deʃhipu
deʃhipu-
Robot Fusion
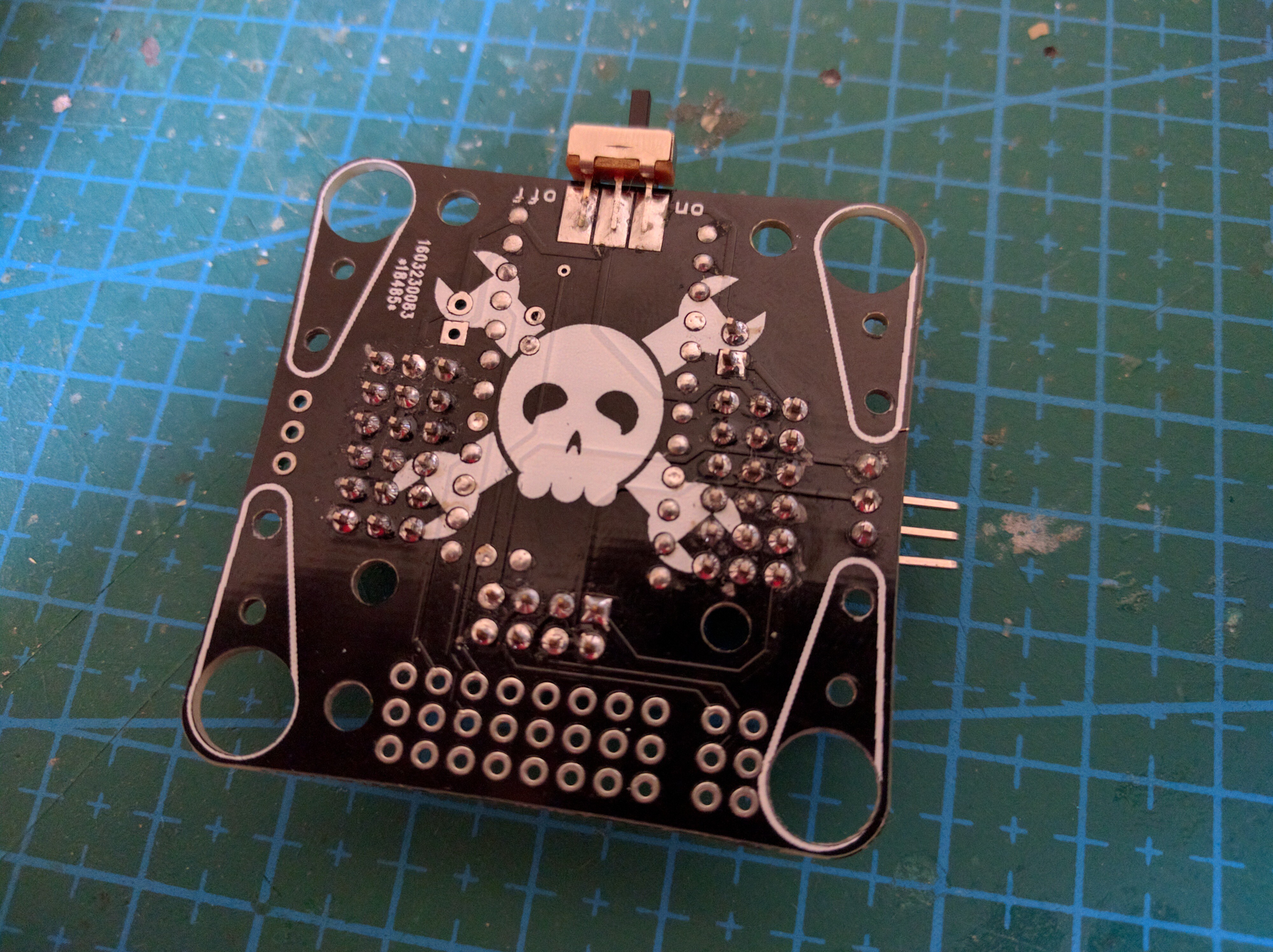
11/06/2016 at 10:38 • 0 commentsSo I never actually made that board from the last log. But remember #Tote HaD, those robots that we have built at Hackaday Belgrade? I have spent a considerable amount of time designing that PCB, and it has a couple of Easter eggs in there. On of them is that unpopulated pin header in the lower right corner:
![]()
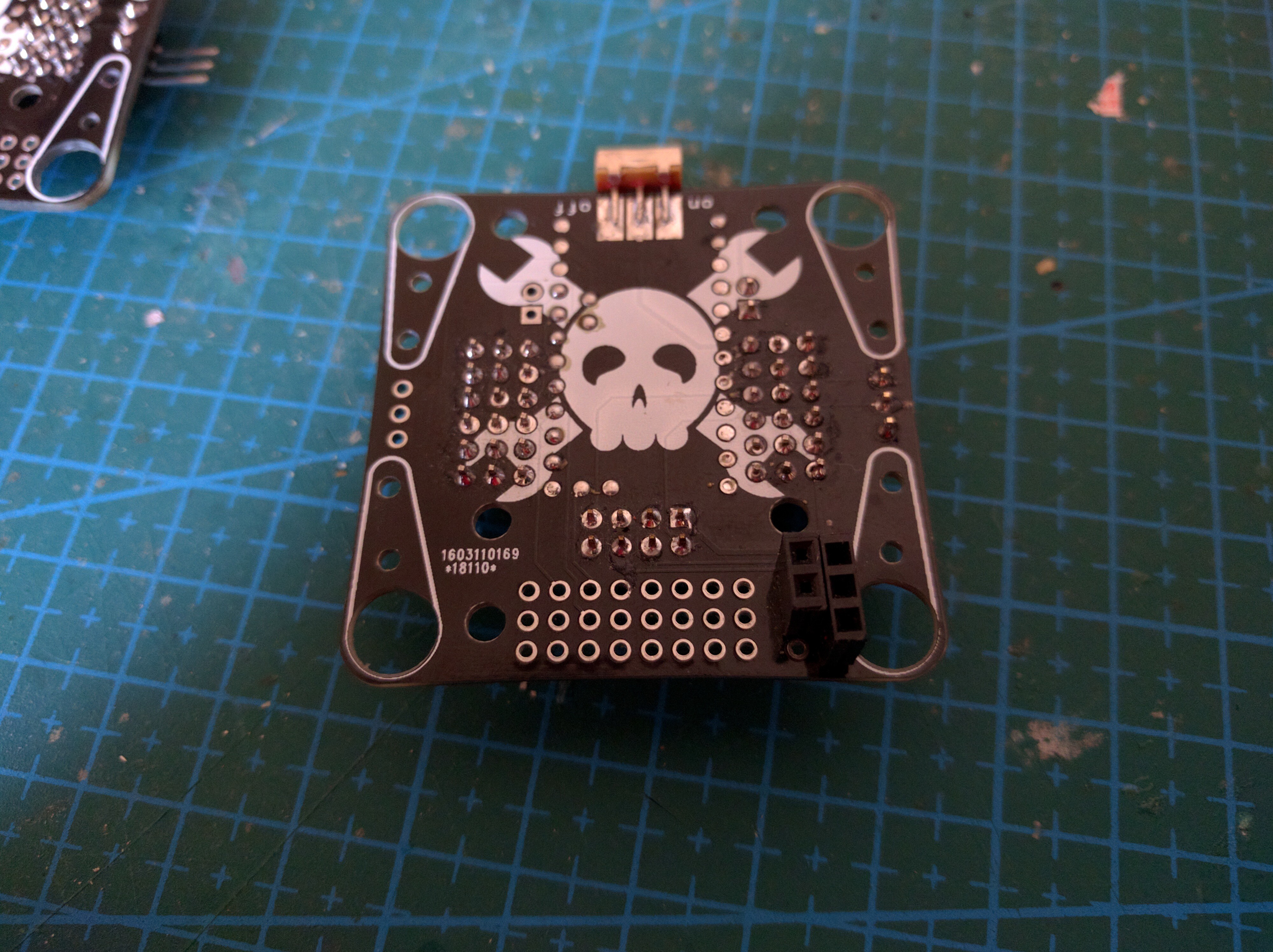
Turns out that you can put a female pin header in there:
![]()
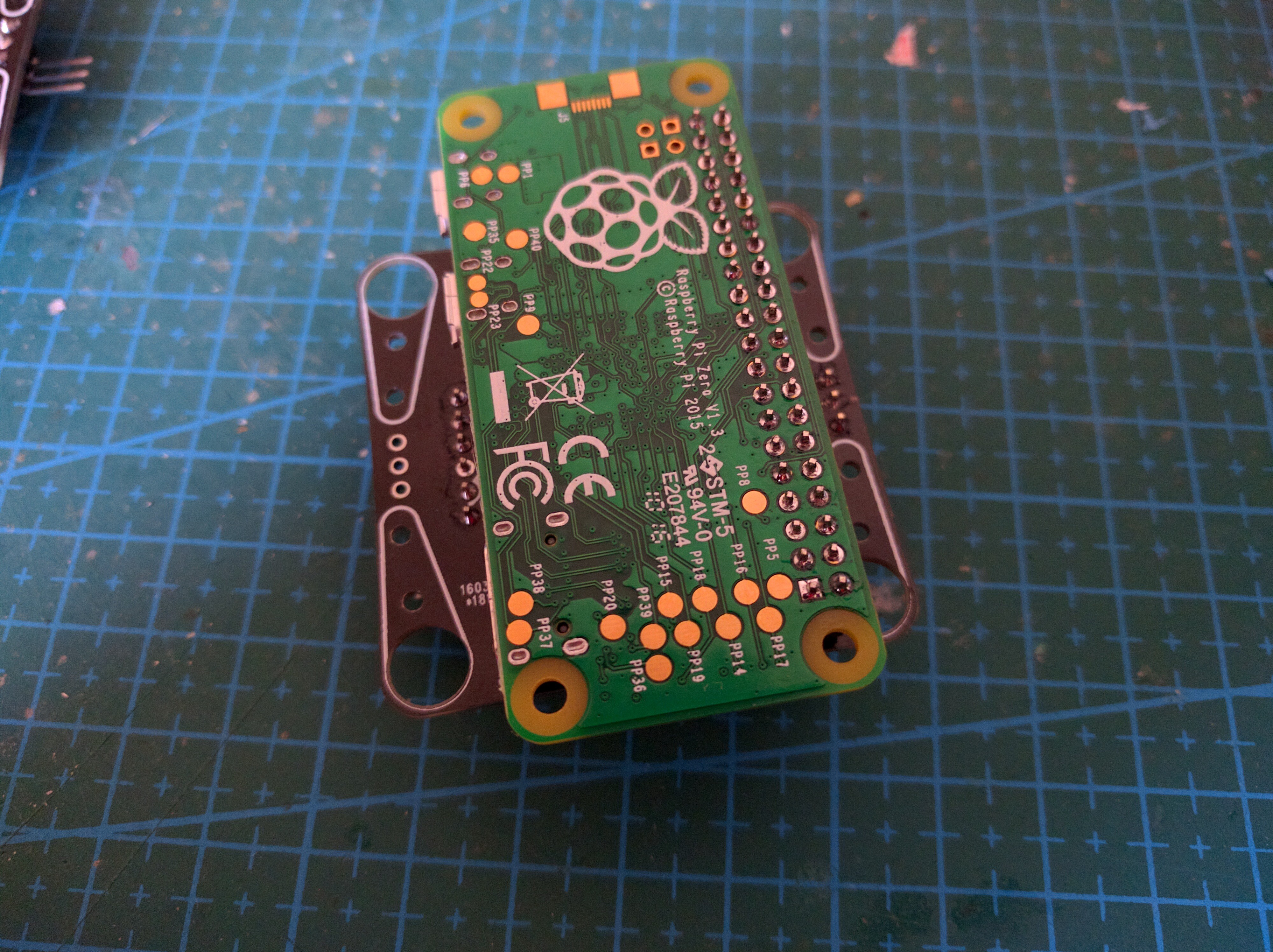
And then, instead of plugging that ESP8266 module in the usual socket, you can plug a Raspberry Pi Zero in there:
![]()
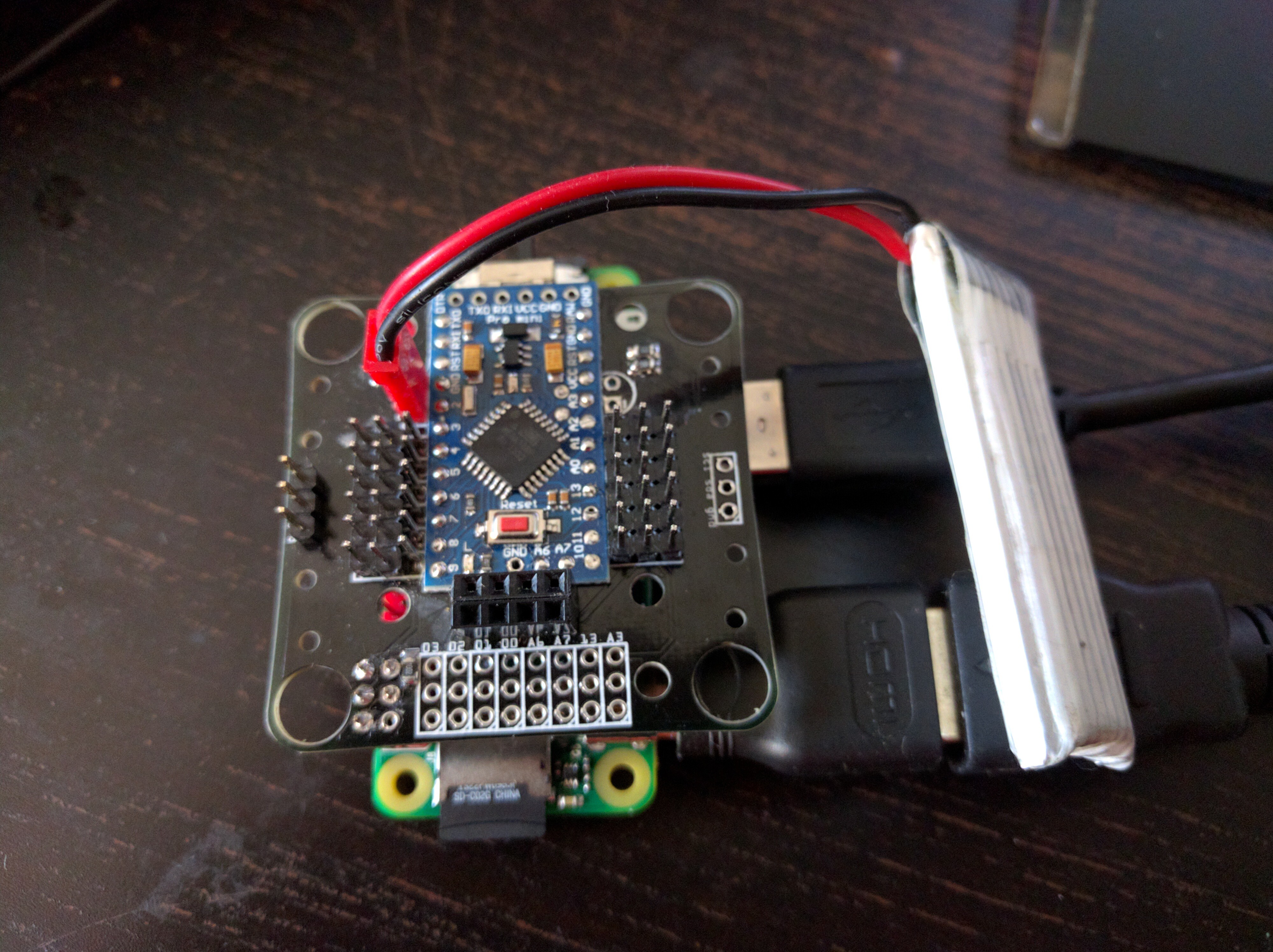
The power from the LiPo is only between 3.7 and 4.2V, but turns out that this is enough for the pi -- its regulator will switch into a low-voltage mode, and everything works:
![]()
Next, I will just need to take the MicroPython code I used on the original, and touch it up to run on regular Python on the pi, with the SMBus library for the I²C communication.
-
Everything in One?
02/11/2016 at 12:38 • 0 commentso I haven't done much work on this during the week, but I did do some thinking, and the results of that are pretty scary. First, I realized that using Servo Blaster and all those pins is not really that convenient, when I can simply have a #Servo Controller from a Pro Mini. Second, while Pi Zero is cheap, a WiFi dongle and SD Card for them are not. ESP8266 is cheap, though, and you can do #RPi WiFi with it. Can't really do much about the SD Card, apart from using a cheap, small one.
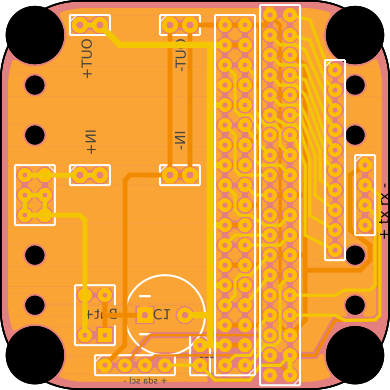
Anyways, putting it all together, I got something like this:
![]()
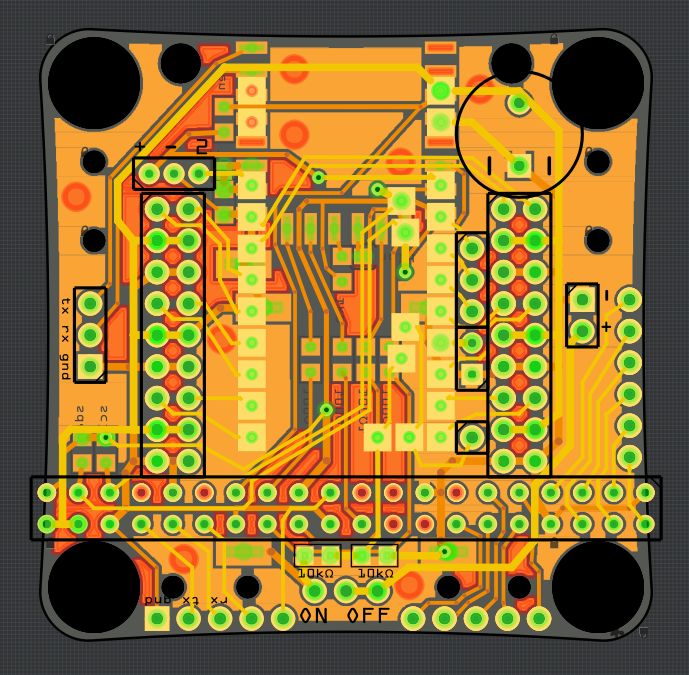
It has room for ESP8266, Pro Mini and Pi Zero, 12 servo sockets, IR sensor socket, and a voltage regulator module. I had to use both sides of the PCB with surface pads, and the RPi header doesn't quite fit on the 5cm board, but that's details.
How would you use this? There are three options. Only put a Pro Mini there, and you have the simple version of #Tote with remote control. Add a ESP8266 with the right firmware, talking to the Pro Mini over I²C, and you have a Micropython or Lua-based robot with WiFi. Finally, add a voltage regulator and Pi Zero, and you have a perambulating computer, with WiFi over ESP8266 and possibly a USB camera.
Will this work? I honestly have no idea. I cobbled this PCB together over several evenings, stealing ideas that I don't fully understand all over Hackaday. It does, however, sound like the right way forward.
-
Face
02/07/2016 at 20:25 • 0 commentsI also needed to figure out a way to attach the camera to the robot in a robust way. So I drilled some holes in the plastic that holds it, and screwed that to the Pi Zero:
![]()
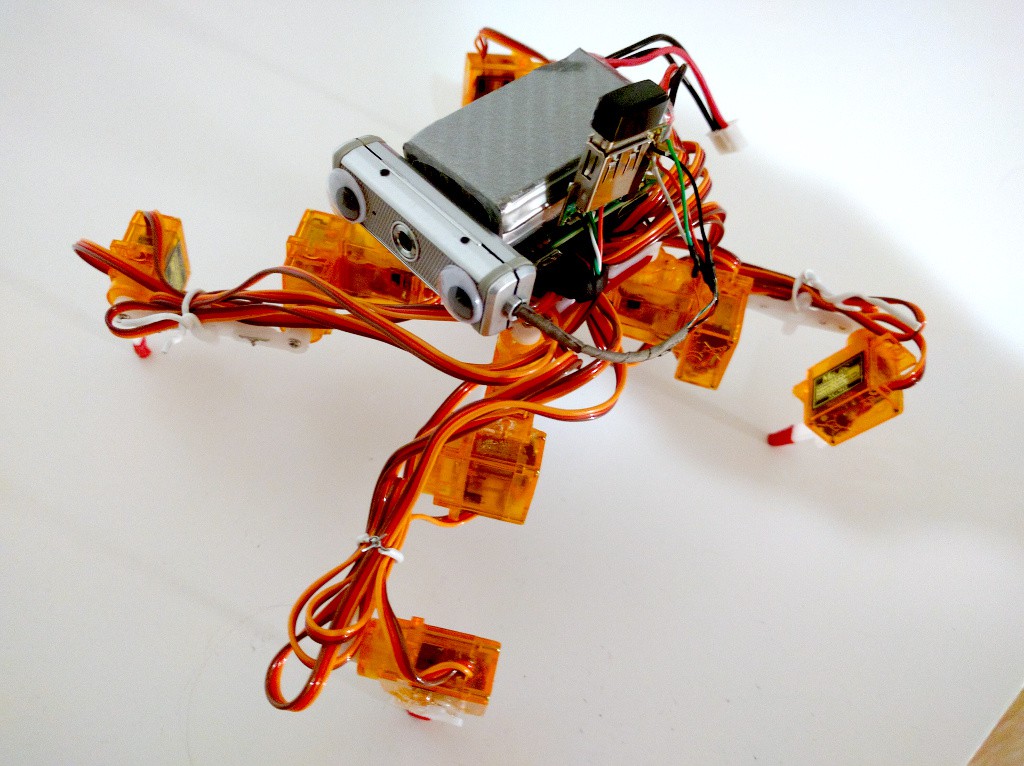
This is with just the camera connected to the USB. But for development it's nice to have both the camera and WiFi, so I repurposed that two-port hub I had, and made an alternate cable:
![]()
Of course googly eyes are very important too!
-
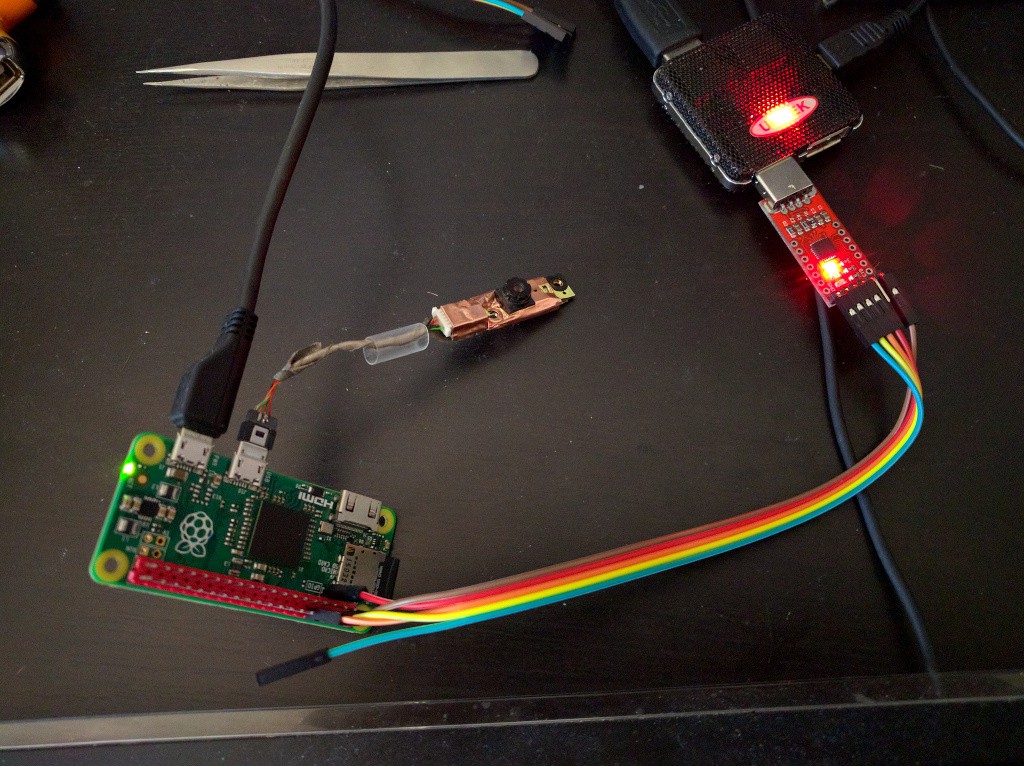
Camera
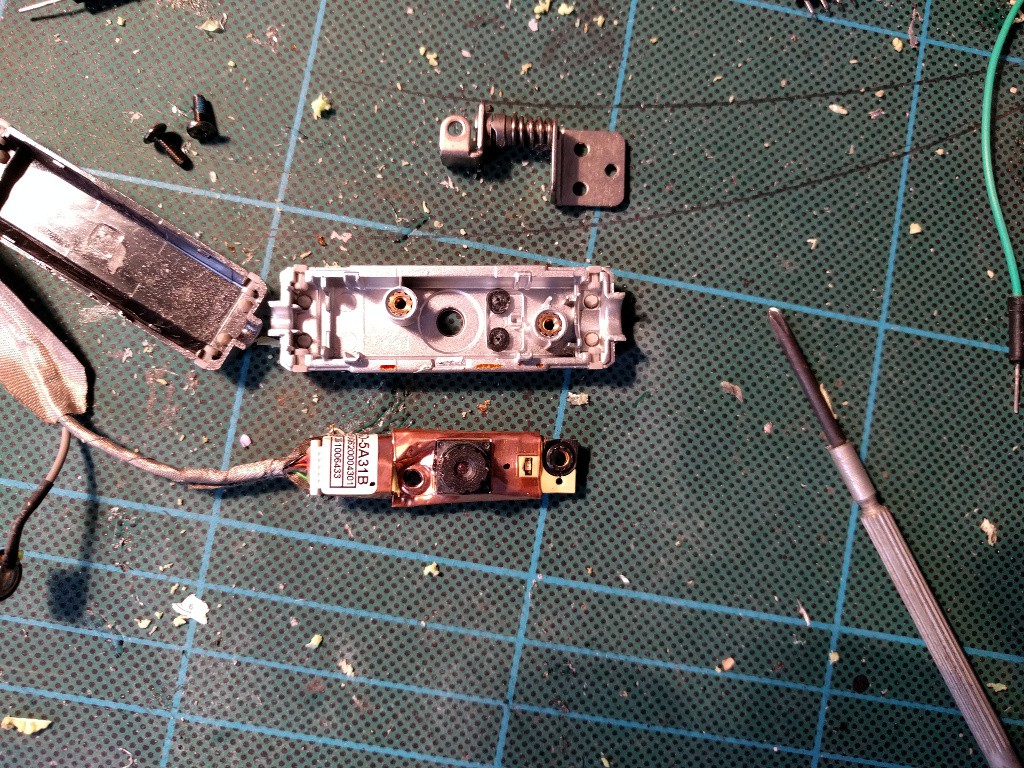
02/07/2016 at 13:40 • 0 commentsToday I worked a little bit on adding a camera to Tote Zero. Most of this I have already done for #Pico-Kubik quadruped robot, but I thought I will do a more detailed write-up. I started by digging up from my junk pile an old camera module from a laptop. You can usually find those in electronic junk, or, failing that, buy them as spare parts for a dollar or two. Mine looked something like this:
![]()
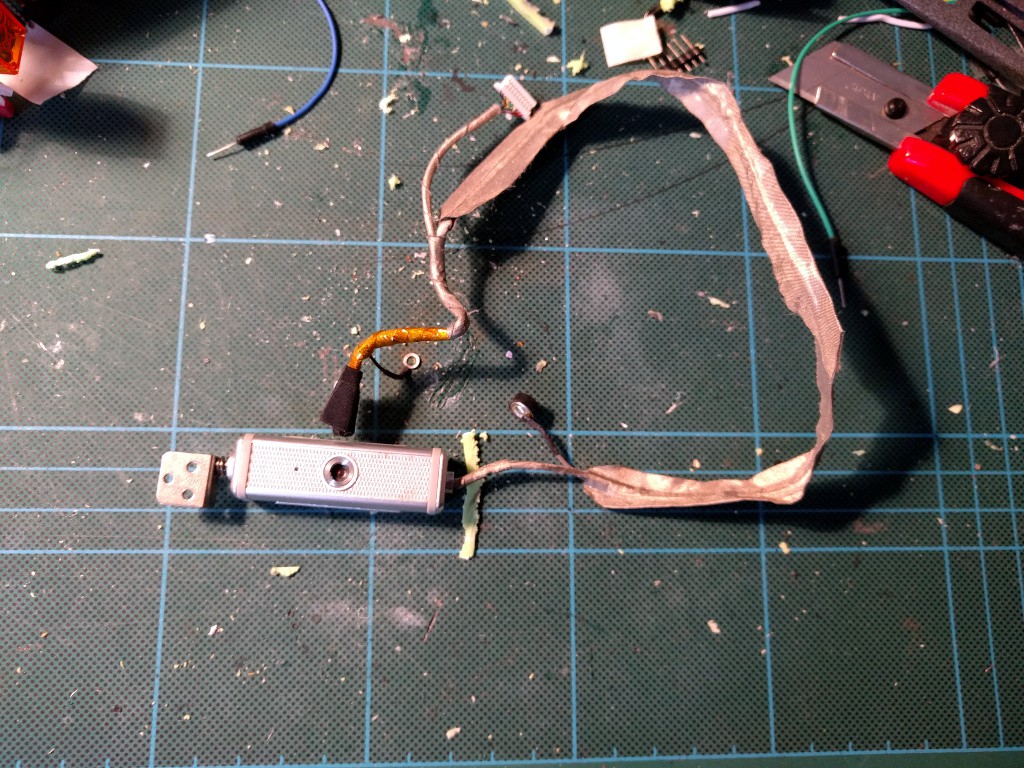
Next I opened it and extracted the actual sensor:
![]()
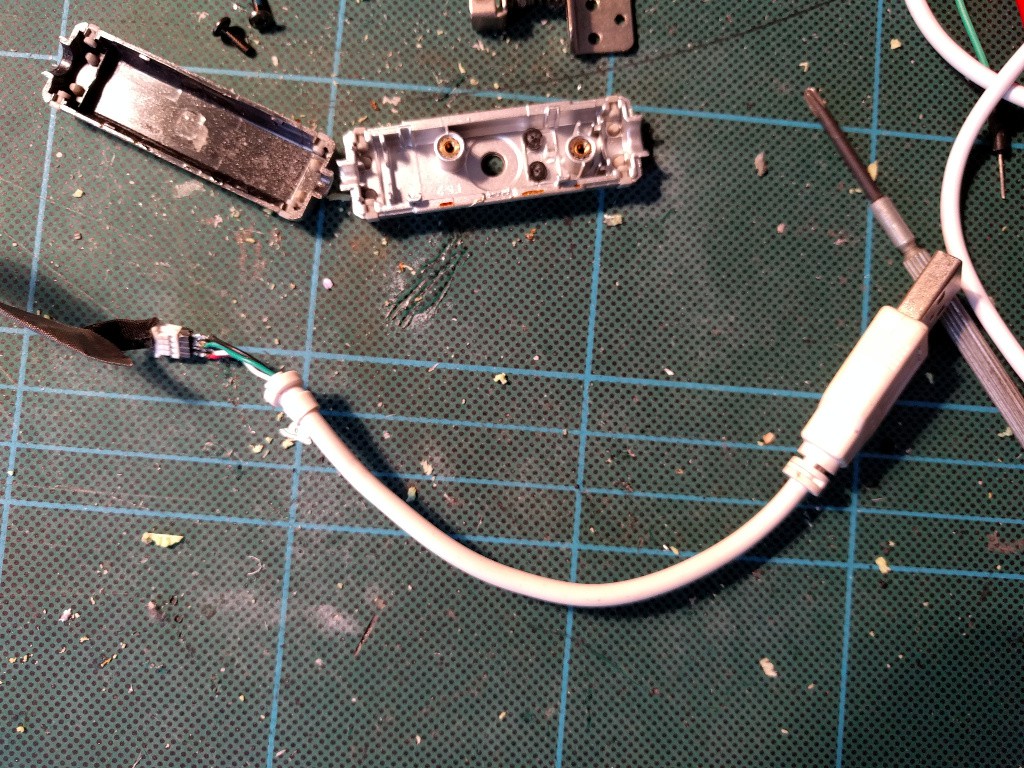
The cable has a plug, for convenience. I took my ohm-meter, and checked which cables are connected to the ground. In this case it was the green one, and, of course, the shielding -- the first two pins. The rest is easy: orange and red are D+ and D-, and black is VCC. In this cable, black and brown cables are connected to the same pin. Once I knew which cable is which, I used a piece of 1.27mm pin header to connect that to a normal USB cable:
![]()
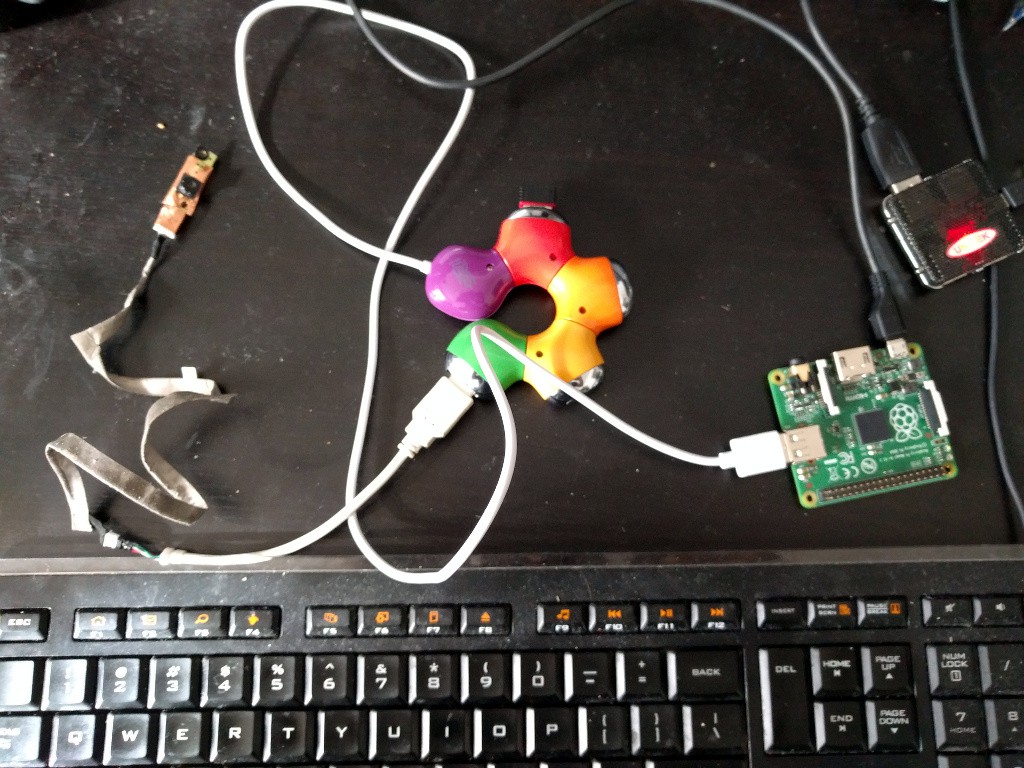
Then I needed a way to test it. I didn't feel like risking frying my laptop, so instead I took a raspberry pi and some cheap USB hub, and used that:
![]()
The camera enumerated nicely. Here's an excerpt from dmesg:
[ 3875.068666] usb 1-1.4: new high-speed USB device number 45 using dwc_otg [ 3875.176718] usb 1-1.4: New USB device found, idVendor=174f, idProduct=5a31 [ 3875.176759] usb 1-1.4: New USB device strings: Mfr=2, Product=1, SerialNumber=3 [ 3875.176779] usb 1-1.4: Product: USB 2.0 Camera [ 3875.176798] usb 1-1.4: Manufacturer: Sonix Technology Co., Ltd. [ 3875.176815] usb 1-1.4: SerialNumber: SN0001 [ 3875.190376] uvcvideo: Found UVC 1.00 device USB 2.0 Camera (174f:5a31) [ 3875.205832] input: USB 2.0 Camera as /devices/platform/soc/20980000.usb/usb1/1-1/1-1.4/1-1.4:1.0/input/input17
And here is lsusb:
Bus 001 Device 045: ID 174f:5a31 Syntek Sonix USB 2.0 Camera Bus 001 Device 003: ID 148f:7601 Ralink Technology, Corp. Bus 001 Device 002: ID 1a40:0101 Terminus Technology Inc. 4-Port HUB Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Then I installed motion and tried the camera with it. I had to modify the configuration to make the stream available outside of localhost. Otherwise, it just worked:
![]()
Unfortunately, motion has quite a bit of a lag, and if I wanted to use the streaming for controlling the robot remotely, that would be unacceptable. So I decided to try mjpegstreamer. There is a simple tutorial on installing mjpegstreamer on Raspberry Pi. Of course instead of using files as input, I used input_uvs.so plugin:
./mjpg_streamer -i 'plugins/input_uvc/input_uvc.so -r 160x100 -fps 20 -y -q 40' -o 'plugins/output_http/output_http.so -w www'With such a low resolution and quality, the streaming is quite fluent!
I noticed, that the camera module is getting quite warm while working. @Arsenijs suggested, that those laptop modules, while pretty much normal USB devices, expect lower voltage than the usual 5V. I will have to try and power it from Pi's 3.3V power and see how it works then.
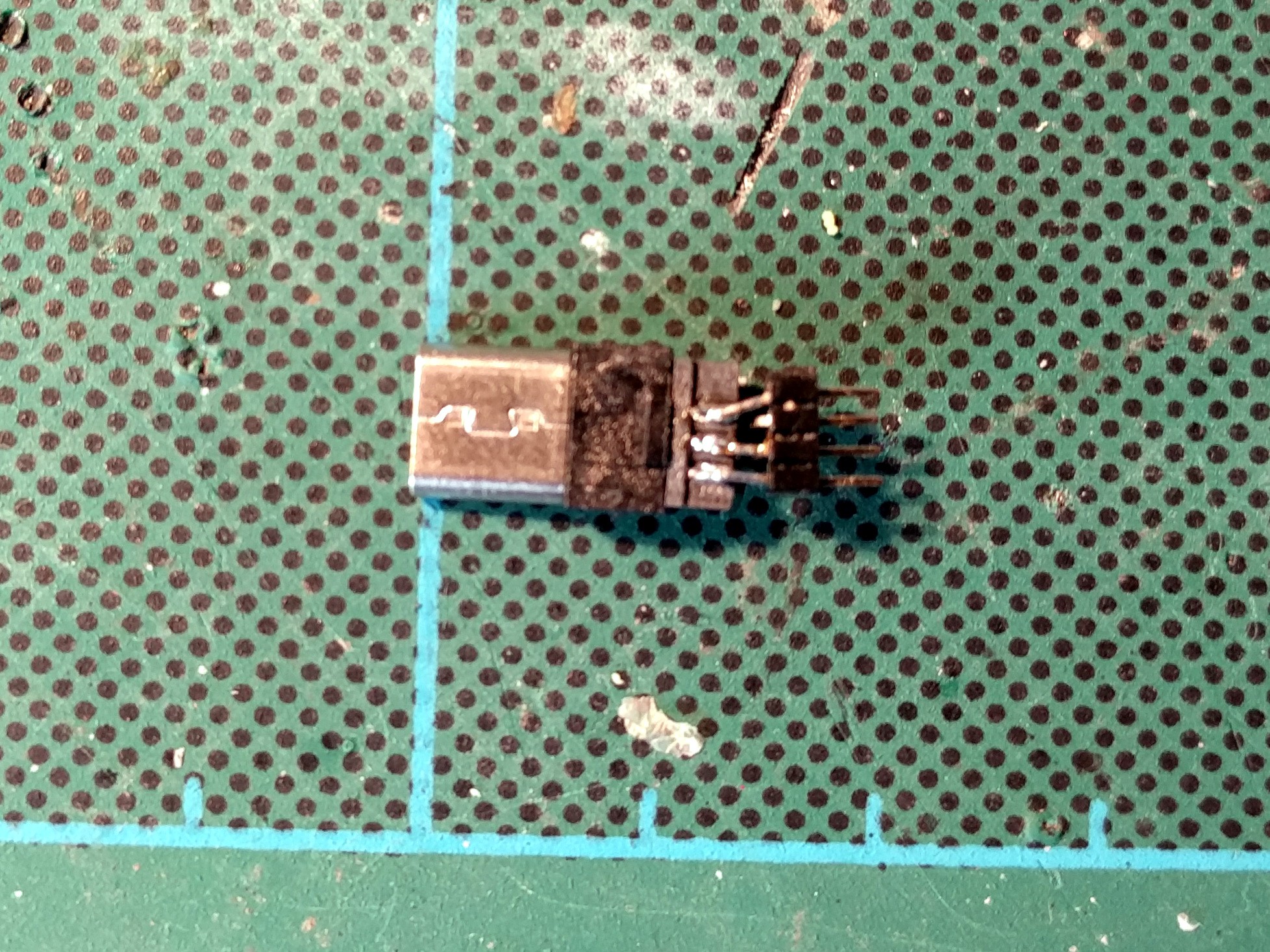
I also made a plug for the Pi Zero, to save some space:
![]()
That should work, but then I can't have the WiFi dongle. I guess I will need to look into making Tote Zero compatible with the #RPi WiFi pants (or even add the ESP8266 to Tote's PCB).
Update: I made a smaller cable for the Pi Zero:
![]()
While that makes it impossible to use the WiFi dongle, I can still use OpenCV with this camera to make the robot analyze what it sees and actually do something fun.
-
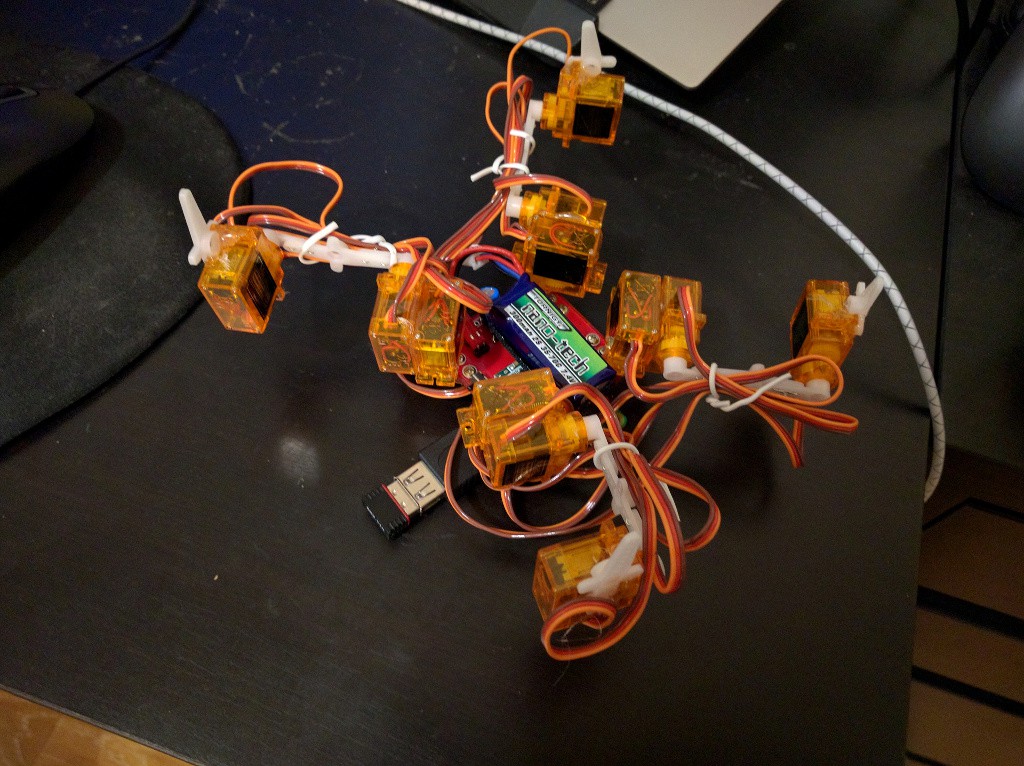
First Walk
01/27/2016 at 14:00 • 0 commentsSo today I figured out which servo is on which leg, rebuilt the legs to make the coxas longer, trimmed all servos again, added pieces of rubber tube as feet, and replaced the battery with a larger one.
I also adjusted the voltage to be exactly 5V (it was 5.2V for some reason), hopefully that will make this thing heat less.
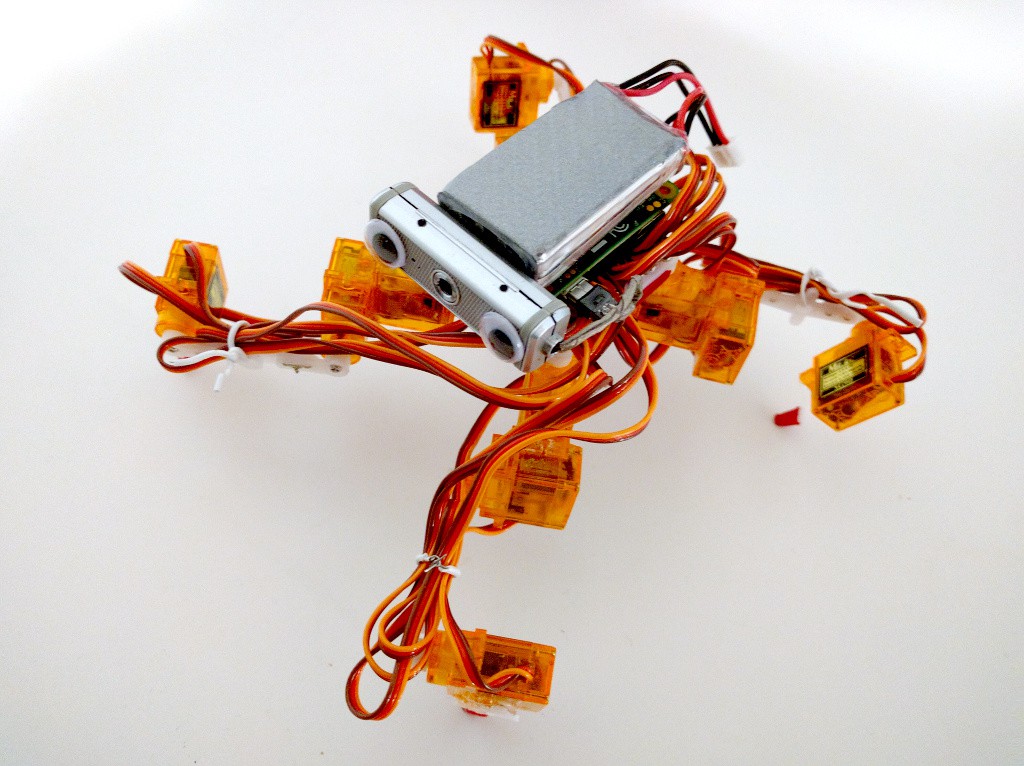
Finally, I made some small fixes and adjustment to the code, and lo and behold, we have a walking robot!
It's still not perfect, of course, but at last it works.
-
One Step Forward, Two Steps Back
01/26/2016 at 22:55 • 0 commentsToday I finally adapted all the code for IK and walking, and realized that practically everything I did yesterday is wrong.
First, the cheap WiFi dongle that I soldered to the mini-hub is really bad. It gets hot and eats enough current to make the Pi Zero restart when the servos move. I had to switch to console over serial.
Second, before you laboriously trim all the servos to the right positions, make sure the new servo library that you wrote takes the same range of angles as the old one. In this case, the old one took -90° to 90°, and the new one takes 0° to 180°. The result is that all the servos are wrong by 90° and I have to redo the trimming.
Of course the board has a tendency to restart when all the servos are switched on simultaneously anyways, so I had to add some code that switches them one by one, with some delays. Nothing new here, old #Tote had the same thing, and it's a good idea anyways.
I still have to figure out which pins are for servos on which legs -- I didn't keep track of that when connecting them, and I figured it would be easier to just go one by one in software and see which leg moves.
Hopefully I can get the first walk by the end of the month.
-
Single-port USB Hub
01/25/2016 at 21:36 • 1 commentIn order to make working on the robot a little bit easier, I added a small USB hub that I had lying around, with a cheap WiFi card soldered to it. This way I have access to the board and still can use a single USB port for, say, a webcam.
![]()
Otherwise the progress has been slow. I adjusted and trimmed the servos, so that the robot can stand in the "zero" position, but I still haven't tested the inverse kinematics or walking code.
-
Fixed Board
01/07/2016 at 21:49 • 0 commentsAfter some cosmetic touches, I'm finally happy enough with the first version of the PCB for this robot. It looks something like this:
![]()
The Fritzing file is in the repository, and the Gerber is available for download. I used a new approach for the servo sockets -- since the Pi Zero is going to be plugged as a second layer, we don't really have enough space for the usual servo sockets. So I used one long header with angled pins -- the servos plug in two rows into that, fitting between the Pi and the board.
Other than that, the board has the serial and I²C pins broken out, and also a header for all the pins that are not used for controlling servos. There is also a jumper in there, for disconnecting the servo power from the Pi -- so that we can power the two from two different sources if we need to.
The usual holes, as in Tote, are for attaching the servo horns for the legs.
-
Servo Blaster
01/07/2016 at 20:47 • 0 commentsSo I have the robot assembled pretty much the way I wanted -- the PCB as the body, a XM1584-based voltage regulator for steady 5V to the Pi and to servos, capacitor, power switch, 2S LiPo battery. Nothing fancy, really. I have no voltage monitoring this time, because the Pi doesn't have an ADC that I could use (I might add one in the future versions), so I have to be careful about the battery use.
I also have the Servo Blaster, the daemon I'm using to generate PWM signal for the servos, all installed and configured, and I have a simple Python class to use it:
import math class Servo(object): def __init__(self, servos, index, reverse=False, trim=0): self.servos = servos self.index = index self.reverse = reverse self.trim = trim def move(self, radians=None, degrees=None): self.servos.move(self.index, radians, degrees, self.reverse, self.trim) class Servos(object): min_pos = 600 max_pos = 2400 unit = 4 # us max_servos = 12 pos_range = 180 def __init__(self): self.device = open('/dev/servoblaster', 'w') def __getitem__(self, index): return Servo(self, index) def move(self, servo, radians=None, degrees=None, reverse=False, trim=0): if degrees is None: degrees = math.degrees(radians) degrees += trim if reverse: degrees = self.pos_range - degrees position = self.min_pos + (degrees * self.pos_range / (self.max_pos - self.min_pos)) position = min(self.max_pos, max(self.min_pos, position)) output = position / self.unit self.device.write("{}={}\n".format(servo, output)) def update(self): passNow it's time for my favorite pastime (not): figuring out the order, orientation and trims for all the servos. Once I have that, I expect my code for the PyBoard to basically work -- which means that I should have the basic creep gait. For now, I can move each of the servos individually, while the robot lies on its back, with a wifi dongle connected for control:![]()
-
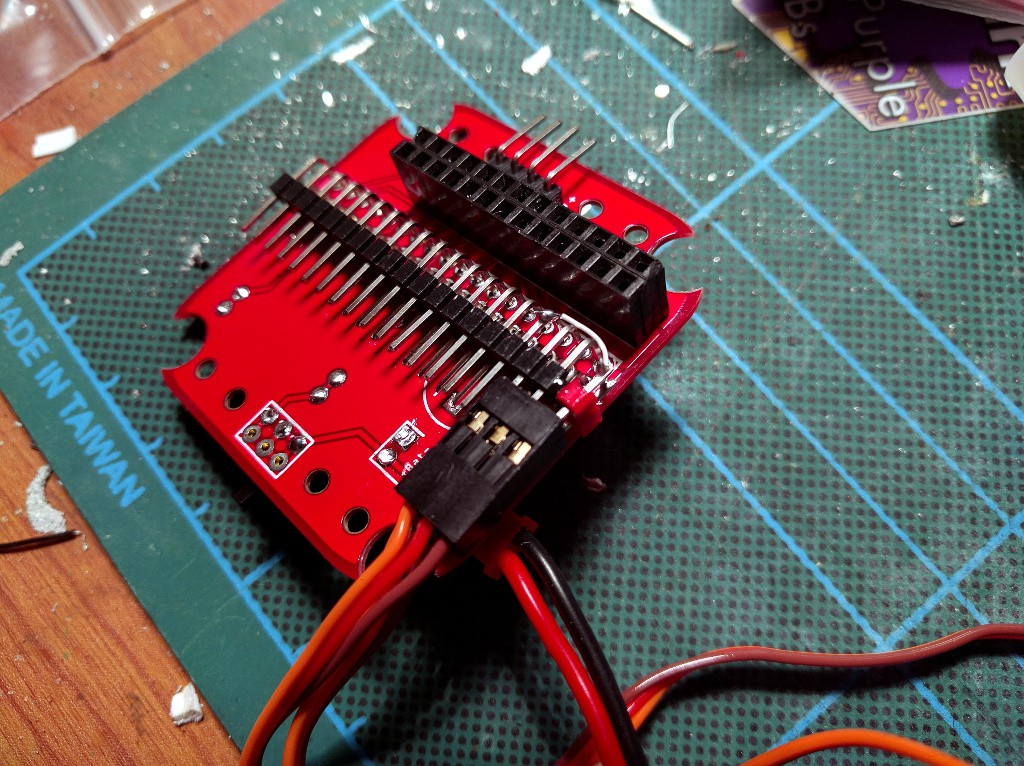
Off By One Servo Plug
01/05/2016 at 16:59 • 0 commentsMistakes in PCB design happen, and usually hurt when you receive your fabricated PCB. I was in a hurry to send the Tote Zero's PCB to fabrication before Christmas, so that I can receive it when I come back from the holidays. And as you can guess, I made a mistake. Instead of making the servo headers GVSGVSGVSGVS... (that's ground-voltage-signal), I made them VSGVSGVSGVSG...
What now? Of course, I will eventually order another PCB (especially since this one doesn't have all the extra pins of Pi Zero broken out, and they may come in handy later for sensors or extra servos), but for now I would like to be able to test other aspects of my robot, so that the next design includes any fixes and ideas I come with. So I really want to use this board as it is.
I could "fix" this by disassembling the plugs of the servos, and changing the order of wires in them. In fact, it's not a lot of work, even for a dozen servos. But from my experience, sooner or later I will forget about this, and either connect an un-modified servo, or use those modified servos for something else and release the magic blue smoke. I'd prefer to avoid this.
So instead I plugged the servos offset by one pin, and glued additional pins in front for the one plug that sticks out and misses its ground pins (the additional pins are red):
![]()
It's not pretty, but it will do for now. I also fixed my PCB design files already, so that I don't forget about it.