach it to the “Engine_endstop”. Make sure that the hot glue does not interfere with the switch operation.
Move the plungers to their fully out position and attach the endstop using 2 M4 nuts so that the switch closes when the plungers are at the fully out position.
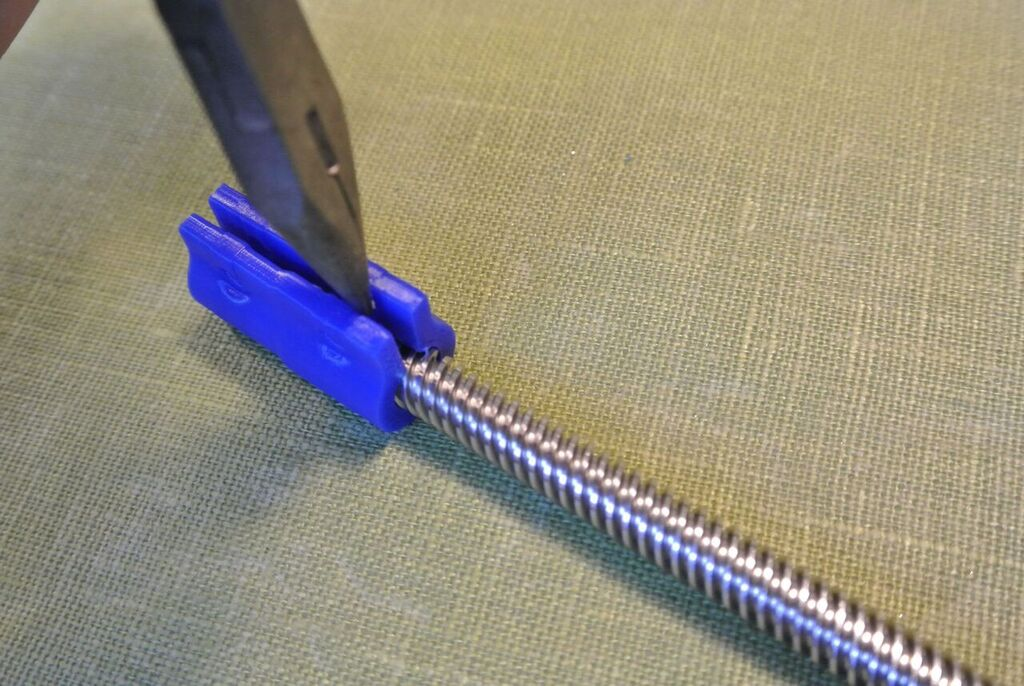
Attach the acme rod to the “Acme_motor_connector”. The fit is designed to be tight, so use some pliers to lever the acme rod into position.
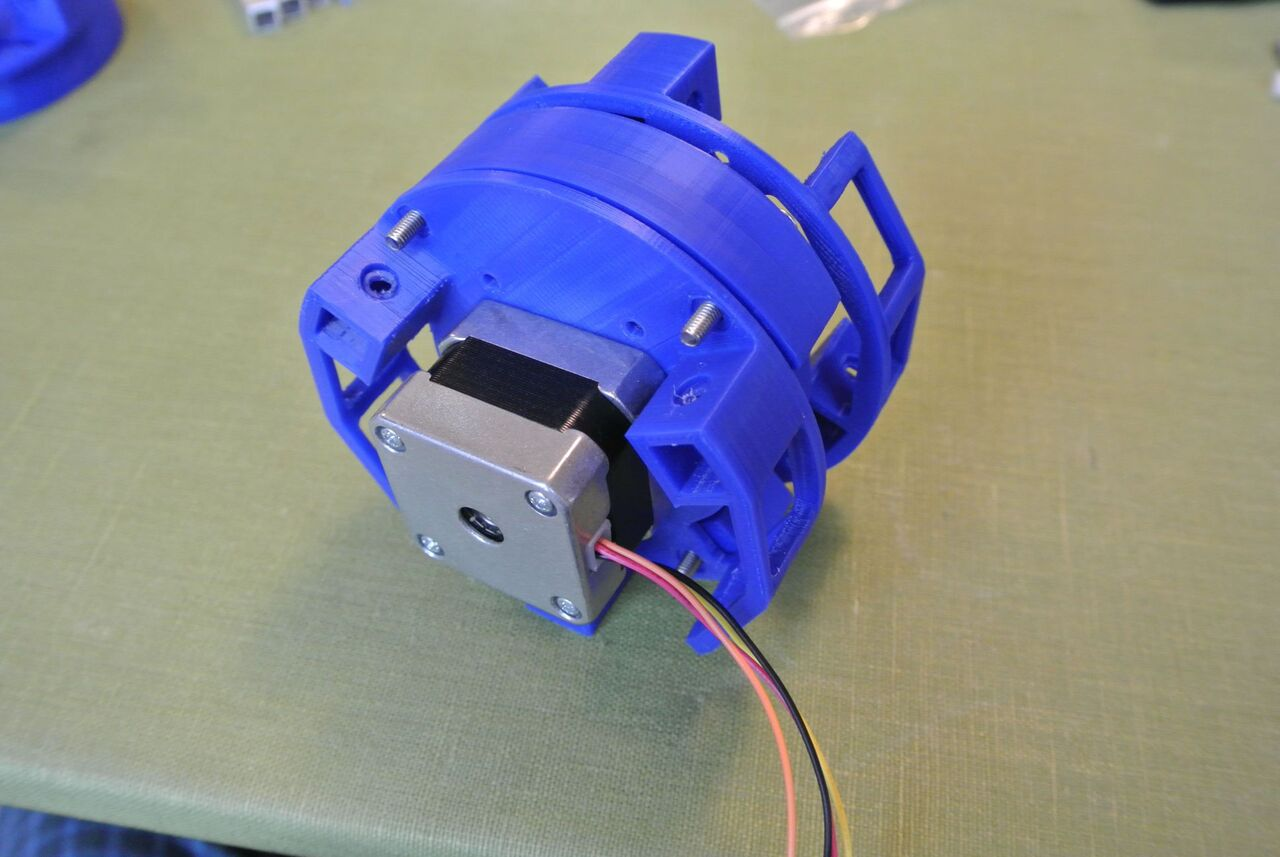
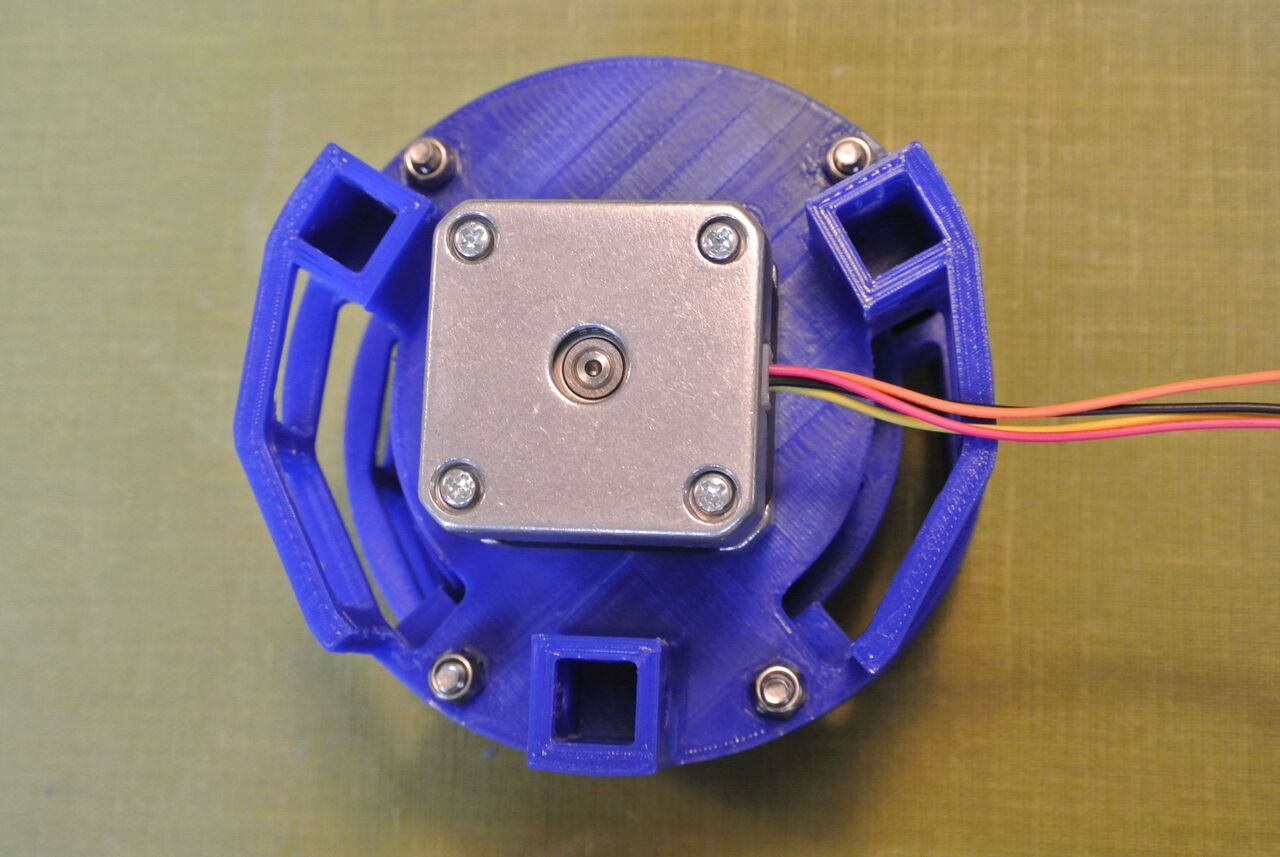
Attach the “Acme_motor_connector” to the 60mm NEMA 17 stepper motor and secure the clamp using 2 M3 16mm bolts and 2 M3 nuts.
Using 4 M3 10mm bolts, connect the stepper motor to the part “Buoyancy_enigne_motor_mount”
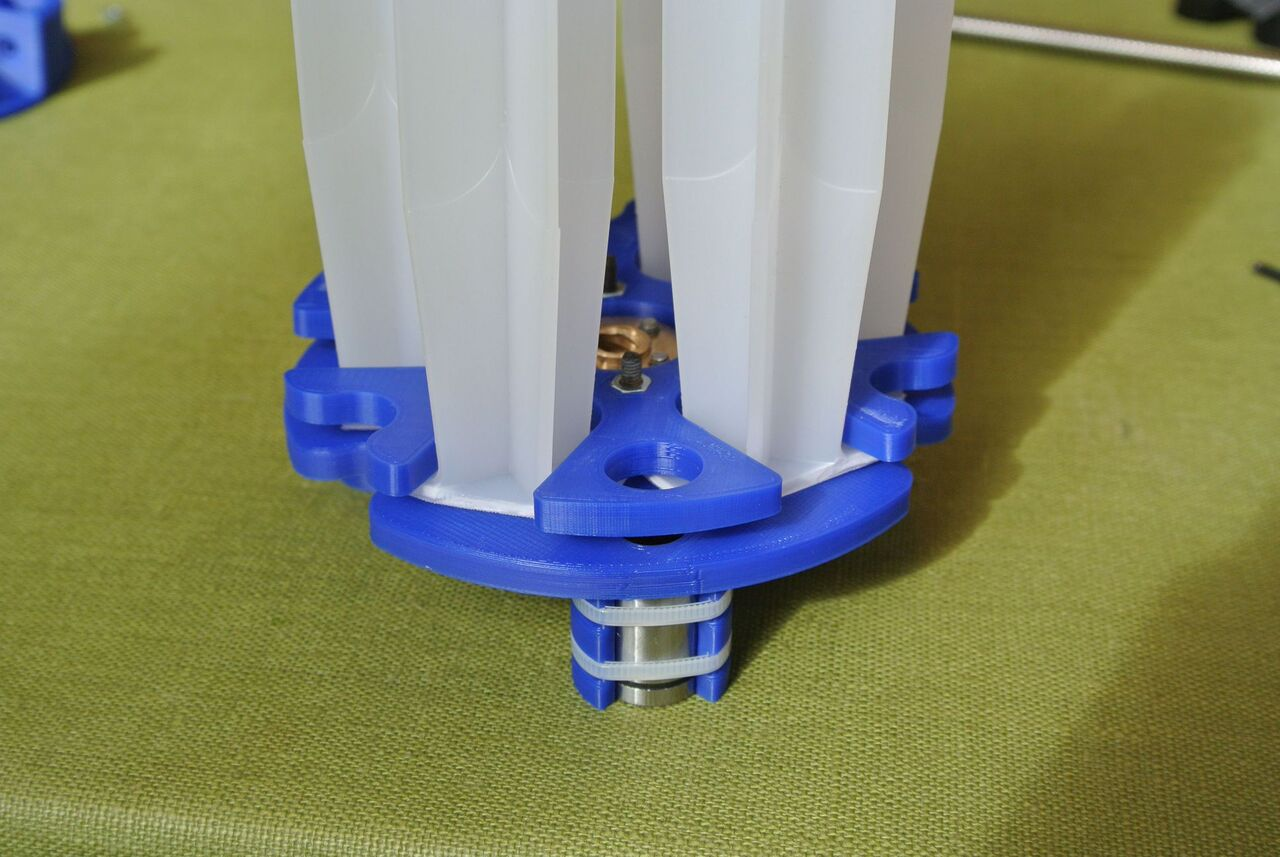
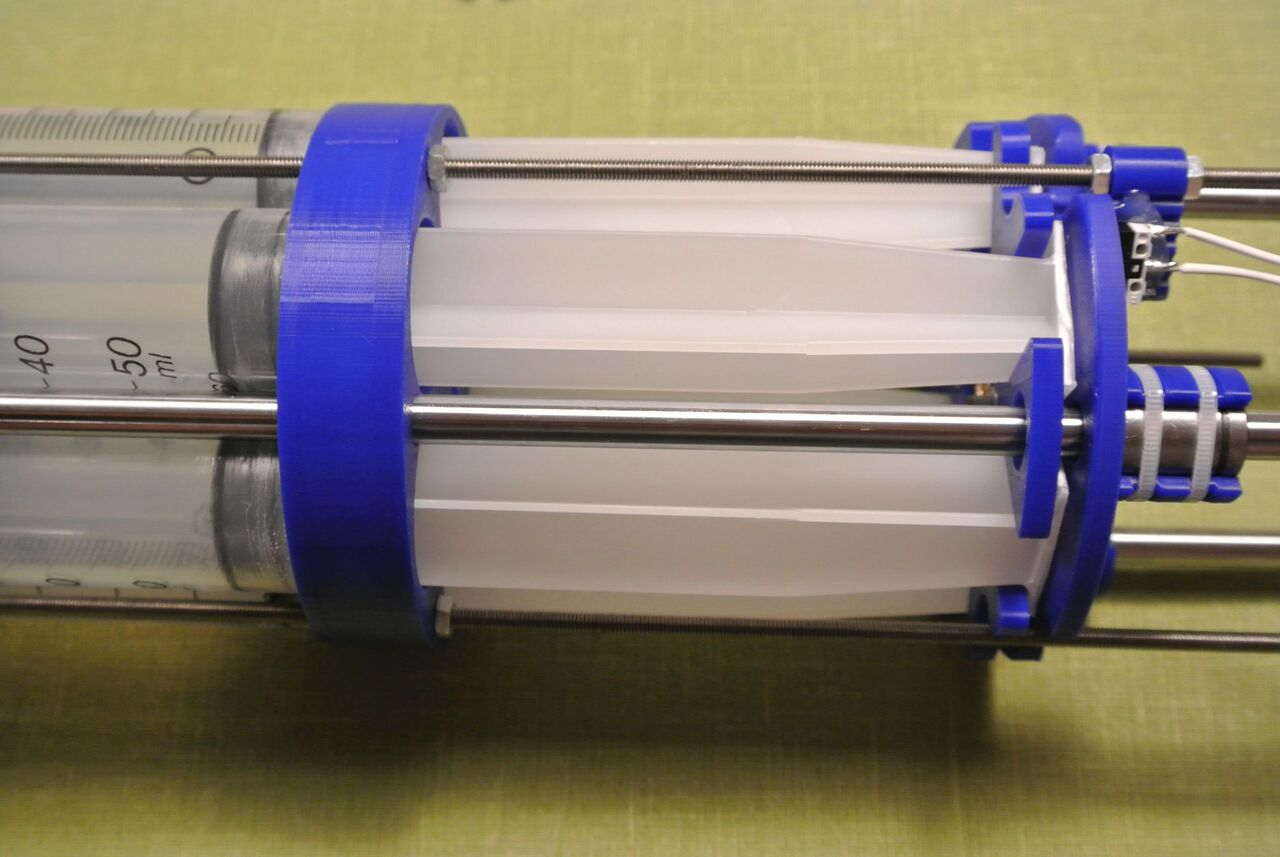
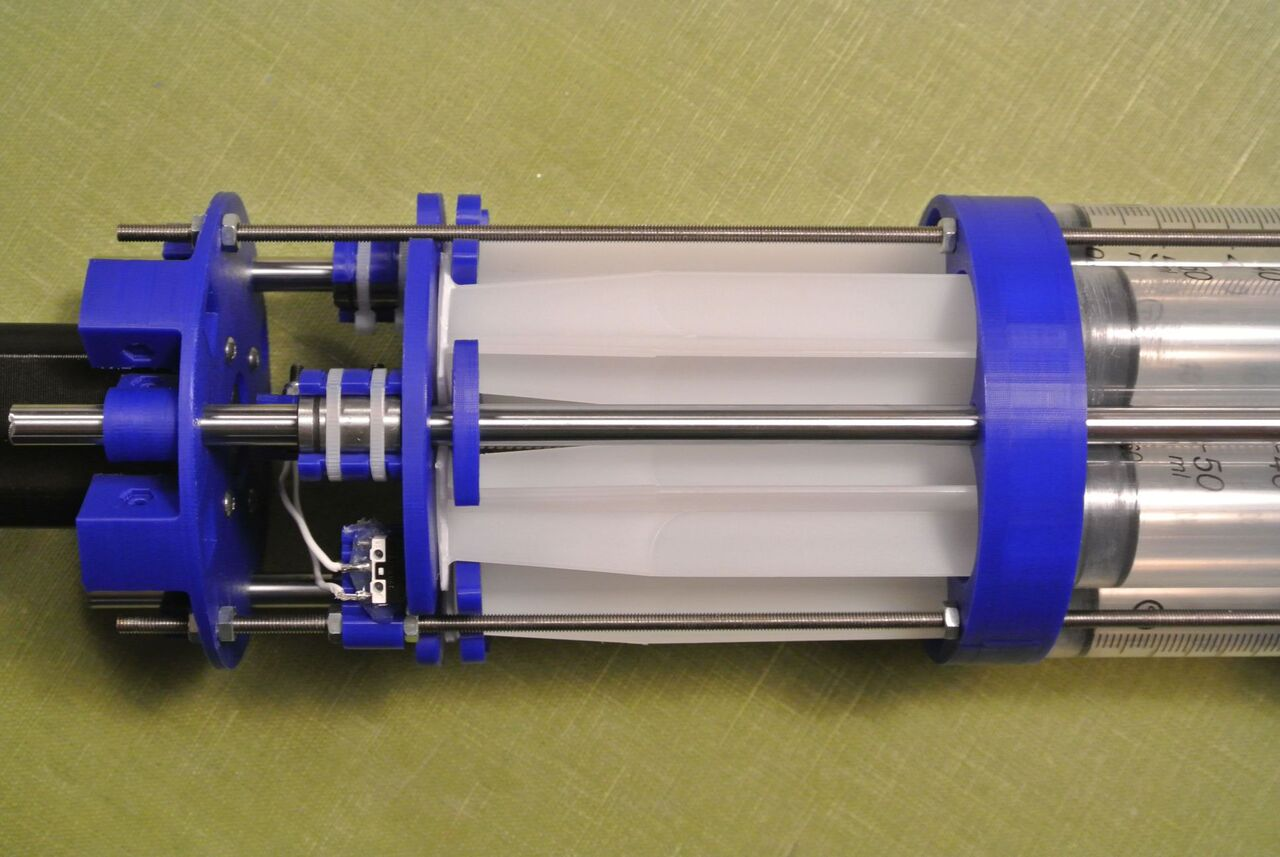
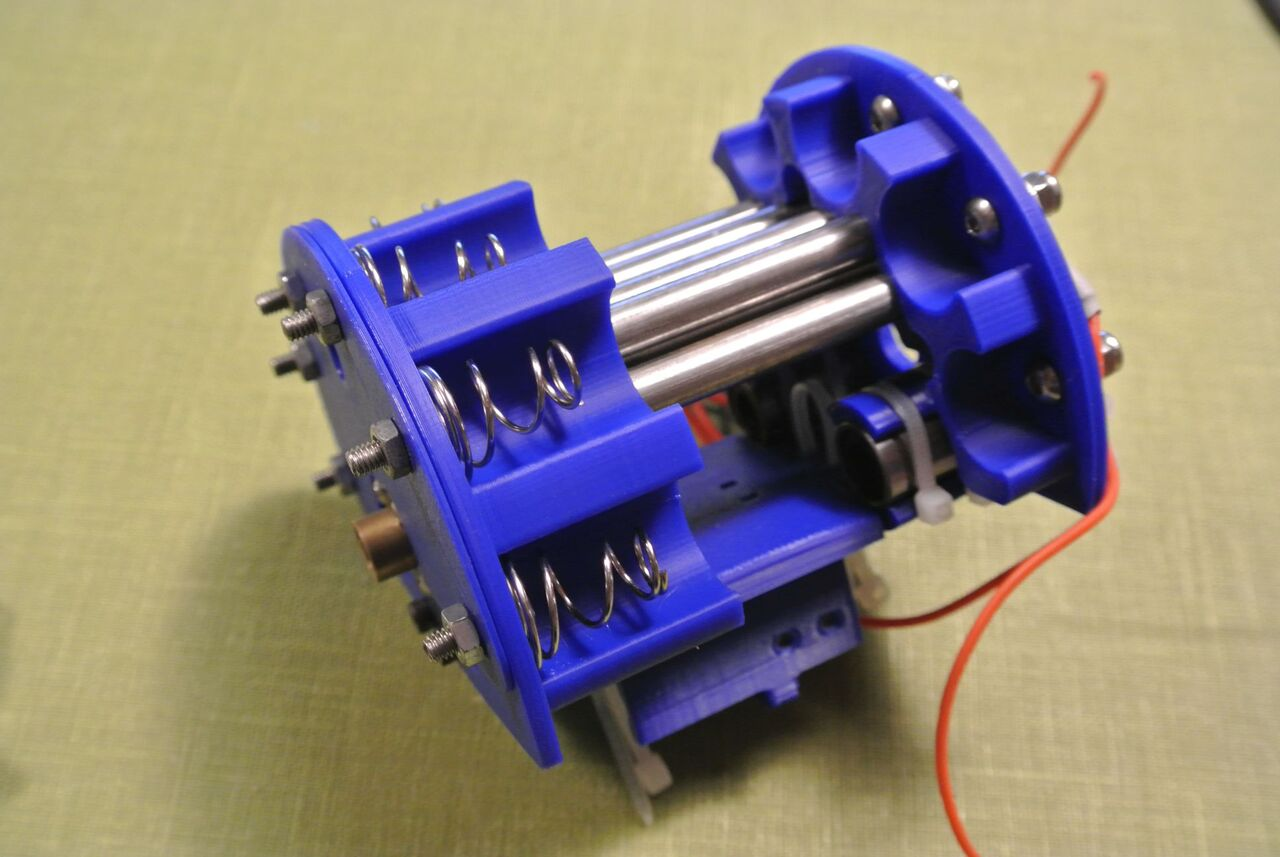
Put a single M4 nut onto each of the three M4 threaded bars on the buoyancy engine. Connect the stepper motor plate to the buoyancy engine, making sure that the acme screw goes all the way in. The smooth bars should be flush with the bar clamps (in the image below there is a 2cm offset). Also make sure that the top of the stepper motor mount plate is attached to the top rod (the one that has the ridges on the syringe clamps). Fasten the stepper motor plate in place using 3 more M4 nuts on the threaded bars.
Tighten the bar clamps using 3 M3 10mm bolts and 3 M3 nuts. Thread the endstop wiring through the wiring hole and secure using a zip tie.
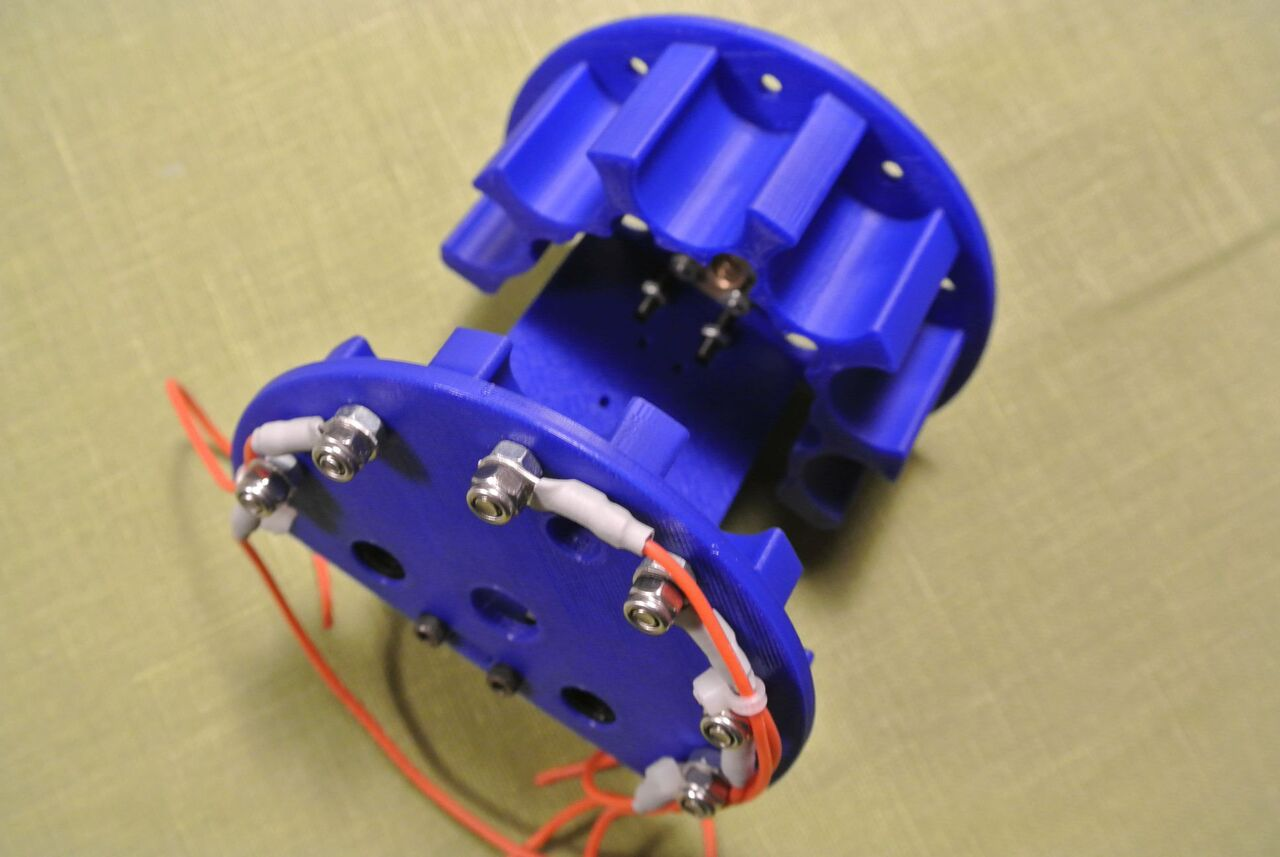
Attach a M3 16mm bolt to the “Buoyancy_enigne_bearing_plate” and fasten with an M3 nut. Also place an M8 nut into the centre of “Buoyancy_engine_bearing_plate”.
Attach 4 of the 70mm bars to the “Buoyancy_engine_bearing_plate” using 4 M3 16mm bolts and 4 M3 nuts.
Attach this small assembly to the main buoyancy engine build, making sure that the orientation is correct. Secure this using 4 M3 16mm bolts and 4 M3 nuts. Secure the wires through the wiring gap using zip ties.
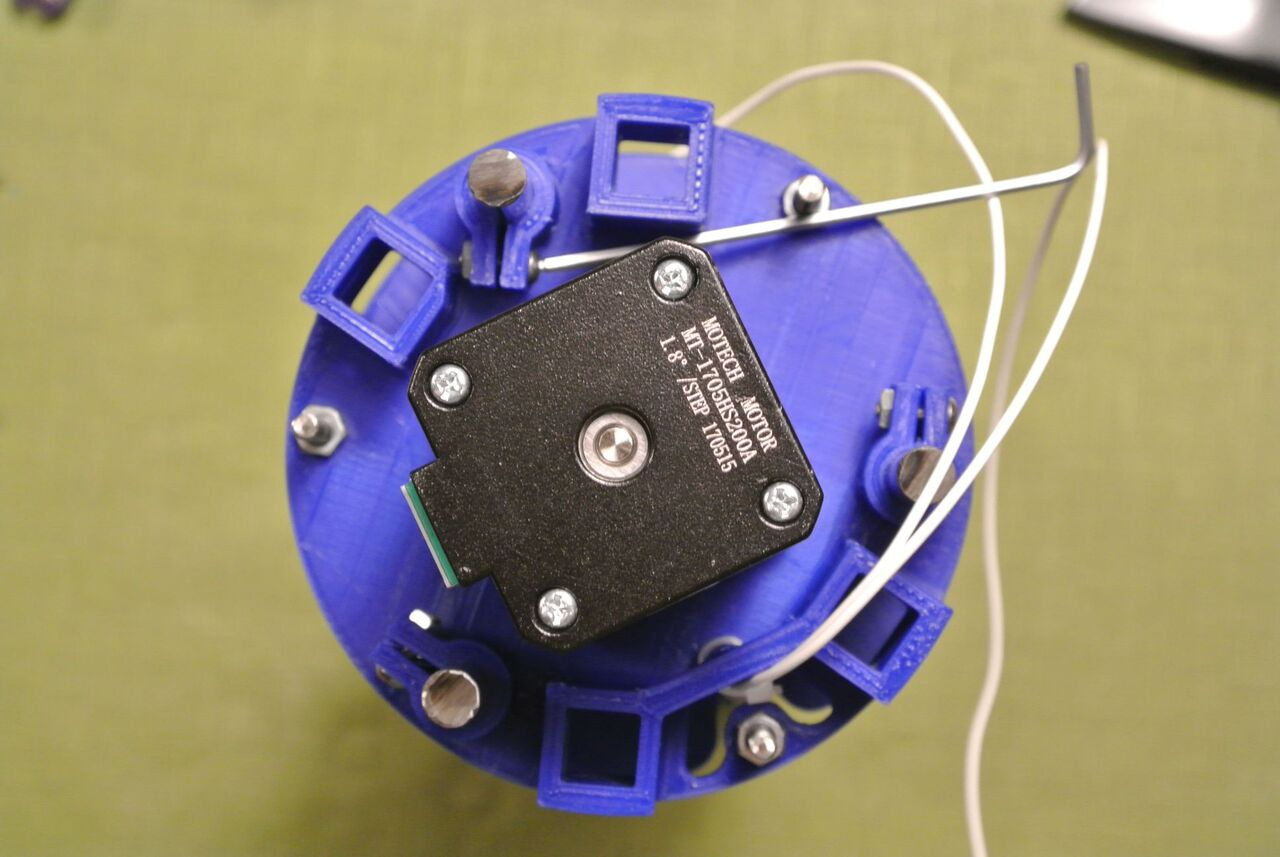
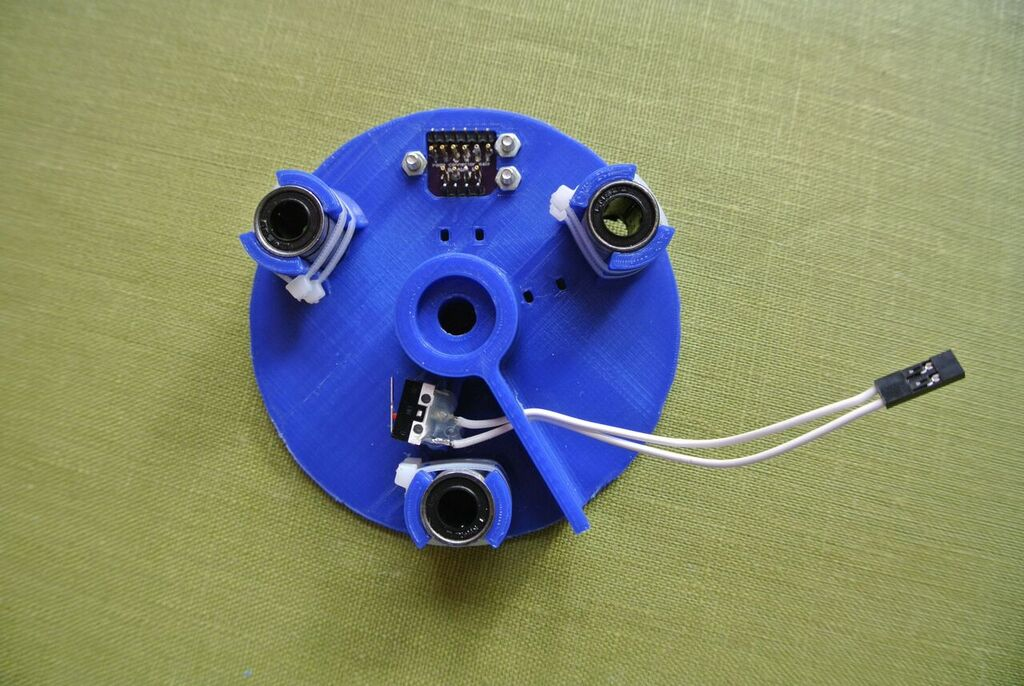
Mount 3 LM8UU bearings to the “Pogo_header_front_mount” using zip ties. Also hot glue the micro lever switch with the shorter wiring to the endstop platform. Make sure that the hot glue does not interfere with the movement of the lever.
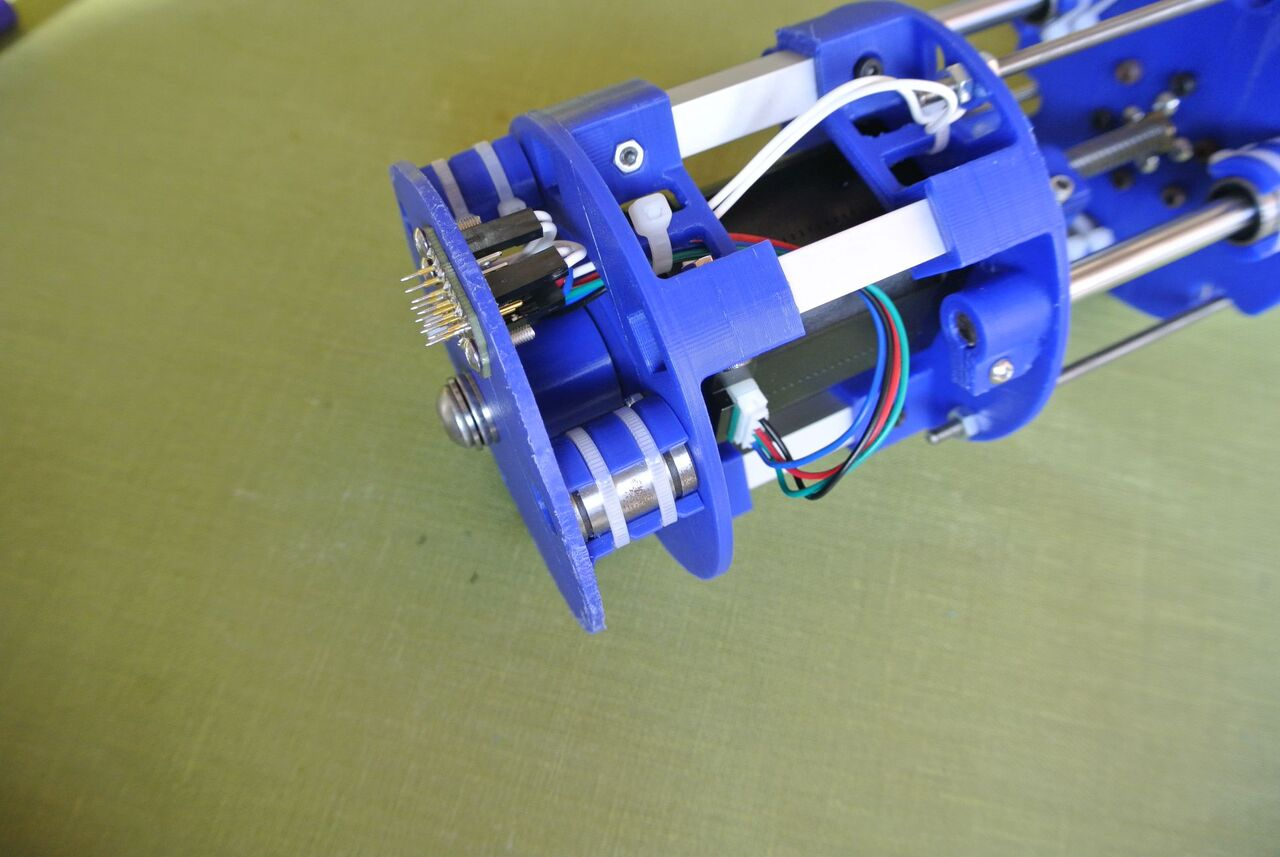
Using 3 M3 10mm bolts and 3 M3 nuts, fasten the “Pogo connector male” PCB to the stepper motor plate as shown below.
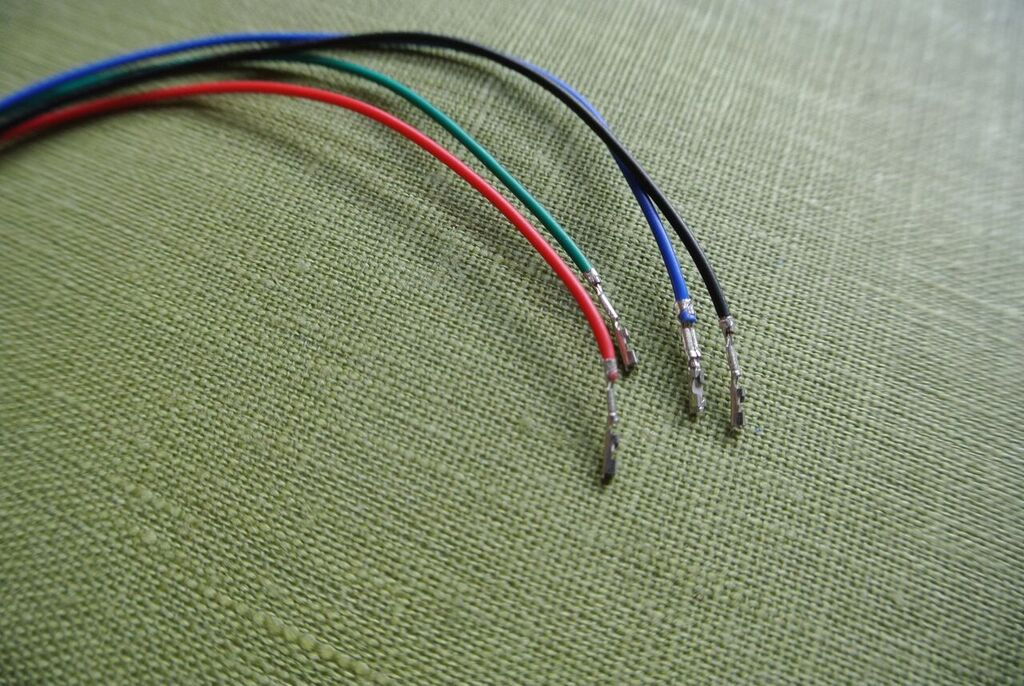
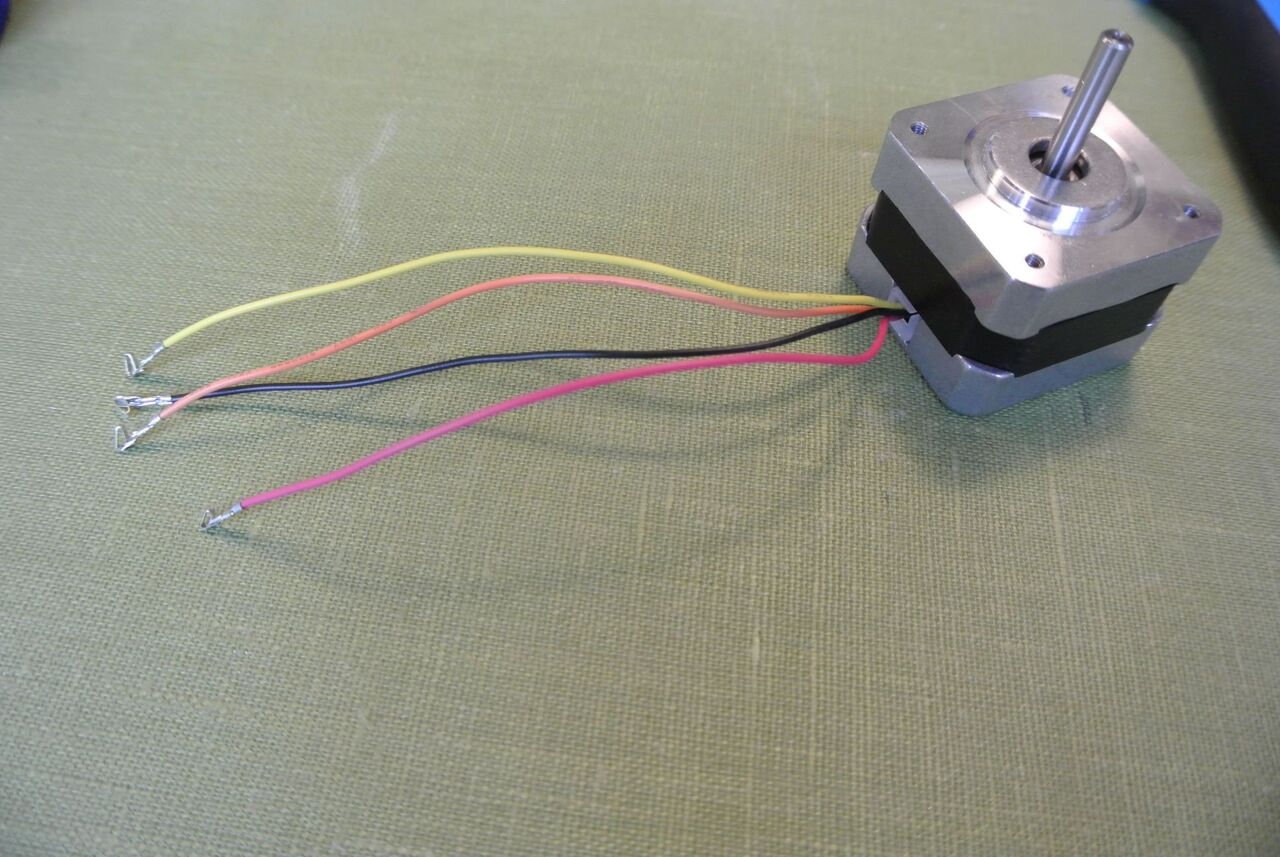
Cut the wiring for the buoyancy engine to a length of ~25cm. (the stepper motor I used had a separate wire, if your stepper motor has the wire directly attached that doesn’t matter). Strip the ends of the wires and crimp using the female 0.1” header contacts. Plug the wires into a 4 contact 0.1” female header (in the same order as the original cabling).
Plug the stepper motor into the bottom 4 pins of the pogo header. Plug the two endstops into the 6 pin top row. Also use a zip tie to secure the wiring into place. Also add a F8-16M bearing into the centre of the part.
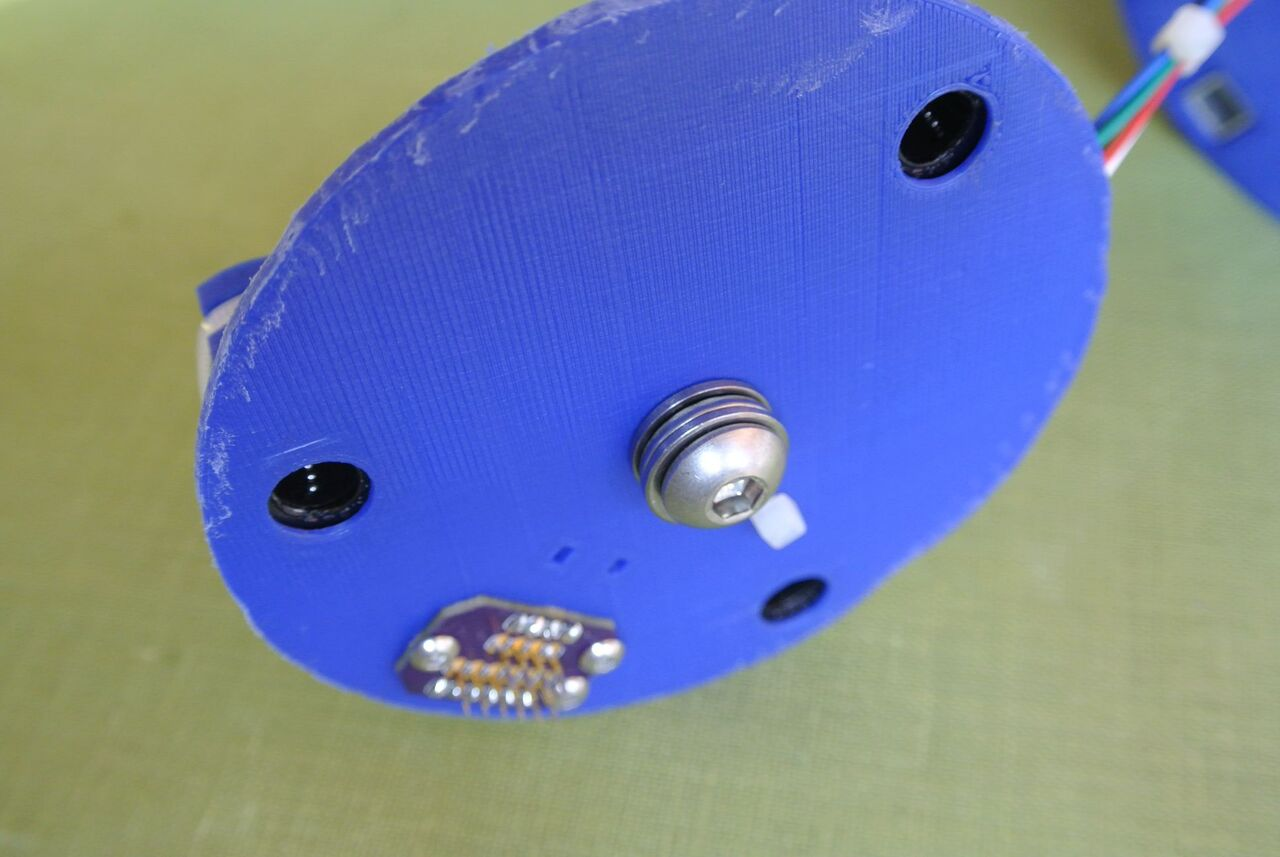
On the other side of the part add a M8 40mm bolt and another F8-16M bearing as shown. Use these to screw this part onto the rest of the buoyancy engine. Use zip ties to secure any wires that are moving too freely but make sure that the plate is still able to fully rotate and press the rotational endstop.
The front section of the glider is now assembled
-
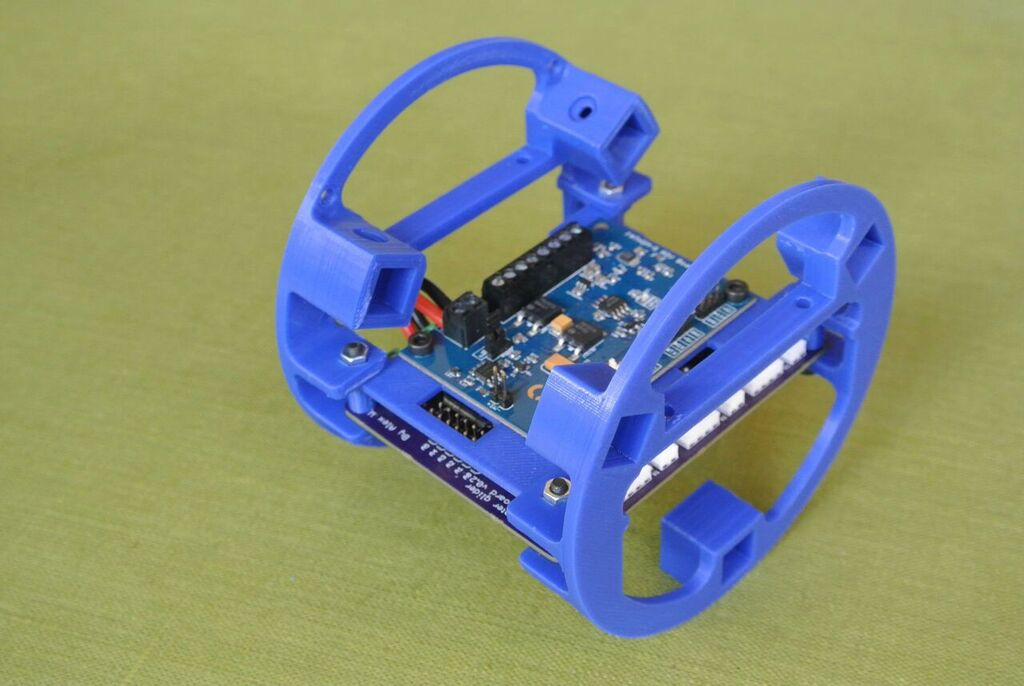
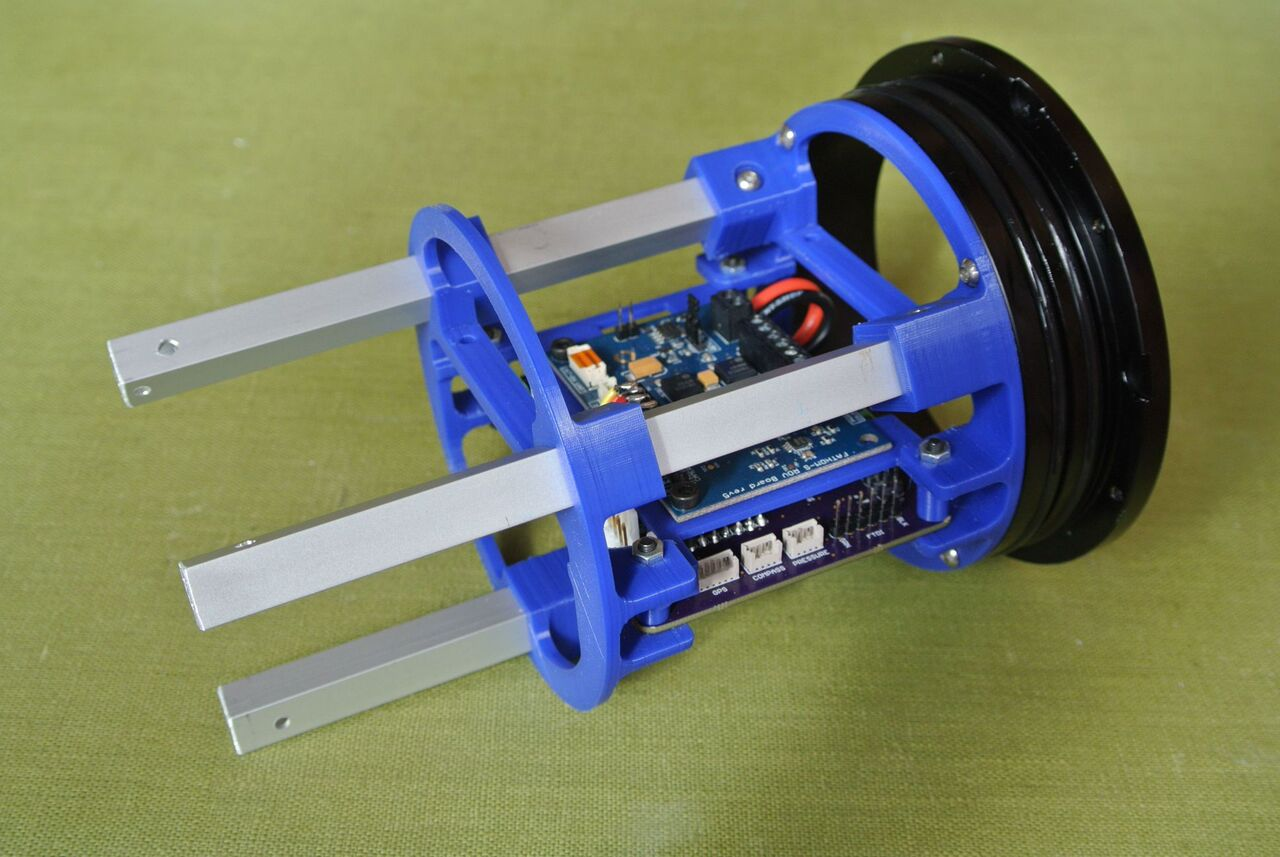
19Backend assembly
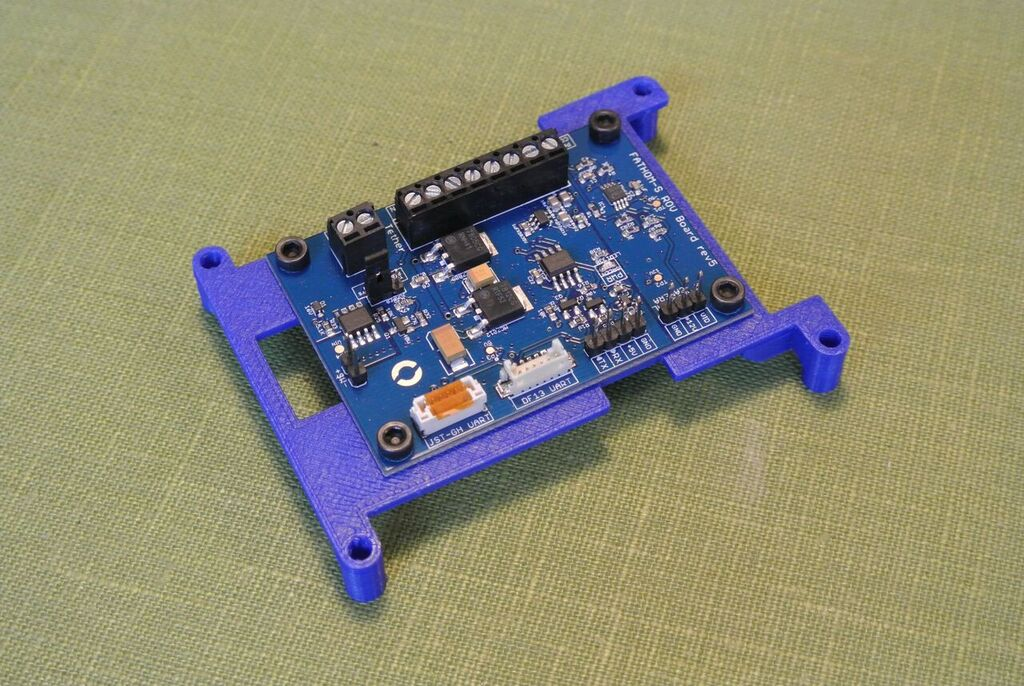
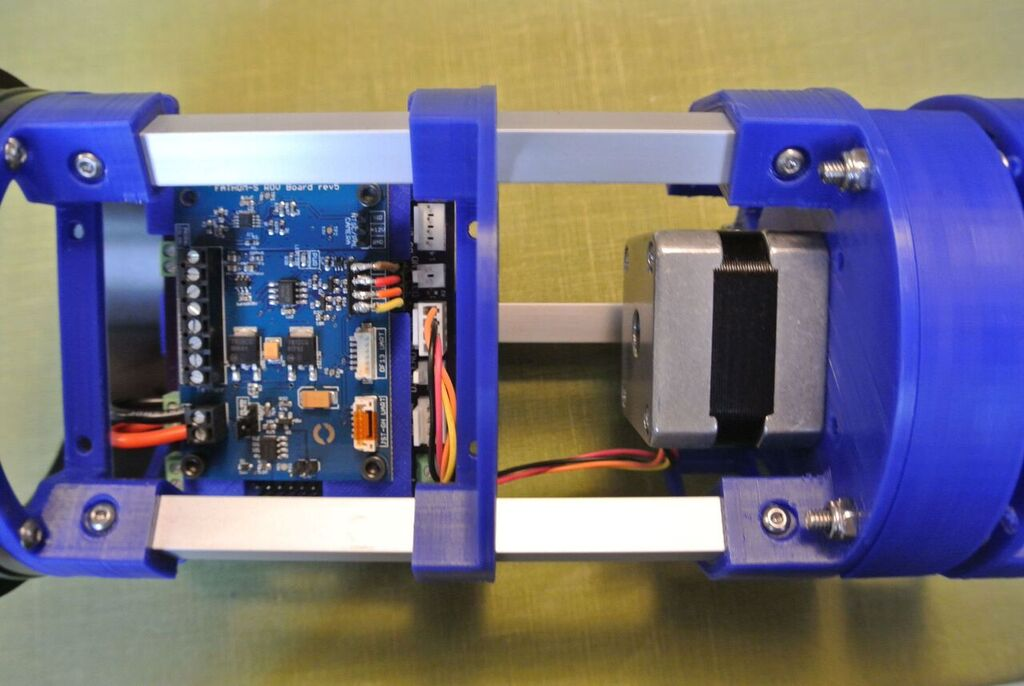
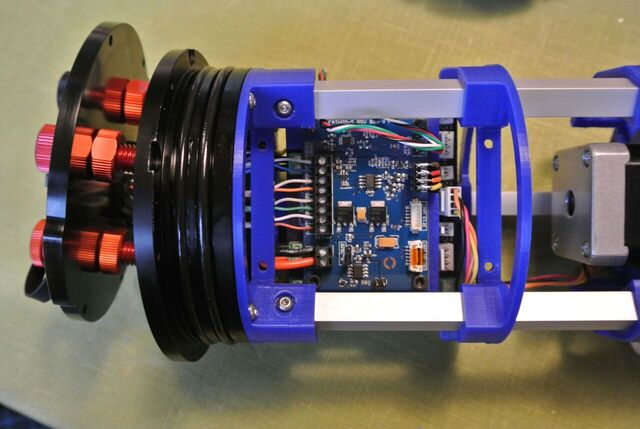
Attach the Fathom-S ROV board to the “Fathom-S_mounting_bracket” using 4 M3 10mm bolts and 4 M3 nuts, making sure that the orientation of the board is correct.
Cut 2 sections of red and black silicone wire and strip the ends. Use this wire to connect the Fathom-S ROV board to the control board PCB.
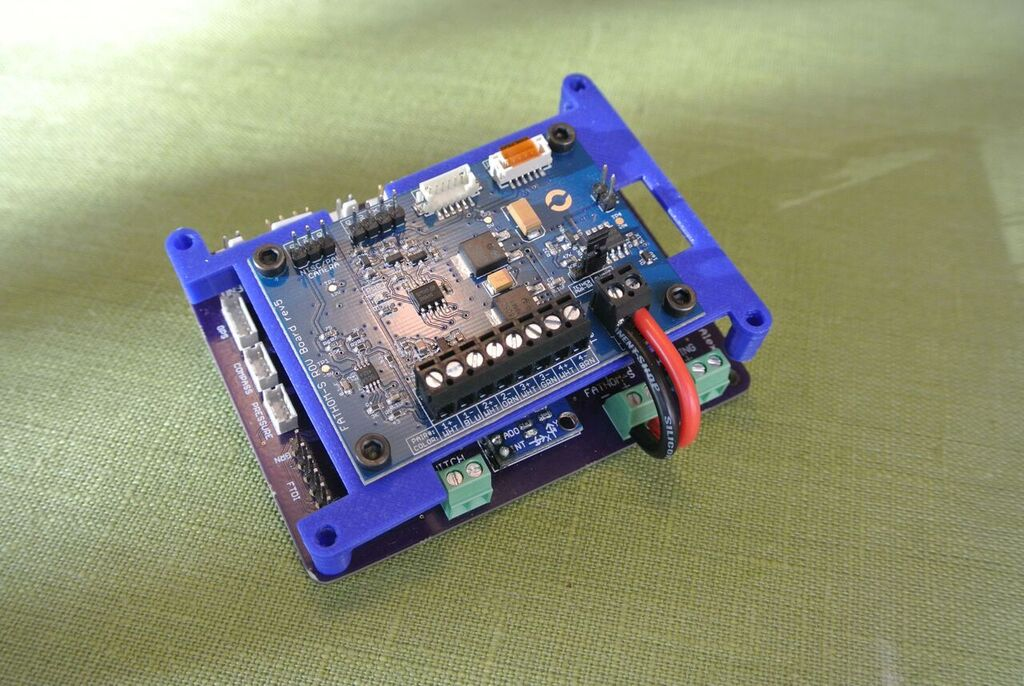
Using 2 M3 16mm bolts and 2 M3 nuts, attach the back of the PCBs to the “Circuit_rack_endcap_mount”, use the first image below to just check the orientation of the boards.
Using 2 M3 16mm bolts and 2 M3 nuts connect the PCB rack to the part “Circuit_rack_end”.
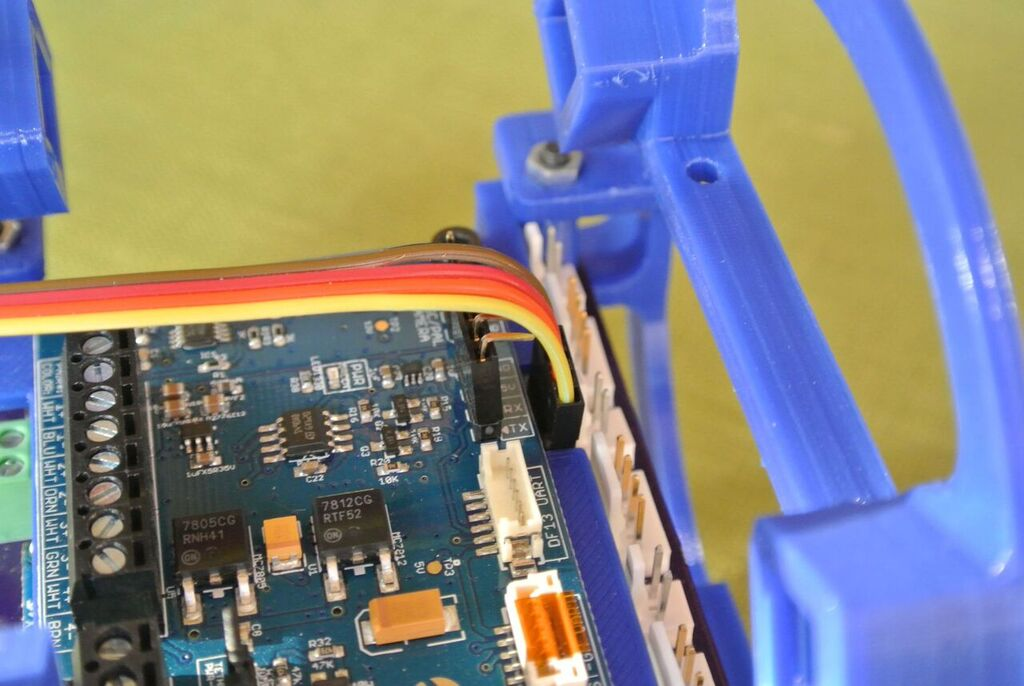
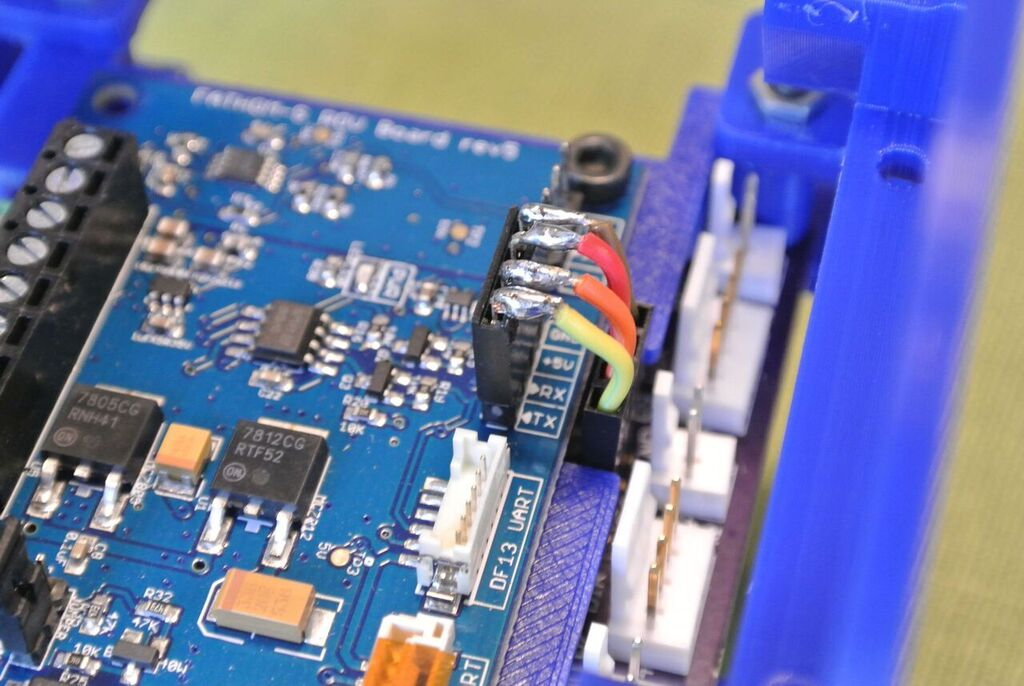
Plug in a 4 way female header cable into the control board in the indicated section. Also connect a 4 pin 0.1” female right angle header to the Fathom-S board. Use these to cut the cable to a correct length to connect to the right angle header. Strip the wires and solder the two connectors together.
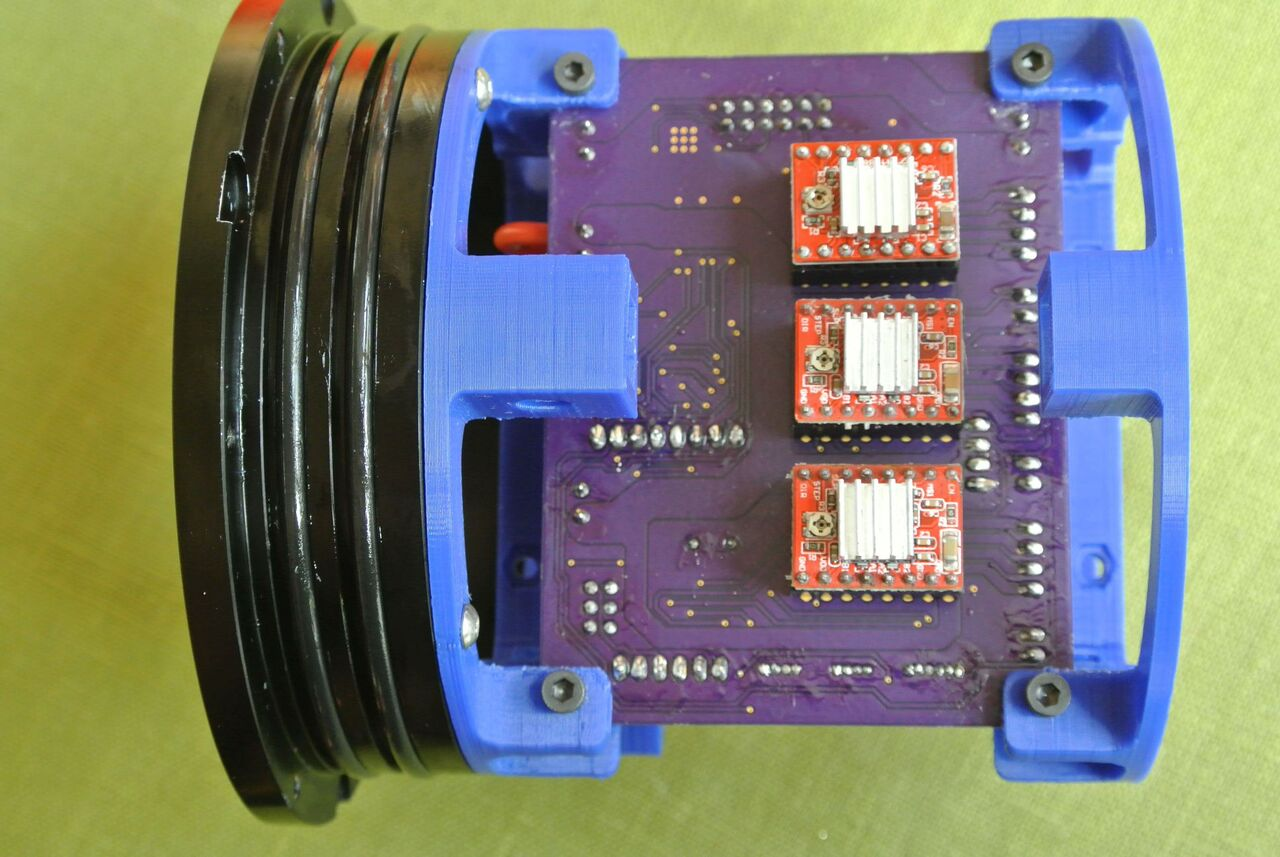
Using 4 M3 10mm bolts attach the endcap to the assembly so far. Make sure that the orientation of the endcap is correct with relation to the assembly, refer to the image below for the correct orientation. Add the three stepper motor drivers to the board, making sure that the orientation is correct (refer to the second image for the correct orientation)
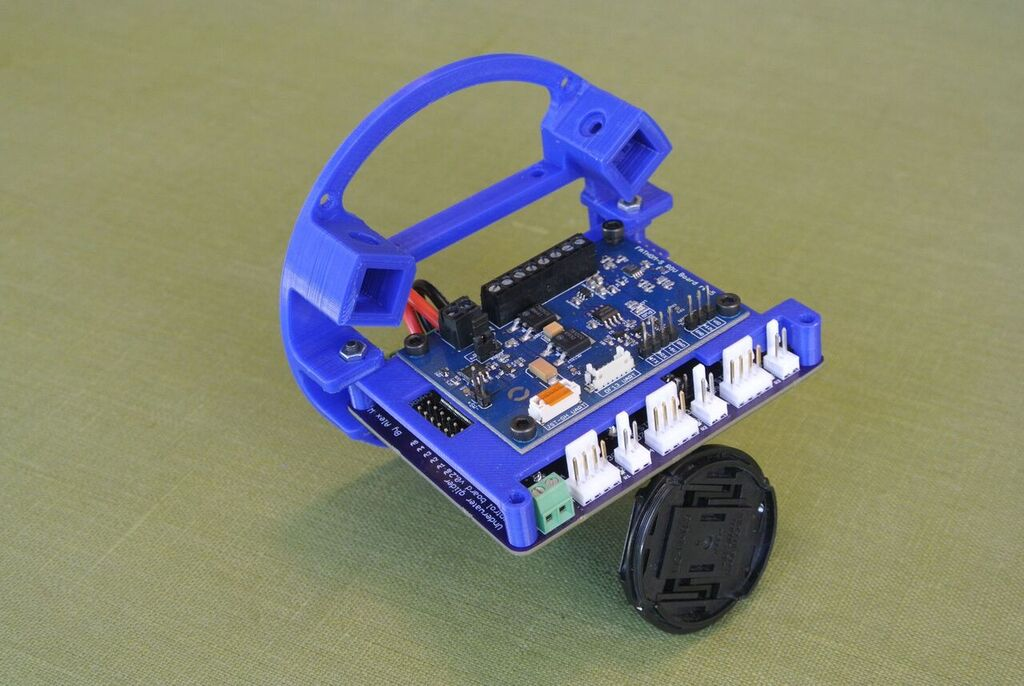
Attach the 3 145mm aluminum bars to the backend using 3 M3 16mm bolts and 3 M3 nuts.
Mark on the bottom where the potentiometer of the centre stepper motor driver and then drill it out so you can adjust the centre potentiometer.
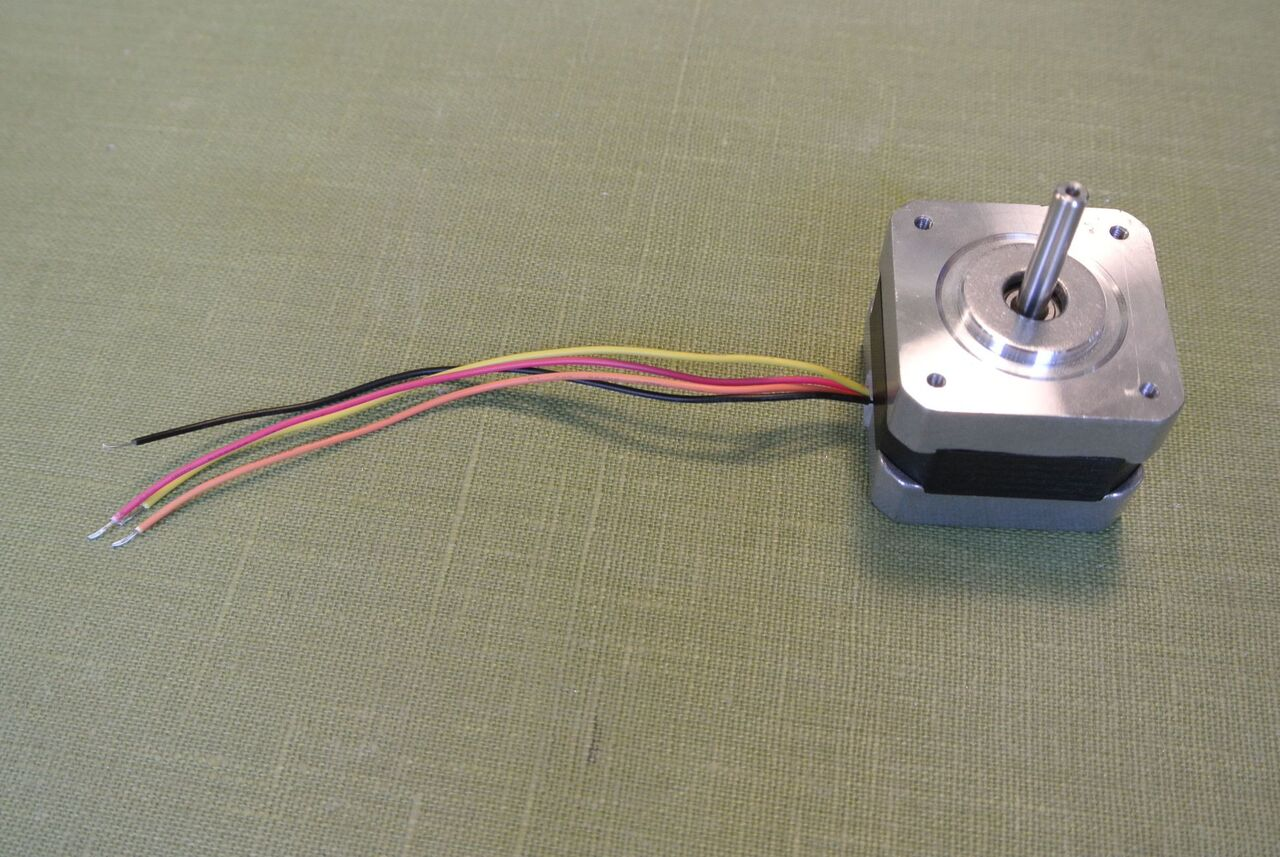
Trim the 34mm NEMA 17 motor’s wires to a length of ~15cm and strip the ends of the wires. Crimp the Molex KK series female contacts onto the end of the wires and fit the wires into the 4 pin molex KK series female header, making sure that the order of the wires is the same as the original.
Using 4 M3 10mm bolts, attach the stepper motor to the “Roll_motor_mount” part.
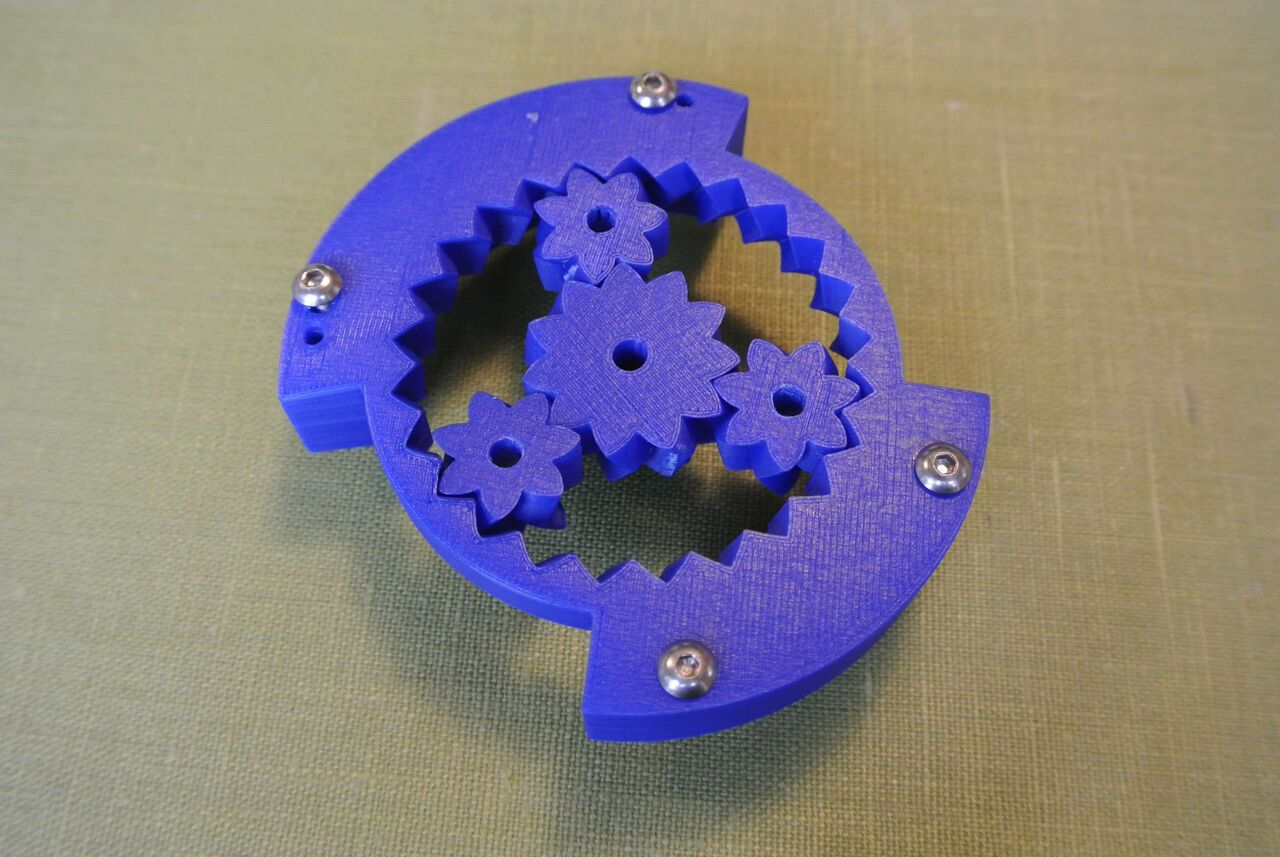
Put 4 M4 30mm bolts through the planetary gearbox system as indicated. On the other side fit 2 M3 16mm bolts through the central motor shaft clamp and hold them in place using 2 M3 nuts. Also put 3 M4 25mm bolts through the planet gears, each with a F4-9M bearing as shown. Also fit another F4-9M on the other side of the planets.
Attach the “Pitch_motor_back_plate” to the planetary gearbox by fastening using 3 M4 nuts.
Attach the planetary gearbox assembly to the stepper motor plate. Fasten the two parts together using 4 M4 nuts. Make sure that the sun gear is fully onto the motor shaft and that the sun gear/planet gears/the exterior gear are all aligned. Tighten the bolts on the motor shaft clamp to secure the sun gear to the motor shaft.
Attach the planetary gearbox assembly to the main backend section. Secure using 3 M3 16mm bolts and 3 M3 nuts. Plug the planetary gearbox stepper motor into the central motor plug.
Cut a 10cm section of the Fathom tether cable and remove all insulation until you get to the wire pairings. Then remove a couple of centimetres of pair sheath from each end of each wire and strip the individual wires (apart from one end of the brown wire). Using either a crimping tool or pliers, crimp the ends of the 7 (not the still insulated brown wire) with the female contacts from the PX0727/S Bulgin buccaneer panel mount receptacle. Tin the other ends of the wires lightly.
Cut a ~13cm piece of black silicone power wire and strip a small section (~5mm) about 4cm from the end. Now strip the end of the brown wire and wrap it around the uninsulated section of the black wire. Solder the connection and add heatshrink. Strip the end of the black wire and crimp one of the remaining female contacts from the PX0727/S Bulgin buccaneer panel mount receptacle.
Cut a ~13cm section of the red silicone power wire and crimp one of the female contacts from the PX0727/S Bulgin buccaneer panel mount receptacle.
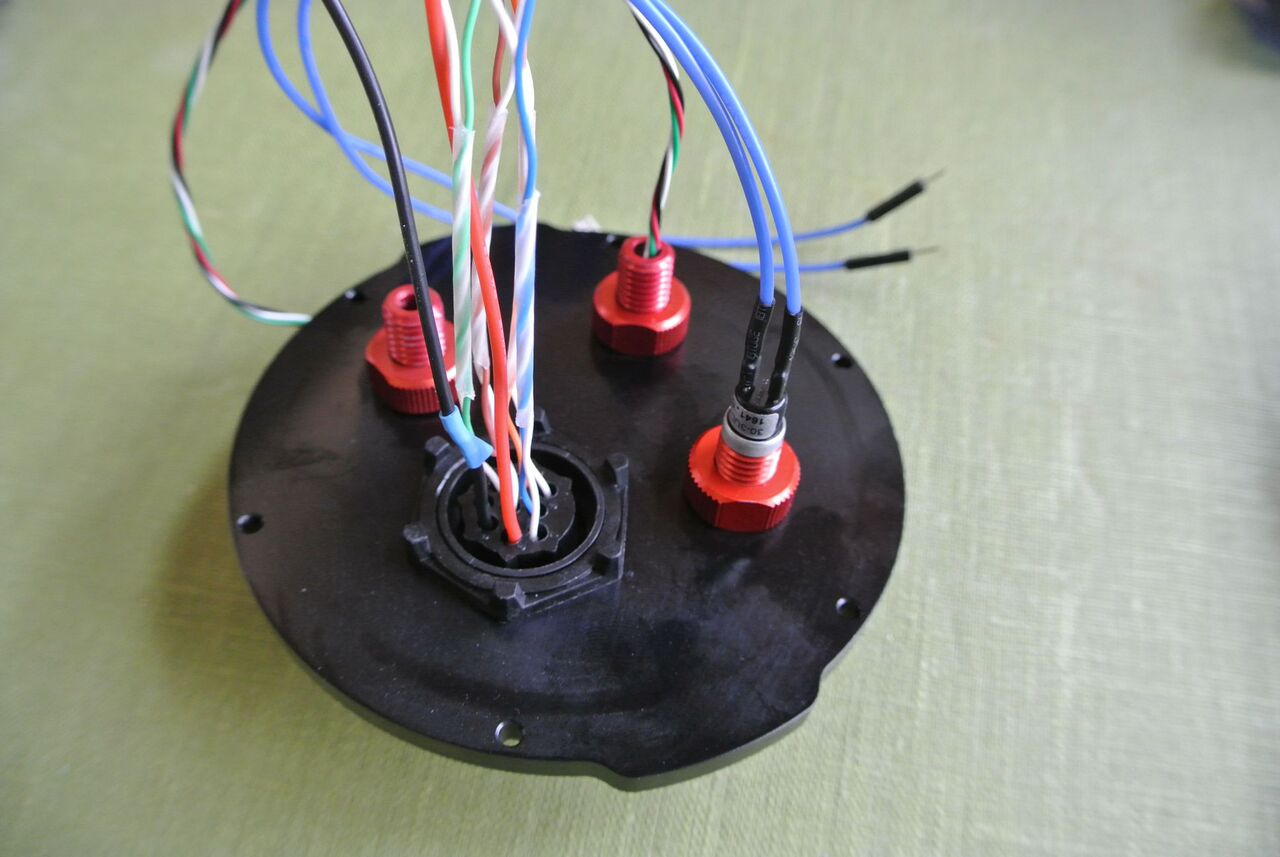
Now hookup the wires/power cables into the Bulgin connector in the endplate as follows:
Orange white - 1
Orange - 2
Green white -3
Green - 4
Black power - 5
Red power - 6
Blue white - 7
Blue - 8
Brown white - 9
Apply silicone grease to the o-rings of the underwater switch and the pressure valve, then fit these and apply silicone grease to the main o-rings of the switch, pressure valve and pressure sensor.
Fit the pressure valve, pressure sensor and the underwater switch to the endplate as shown below and then secure using the nuts. Also fit the Bulgin cap to the underwater connector.
Attach the wires to the Fathom-S board in their indicated positions (the ROV board says which wire to be plugged in where). Also attach the switch connectors to the control board and the power wires to the power screw terminals of the control board. Do not forget to add the thinner o-ring to the endcap. (Add silicone grease before putting in position).
Use 6 M3 16mm bolts to secure back endplate to the endcap, fastening the tail endcap shroud. Make sure that the bolts used here are stainless steel.
-
20Battery and pitch assembly
Cut 12 lengths of ~15cm wire (6 of black silicone and 6 of red). Strip the ends and crimp/solder them to the M4 crimp terminal connectors. Cover the connection using a short piece of heatshrink.
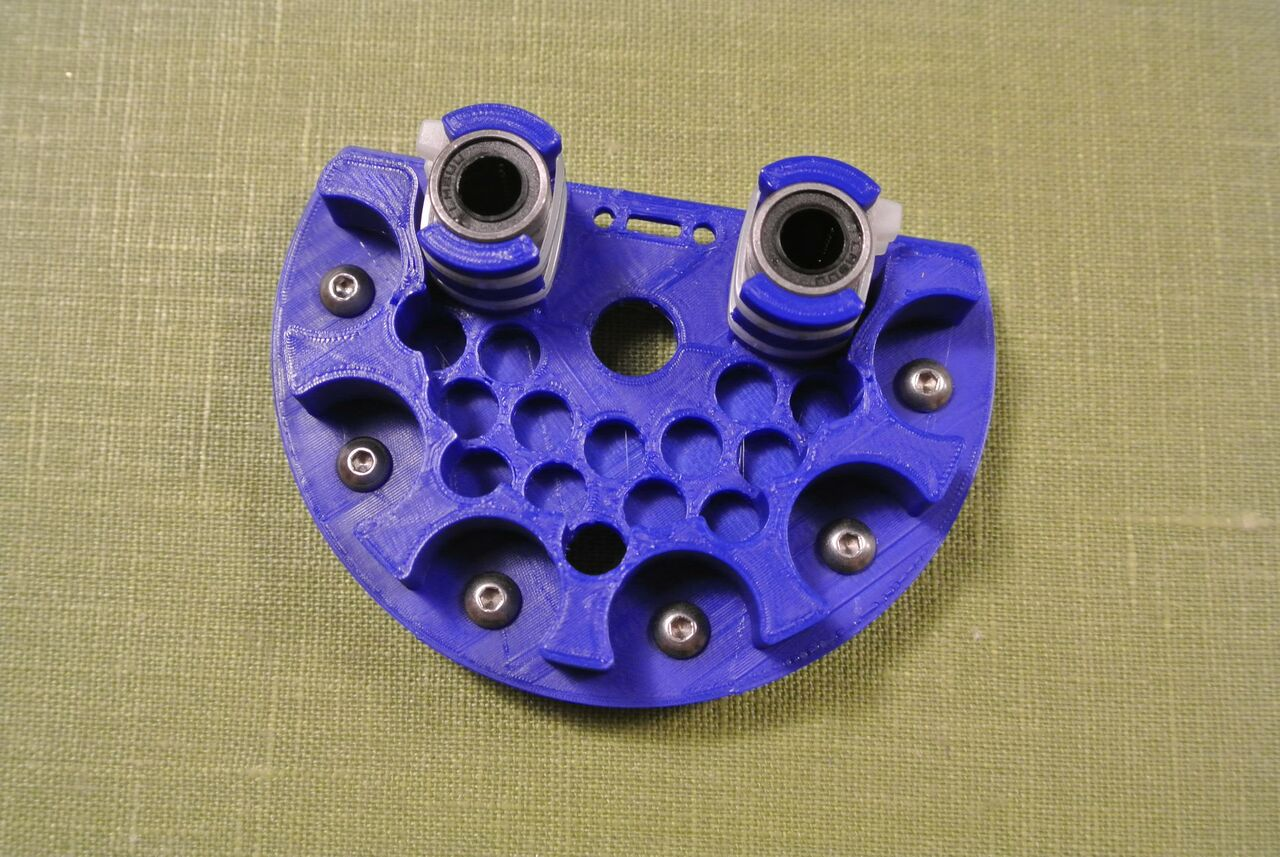
Place 2 LM8UU bearings into the part “Battery_mount_bearings” and secure using zip ties. Place 6 M4 16mm bolts through the battery connector section and secure on the backside using 6 M4 nuts.
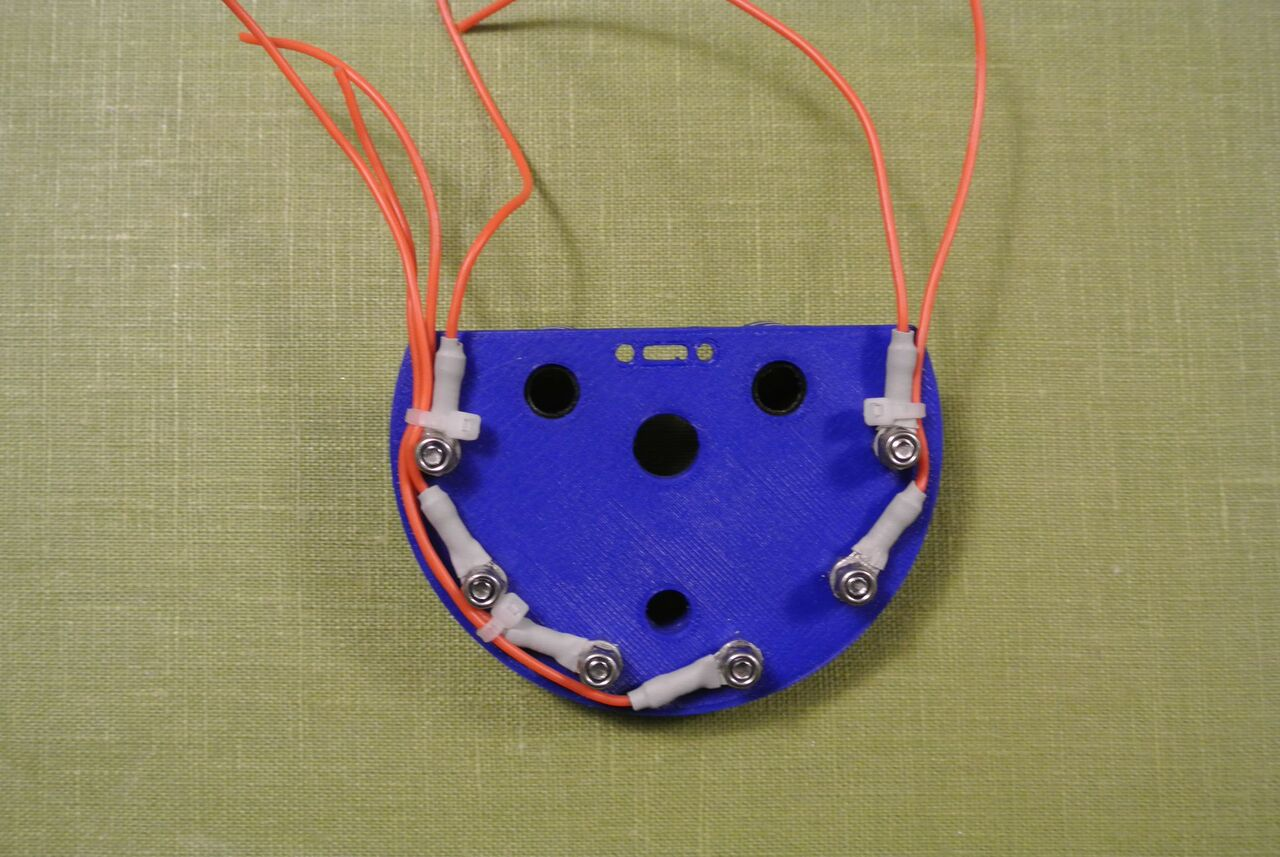
Using 6 M4 nuts, connect the red silicone wires to the backside of the part. Make sure that the bottom two wires go off towards the left (refer to the image). Secure the wiring using zip ties.
Attach the acme nut to “Battery_mount_acme” using 4 M3 10mm bolts and 4 M3 nuts.
Attach both ends of the battery mount to the “Battery_mount_connector” part using 4 M3 16mm bolts and 4 M3 nuts, making sure that all the parts are square. Also fit zip ties through the zip tie holes on the “Battery_mount_connector”.
Slide the 13 mild steel 87mm bar sections into the battery assembly. (Shown below is the step with only 9 bars, the other 4 bars should go in the 4 holes above the fitted bars.
Using 6 M4 16mm bolts, secure the “Battery_rods_cover” in place. The bolts should secure the C/D battery spring on the inside of the battery mount and the bolts should be secured on the exterior using 6 M4 nuts.
Slide the black terminal wires onto the bolts and secure using 6 more M4 nuts. Make sure that the bottom 2 wires point to the left. Zip tie the wiring to secure all the wires in place.
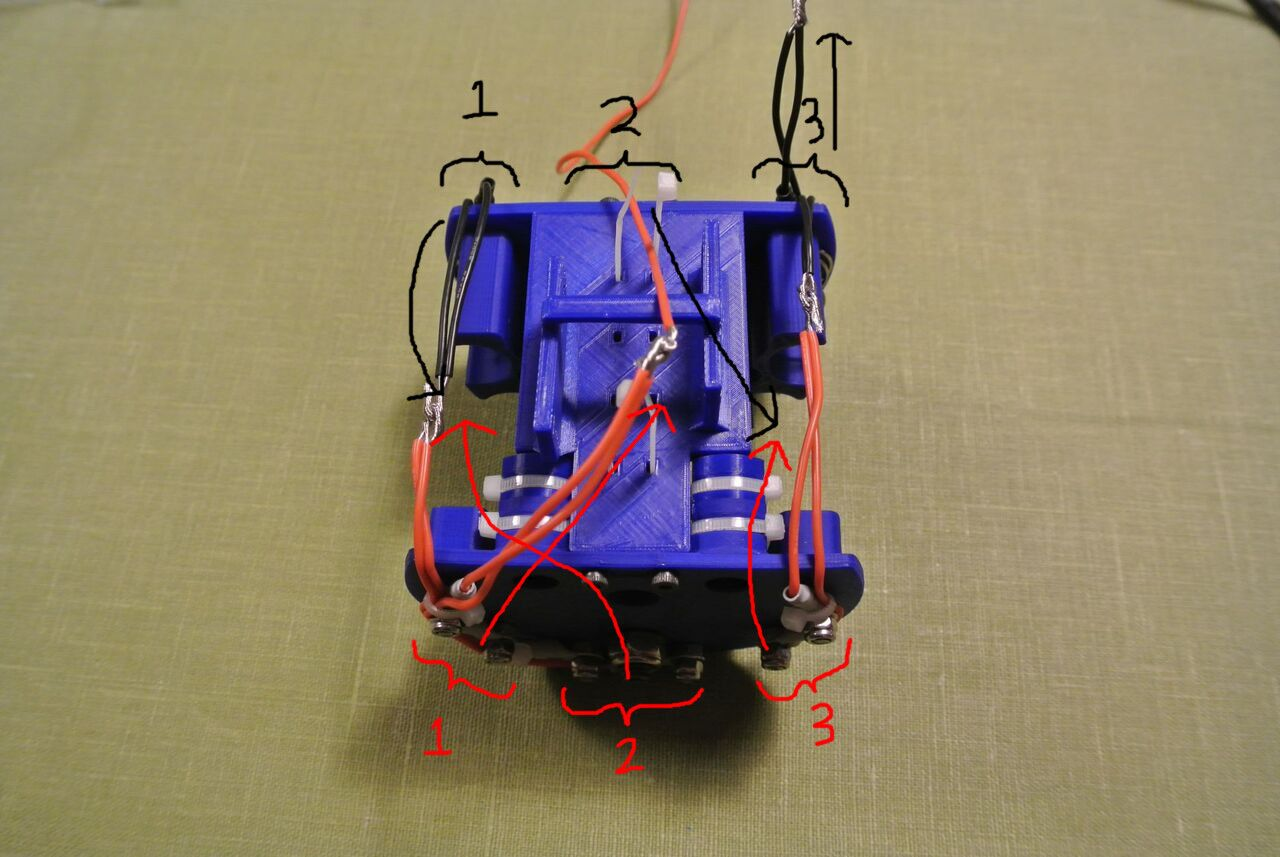
Orientate the battery as in the first image (the two images are the same but the second looks cluttered). Pair up the top and bottom sets of wires and number them as in the second image. (leftmost red pair = red 1, middle red = red 2, top right black = black 3 etc) Lay the wires in the correct hookup positions:
Red 1 - BATT+ output
Red 2 - Black 1
Black 2 - Red 3
Black 3 - BATT- output
Cut and strip the wires so that you can double them back to form strong solder connections. (Do not solder them yet)
Slide on some short heatshrink pieces onto the pairings, reform the joints (twist the connections so that they’re solid connections) then solder and cover with the heatshrink piece.
OSUG: Open-Source Underwater Glider
A versatile autonomous environmental drone using a buoyancy engine









































































































Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
ummm... why on gods greeen earth would you take 5 pressure fittings designed, to be threaded into things and hold pressure, and glue them into the aluminum plate??? seriously great job on the project but i can see many small things like this that show you have not any experience in actual industry.
the barbed 3/4 bspt hose nipples are designed to hold over 100 bar at the thread. you have actually chosen high pressure fittings and could have used much less heavy duty ones for your application. and the thread on the end of them is designed to be threaded into things. just a tip.
Are you sure? yes | no
I was a high school kid at the time lol. Very much agree, the general principles of the glider are okay, but the whole thing could be redesigned from the ground up and pretty much everything could be improved. (CAN control topology for the controls side, properly rated hydraulic pump, etc. etc.)
Are you sure? yes | no
Only the link for the PCB assembly. The Instructions for the body assembly seem disappear.
Are you sure? yes | no
Yeah, the body assembly that was up was for the first generation. I'm currently overhauling all of the instructions to update them to the third generation hardware. The Hackaday instructions editor is rather buggy (making editing slow) and I'm rather time busy at the moment, but I hope to have the new instructions up soon.
Are you sure? yes | no