 alexw
alexw-
21Middle section assembly
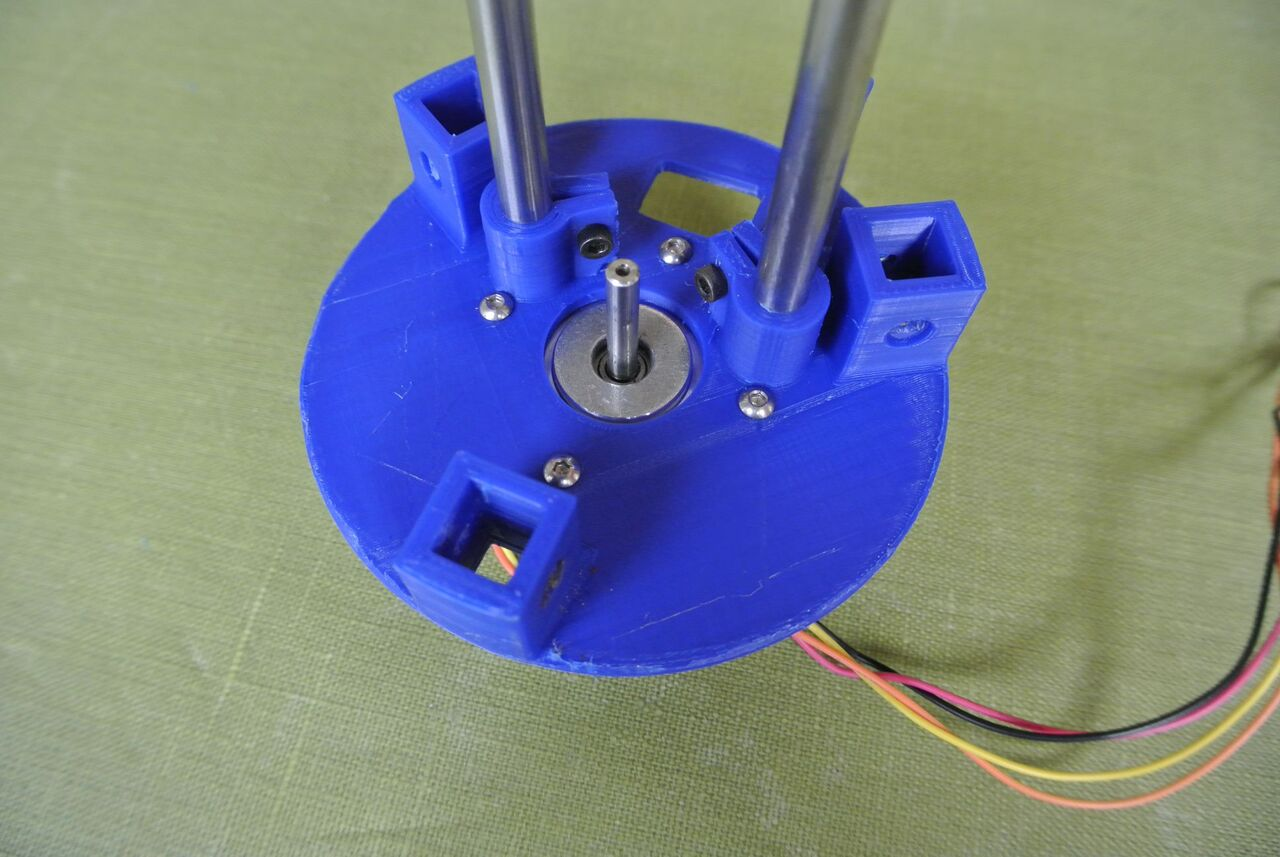
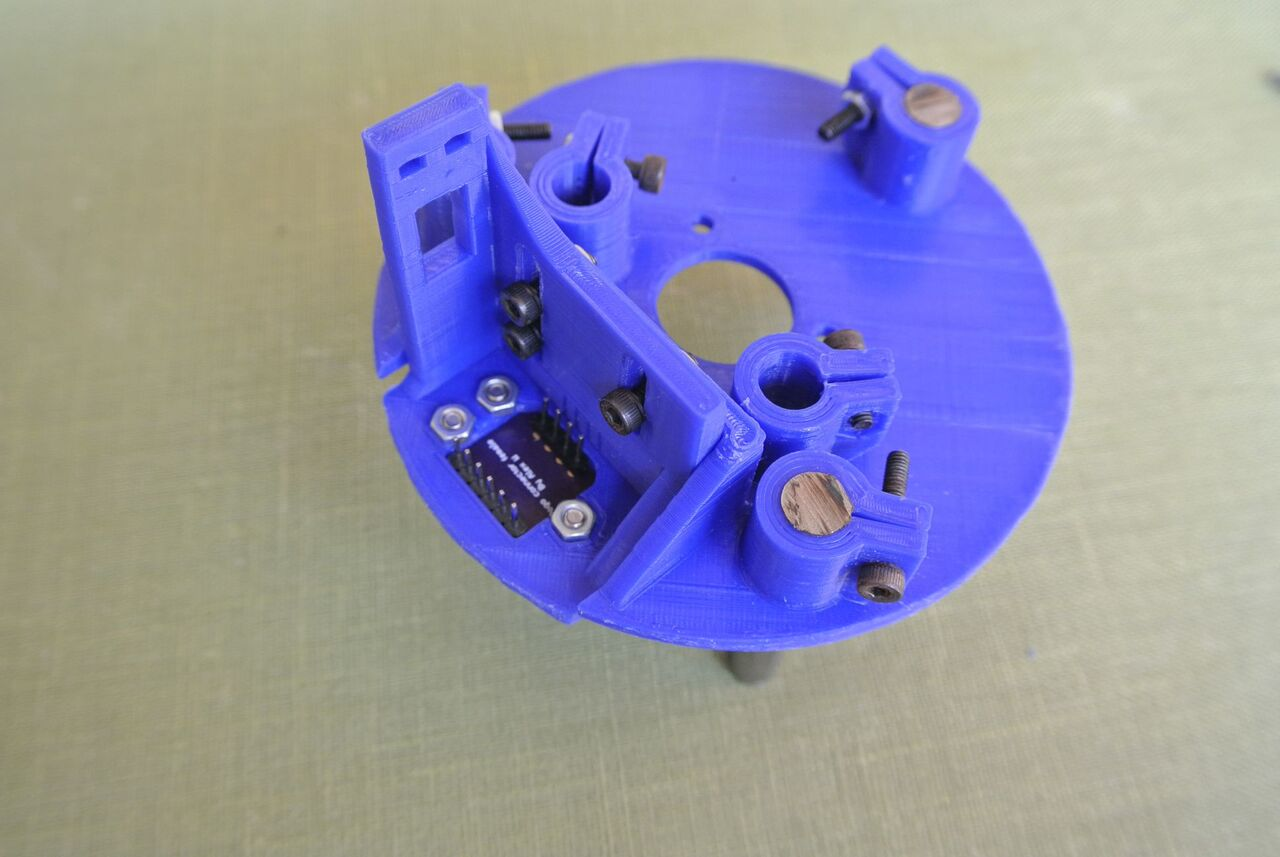
Fasten the 255mm smooth rods into the “Pitch_motor_mount” using 2 M3 10mm bolts and 2 M3 nuts.
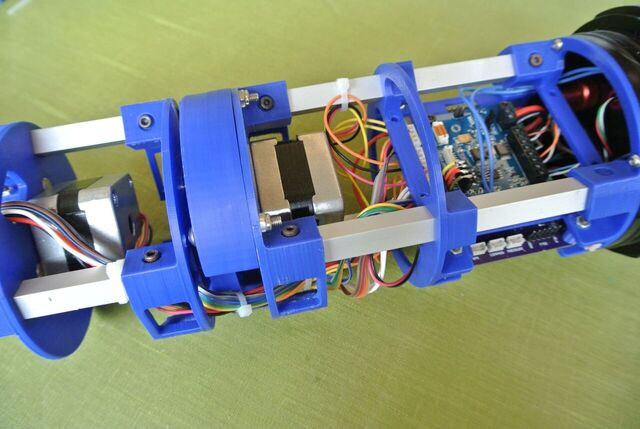
Using 4 M3 10mm bolts, connect the other 34mm NEMA 17 stepper motor.
Using 3 M3 16mm bolts and 3 M3 nuts, connect the 70mm aluminium bars to the planetary gearbox.
Using 3 M3 16mm bolts and 3 M3 nuts, connect this motor plate to the rest of the backend.
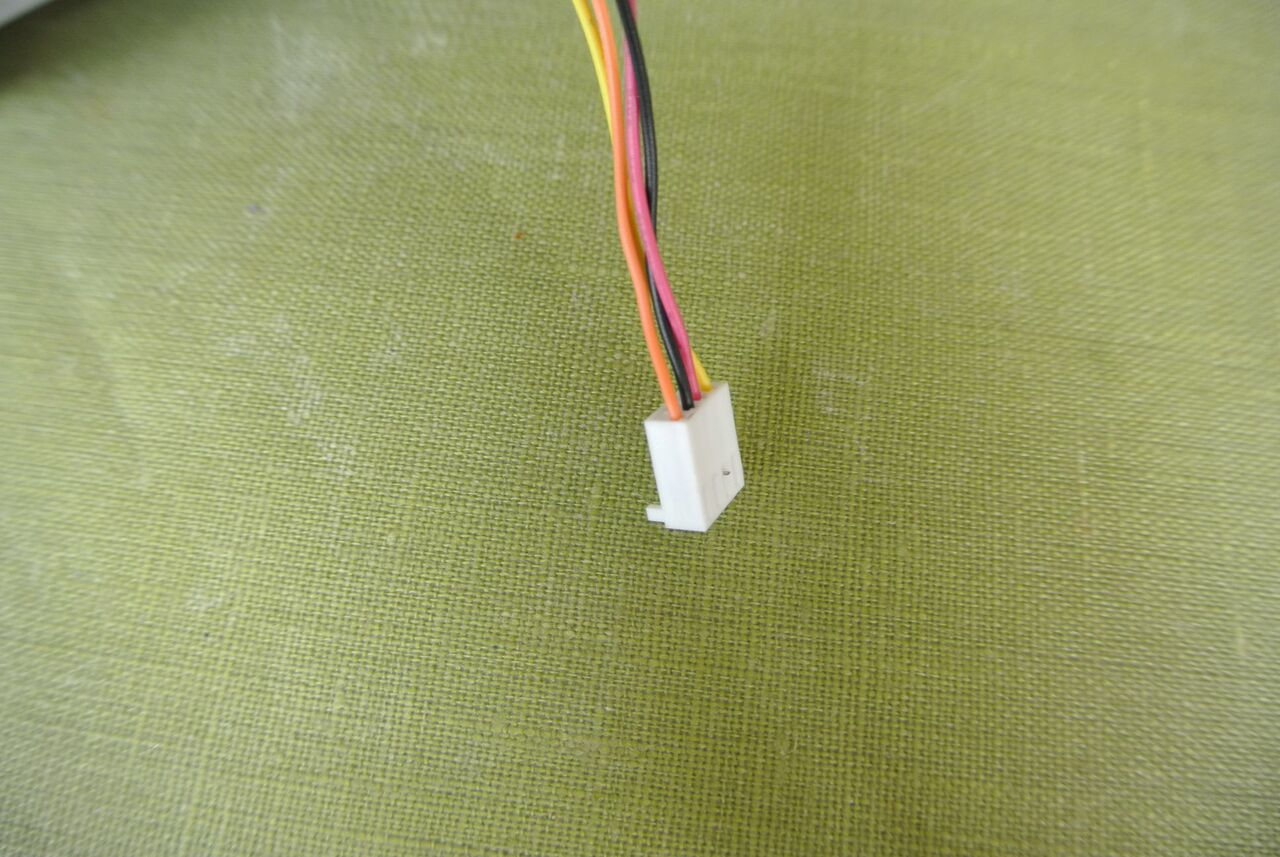
Cut the pitch stepper motor’s wires to a length of ~25cm. Strip the ends and crimp the Molex KK series female contacts onto the end of the wires and fit the wires into the 4 pin molex KK series female header, making sure that the order of the wires is the same as the original.
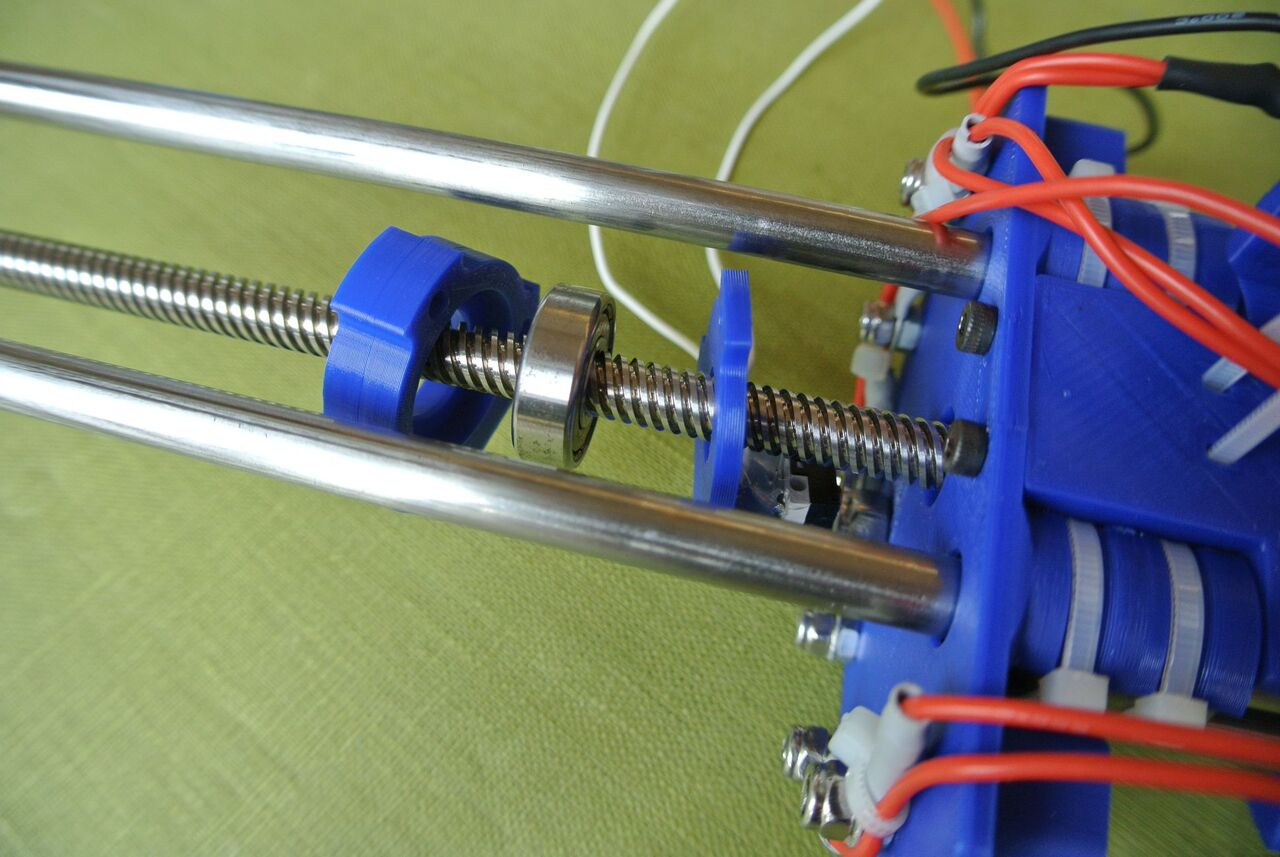
Put the other “Acme_motor_connector” part onto the end of the 245mm acme rod (You may need to use pliers again the lever the connector open). Slide the other end of the connector onto the pitch motor shaft and clamp the connector using 2 M3 16mm bolts and 2 M3 nuts.
Put the battery assembly onto the rods/acme rod. You will need to turn the acme rod once it goes into the acme nut.
On the “Pogo_header_slider_mount” attach the 3 45mm mild steel rods using 3 M3 16mm and 3 M3 nuts. Put the smooth rod bolts and nuts in place, ready for fitting onto the smooth rods. (2 M3 16mm bolts and 2 M3 nuts)
Connect the pogo female connector board to the “Progo_header_back_mount” using 3 M3 10mm bolts and 3 M3 nuts.
Using 3 M3 10mm bolts and 3 M3 nuts, connect the “Pogo_header_back_mount” to the “Pogo_header_slider_mount”.
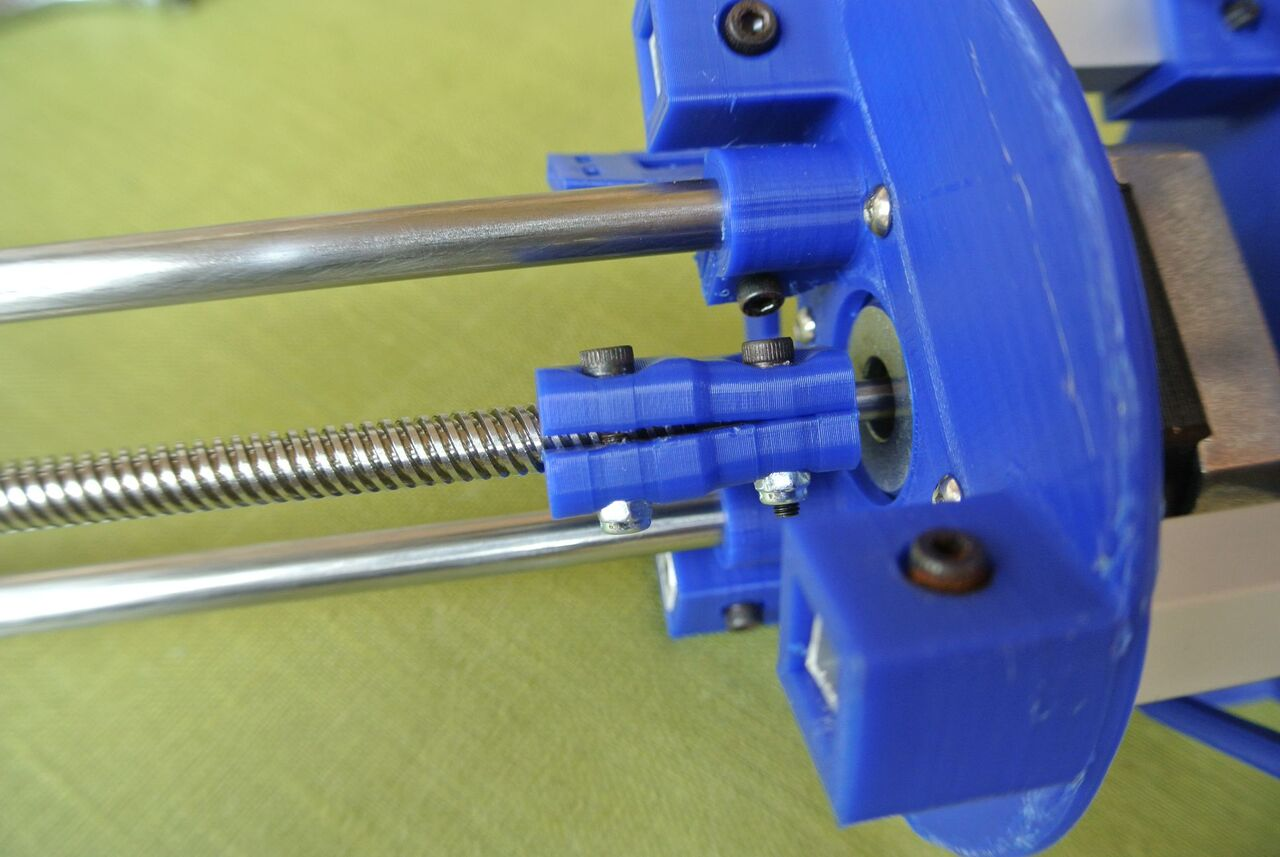
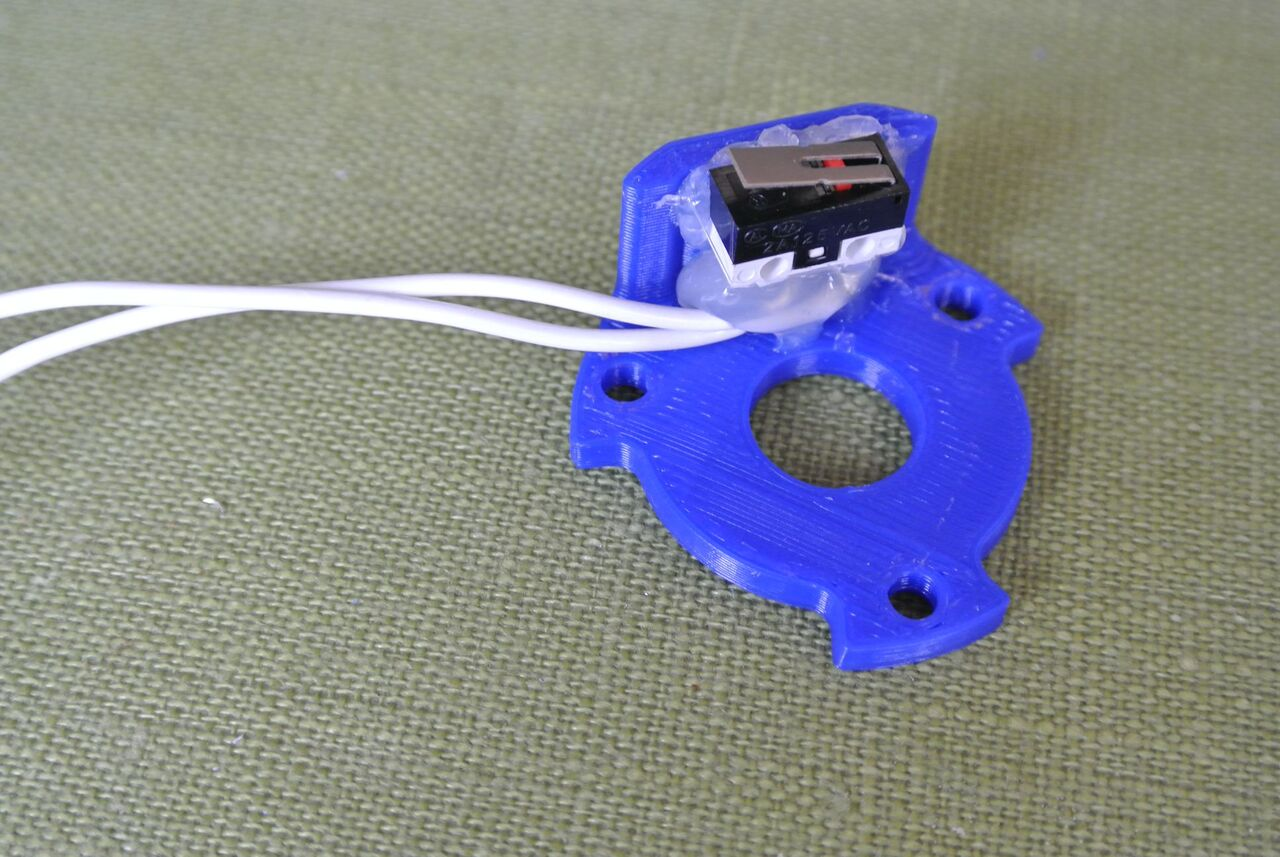
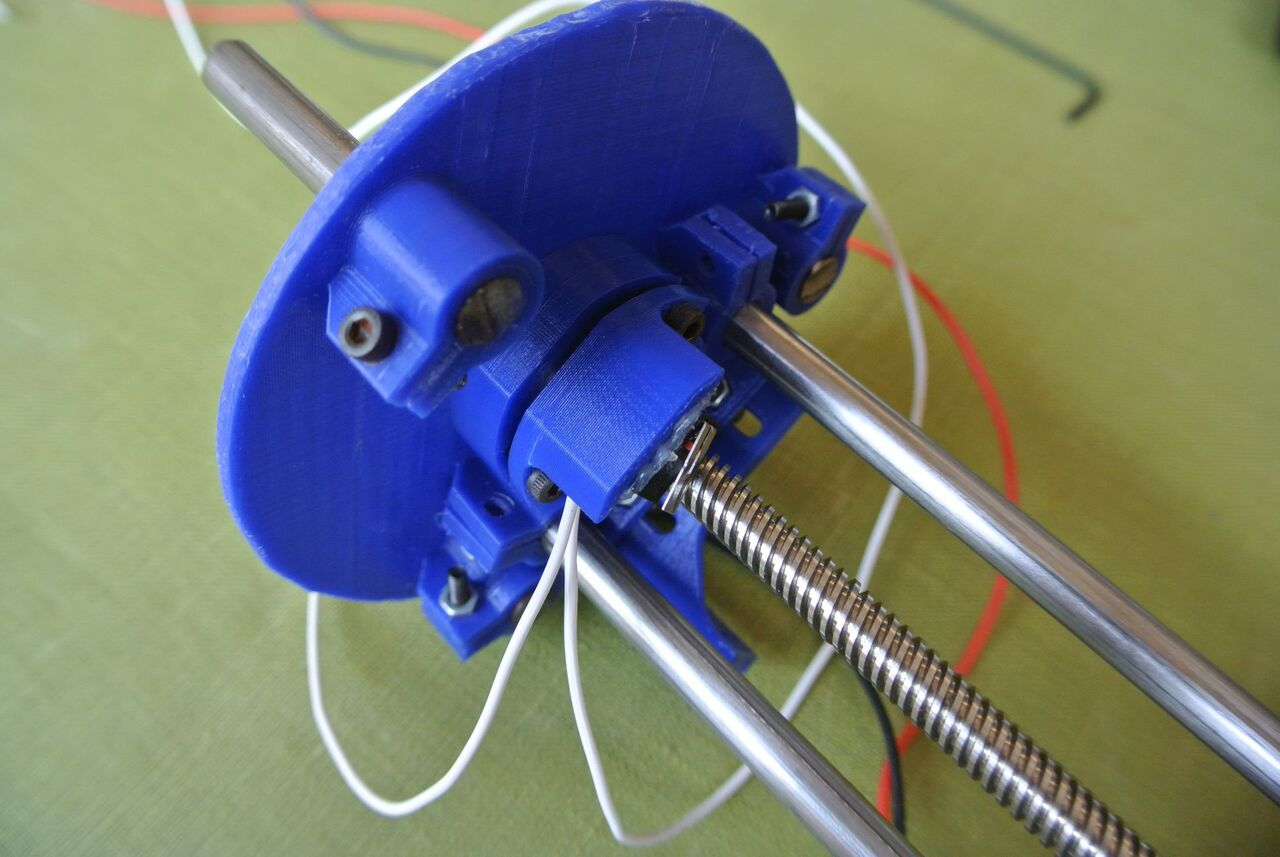
Solder a couple of wires (~1m each) onto the open positions of an micro lever switch. Hot glue this switch to the “Acme_bearing_front” piece, making sure that the hot glue does not interfere with the switch and that the switch can be pressed fully.
Onto the 225mm acme bar, place the “Acme_bearing_front” part, a 608ZZ bearing and the “Acme_bearing_back” piece. Make sure that the back bearing plate is of the correct orientation (the bearing should fit inside it when the three parts are put together)
Slide the pogo header part onto the smooth rods and tighten the smooth rod clamps.
Using 3 M3 20mm bolts and 3 M3 nuts, connect the bearing holder to the pogo header plate. If the orientation of the bearings mounts are incorrect, you will be unable to fit them to the plate.
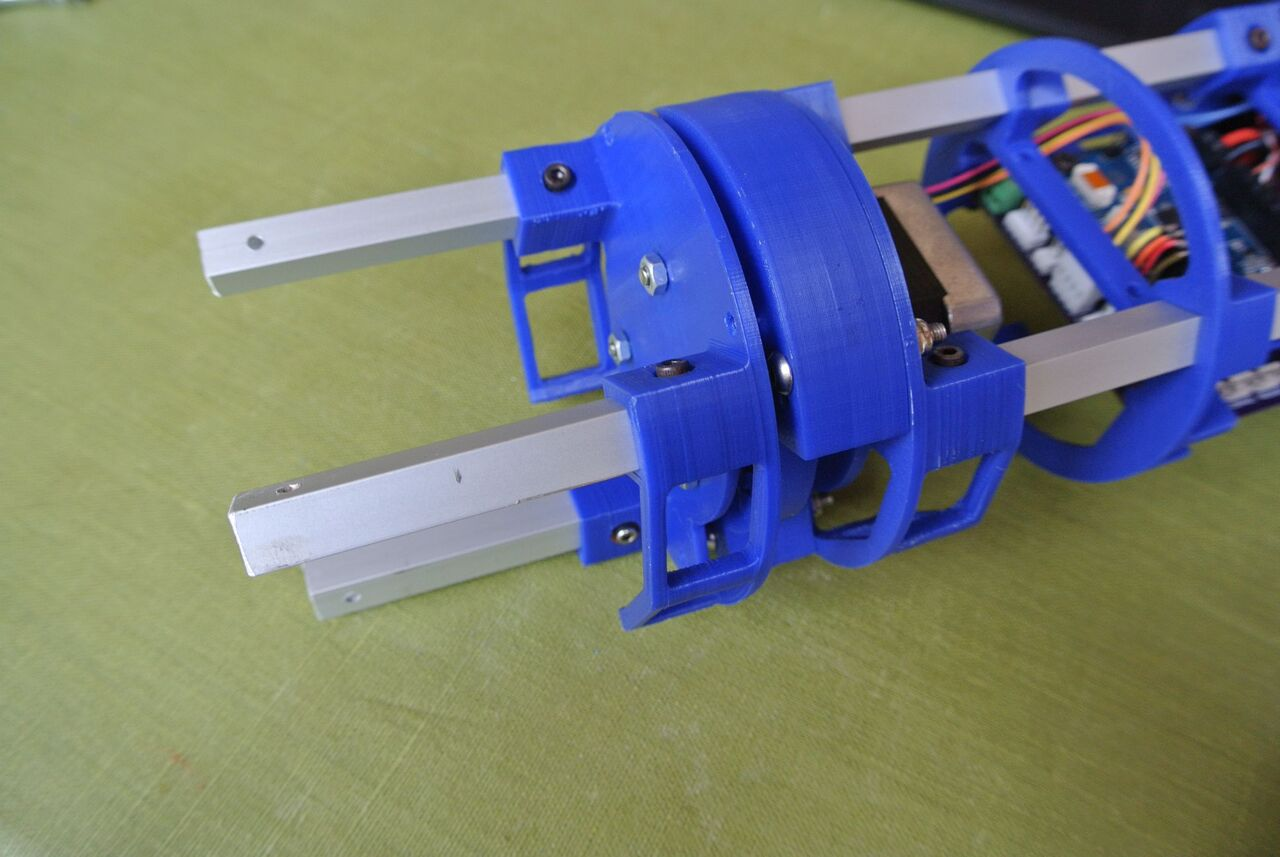
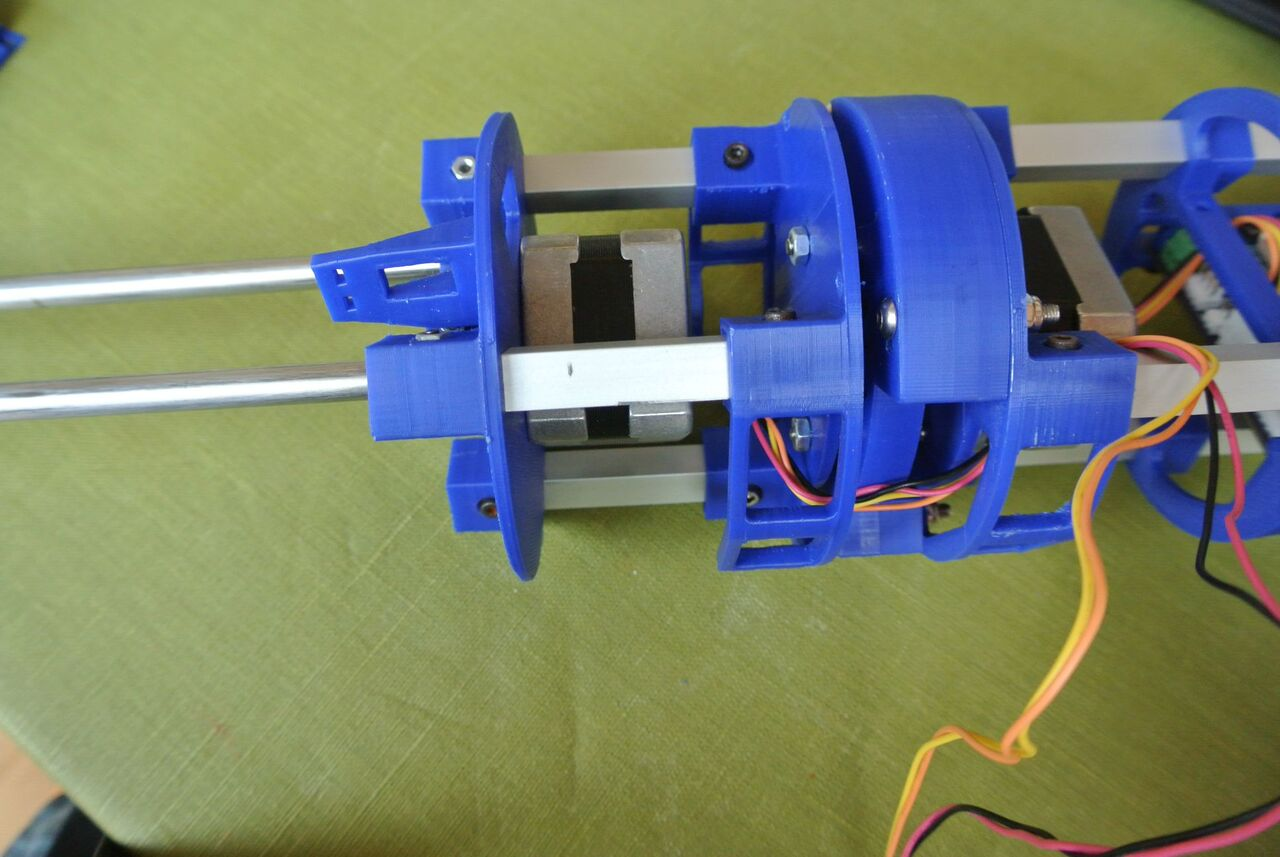
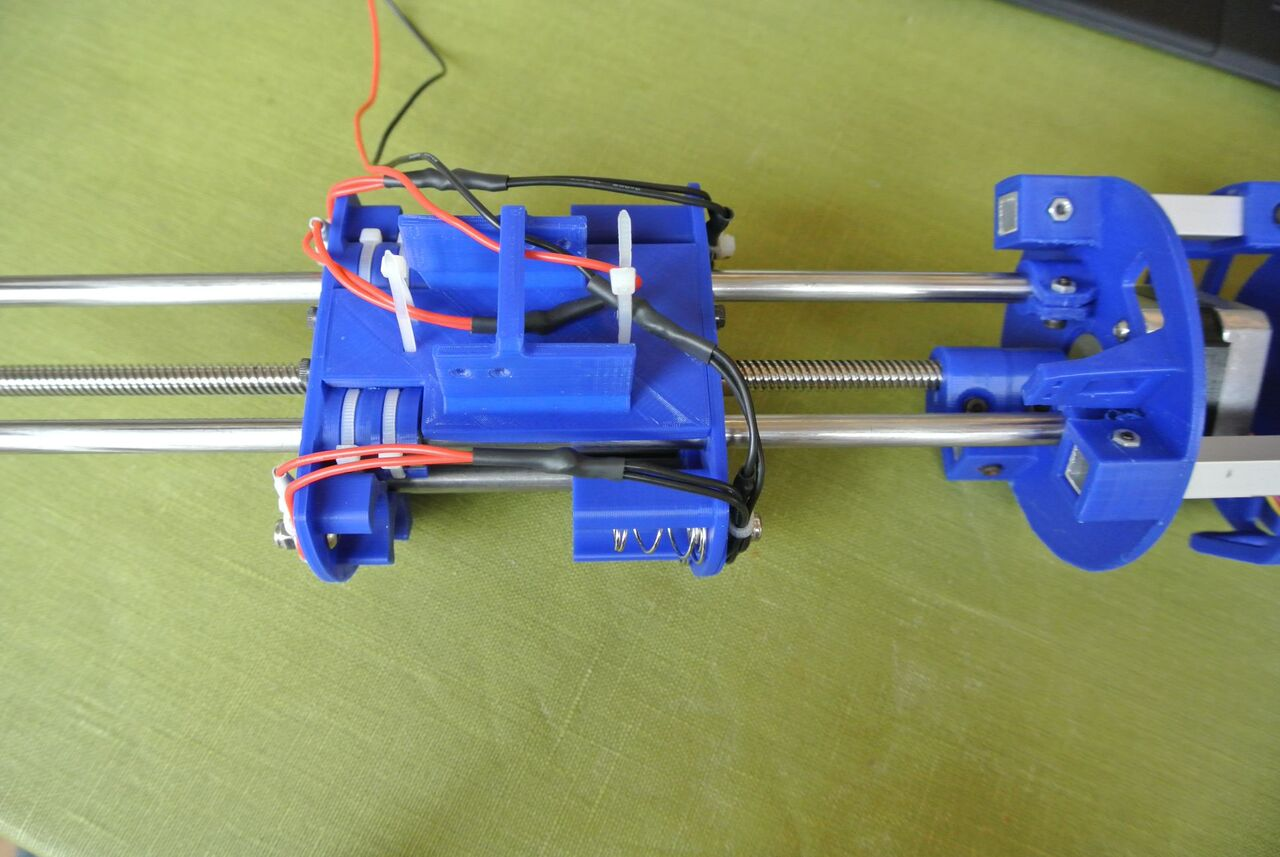
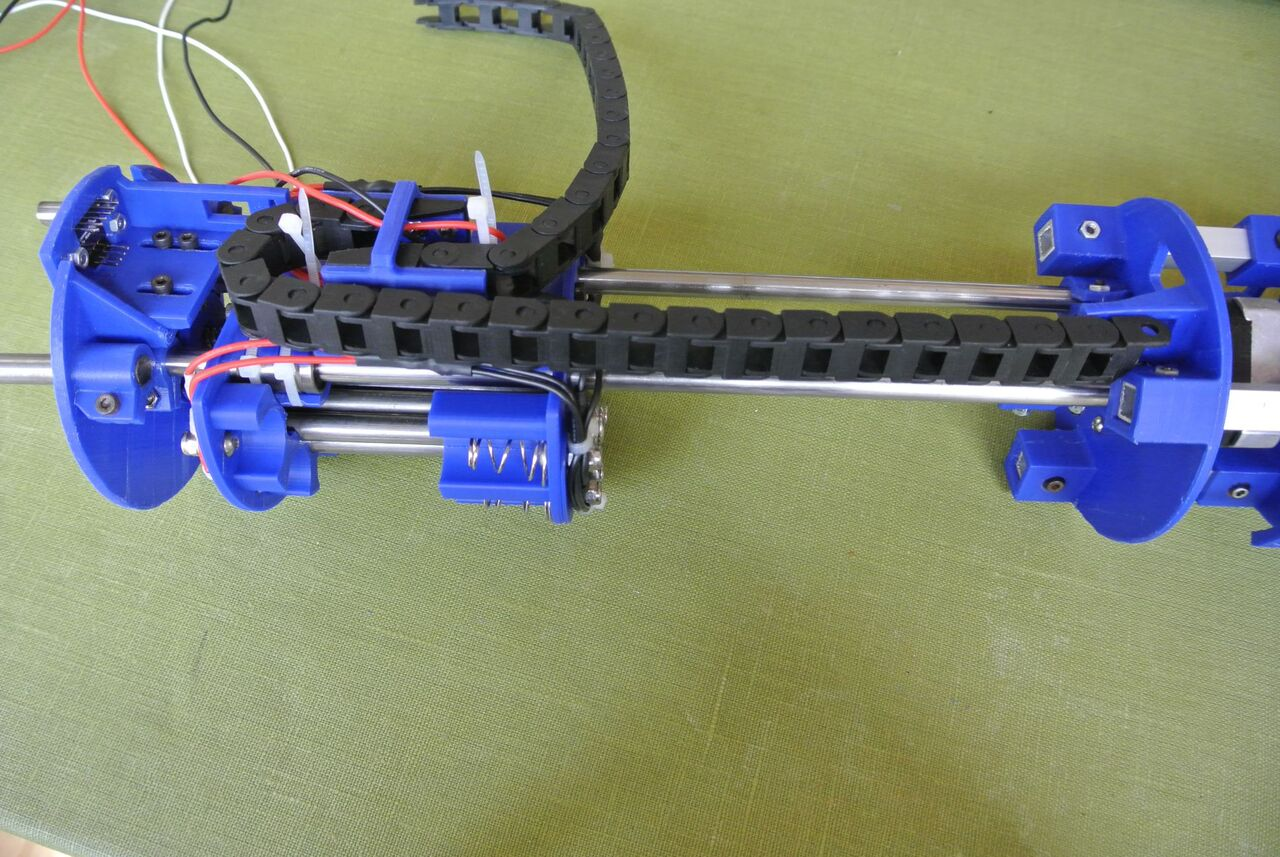
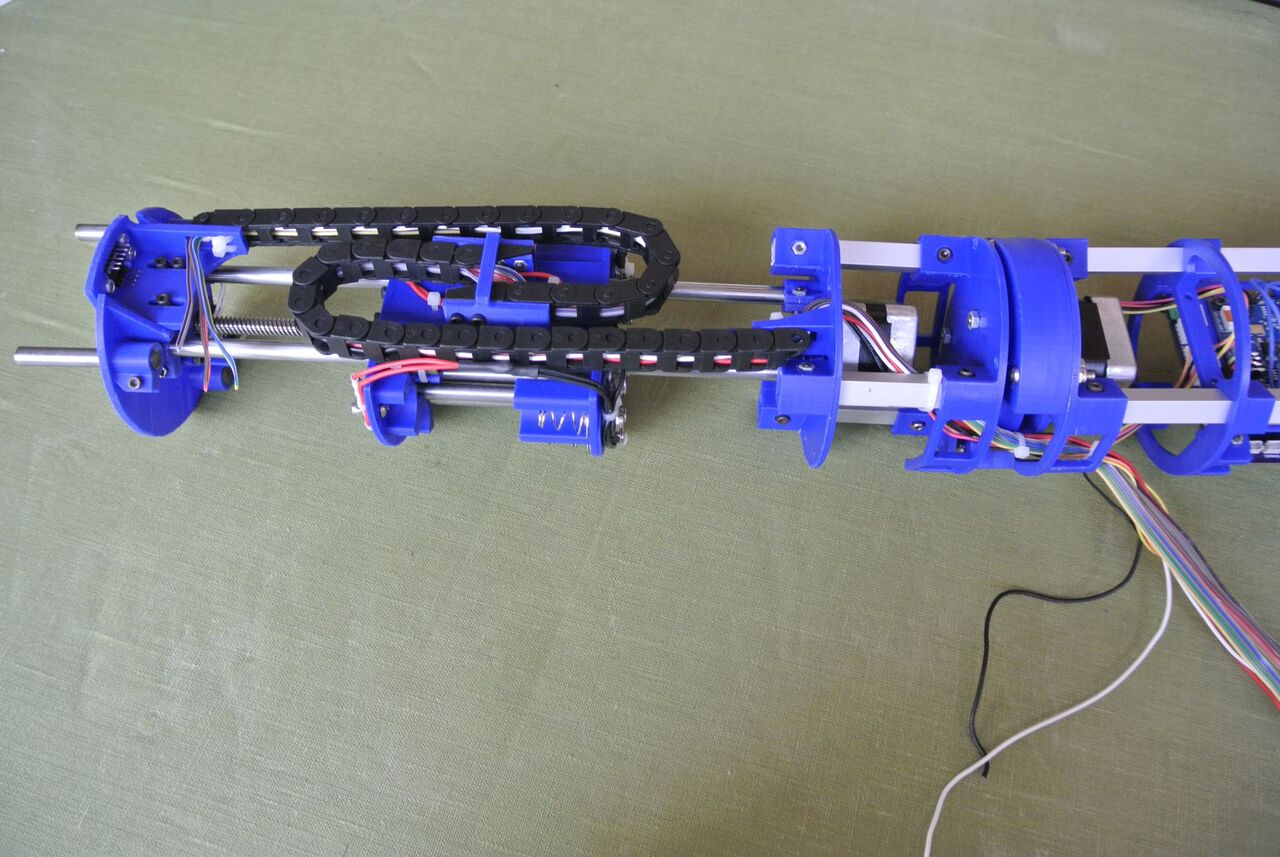
Just a quick overview so far:
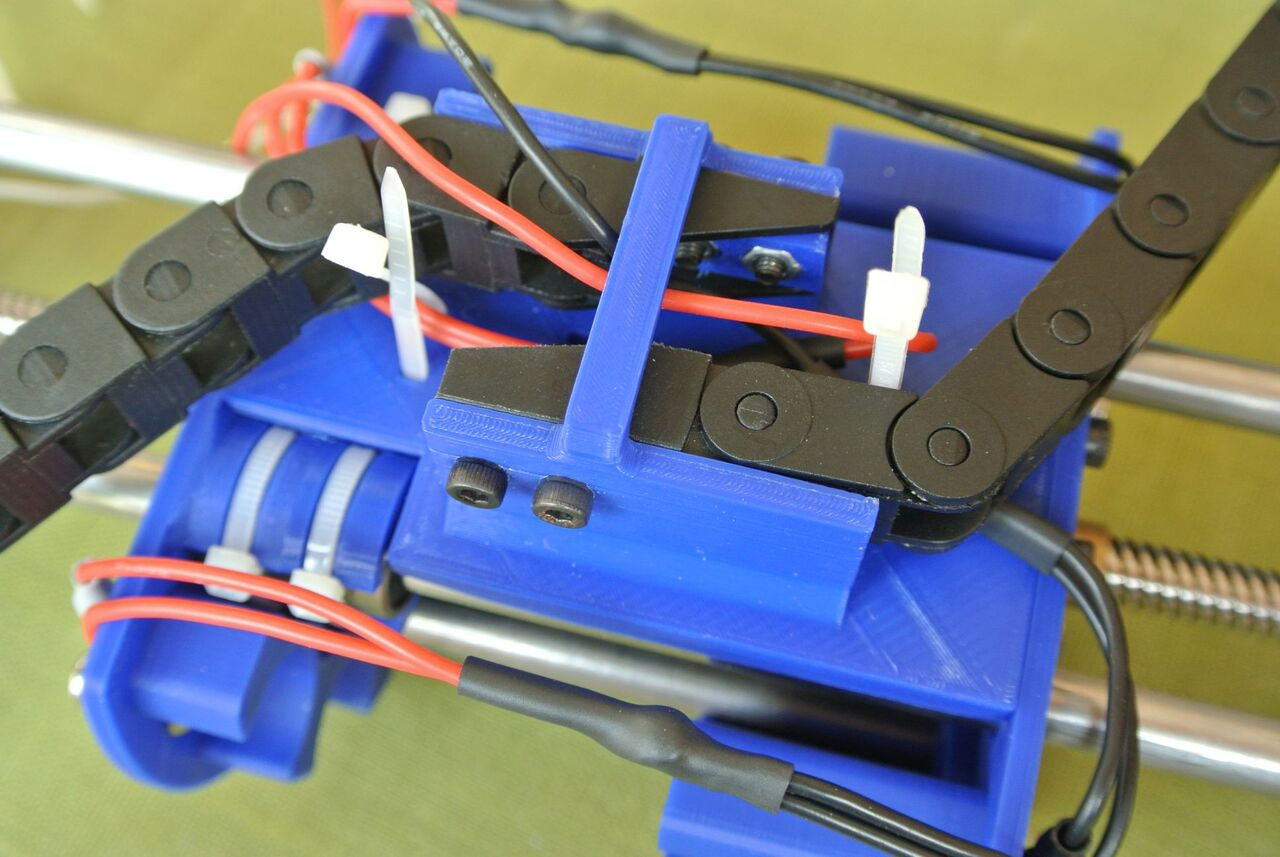
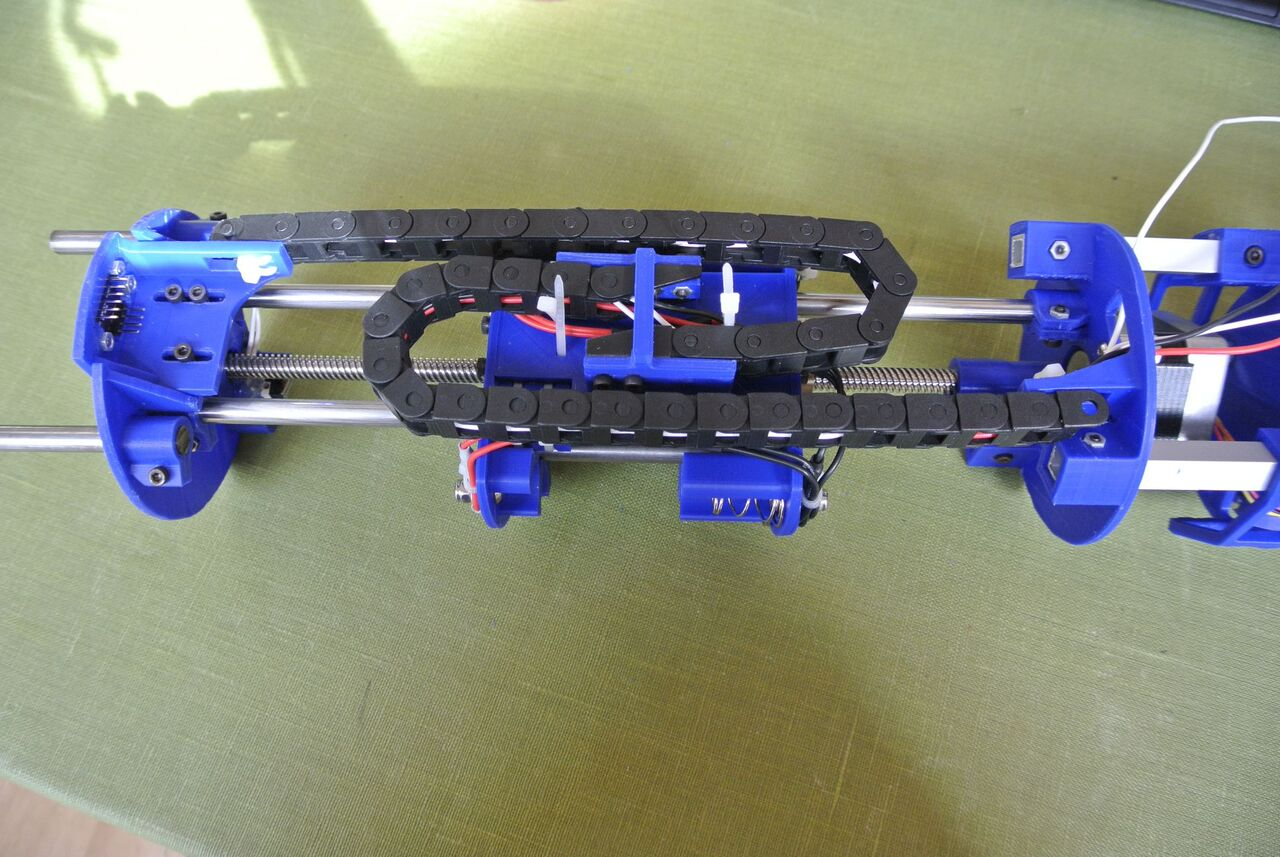
Using 4 M3 10mm bolts and 4 M3 nuts, secure the cable chains in position. Make sure to use the “Cable_chain_nut_holder” to act as a clamp so you can tighten the bolts firmly.
Move the battery assembly assembly to the front position and shorten the cable chain by removing the unrequired links. You will need to cut away at the end link a bit as it will not fit because of the aluminium bar connector.
Repeat the same for the other cable chain. The other cable chain does not need to be cut/trimmed. Zip tie this cable chain to the pogo header part.
Fit the pitch endstop wires through both cable chains. Then take the battery wiring through the back cable chain. Feed all these wires through the hole in the “Pitch_motor_mount” part.
As the 8 wire ribbon cable cannot fit through the cable chains as a single piece, you will need to split the ribbon up. I split mine into 3, 3 and 2 wires, but your ribbon wire may be of a different width so just check the ribbon wire against the cable chains.
Feed the ribbon cabling through both sets of cable chains, one at a time. Leave ~10cm on the front end. This step can be very slow/frustrating.
Zip tie the other cable chain to the “Pitch_motor_mount” part, as shown below. Feed all the wiring through to the electronics section, keeping it all together and neat using zip ties.
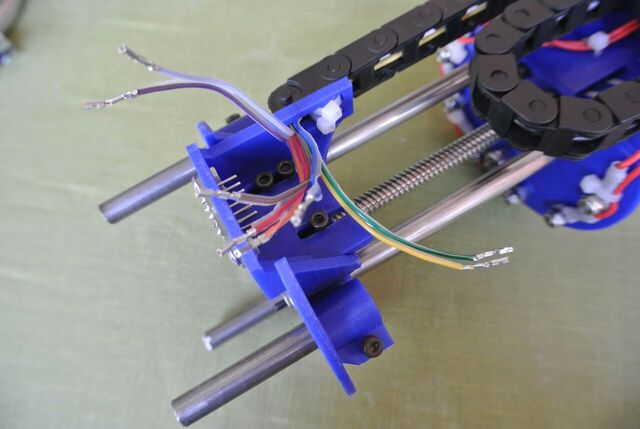
Strip the ends of the ribbon cables and crimp the female 0.1” header contacts onto the wires. Put the crimped wires into 2 2 pin female 0.1” headers and a 4 pin female 0.1” header. Plug the header connectors into the pogo header pins. Put the 4 pin header into the bottom 4 pins. Plug the two 2 in headers into the 6 pin pogo header, one on either end of the header.
Cut the other ends of the ribbon wires so that they are a length of 15cm past the zip tie. Strip the ends of the ribbon wires and crimp the molex KK series female contacts onto the wires. Put 3 2 pin KK series female headers onto the wires dedicated to the endstops. Put a 4 pin KK series female header onto the wires dedicated to the stepper motor, making sure that the sequence of wires is the same as on the pogo header. Plug in the connectors into the corresponding headers on the control board - follow the wiring through to the stepper motors and endstops to make sure that you plug in the correct plug.
-
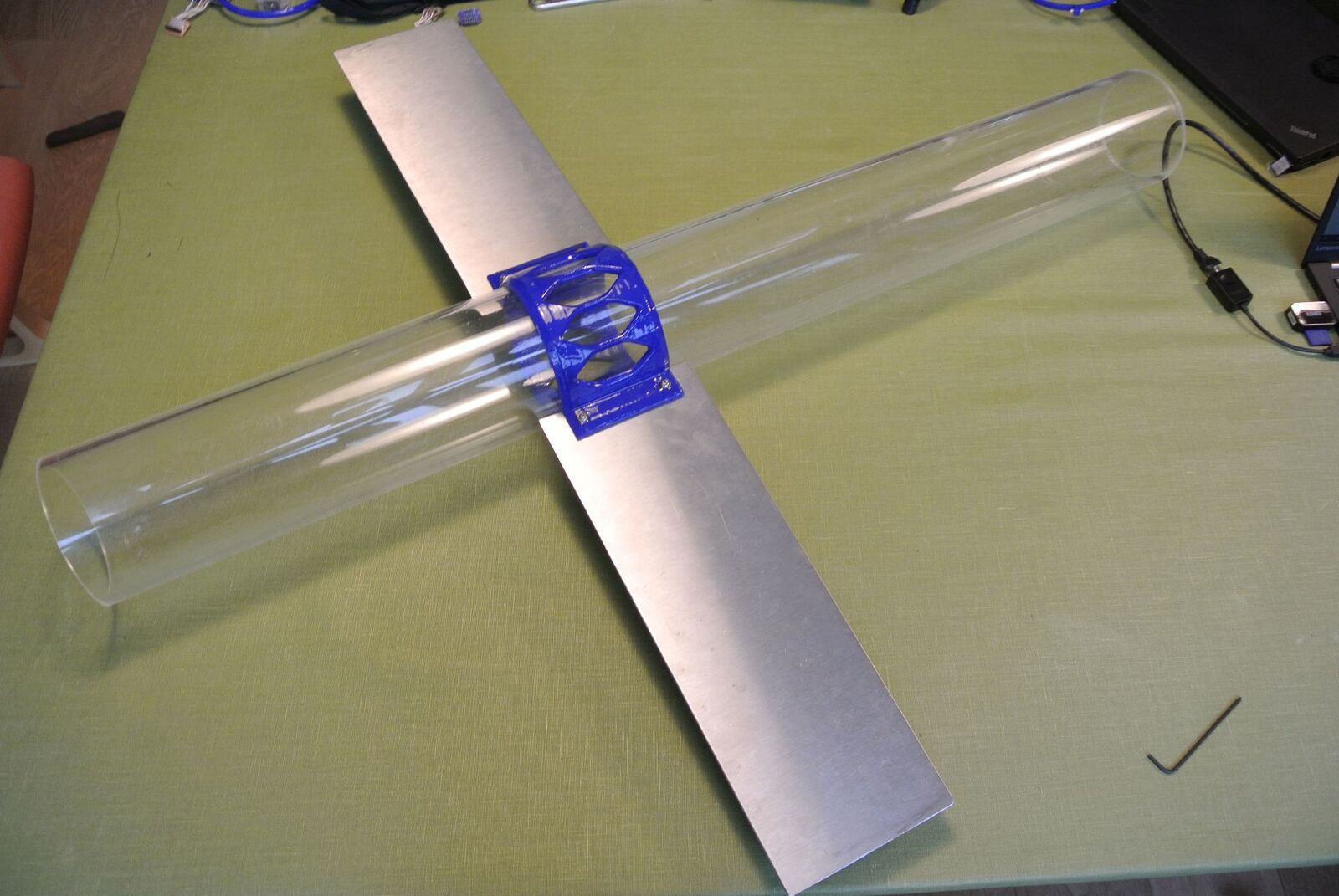
22Glider assembly
Attach the wings to the main tubing using the two resin-coated wing mounts and 4 M3 16mm bolts and 4 M3 nuts.
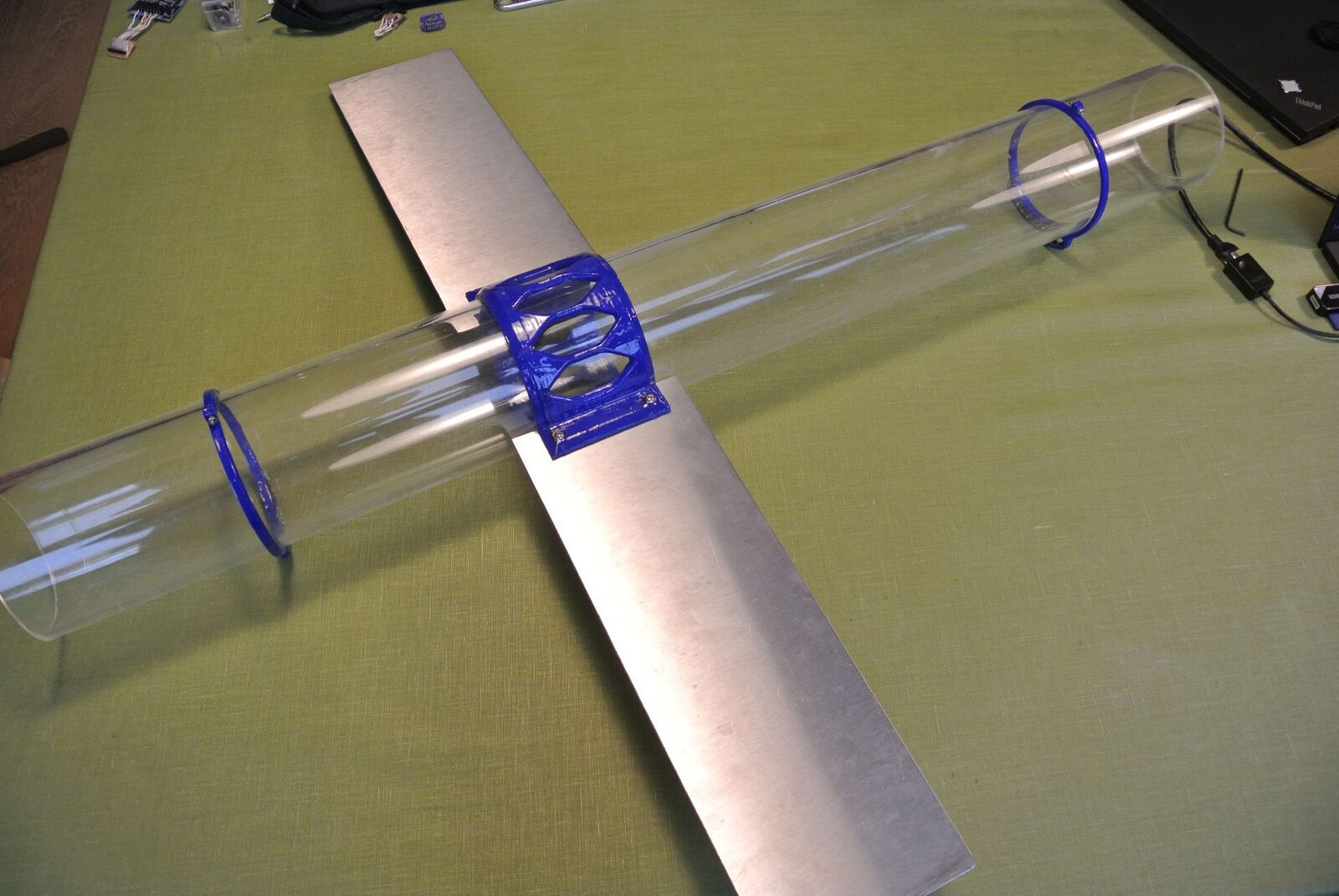
Add the two bar mounts and secure using 2 M3 10mm bolts and 2 M3 nuts.
Turn the glider over and fit the bars on the underside, making sure that they’re roughly level.
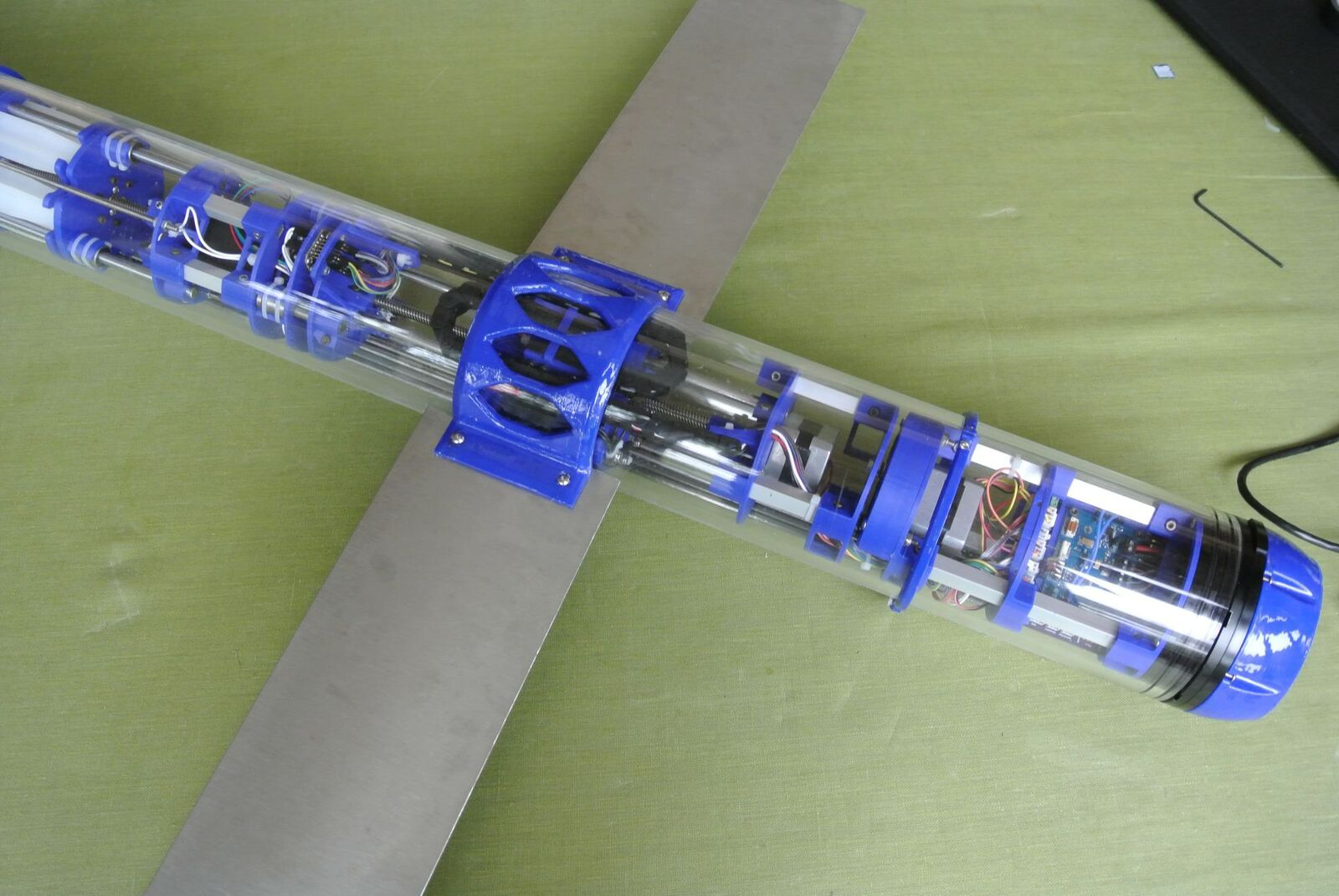
Slide the buoyancy engine into the tubing, making sure that a good seal is formed.
Fit the 6 lithium-ion protected batteries into the battery mounts. Make sure that the batteries are correctly orientated.
Slide the backend of the glider in, making sure that a good seal is formed. The cap to the pressure valve should be removed so that the pressure of the glider is equalised when putting the end in.Make sure that the pogo pins make a good connection, if they are too far apart, loosen the bolts on the pogo board slider and move it accordingly and retighten. Once all the components are fitted, add the pressure valve cap.
-
23Programming the glider
Plug in the charging cable and connect it to the power adapter. Connect the tether cable to the Fathom-S topside board and connect the topside board to you computer. Download the latest demo code from either the glider’s GitHub repository or from the “Files” section on the glider’s Hackaday page. Upload the code to the glider using Arduino, the Fathom-S makes the control board come up as a standard serial connection. Make sure that the board selected is “MEGA 2560”.
If any of the stepper motors move in the opposite direction to intended, switch the connections over in the female KK series headers.
-
24Calibration
Upload the “Calibration” program, found in the glider’s GitHub repository or from the “Files” section on the glider’s Hackaday page. When this is run with the glider underwater, it should expel all air within the buoyancy engine and then fill the buoyancy engine to 50% capacity. At this point the glider should be neutrally buoyant. Hopefully the rods on the underside of the glider should be too long and will cause the glider to sink. Cut the ends off of the underside steel ballast rods in small increments until the glider is neutrally buoyant.
If the glider is noticeably nose heavy when trimming the mass of the glider, slide the underside steel rods/wings backwards. (move the rods/wings forward if the glider is noticeably tail heavy).
-
25Finish
You now have a fully assembled underwater glider prototype.
OSUG: Open-Source Underwater Glider
A versatile autonomous environmental drone using a buoyancy engine




















Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
ummm... why on gods greeen earth would you take 5 pressure fittings designed, to be threaded into things and hold pressure, and glue them into the aluminum plate??? seriously great job on the project but i can see many small things like this that show you have not any experience in actual industry.
the barbed 3/4 bspt hose nipples are designed to hold over 100 bar at the thread. you have actually chosen high pressure fittings and could have used much less heavy duty ones for your application. and the thread on the end of them is designed to be threaded into things. just a tip.
Are you sure? yes | no
I was a high school kid at the time lol. Very much agree, the general principles of the glider are okay, but the whole thing could be redesigned from the ground up and pretty much everything could be improved. (CAN control topology for the controls side, properly rated hydraulic pump, etc. etc.)
Are you sure? yes | no
Only the link for the PCB assembly. The Instructions for the body assembly seem disappear.
Are you sure? yes | no
Yeah, the body assembly that was up was for the first generation. I'm currently overhauling all of the instructions to update them to the third generation hardware. The Hackaday instructions editor is rather buggy (making editing slow) and I'm rather time busy at the moment, but I hope to have the new instructions up soon.
Are you sure? yes | no