 Capt. Flatus O'Flaherty ☠
Capt. Flatus O'Flaherty ☠-
More Test Beds Planted
05/23/2018 at 12:33 • 0 commentsAs the season continues, the ground dries out a bit more and it's possible to get a much finer tilthe in the soil, which provides a different environment in which to test the machine.
![]()
![]()
Blue ropes are laid down for the machine to use as an even more accurate guide than GPS. Cameras can pick up on the rope and translate it into x, y coordinates which can then guide the machine's steering.
-
WEEDINATOR Team Test the Machine
05/22/2018 at 08:45 • 0 commentsTeam members put the weeding claw into action.
![]()
-
Project Milestone Reached: Seamless Satelite Navigation
05/20/2018 at 08:01 • 0 commentsSince the project was first started, it's taken one whole year to get to this stage: satellite navigation through a series of waypoints, accurate enough to stick to a conventional farm track (plus or minus 25mm).
I never thought we would get to this stage so quickly and the CNC mechanism was never meant to be built this year either ….. But it's done! Also, we've started exploring advanced object recognition (deep learning, Ai, neural networks etc) with the Nvidia Jetson TX2. Please join the project if you have relevant skills!
-
Improved Navigation Code Tested on Machine
05/11/2018 at 10:35 • 0 comments -
Making Doughnuts in the Field
05/10/2018 at 16:57 • 0 commentsWEEDINATOR now runs really well when going up hill or on the flat:
But struggles to go downhill! Maybe needs some mechanical braking or something?
-
Torque control now in place!
05/09/2018 at 16:04 • 0 commentsWhen the machine was driving over rough ground the wheels would lose synch with each other and get positional errors showing on the motor drive displays. A current sensor PCB was built to override positional control when necessary by effectively monitoring the torque instead:
The machine was made to drive over a ramp under one of the wheels to simulate uneven ground and the MCU code was tweaked to get the torque balanced throughout the operation.
-
First Weeding Test
05/05/2018 at 14:08 • 0 commentsThe components for the weeding claw mechanism have arrived!
![]() ..... And the removable sub assembly welded together:
..... And the removable sub assembly welded together:![]()
This is bolted onto the Z axis travel plate, the motor tuned in Leadshine Protuner and the machine is ready for the first test, literally, in a field:
-
Cultivation and Planting of Test Beds
05/01/2018 at 14:03 • 0 commentsHopefully the parts for finishing the CNC mechanism - the rotating claw will arrive in the next couple of days. In the meantime, the machine needs something to test out it's capabilities. A conventional tractor was used to prepare the soil by ploughing with an old 2 furrow Massey Fergusson plough and then 'rotovating' - breaking up into a 'fine tilth' with an equally ancient Howard rotovator:
![]()
The beds are then marked out with stakes and baling string to create wheel tracks for the machine spaced at 56" centres. The bed itself is 44" wide and three rows of swede 'plugs' are planted at 12" (300mm) spacing. The claw itself is currently 180 mm diameter so there should be plenty of room for error and allowance for the plants getting bigger:
![]()
-
Basic structure of the back-end is working.
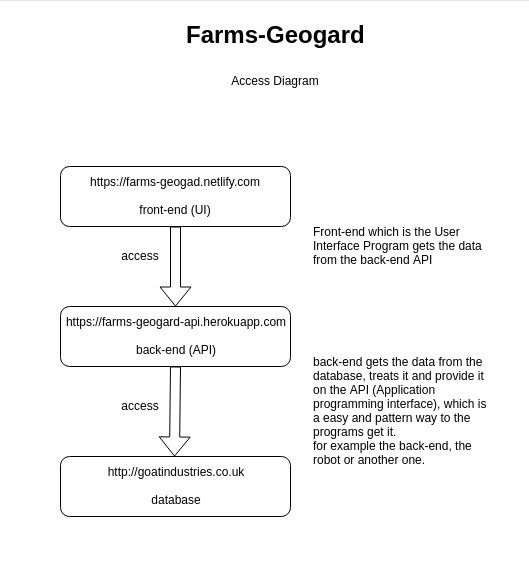
05/01/2018 at 07:56 • 0 commentshello guys! the basic structure of the back-end is working.
in this diagram we can see how it works:
![]()
so if you access the site https://farms-geogard.netlify.com , now it's getting data from DB on goatindustries.co.uk (I've create some tables there)
and to see how the API works there is a client in this address:
https://farms-geogard-api.herokuapp.com/graphiql
we need to pass a query for him, so for example if you type it the following query on the left panel and click on the play symbol we'll get all the coordinates from the DB:
{
allPaths {
lat
lng
}
}
this is just a simple example, there is another queries implemented, but we'll have much more.
I'll explain more about this on the future, for now it's just to you guys have some start view
Rafael Neves de Almeida
-
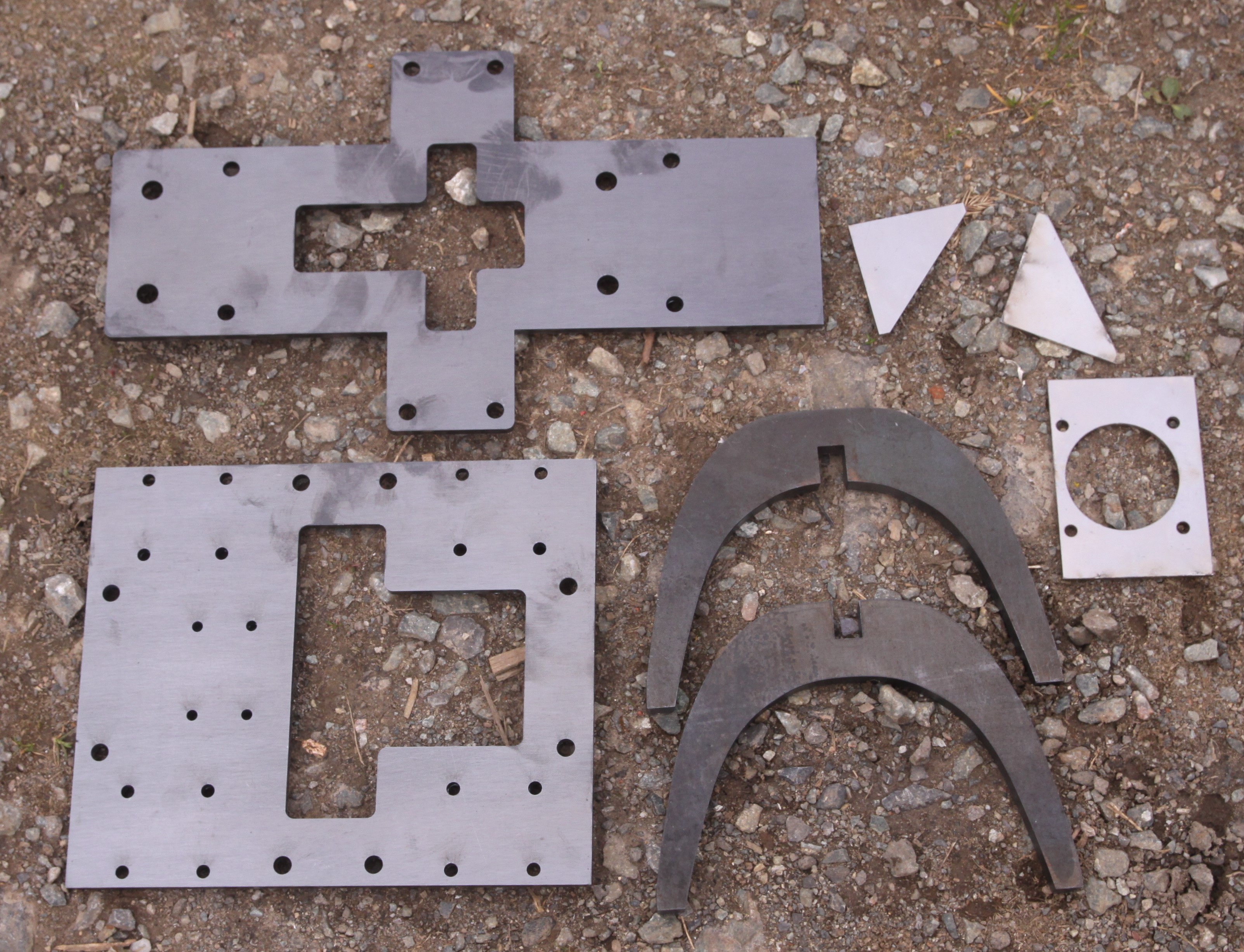
Weeding Claw Mechanism
04/25/2018 at 10:30 • 2 comments![]() The weeding claw has previously been tested on this tractor mounted machine as shown above. Now it needs to be replicated on the WEEDINATOR, but instead of four claws working simultaneously, we'll just have one.
The weeding claw has previously been tested on this tractor mounted machine as shown above. Now it needs to be replicated on the WEEDINATOR, but instead of four claws working simultaneously, we'll just have one.![]() Drawings are sent off for laser cutting. Should have components back for assembly in 2 weeks time. Check out 'Claw Mechanism' zip in the files section for dwg drawings.
Drawings are sent off for laser cutting. Should have components back for assembly in 2 weeks time. Check out 'Claw Mechanism' zip in the files section for dwg drawings.The claw is powered by an ACM604V60-01 motor and is welded to a 20 mm shaft. The central plate above is bolted onto the Z axis plate (left) and has pillow bearings for the claw and an attachment plate (above) welded on for the motor. The whole claw mechanism can be quickly removed and replaced with other devices to be designed and built in the future.
WEEDINATOR 2019
The WEEDINATOR project continues .... The inevitability of robots working on farms draws ever nearer ....



 ..... And the removable sub assembly welded together:
..... And the removable sub assembly welded together:


 The weeding claw has previously been tested on this tractor mounted machine as shown above. Now it needs to be replicated on the WEEDINATOR, but instead of four claws working simultaneously, we'll just have one.
The weeding claw has previously been tested on this tractor mounted machine as shown above. Now it needs to be replicated on the WEEDINATOR, but instead of four claws working simultaneously, we'll just have one.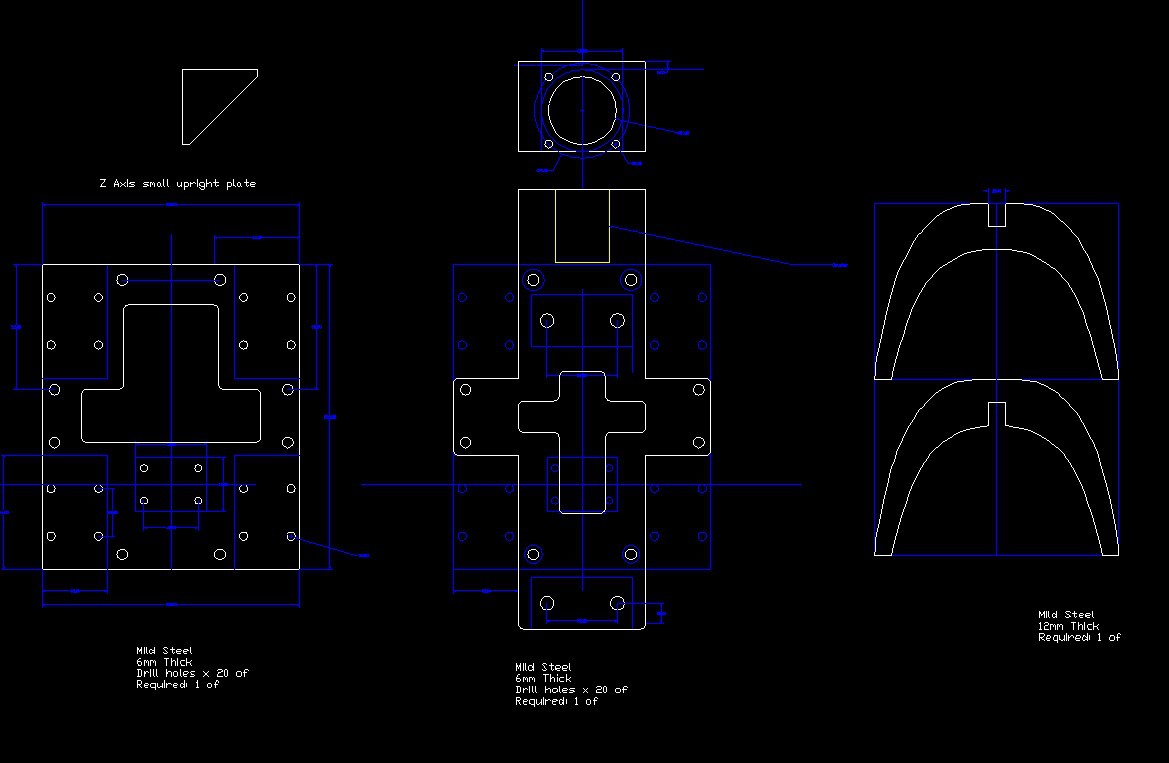 Drawings are sent off for laser cutting. Should have components back for assembly in 2 weeks time. Check out 'Claw Mechanism' zip in the files section for dwg drawings.
Drawings are sent off for laser cutting. Should have components back for assembly in 2 weeks time. Check out 'Claw Mechanism' zip in the files section for dwg drawings.