Antonio Regueira
Antonio Regueira-
Project finished
12/11/2016 at 22:50 • 0 commentsHello!
This is it. The last entry I will make on the D.I.M.E.R mk1 project. A couple of weeks ago I started thinking about the design of the second version, at the moment mk2, more powerful, bigger, more precise and totally replicable so that anyone can build it. As soon as i design something i will publish it here.
I dont want to closed this project without uploading some videos, in the first one i programmed some movements, the second is from another perspective and the third is about the detail of the gears, I hope you like them.
See you soon!
-
New Assembly
11/07/2016 at 22:43 • 0 commentsHi everyone!
In the last post commented on a new assembly for the elbow, I had to make a couple of adjustments but it works well.
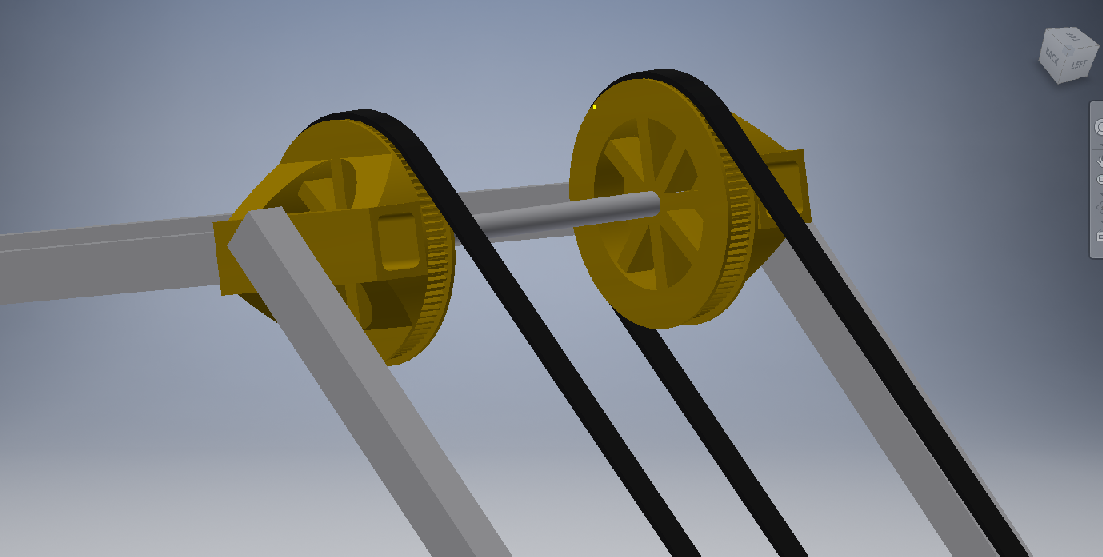
To make the movement I had thought of gt2 belts, but when I had the assembly finished, making tests of efforts, I had to tighten the belt so much that it broke, so I chose to use special strings that yield nothing.
![]()
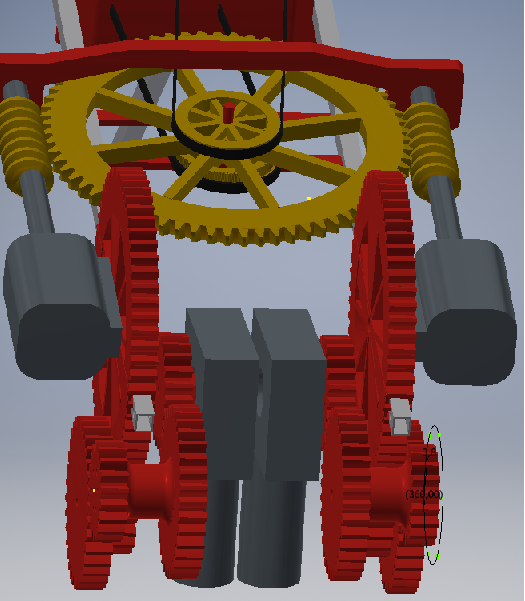
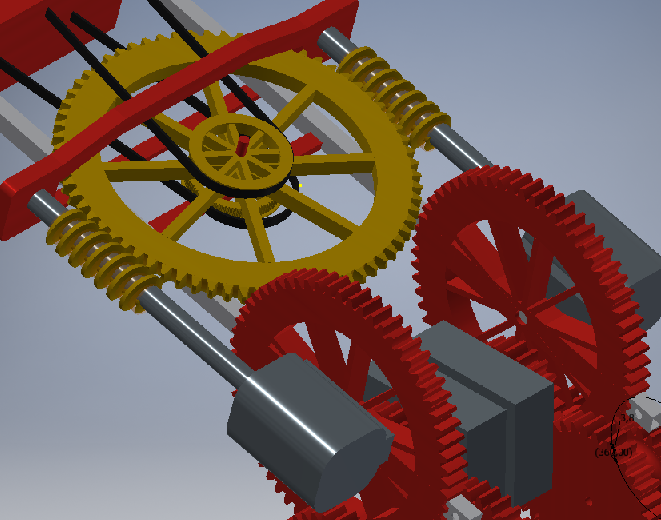
In the shoulder gear system, I modified the wheel where the aluminum profiles are hooked, so the shoulder can rise by 230º, improving the range and maneuverability. I also had to place a series of plates to join the 3 axles of the gear train so that in no case they can be released.
![]()
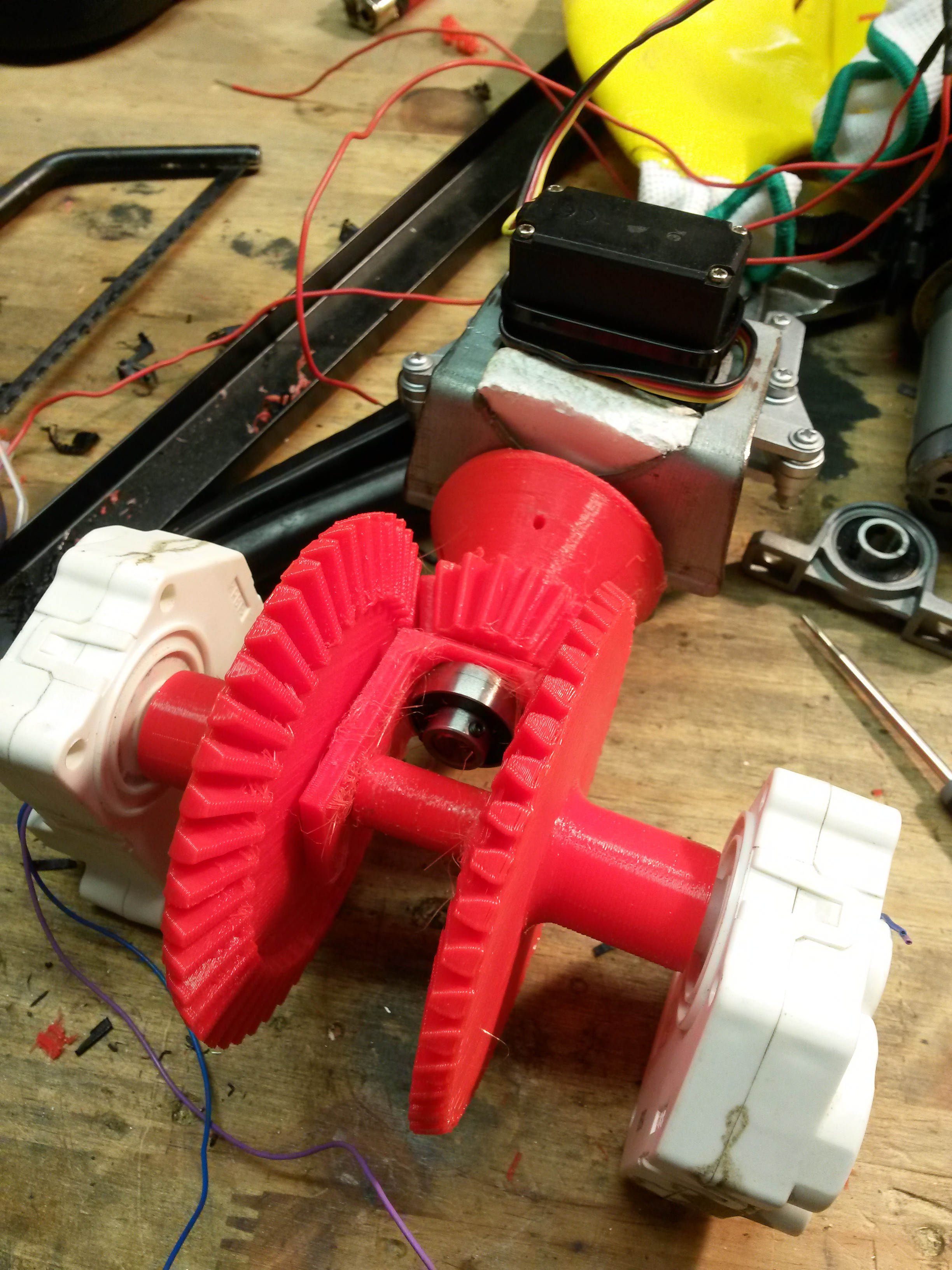
Finally I modified the whole wrist, now uses a semi-differential system so that, with only two DC motors, I can rotate as well as up and down, this design I owe it to the project Thor, by the maker Angel Larrañaga. Motors are recycled from an office printer, these have a speed of 2 RPM, because of this I made a multiplier of 3.5 so that they moved a little faster, as the gears are made in plastic it couldn't hold the weight of 2 KG so i put Inside an aluminum shaft of 10x10 and, inside of this, an 8 mm shaft of steel
![]()
As always, new built, new video, here the last one.
Enjoy it, see you soon!
-
More power and accuracy
08/20/2016 at 00:52 • 0 commentsHey everyone!
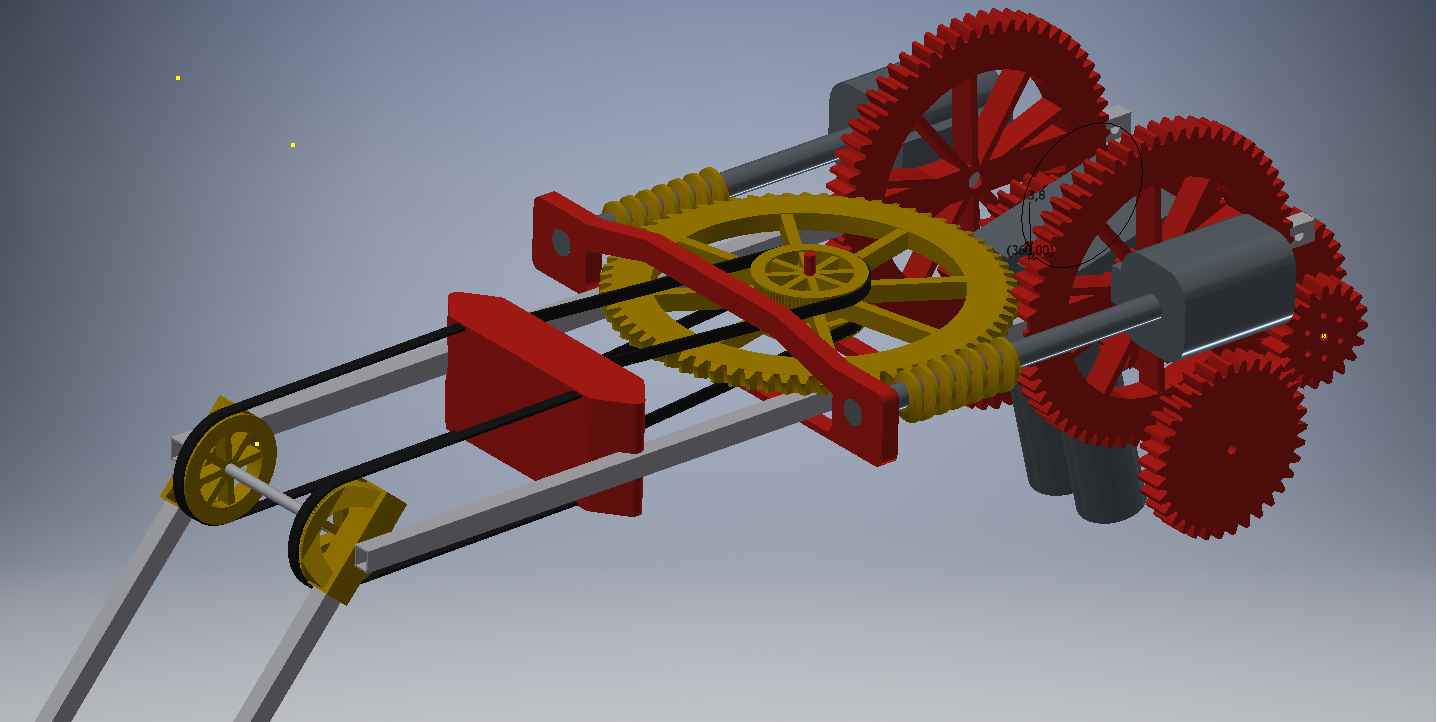
I've been working with gears and designing new ways of movement.
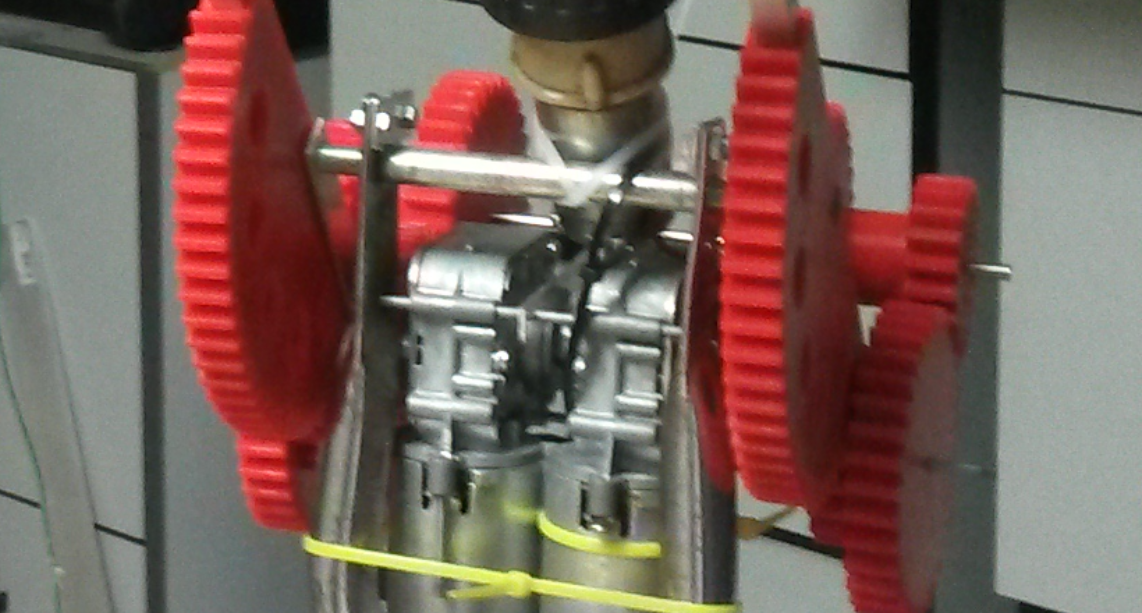
First of all i added another motor to the shoulder movement, so now, there are 2 identical motors moving this part.
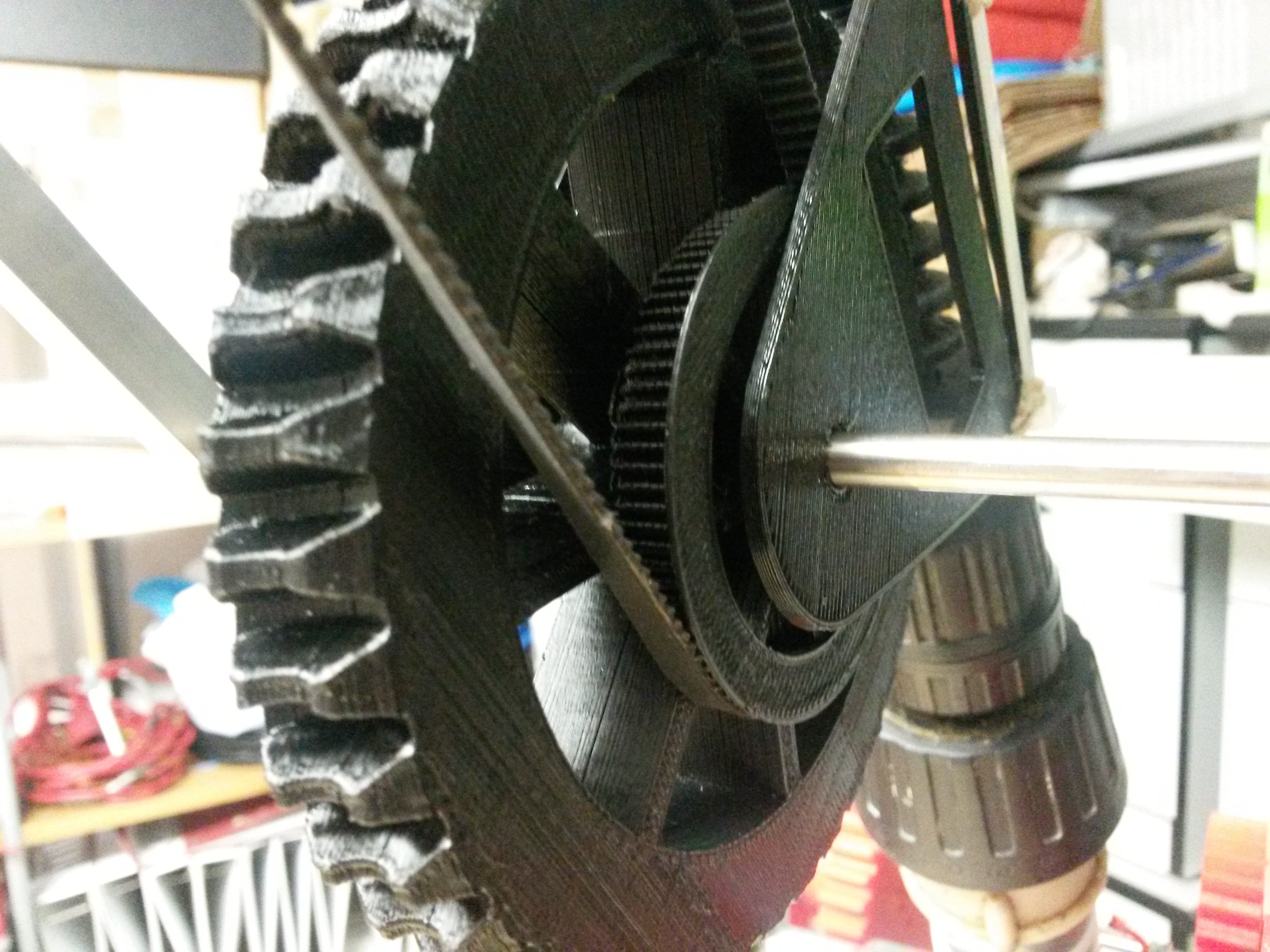
Second, i changed the motor of the elbow, now there are 2 motor of old drills and, with a worm gear and a belt it's moves perfectly.
i couldn't make this real because i stayed without PLA and i couldn't print all the parts but i have photos of some parts and the entire design in CAD.
One important fact is that i tested the new assembly of the shoulder and i can pick up 2 KG at 2,5 meters of distance, that it's a lot of efforts and the gears work fine :) you can see this test before the pictures.
Because of this, i improved the movement of the shoulder and now it can rotate 330 degrees at this axis.
Probably in 1 or 2 weeks i will print this new assembly and make a video working and moving.
I reccomend seeing all the following pictures and if you have any question or comments please, let me know ;)
I upload this entire CAD file so you can download.
See you soon!
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
-
Gears
07/03/2016 at 09:24 • 0 commentsHi everyone!
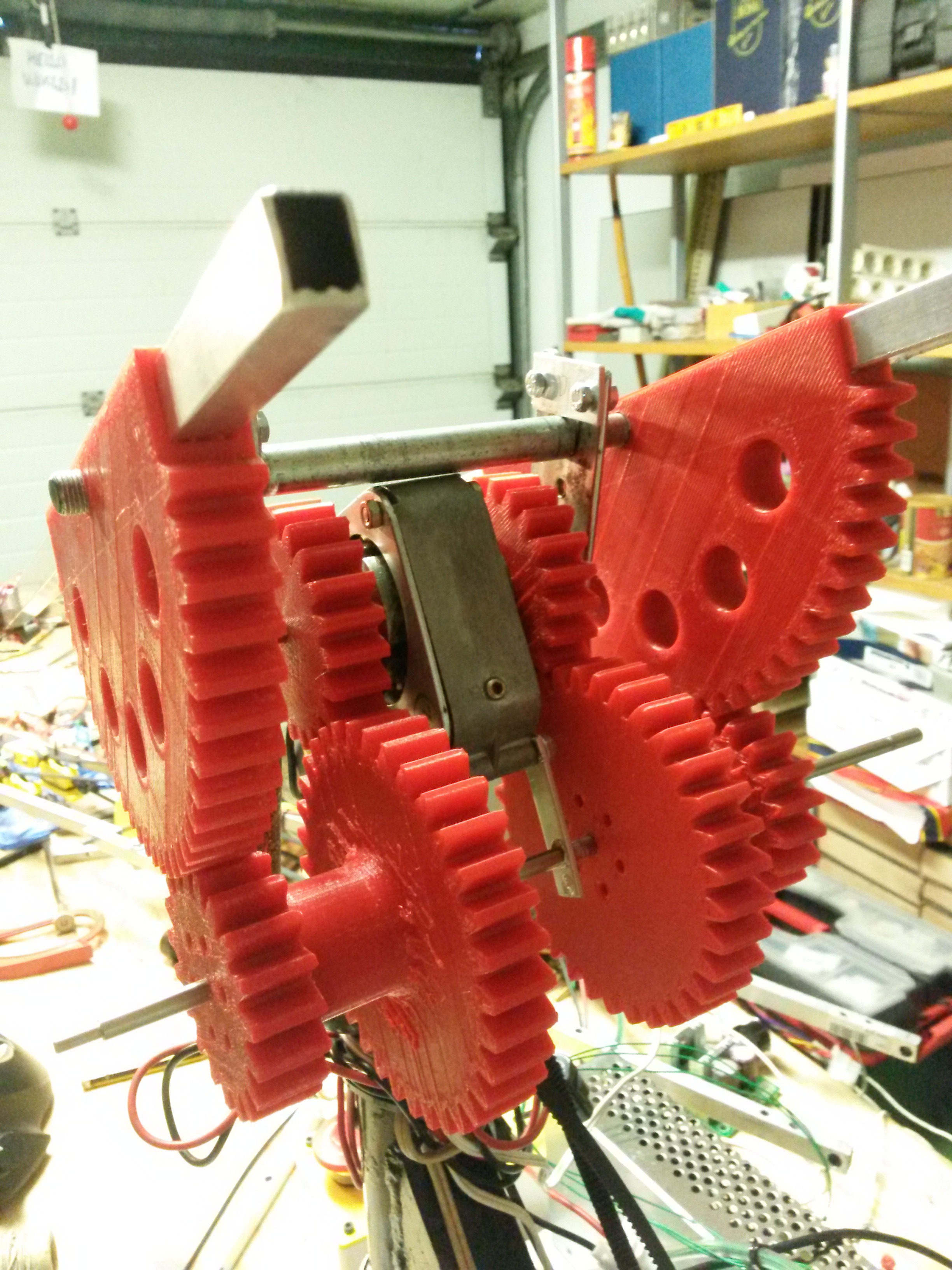
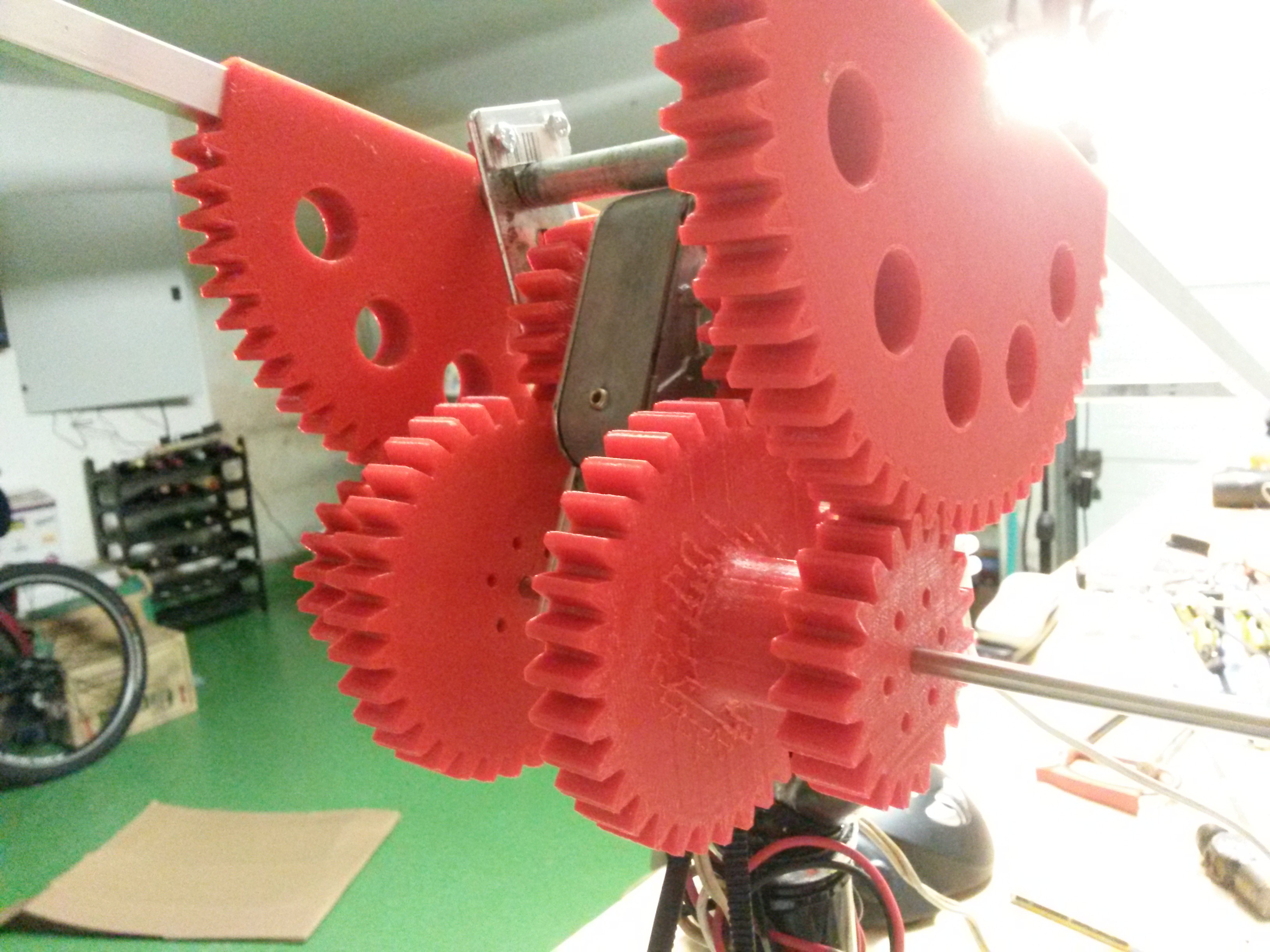
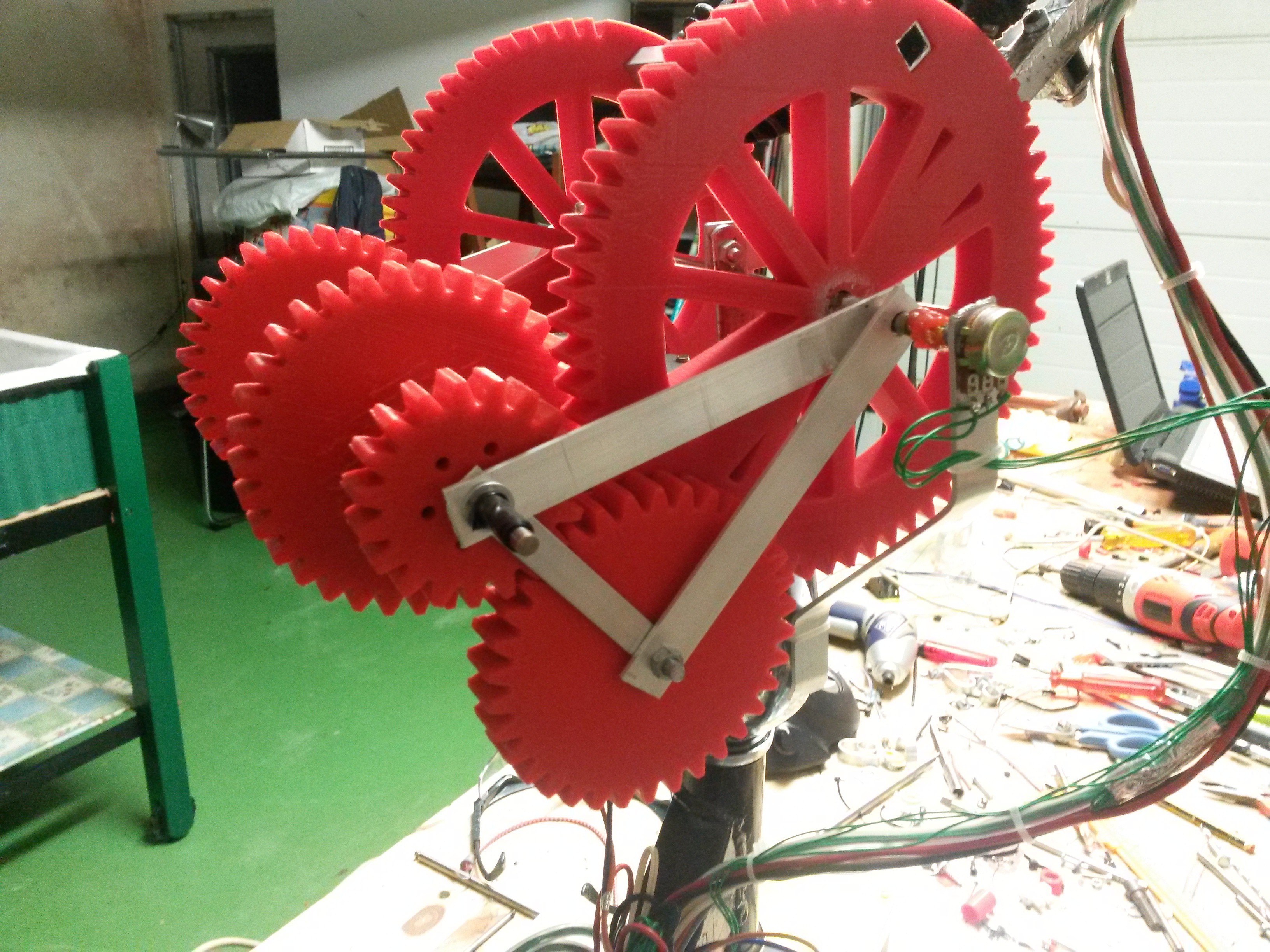
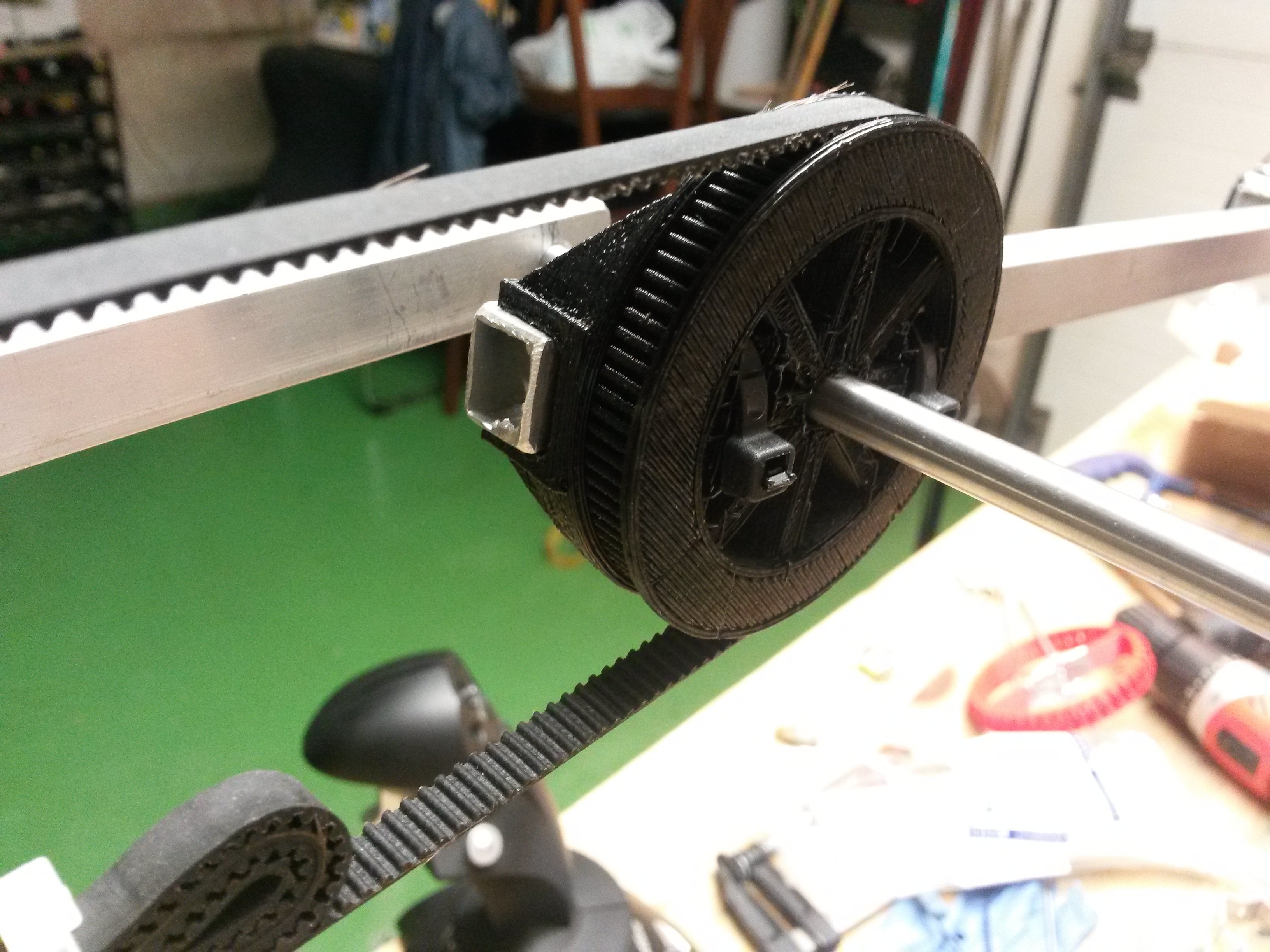
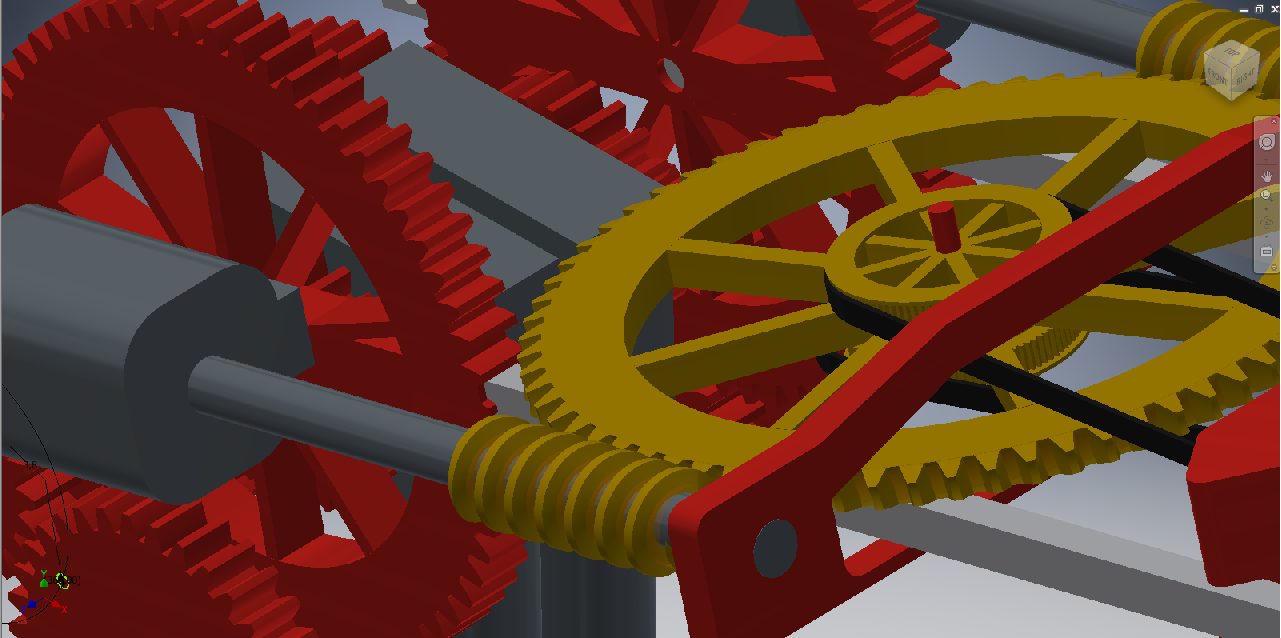
In the previous post i improved accuracy addi
![20160703_102539]() ng a belt to the shoulder and it worked fine, but this way I couldn't apply force to both direcctions, so I decided to make a printed gears.
ng a belt to the shoulder and it worked fine, but this way I couldn't apply force to both direcctions, so I decided to make a printed gears.
After design and some quick calculation this is the result. In fact this new assembly make posible that the arm can be dismounted by removing the two pieces that are above the axis to transport it easier.
![]()
![]()
Here's a video of how they work:
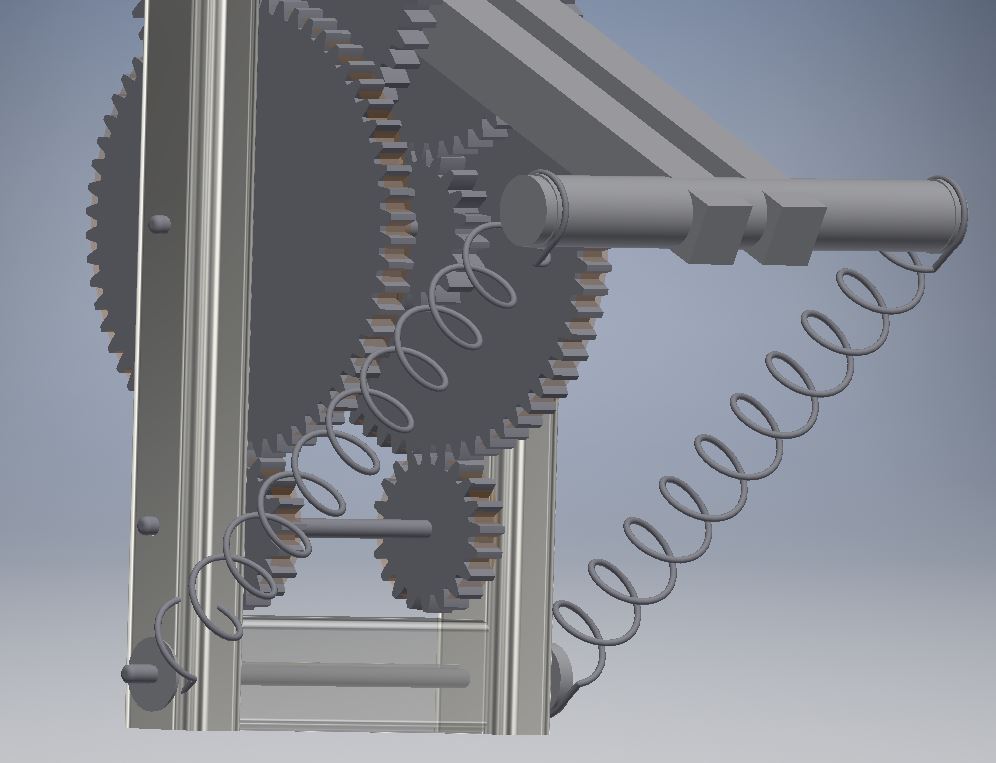
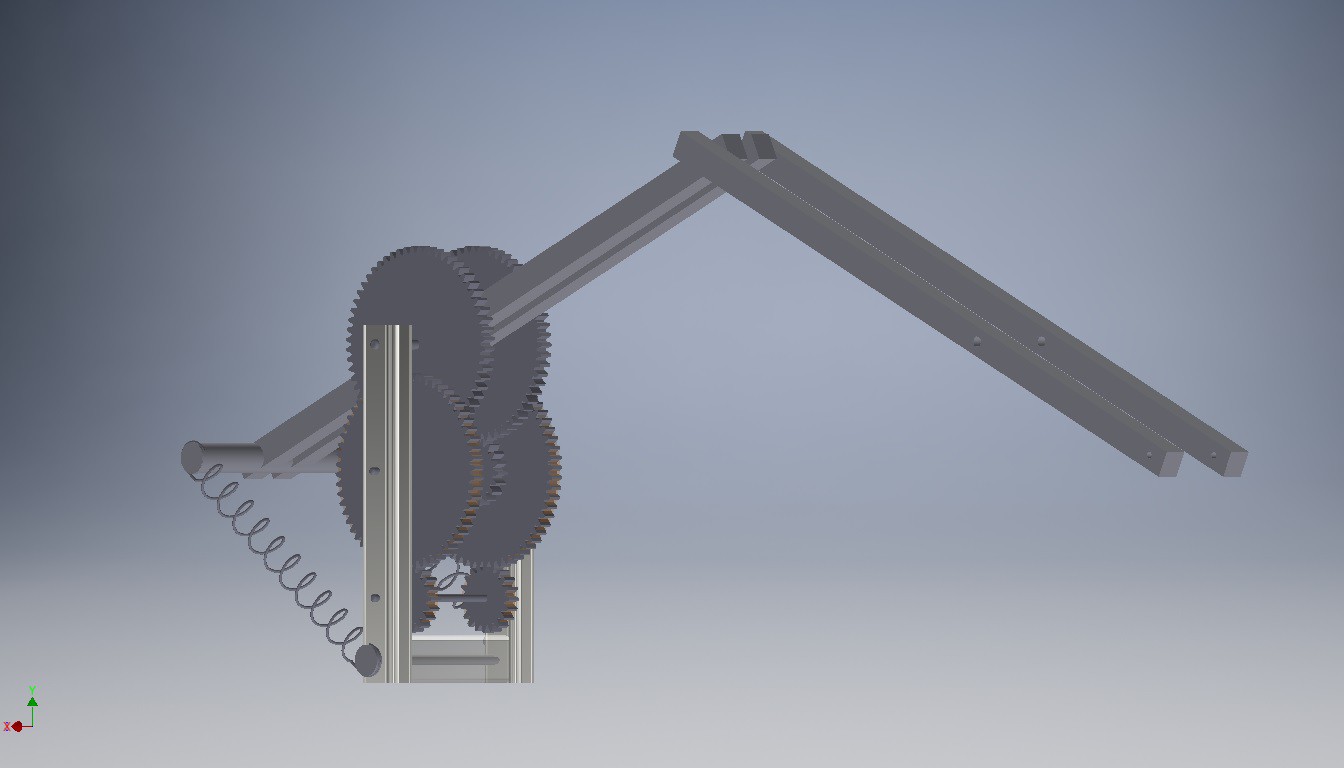
Now I'm thinking about how to add a spring to help to lift the arm, it would be something like the following image.
See you soon!
![DIMER4]()
-
Improving efficiency
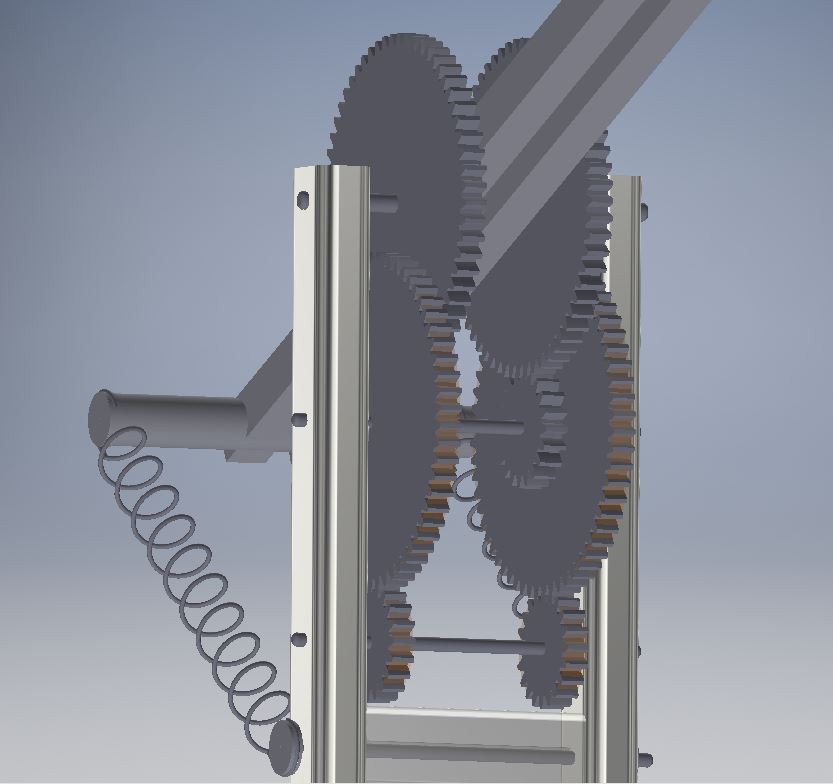
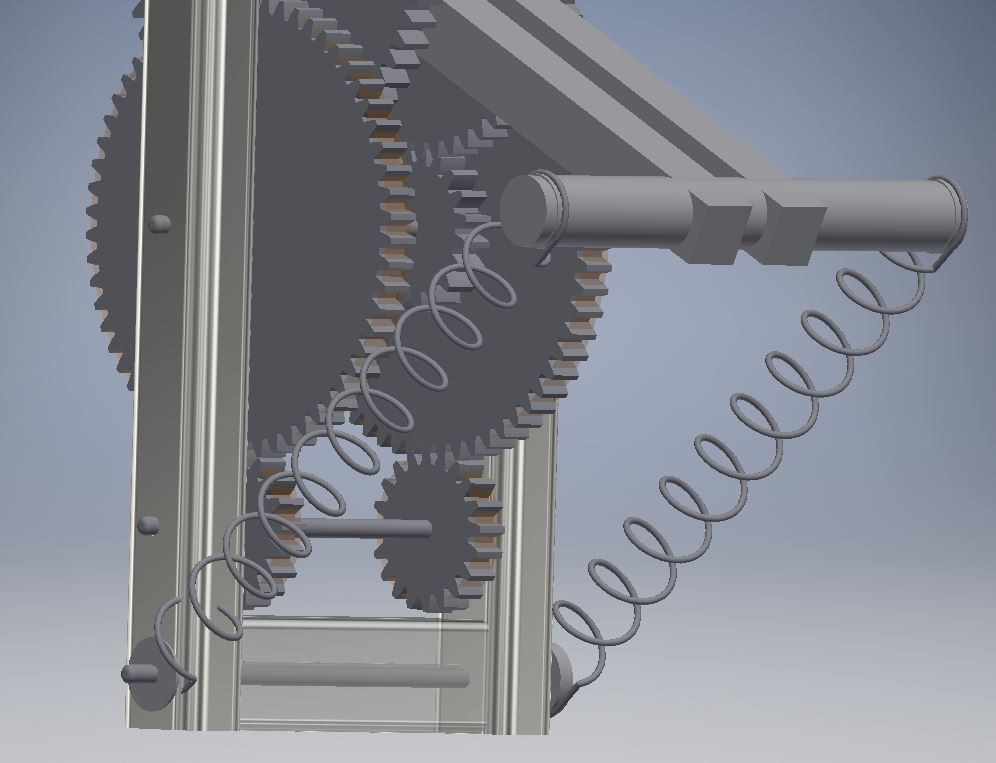
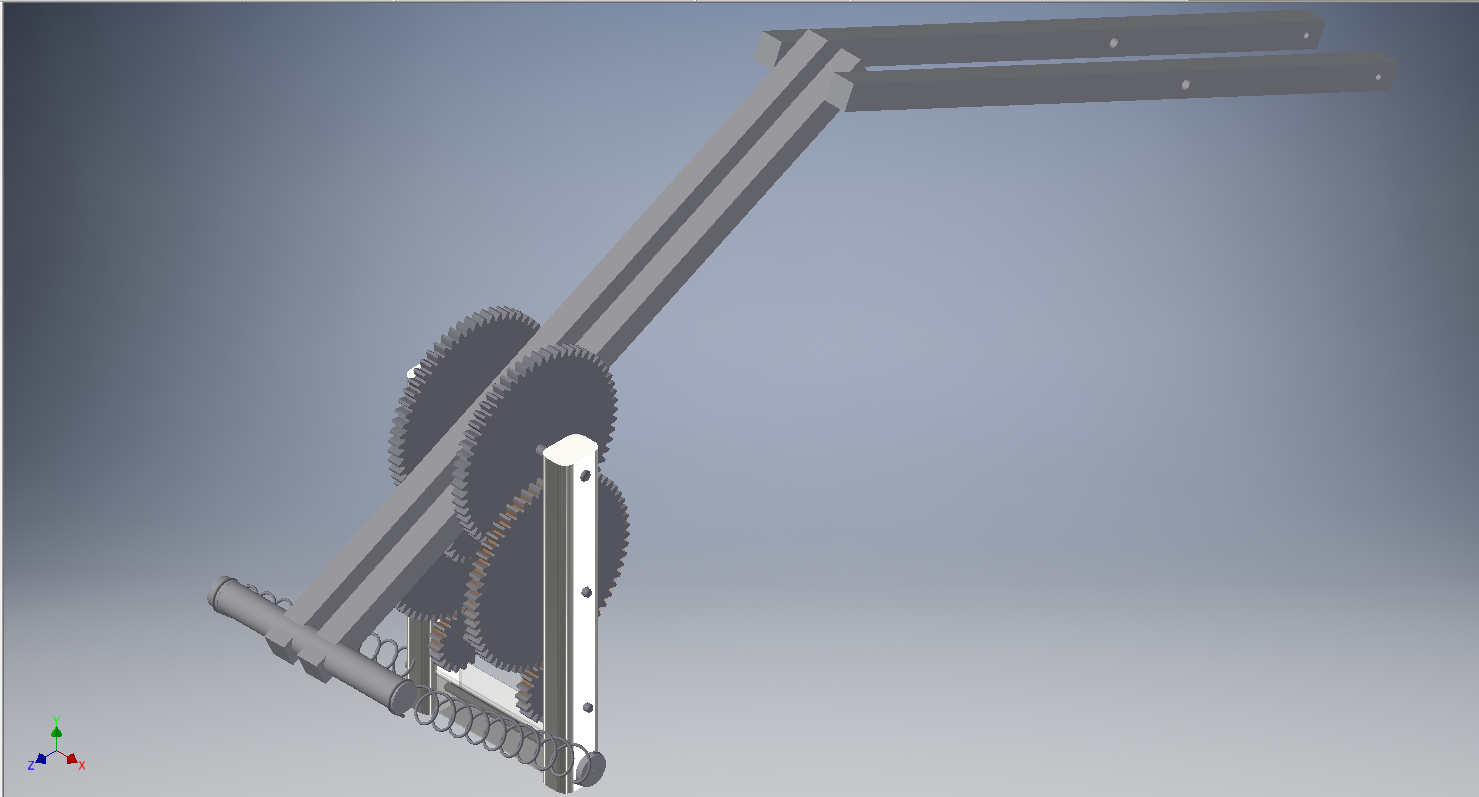
05/28/2016 at 22:07 • 0 commentsHi everyone, last weeks i thought about improving accuracy on the arm, one friend told me about putting springs so i read about this and it's a very good idea, putting some springs, motors needn't to work so hard, and can pick up more weight. i tried to make some skeches. It's only an idea and not the final result. what do you think about this? the motor would connect with the lowest gears with a gear ratio of 1/9.
And with this gears i can make force in both of direction, not only elevating.
I uploaded the file to my repository if you want it.
See you soon!
![]()
![]()
![]()
![]()
-
more precision on the wrist and the claw
04/26/2016 at 23:38 • 0 commentsNow that the shoulder has more precision i need to improve the wrist and the claw, Because i saw that when i did some fast movements it quake a lot.
By other hand i need to do a software where velocity increase and decrease so movements will be more fluid
-
Improve accuracy
04/23/2016 at 17:20 • 0 commentsOn previous video you can see that the accuracy is very poor, so i'm working now on it.
I think that the problems is the shoulder (becasue i use ropes to transmit motion).
I need to change it to gt belt and improve the movement of the motor shaft.
[25-4-16] i changed ropes to belts and added a new spindle. you can see the explain at the instructions.
-
Programmed movements
04/23/2016 at 16:09 • 0 commentsNow i need to program movements to do repetitive movements, i made this at march 2th
-
Move
04/23/2016 at 16:05 • 0 commentsFirst log was to move all axis, i made this at november 7th
D.I.M.E.R PROJECT 6 DOF Robot Arm
This is my robot arm, with recycled materials, can pick 2 Kg and costs around 100$


 ng a belt to the shoulder and it worked fine, but this way I couldn't apply force to both direcctions, so I decided to make a printed gears.
ng a belt to the shoulder and it worked fine, but this way I couldn't apply force to both direcctions, so I decided to make a printed gears.