0%
0%
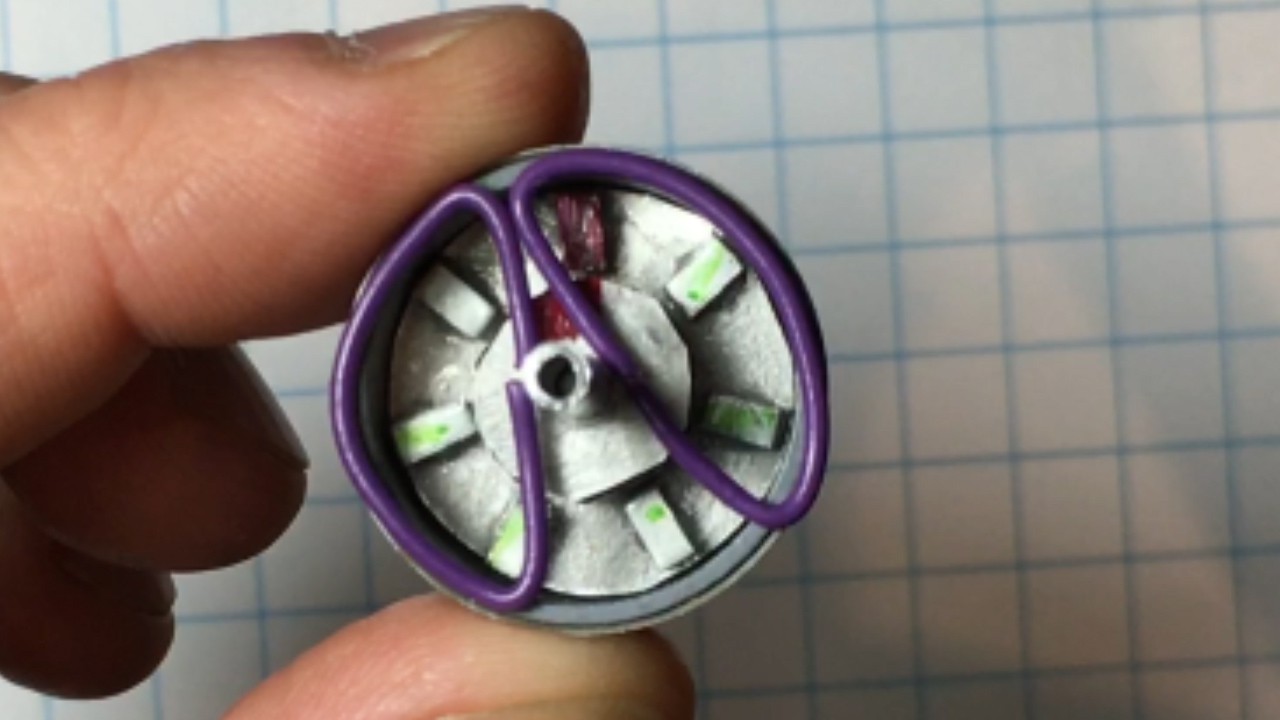
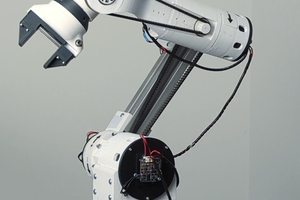
3D Printed Robot Actuator
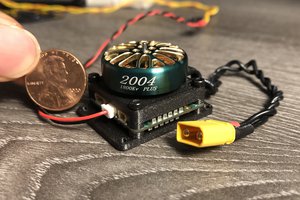
A high speed and high torque robotic actuator using low-cost brushless motors, custom controller, 3D printed parts and bearings.
 Paul Gould
Paul GouldBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests










 Christopher Xu
Christopher Xu
 Petar Crnjak
Petar Crnjak
I have an updated design. The bolts helped, but the actuator still binds when the assembly is compressed axially. This new version includes aluminum spacers. Switch back to version 50 for a better view.
https://a360.co/2yxWgQO
I built a prototype of the base design. Clearances look good, I'll print out a new prototype when the spacer parts come in with PETG.
https://i.imgur.com/kwM9mN0.jpg
It looks like you're planning on using these at 12v. Would it be reasonable to assume that it should approach 20Nm of force at 24v?
I've been looking at your spring compliance setup. I don't see a 3rd sensor for spring deflection. I think... that if you're measuring shaft count / position and joint position after the spring you should be able to derive force and imitate compliance. I have an idea or two on how to integrate that into the actuator.
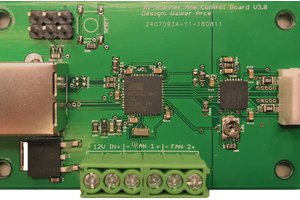
And after futzing about a bit with the stm32f103, and then moving to the stm32f302 after realizing that the 103 makes you choose between CAN and USB, it dawned on me that there is no point. The PSOC 4 is a good fit for this application and seems to work well. PCB design isn't my strong suit, but I'm working to convert your design to a circular board integrating an AS5147 in the center, and using one of your carrier boards underneath for the motor shaft. This minimizes the SPI cable length, and puts the electronics right on the actuator.
Speaking of which, where are you guys finding the AS5147/AS5047? Mouser and Digikey are out.