 Dimitris Xydas
Dimitris XydasIn addition to trying to provide this robot build with autonomous behaviour (e.g. SLAM navigation), another objective is to explore various innovative ways of controlling its moving and walking behaviour, and its interaction with the user. The walking and steering motion of the robot can already be controlled via the GUI, keyboard or XBox One game controller.
So I am currently working on the improvement of the current user-controlled functions, as well as the implementation of some interesting new ones:
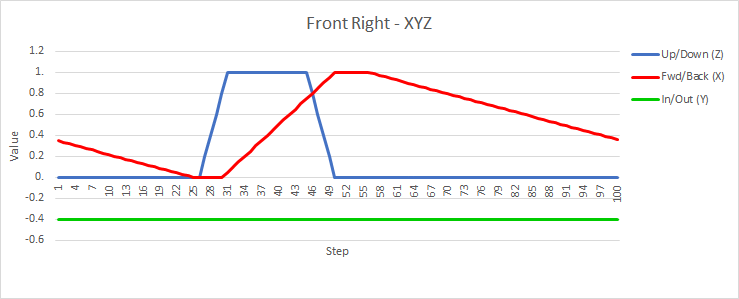
- Fine-tune input for controlling the walking and steering motion of the robot.
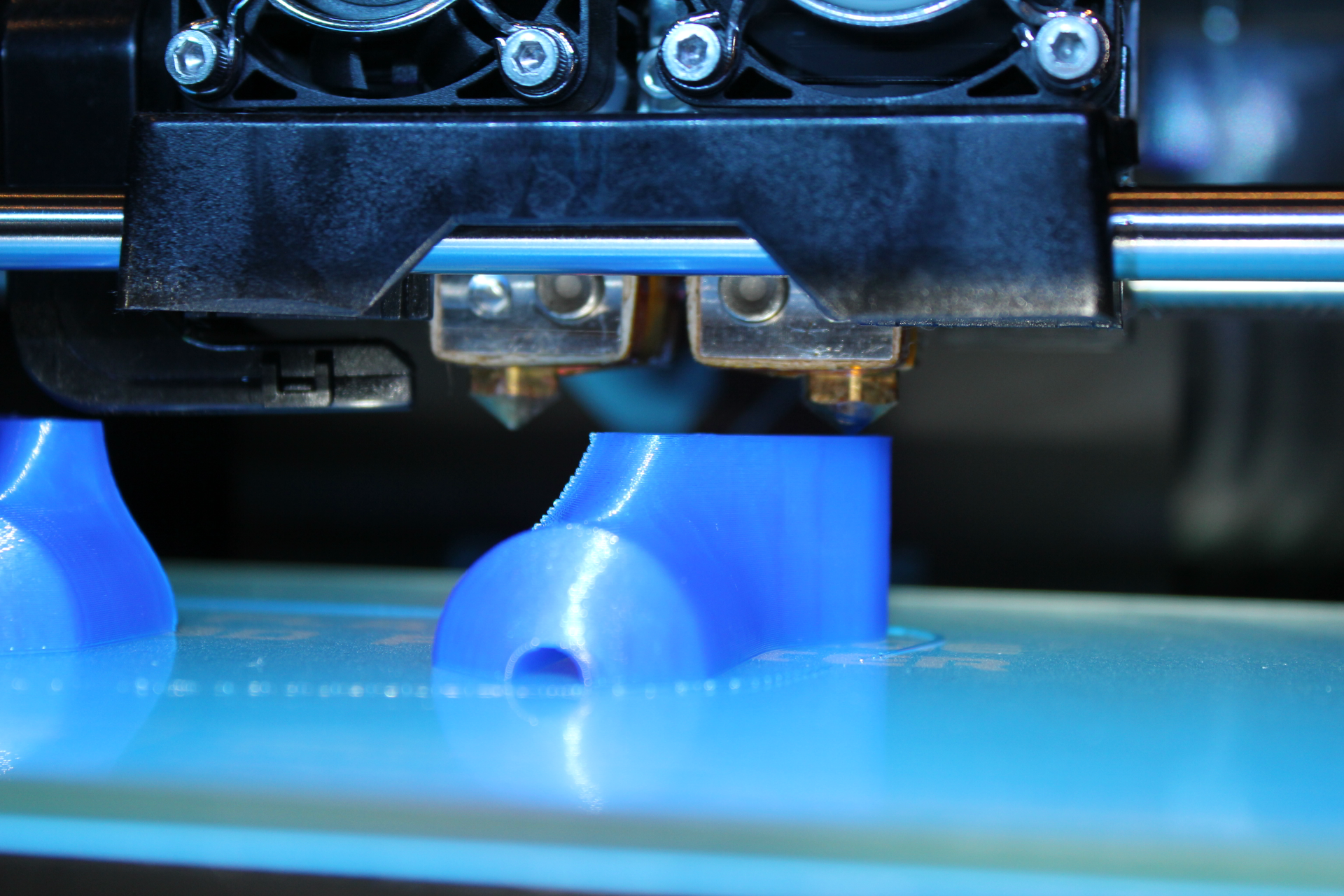
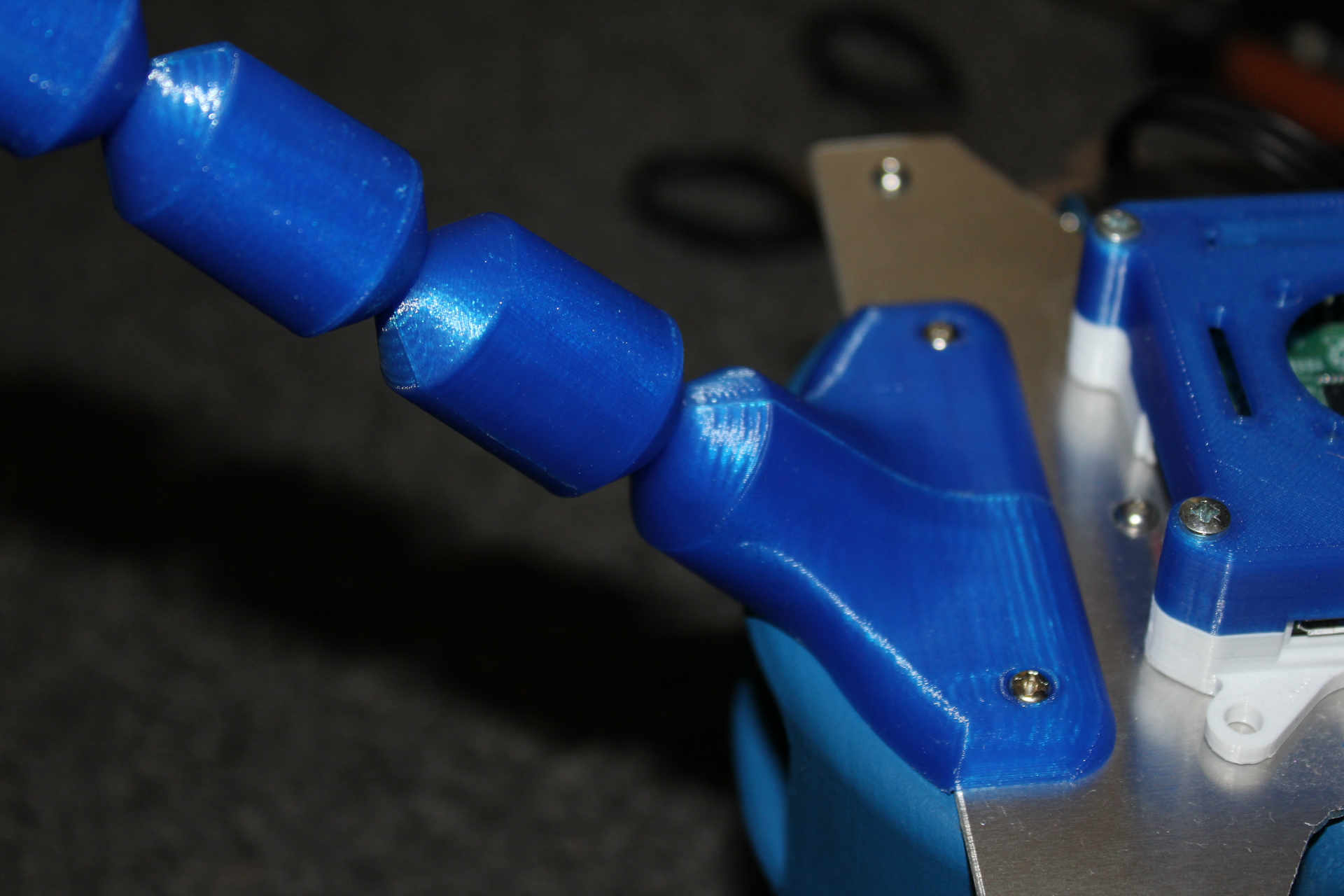
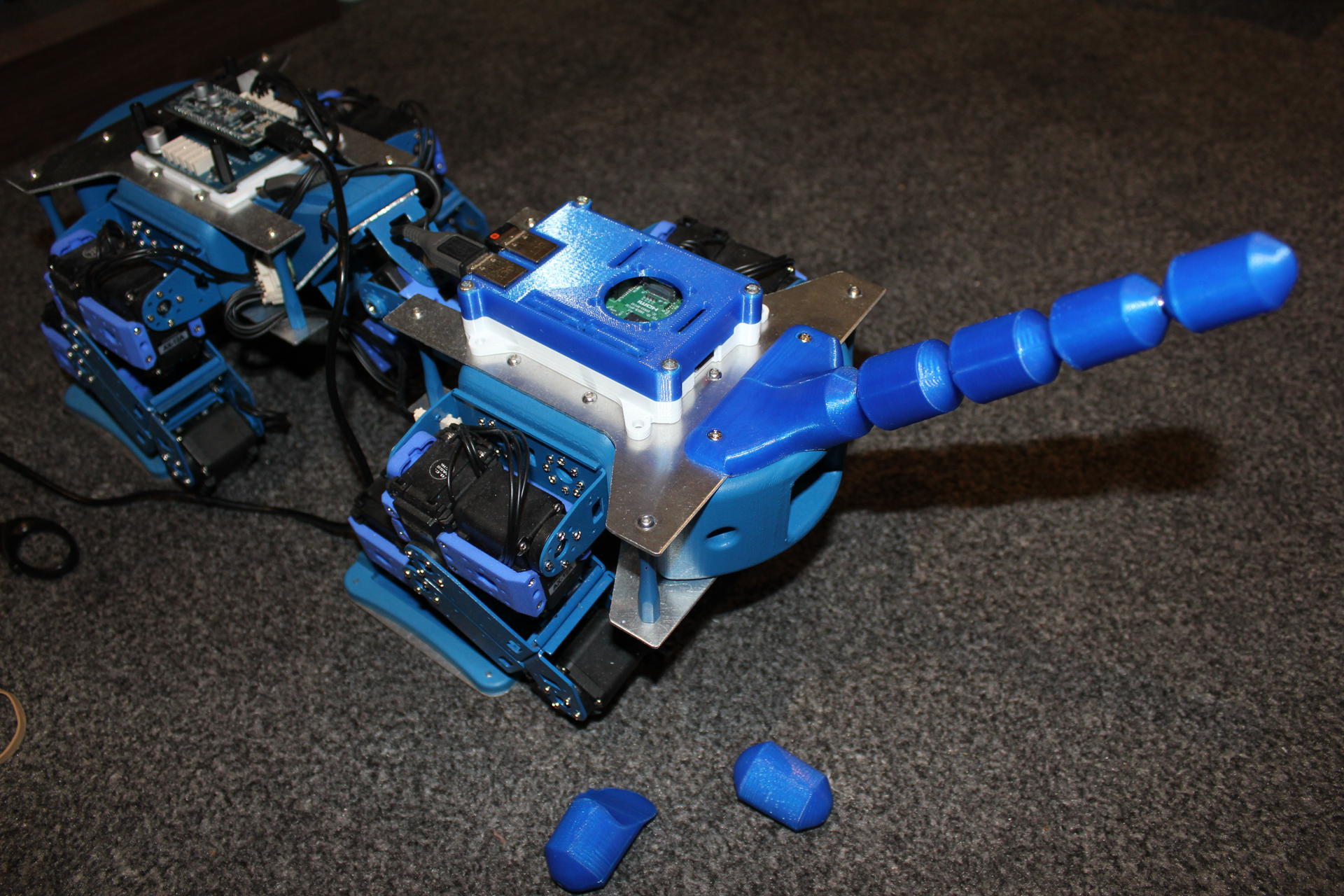
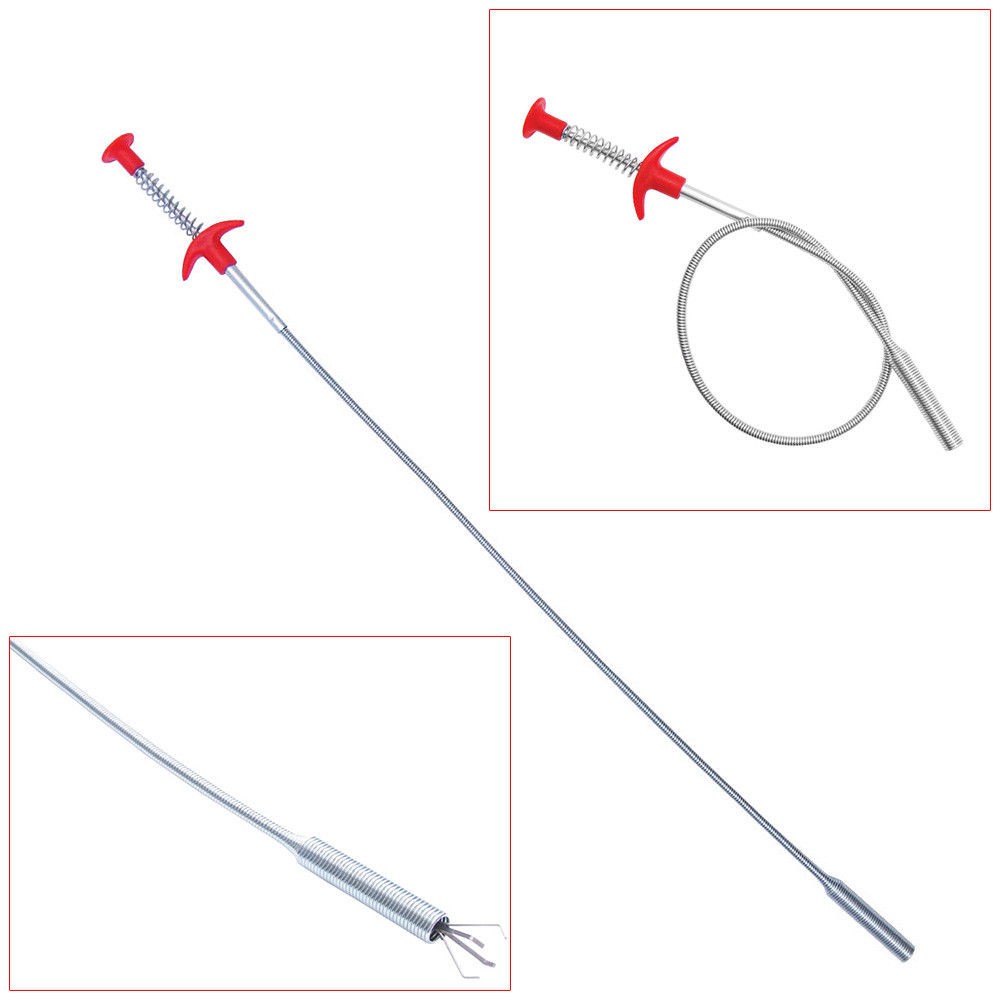
- Exploring interesting ways that a robot 'tail' can interact with the user.
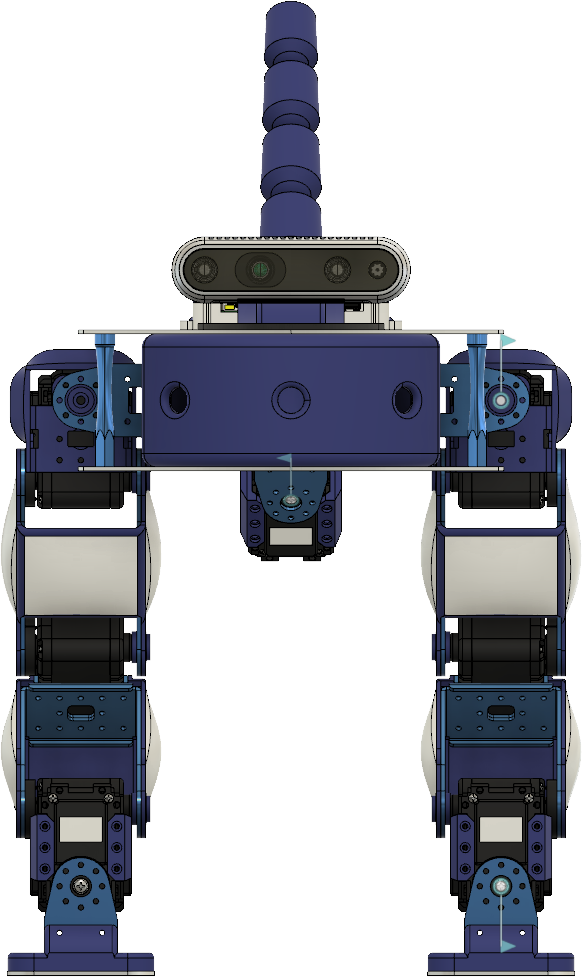
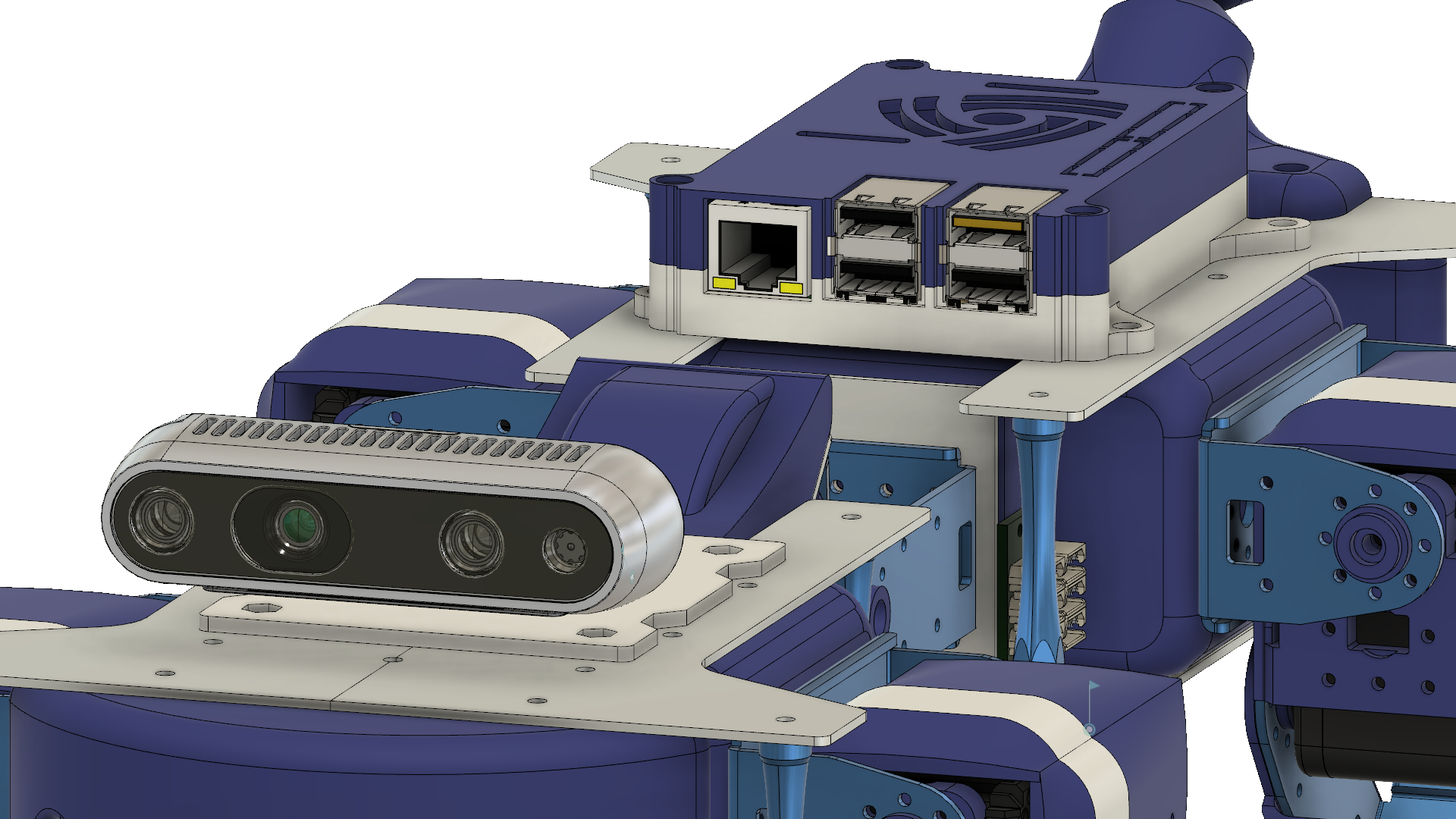
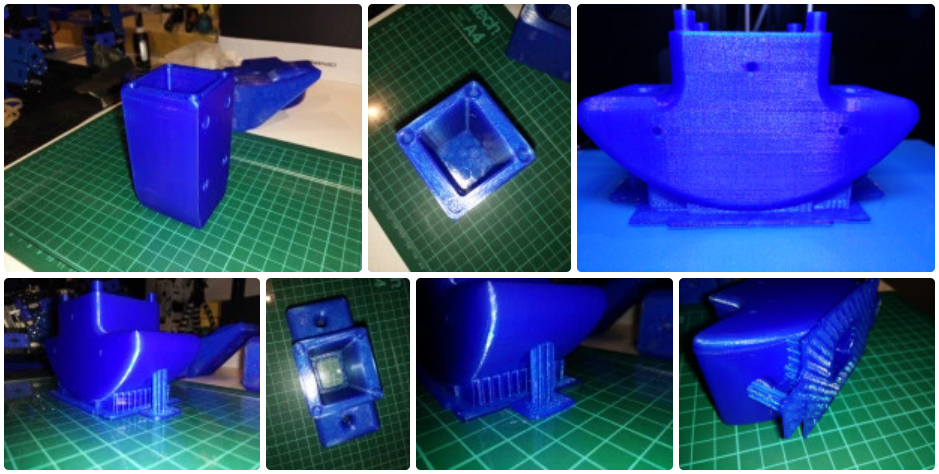
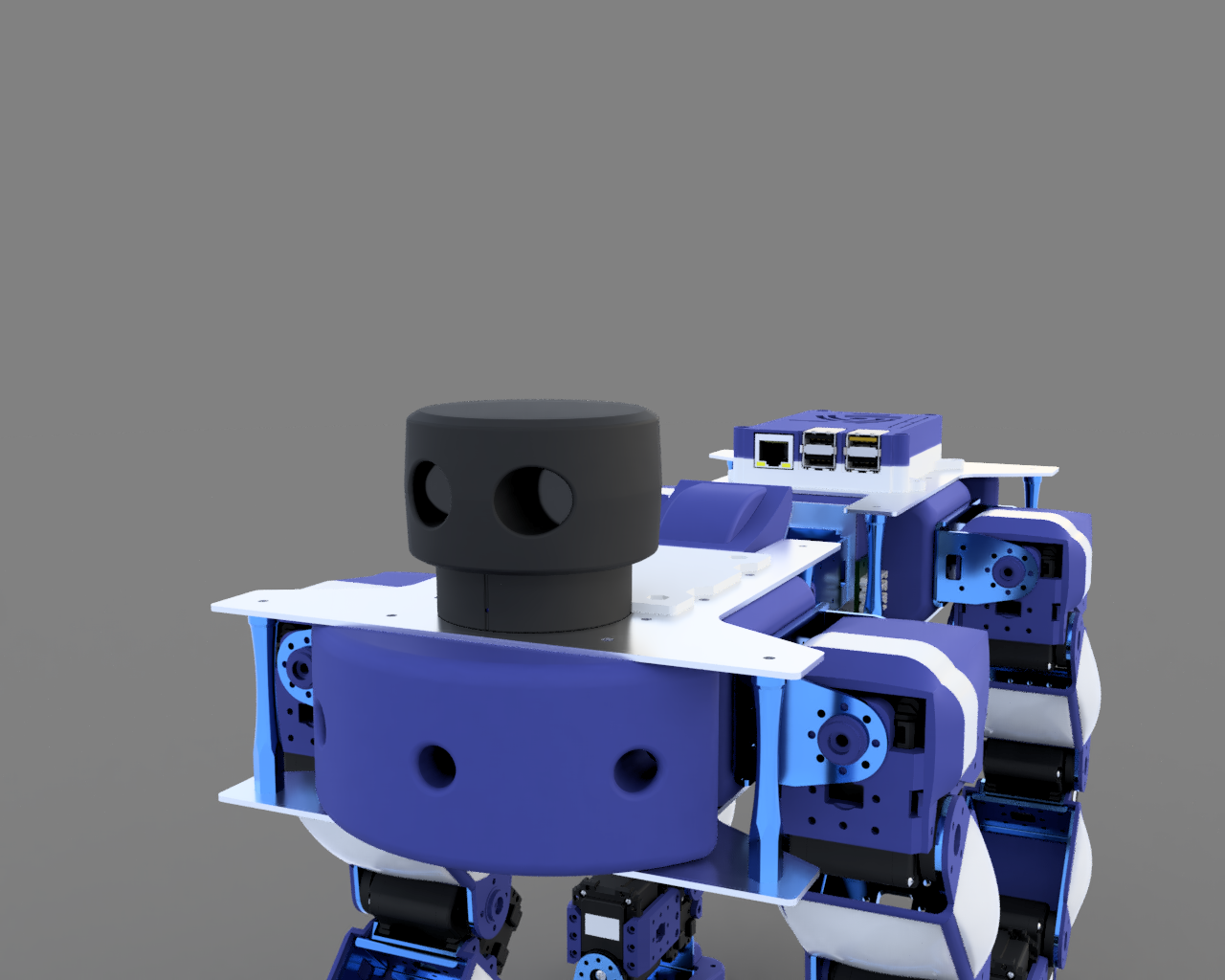
- Adding a 3D sensor head to the robot, such as an Intel RealSense depth camera, and visualising the environment.
- Updating the user's graphical interface, based on previous work done using a Qt-based GUI written in C++ and integrated with the USB motor controller as well as the ROS ecosystem.
More details and progress on this project can be found on my blog:
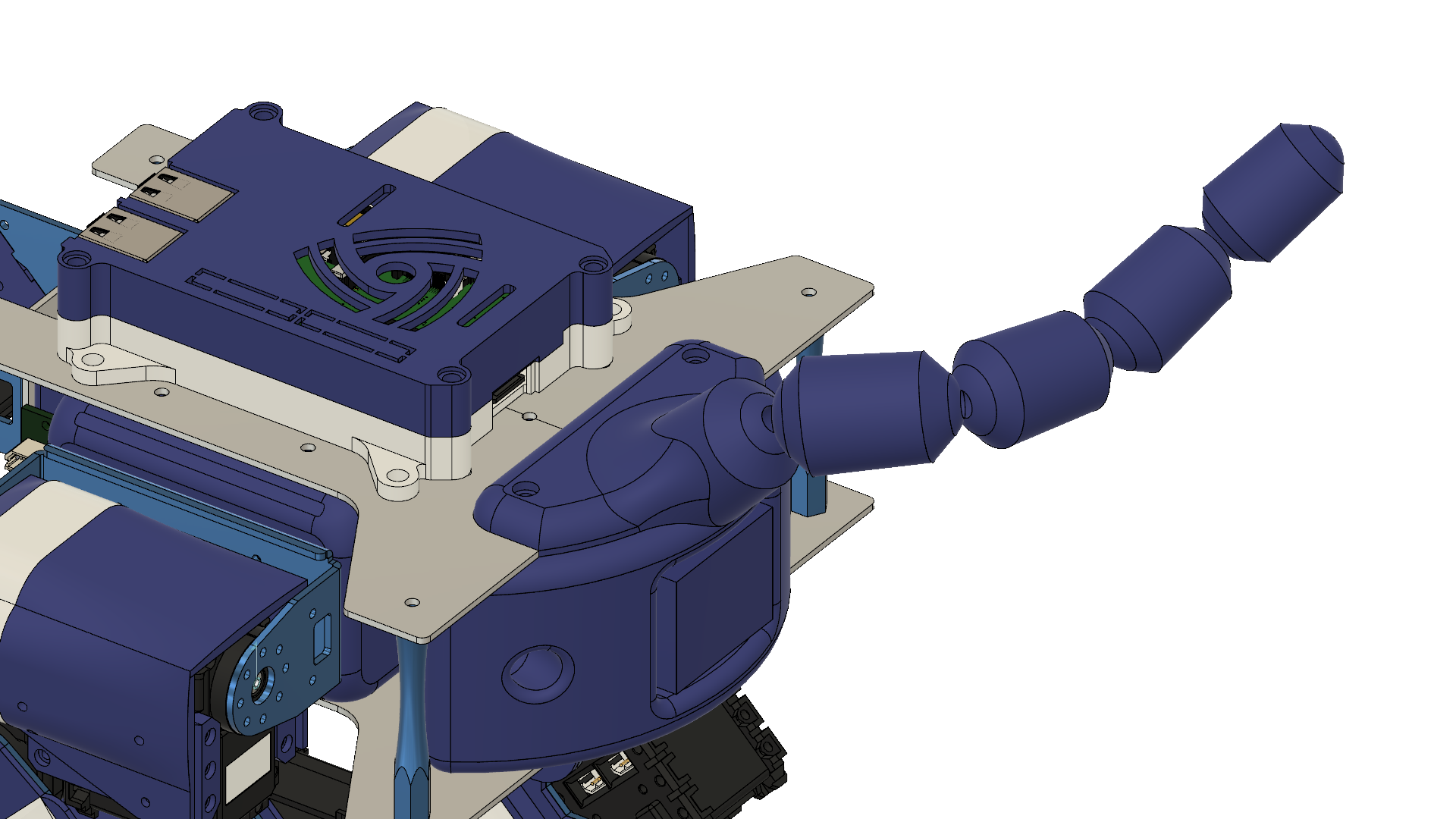
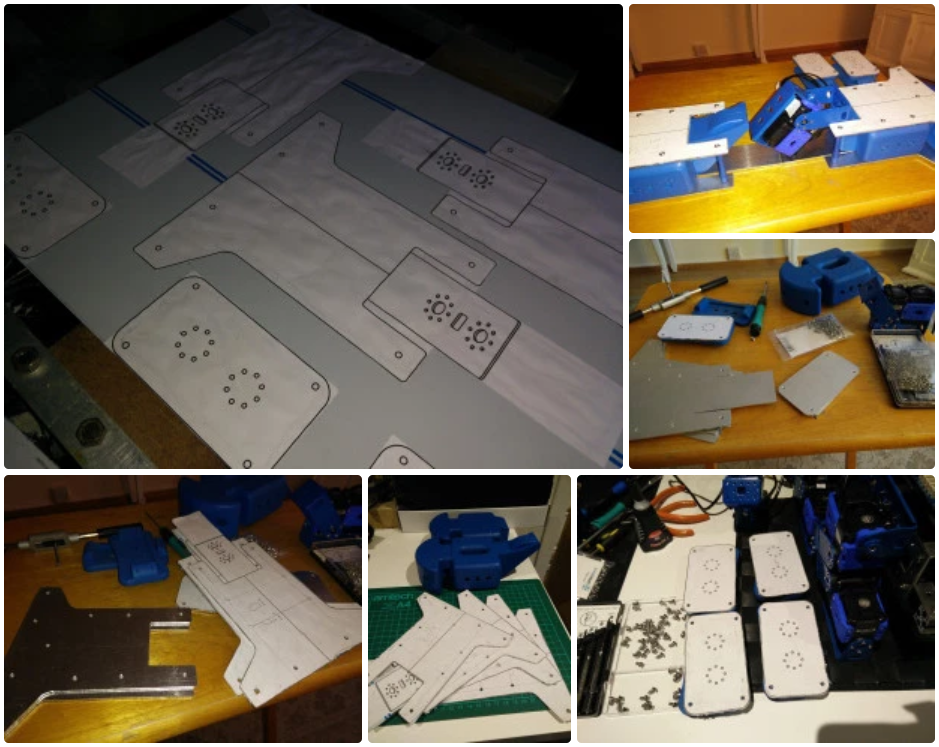
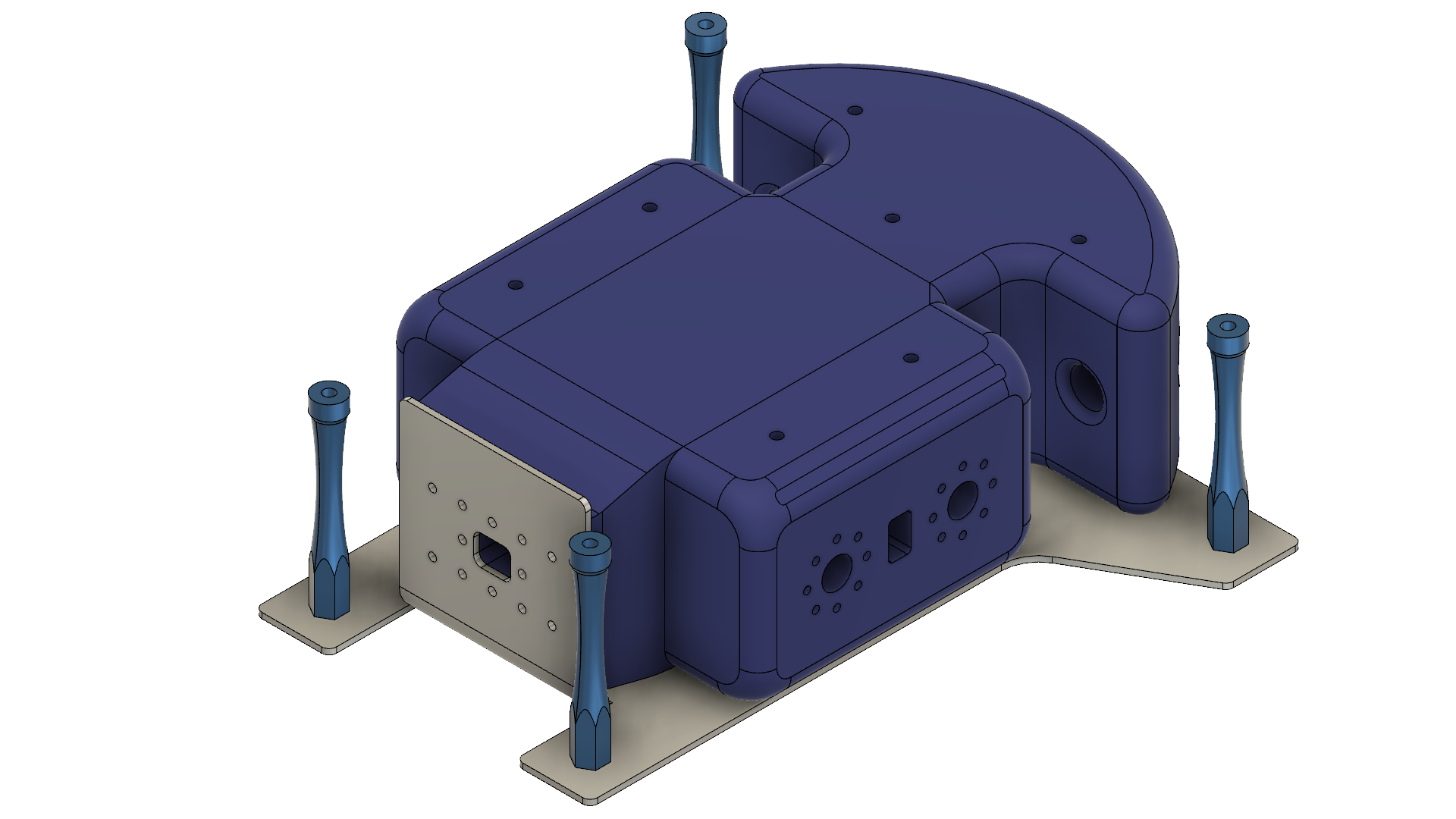
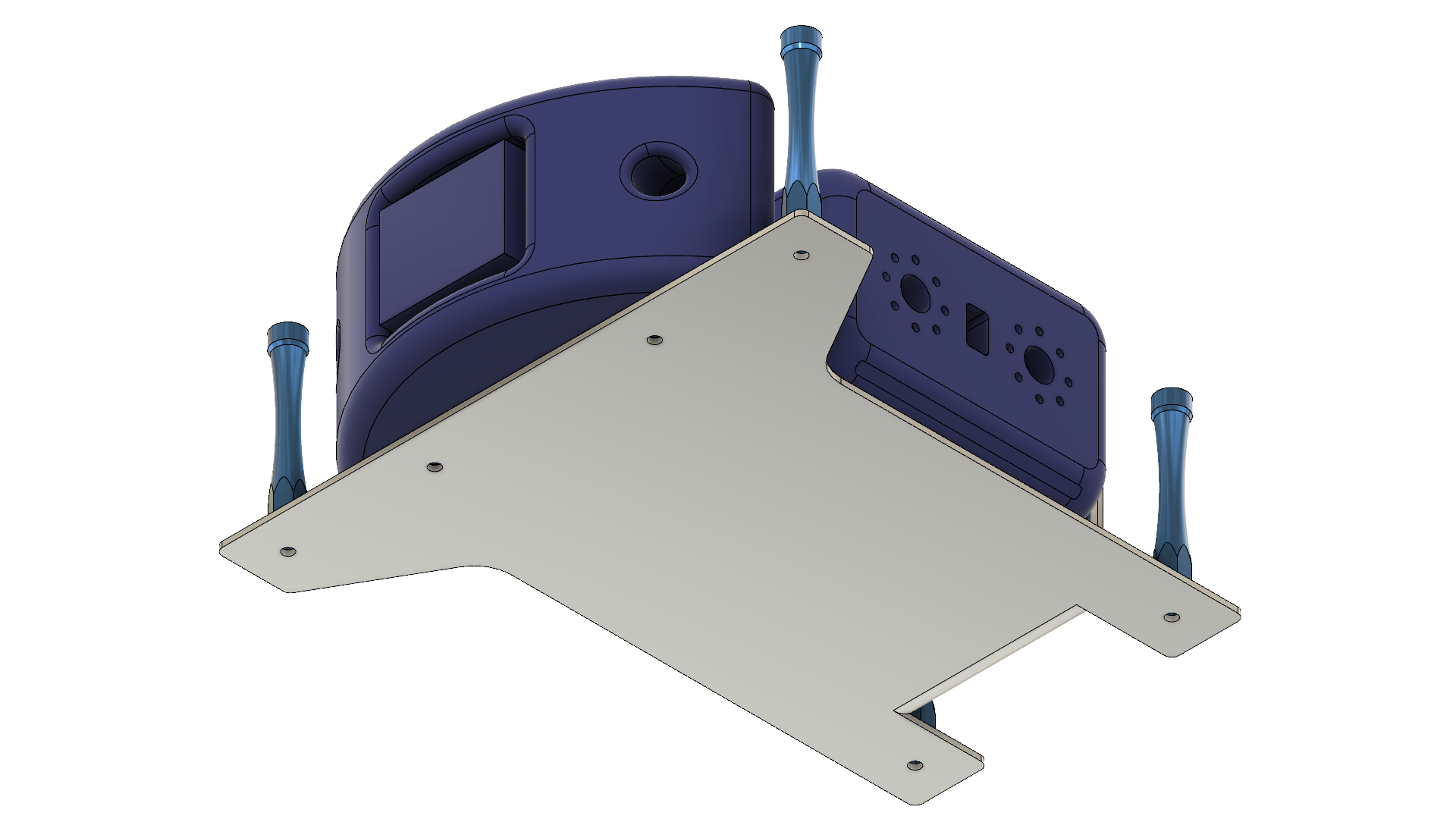
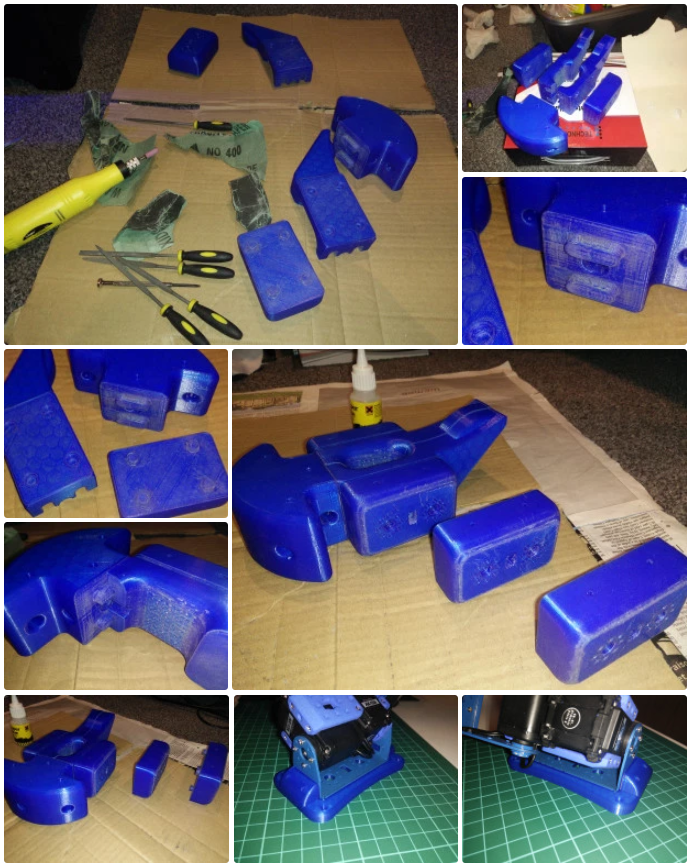
 The CAD model went through a couple of iterations before deciding on the final form: from 8 polygonal sections to six smoother and smaller sections.
The CAD model went through a couple of iterations before deciding on the final form: from 8 polygonal sections to six smoother and smaller sections.






















 Original – Creep – Unsmoothed
Original – Creep – Unsmoothed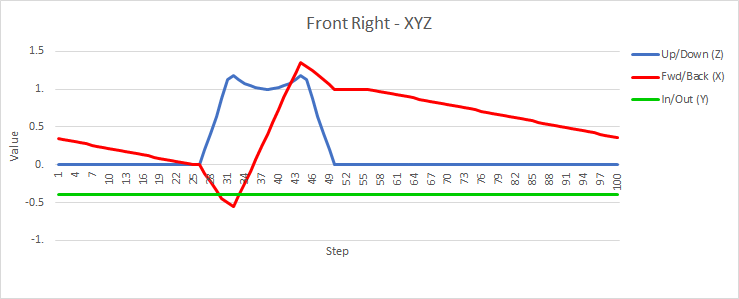 Adjusted – Creep – Unsmoothed
Adjusted – Creep – Unsmoothed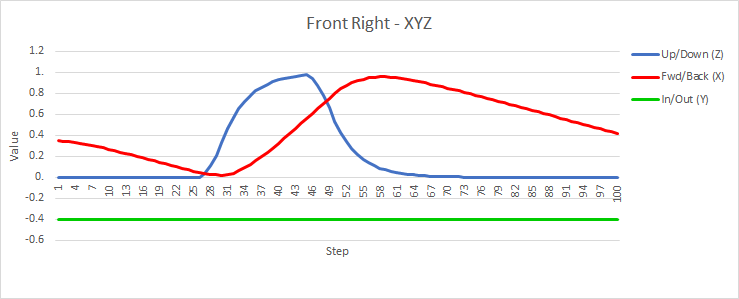 Original – Creep – Smoothed
Original – Creep – Smoothed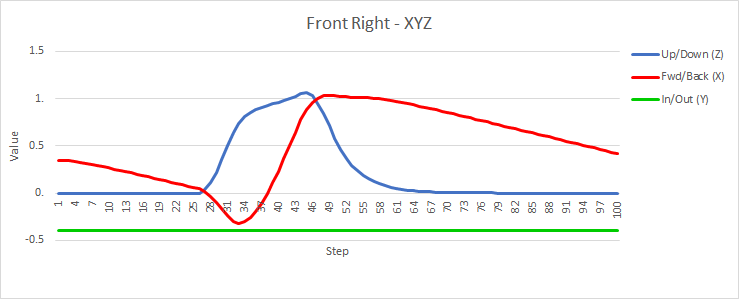 Adjusted – Creep – Smoothed
Adjusted – Creep – Smoothed Original – Walk – Unsmoothed
Original – Walk – Unsmoothed Adjusted – Walk – Unsmoothed
Adjusted – Walk – Unsmoothed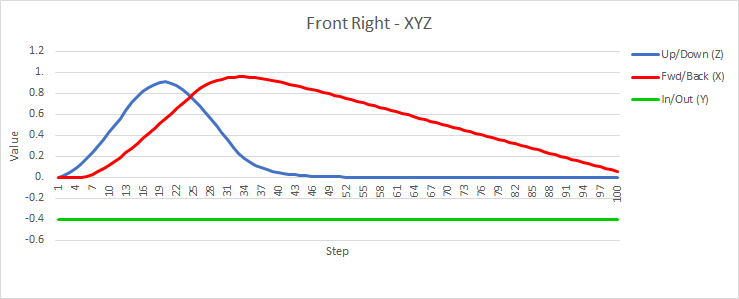 Original – Walk – Smoothed
Original – Walk – Smoothed Adjusted – Walk – Smoothed
Adjusted – Walk – Smoothed Original
Original Adjusted
Adjusted





 Elliptical path test
Elliptical path test Quad kinematics gait test
Quad kinematics gait test Gait foot pitch test original
Gait foot pitch test original Gait foot pitch test adjusted
Gait foot pitch test adjusted






Hey Dimitris, not sure if you're still working on this, but I have some boards I used to sell for FSR sensors, using an ATmega168. I just got a new set made up for my bioloid quad Roz, but I'll gladly share the PCB files and the firmware if you want them. They are bus-based boards, and plug into the servo bus. https://photos.app.goo.gl/YYsGQpU3YcTwLaZV8