Sergei V. Bogdanov
Sergei V. Bogdanov-
New Stepping Algorithm - It Can Go Now!
05/06/2018 at 18:50 • 0 commentsWe change the algorythm of stepping, so that the center of mass is between the foots, and nowe RoboAmbler can walk almost without hamble.
-
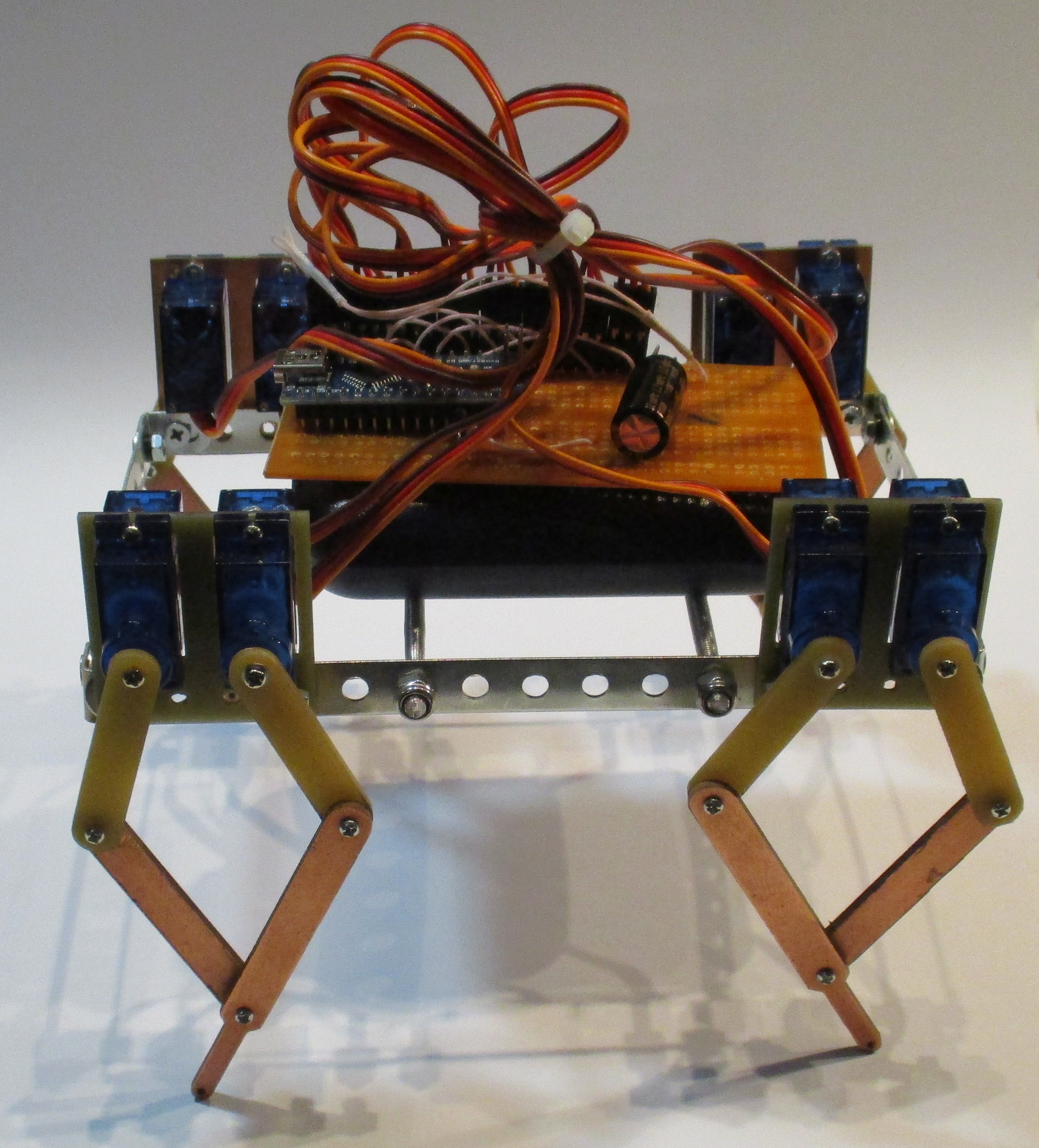
The first Walking test
05/01/2018 at 00:40 • 5 commentsWe assemble the model and try to start the walking using powerbank.
![]()
It can walk, but it walk with a limp now. We are to calculate more precise algorythm of leg changing to avoid a limp.
-
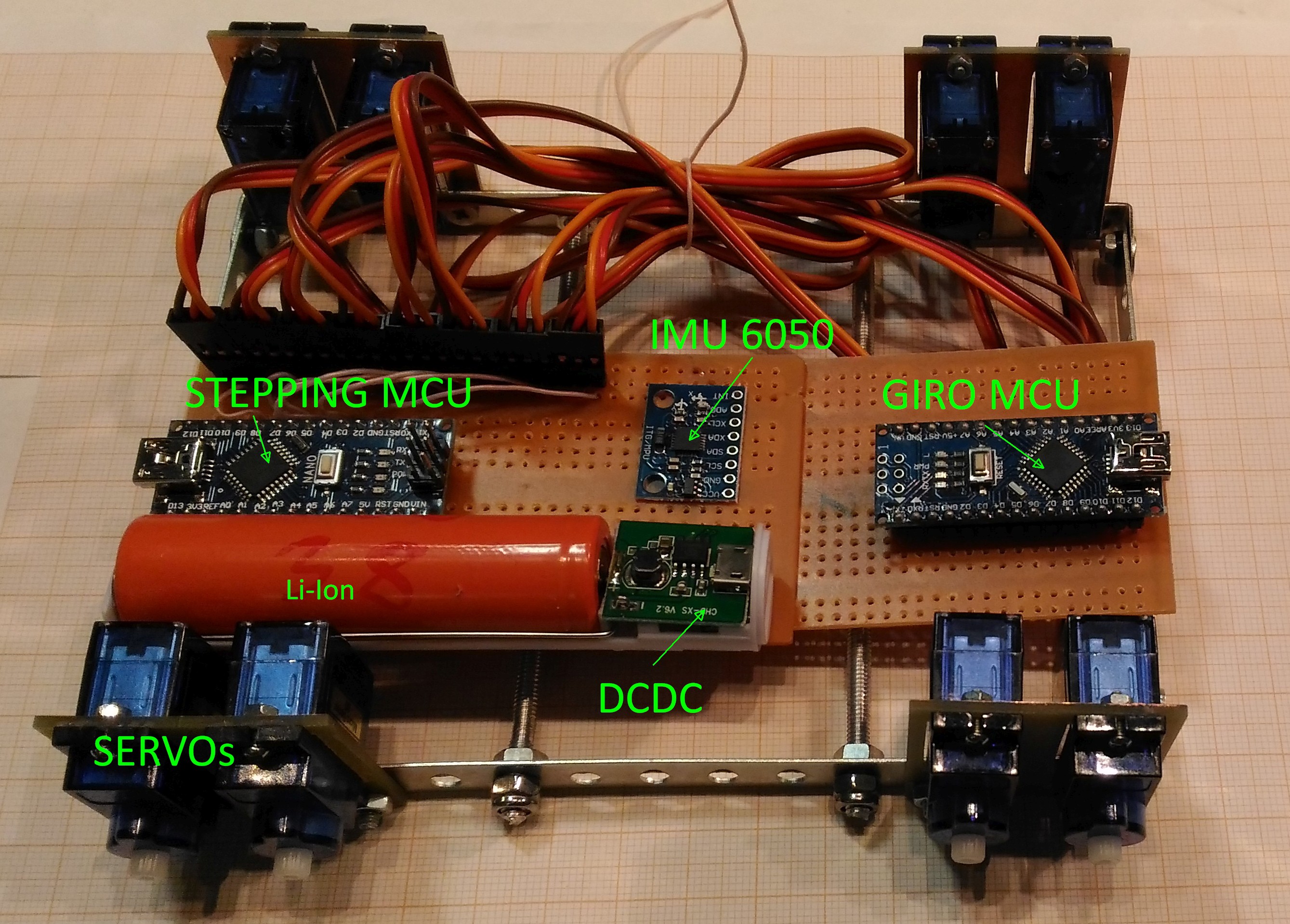
Installing Arduino PCBs and IMU
09/23/2017 at 19:16 • 0 commentsWe install Arduino Nano for Stepping conrol, MCU for IMU data calculation, and IMU imu 6050 invensense. We use Li-ion battery and DCDC converter to get 5 V from 3.7 -4.1 V from Li-ion.
![]()
-
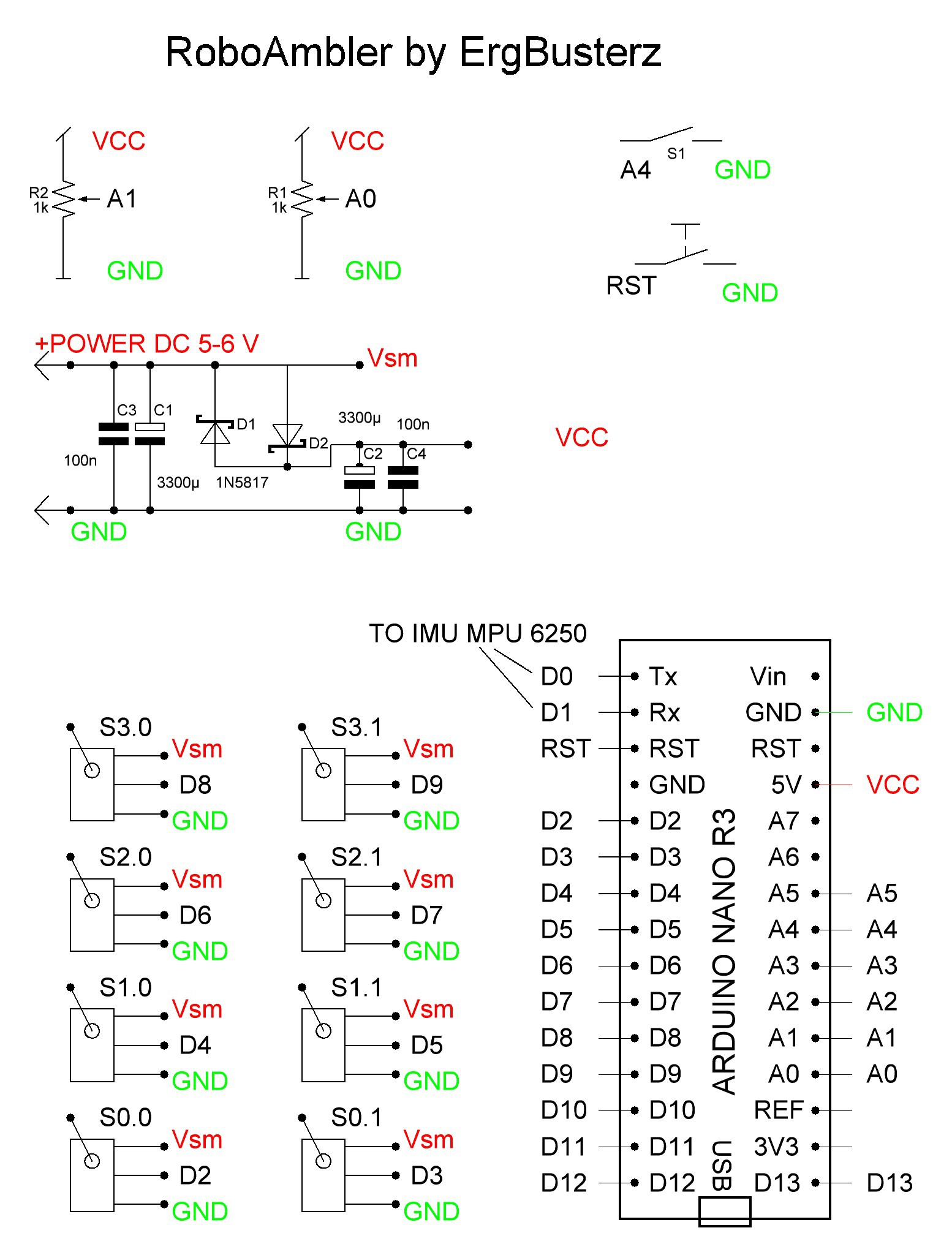
Base schematics are finished
09/17/2017 at 15:27 • 0 commentsHere is base schematics
![]()
-
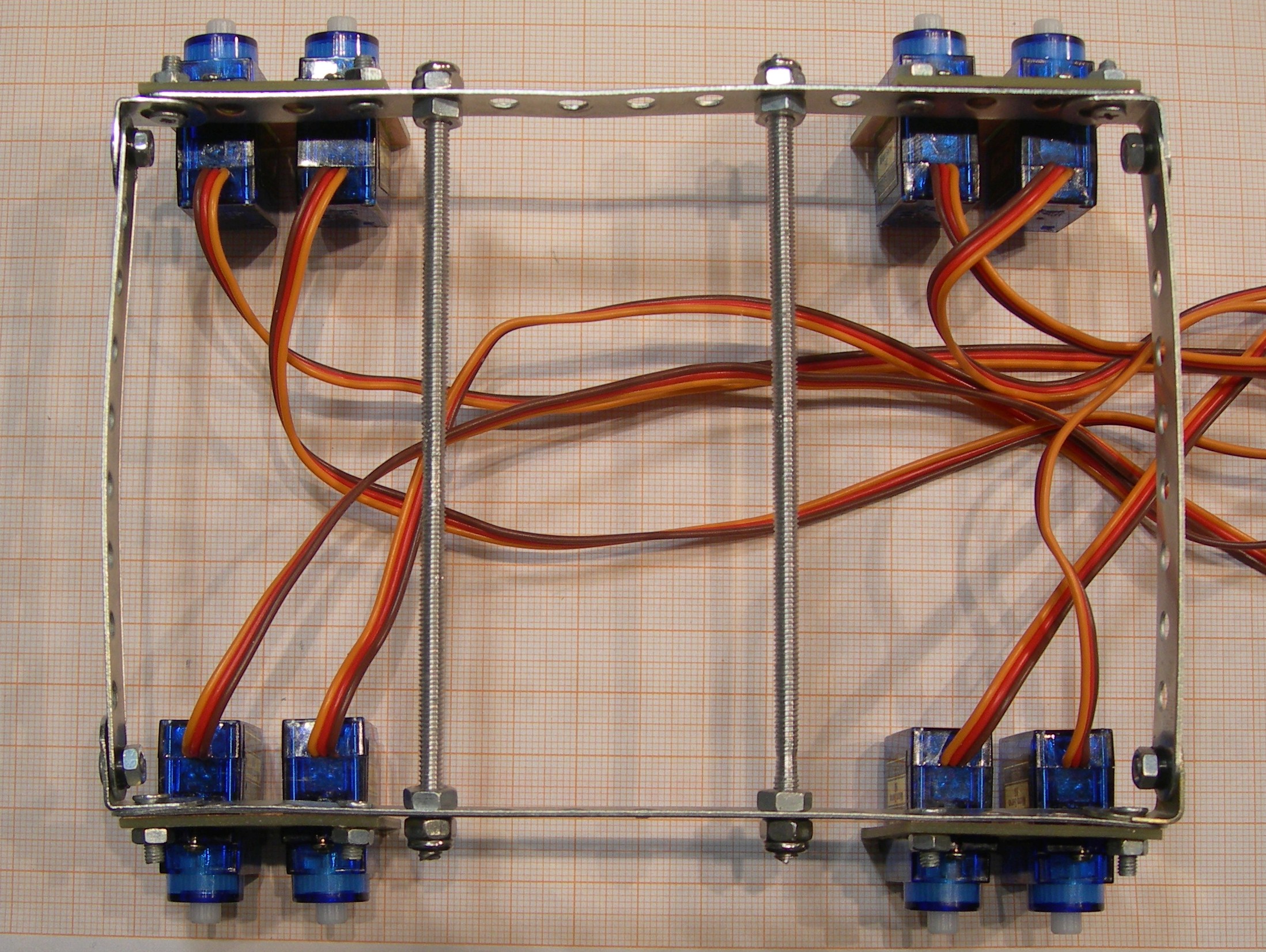
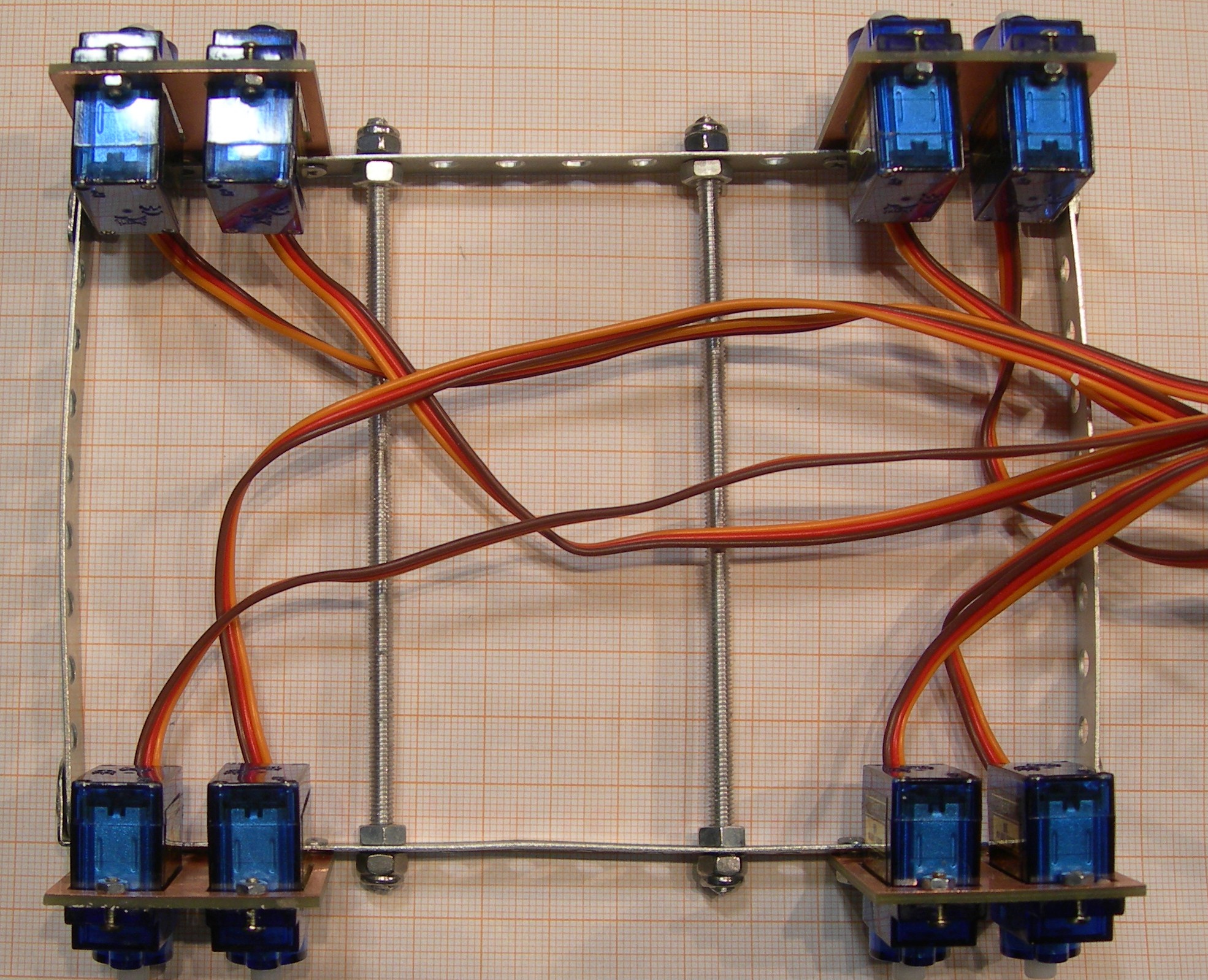
RoboAmbler - making the Base
09/16/2017 at 20:33 • 0 commentsWe use 8 Tower S90 g servos, Servo Holders and metal construction set. We connect it together in a base. Bottom, profile and face views
![]()
![]()
![]()
RoboAmbler Walking Base
RoboAmbler is simpe open source stepping quadruped Robot walking base with 5-bar linkages