 kelvinA
kelvinANavigation
The title tag system is explained here, and the table is updated when a change occurs. Notable logs have bold L# text.
Preface
[Nov 27]
I've tried a Let's Split keyboard. I've tried a WK-50 keyboard. I want to try a Svalboard but it's not cheap nor portable enough to use anywhere but on a desk or affixed to an armchair.
My efforts developing #Tetent [gd0090] advance at a glacial pace. Thus, I'm still using my (not so temporary) "temporary" Z-88 (typewriter style) keyboard I bought 3 years ago. Furthermore, there's still a lot more typing/programming I need to do between now and [insert time when Tetent exists]. There's now a very wide feature gap between Tetent and a split mechanical keyboard, so there must be some kind of stopgap solution that can slot in-between.
Looking through keyboard images on the internet, I don't think I'm going to get a user experience much different to what I've already tried and used; it's essentially the same keys just rearranged slightly differently if the designer was feeling daring, or just a different colour/shape on the keycaps of the tried-and-true QWERTY stagger if not. Basically, I look at a keyboard, look at my nails, look at my to-do list and think "Mn, probably not going to pad out.".
Then I remembered the passing thought I had while browsing the DataHand / Svalboard discord around February time:
I wonder when someone will try to make a "poor man's" DataHand using microswitches.
I also still want to learn Tetaip -- the layout I formulated during #WK-50 Trackball Keyboard -- as a bit of a hobby. With twice the switches, I think I could formulate a layout that enters twice the characters per chord, hence the name "Tetwice".
I've also somewhat sold myself on that "digital nomad" lifestyle, and Britain has some rather nice weather that is overshadowed by 10C temperatures.
Due to all this, I've now started researching into this project.
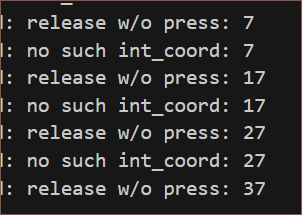
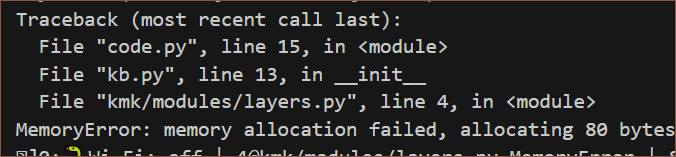
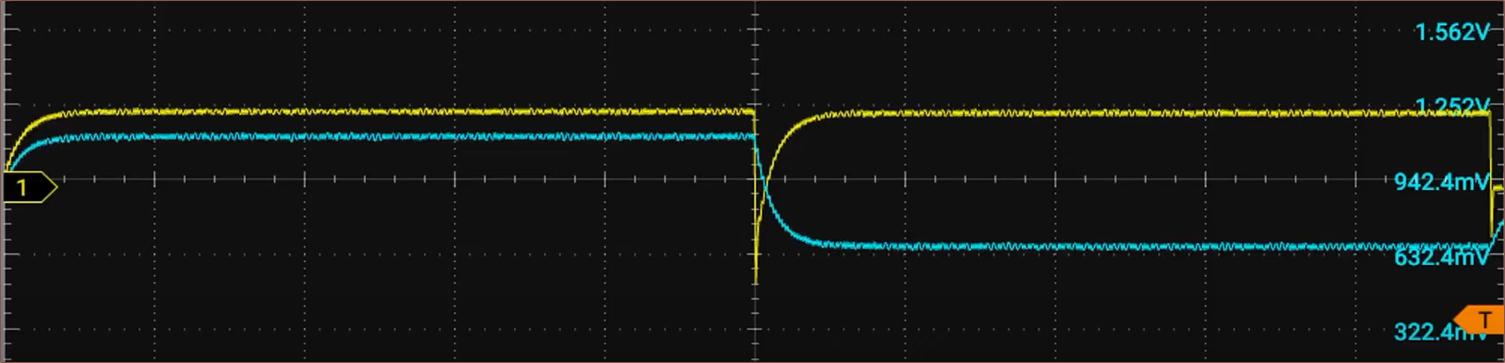
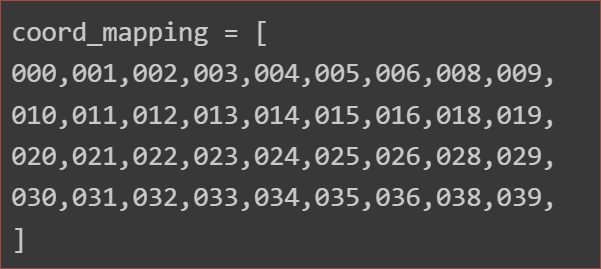 So I disabled the pins from the map and checked them:
So I disabled the pins from the map and checked them:
 It just sounds like double sided isn't a need-to-have and would just make desoldering mistakes harder, so I went to design using the single-sided version. After about 4 hours, this is what I've got:
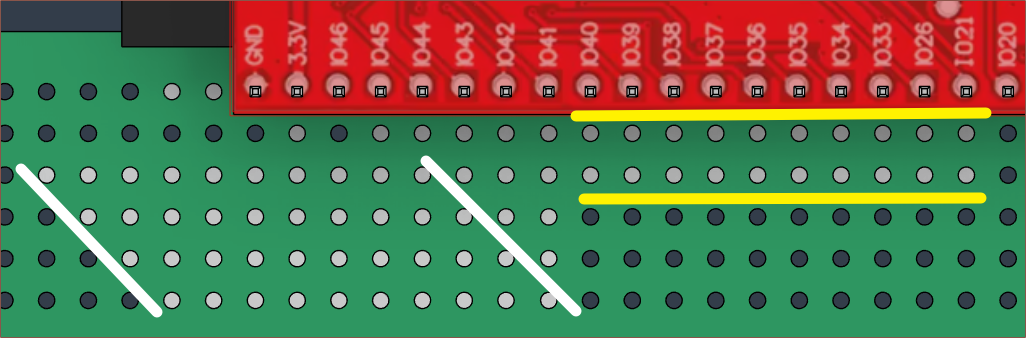
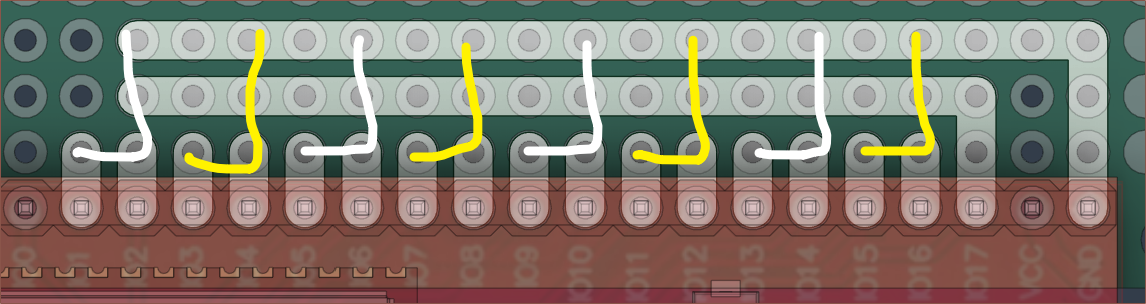
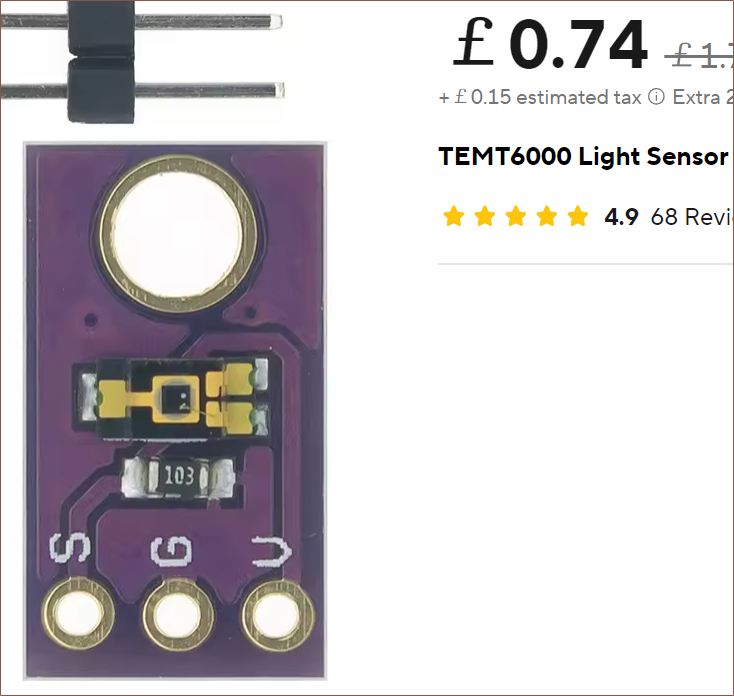
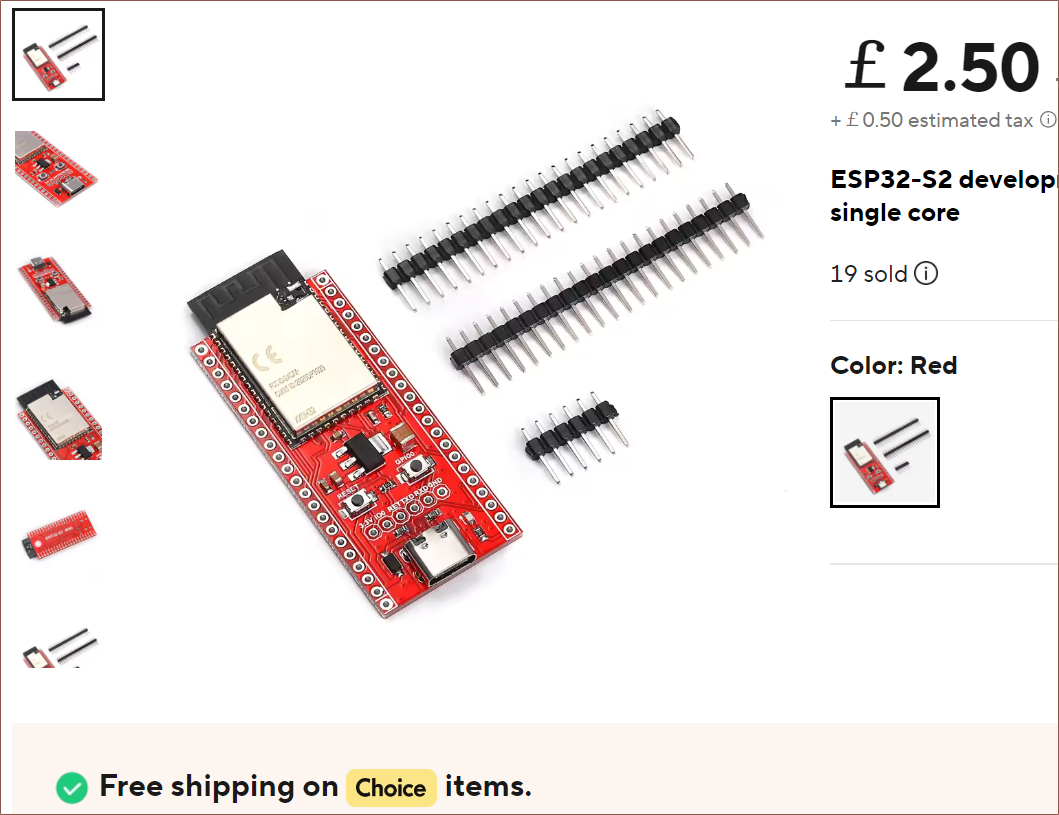
It just sounds like double sided isn't a need-to-have and would just make desoldering mistakes harder, so I went to design using the single-sided version. After about 4 hours, this is what I've got: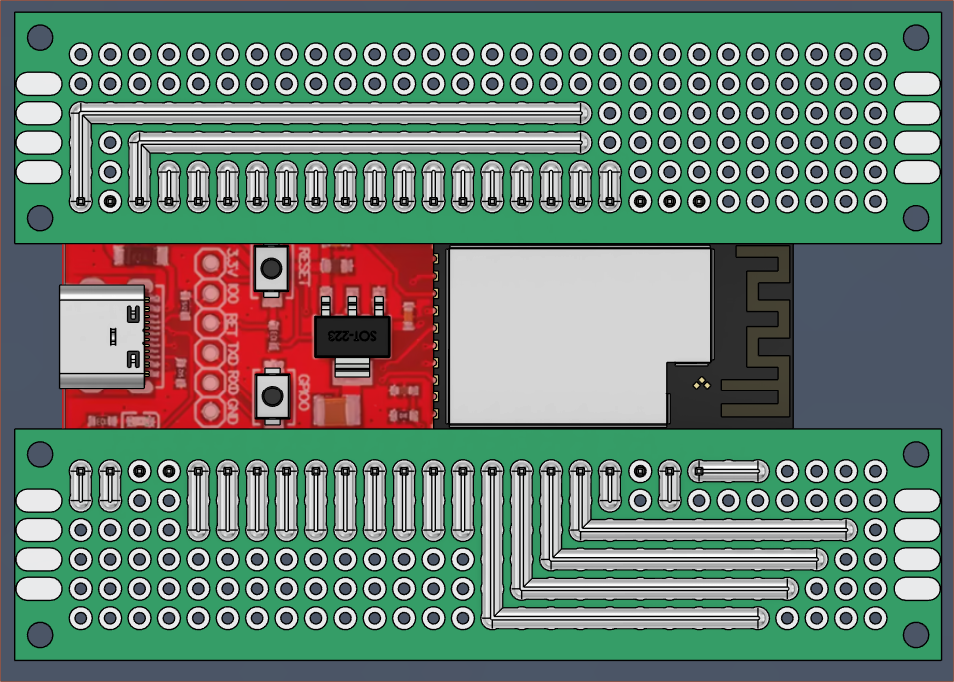 Before I went to bed, there were also some jumper wires so that I could take GPIO18 and VCC and move them closer to GPIO0 in the pursuit of bundling the RGB ring and luminance sensor in one 6-core cable, but I decided it'll be better to use GPIO45 and just strip some of the wire 50mm longer. GPIO46 is input only, so I assume I can't use it for ARGB data out. I also think the D-in of the WS2812 is high impedance so it hopefully doesn't affect the strapping function of IO45.
Before I went to bed, there were also some jumper wires so that I could take GPIO18 and VCC and move them closer to GPIO0 in the pursuit of bundling the RGB ring and luminance sensor in one 6-core cable, but I decided it'll be better to use GPIO45 and just strip some of the wire 50mm longer. GPIO46 is input only, so I assume I can't use it for ARGB data out. I also think the D-in of the WS2812 is high impedance so it hopefully doesn't affect the strapping function of IO45.
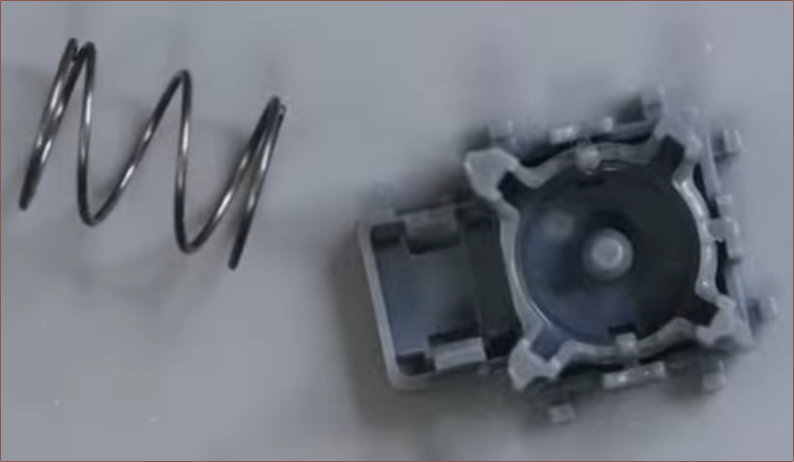



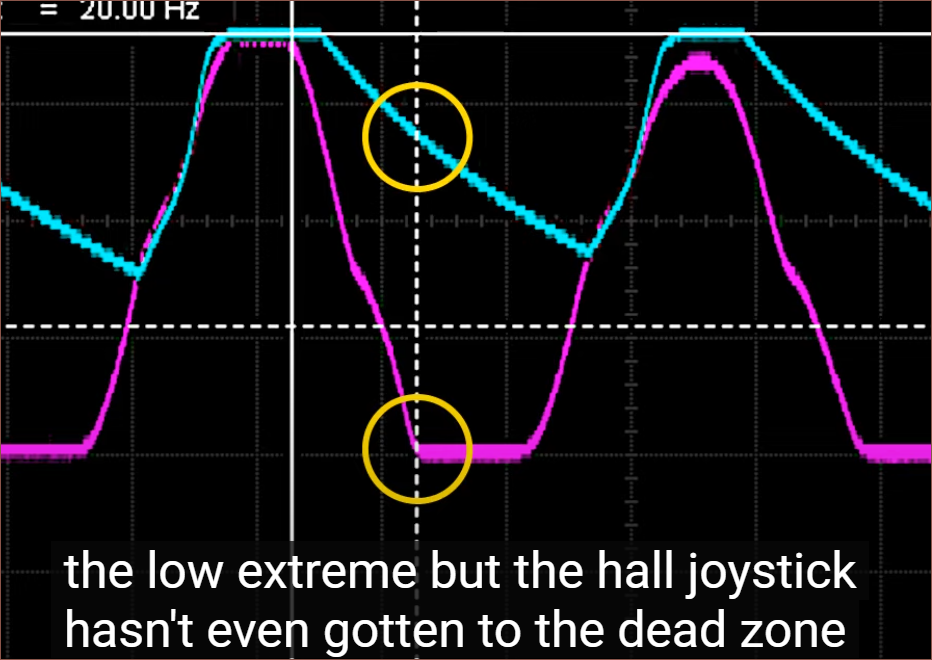
 It's a channel that has dug for details on many of the electromagnetic joysticks on the market! This log kind of serves as a TL;DW. I'll try and speedrun though the things I learned watching his tests yesterday, starting with a video where he tests these:
It's a channel that has dug for details on many of the electromagnetic joysticks on the market! This log kind of serves as a TL;DW. I'll try and speedrun though the things I learned watching his tests yesterday, starting with a video where he tests these:

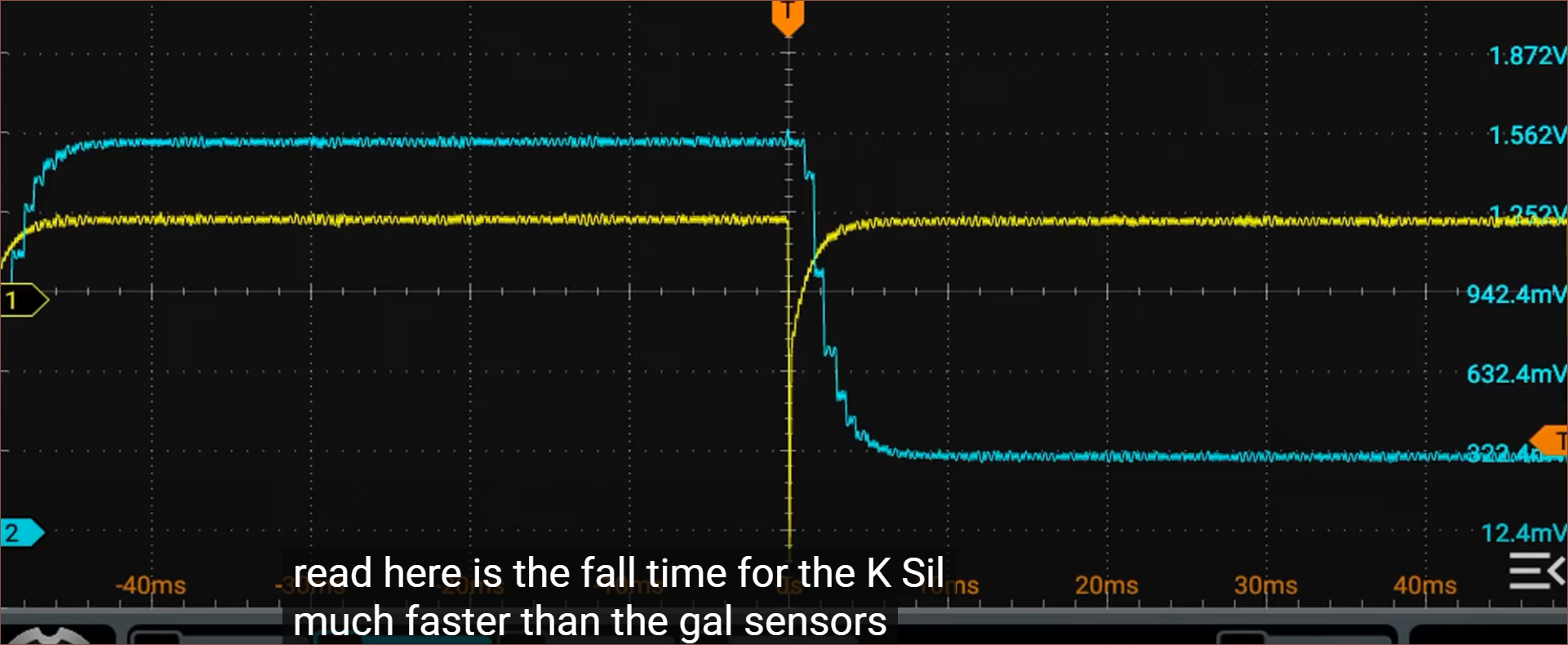
 The blues/greens are similar in price.
The blues/greens are similar in price.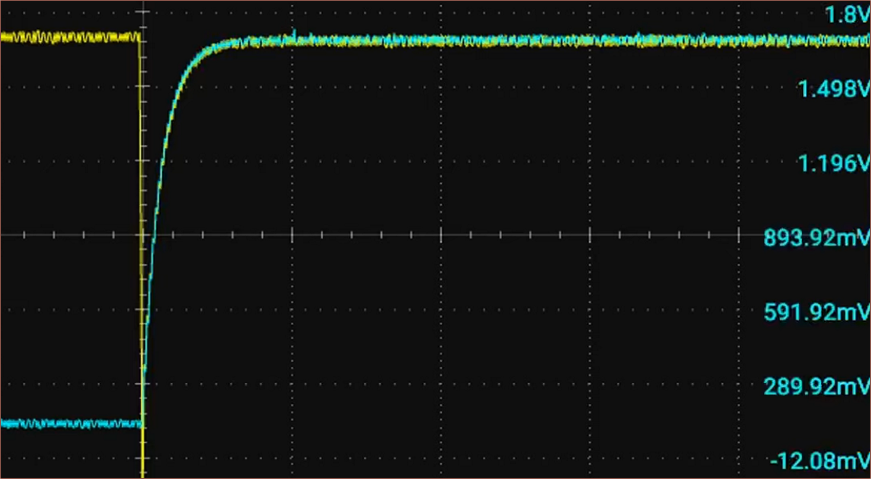 There were also the blue K-Silvers (cheapest) and black GuliKit on his channel.
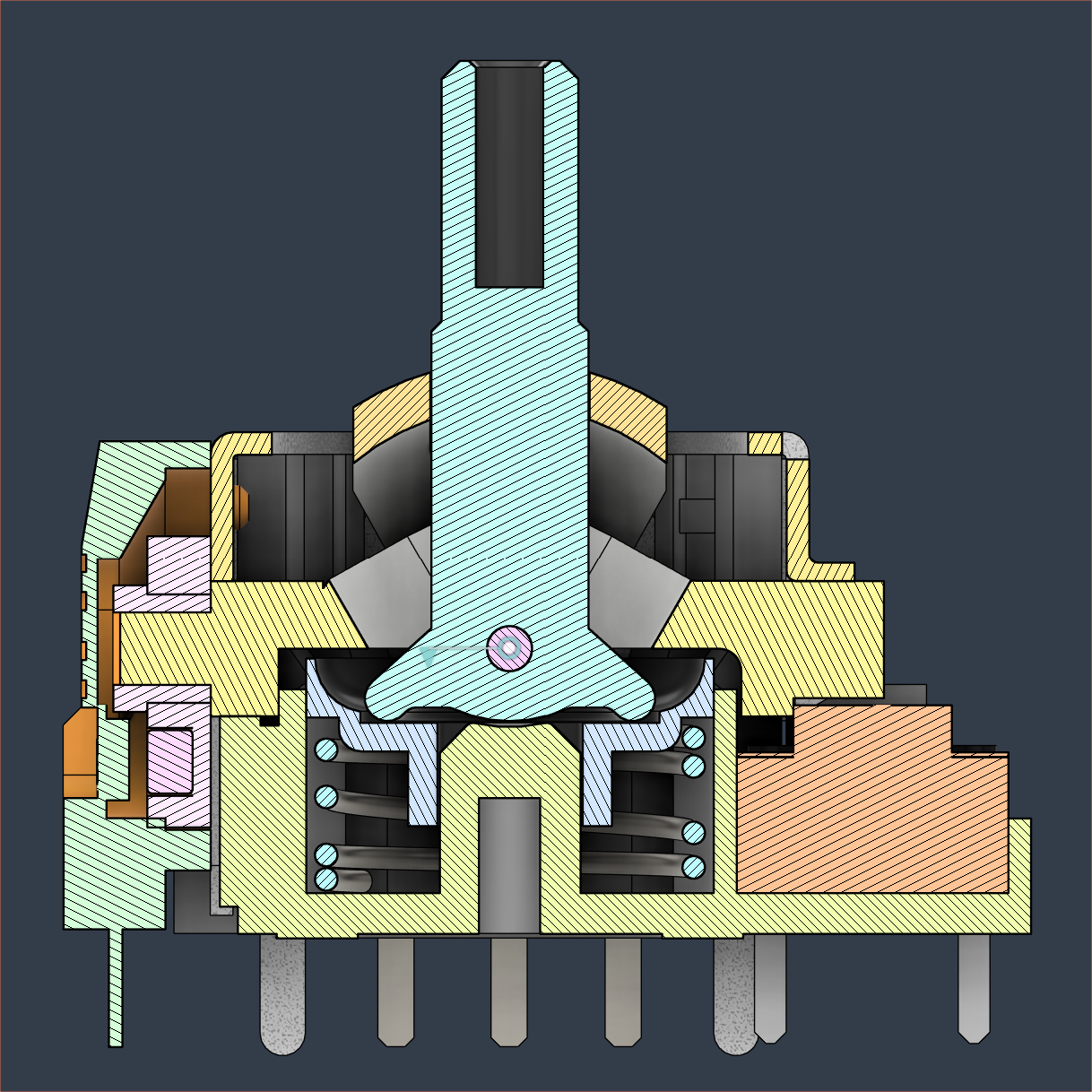
There were also the blue K-Silvers (cheapest) and black GuliKit on his channel.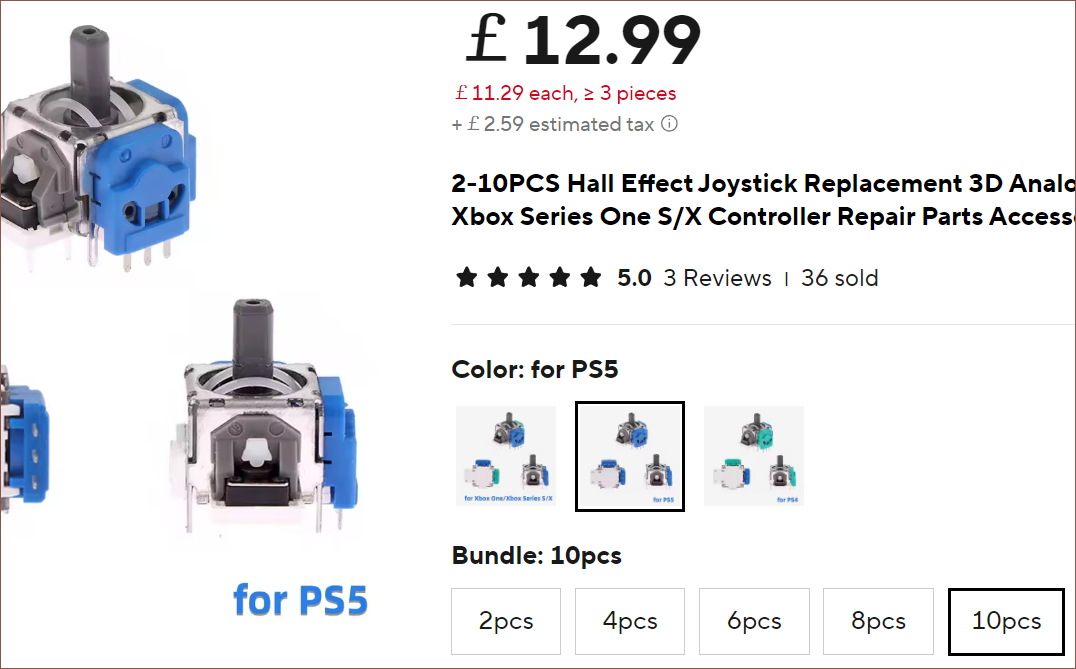 But I also noticed some translucent Ginfull TMR sticks:
But I also noticed some translucent Ginfull TMR sticks: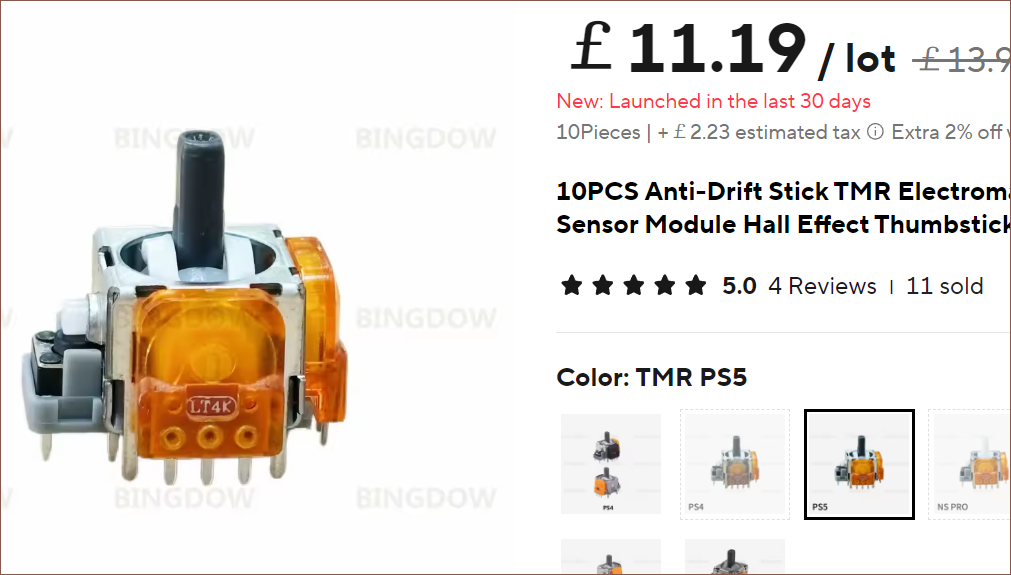 I found
I found 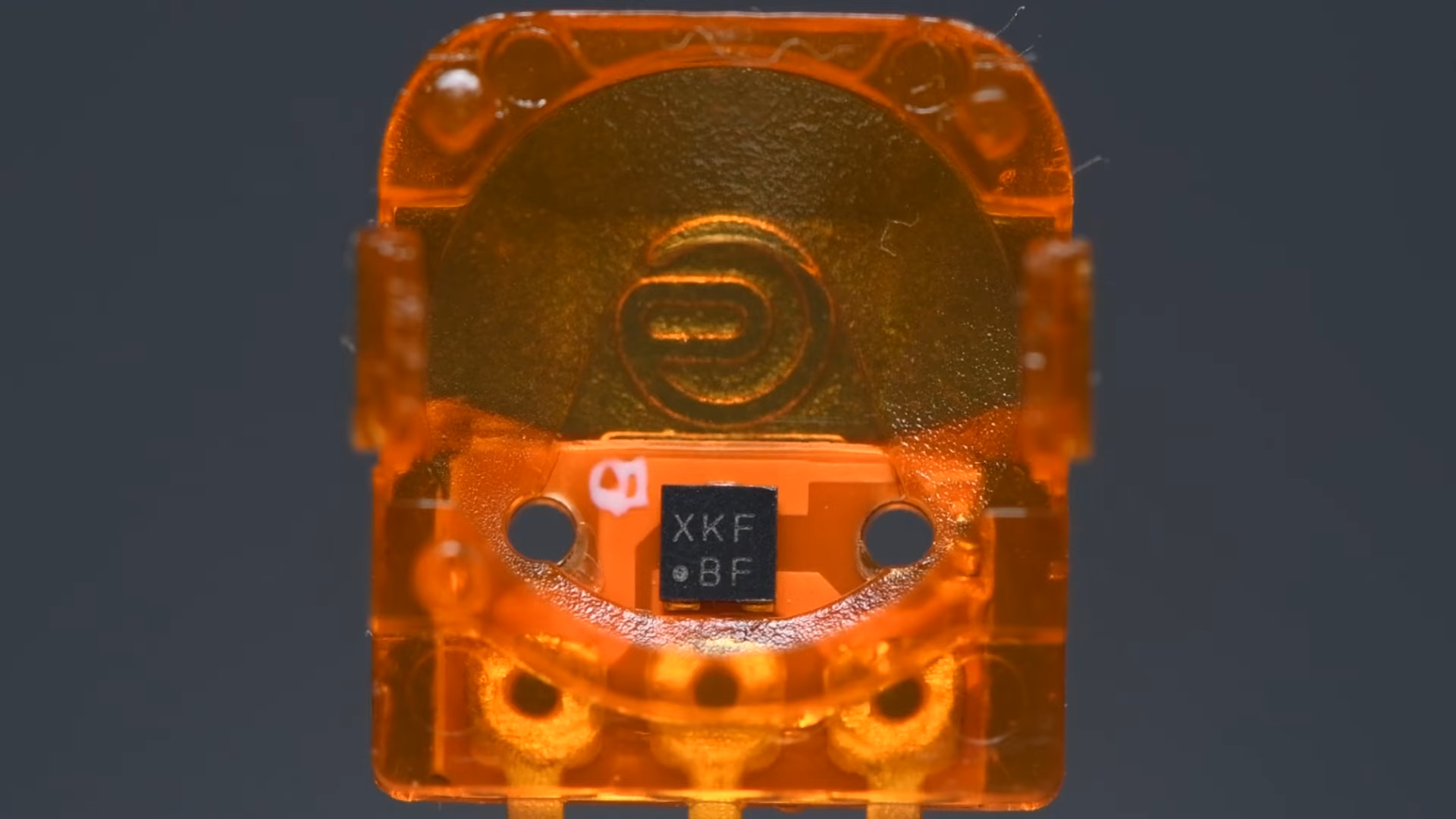


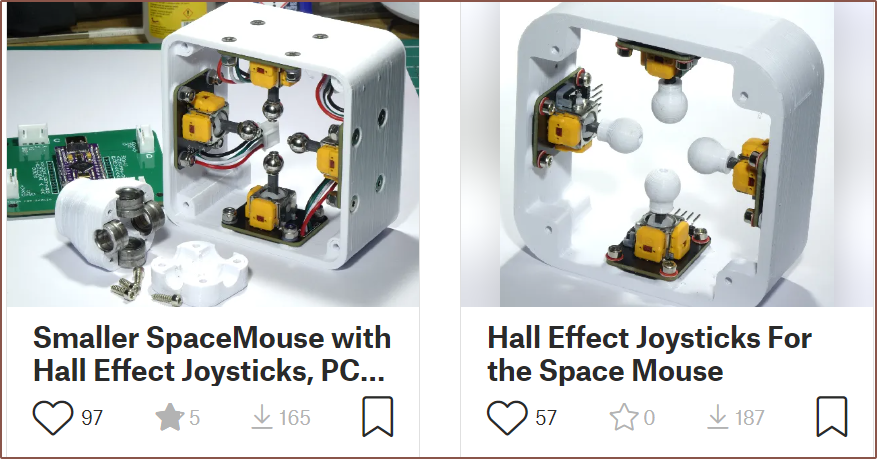
 I've been trying to rigidly fix the project goalposts, but it's hard to ignore creating a PC input device with no mouse-pointer or scrolling provisions whatsoever. Such provisions are in keyboards ranging from the most expensive to the cheapest: Svalboard, Naya Create, the WK-50 keyboard and generic wireless keyboard+trackpad combos. The below video reminded me that I really should consider something:
I've been trying to rigidly fix the project goalposts, but it's hard to ignore creating a PC input device with no mouse-pointer or scrolling provisions whatsoever. Such provisions are in keyboards ranging from the most expensive to the cheapest: Svalboard, Naya Create, the WK-50 keyboard and generic wireless keyboard+trackpad combos. The below video reminded me that I really should consider something: 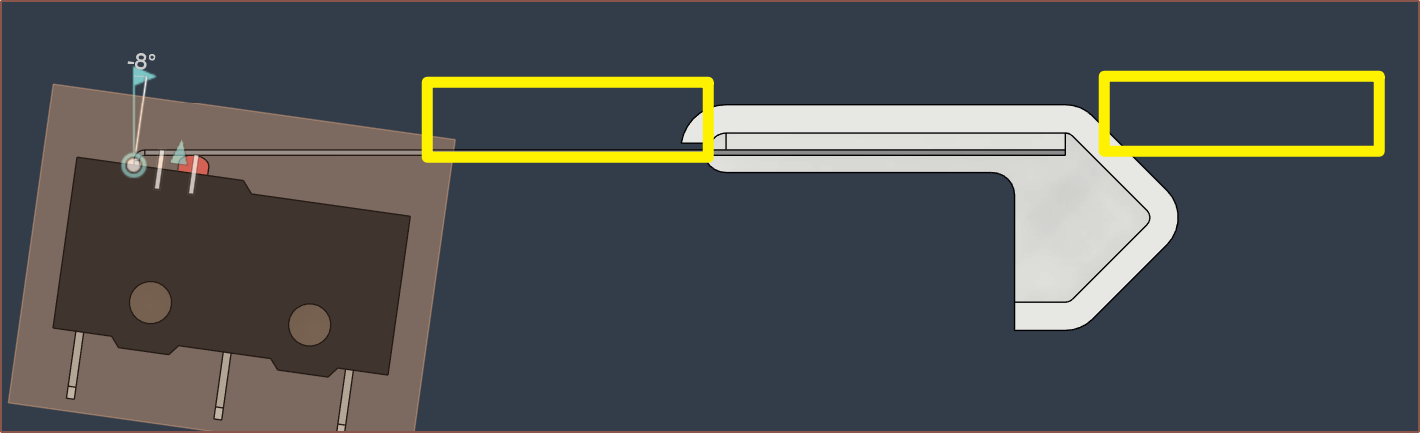 This would allow me to use a strategy like
This would allow me to use a strategy like 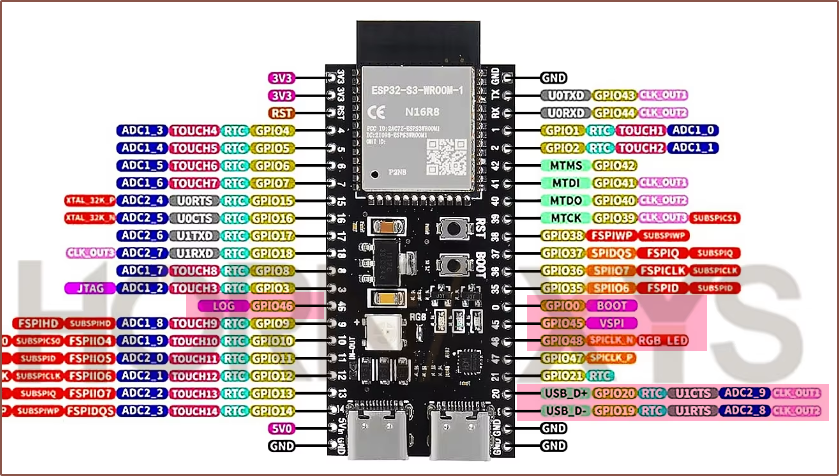
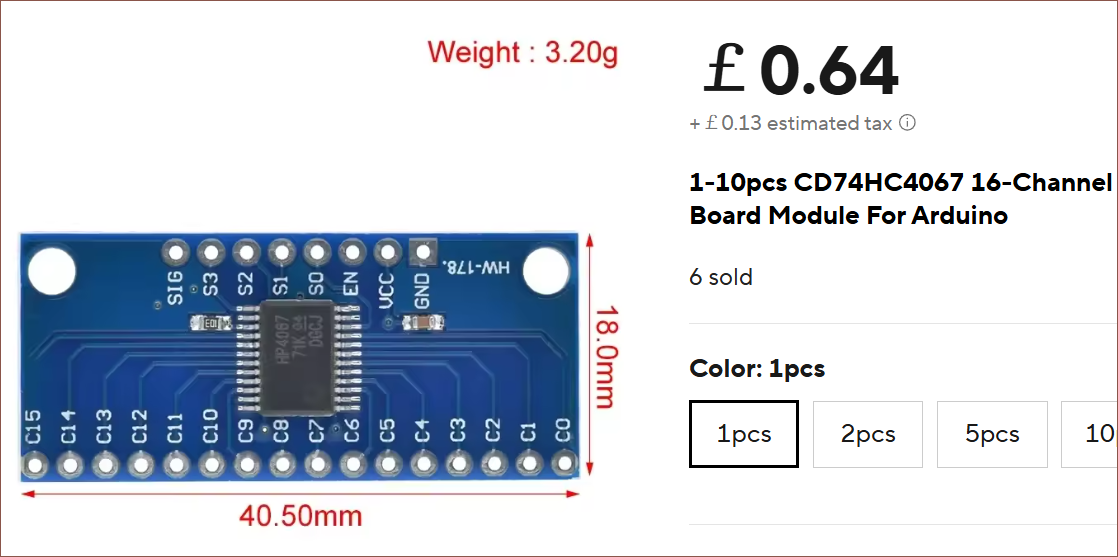
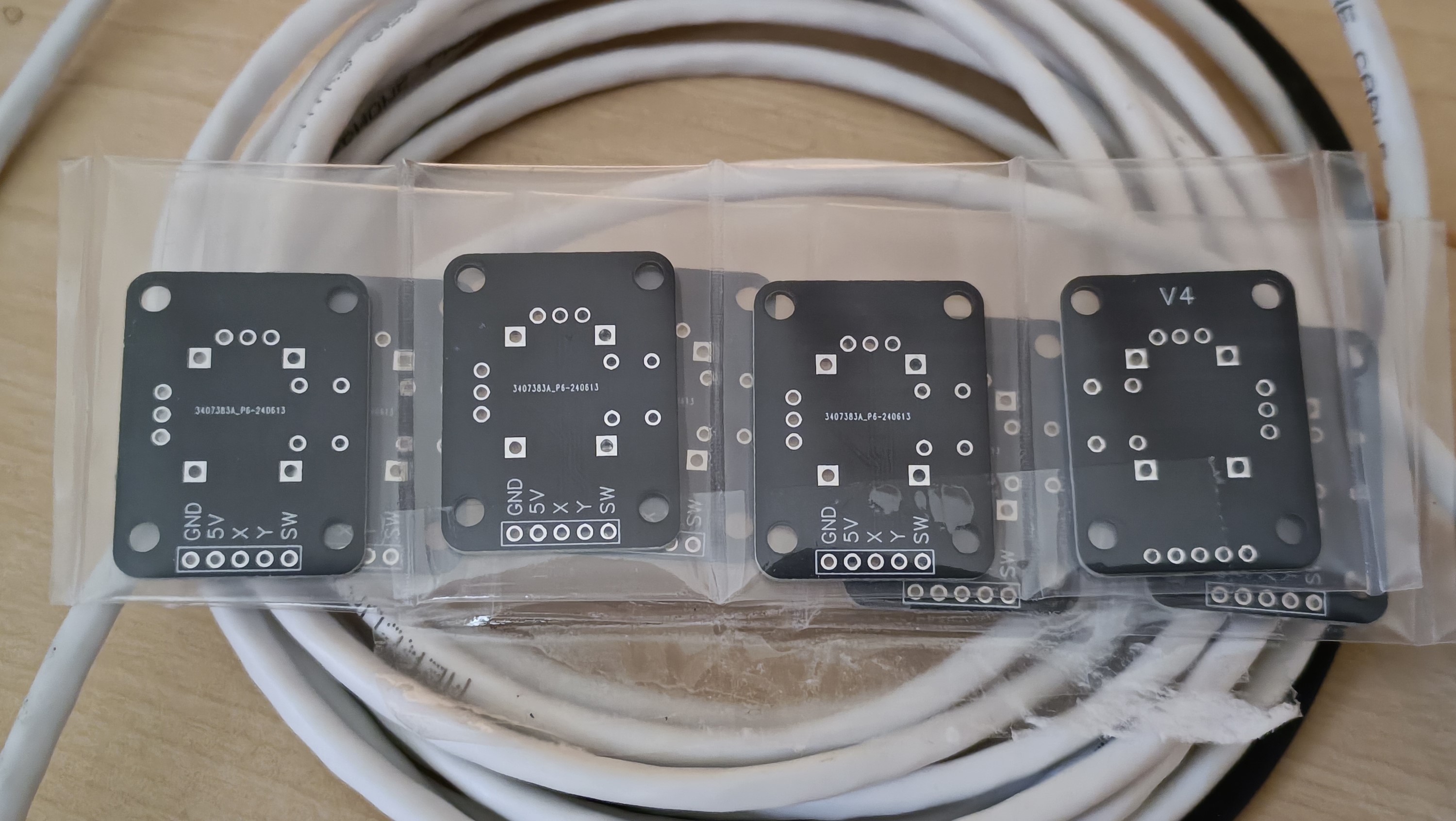
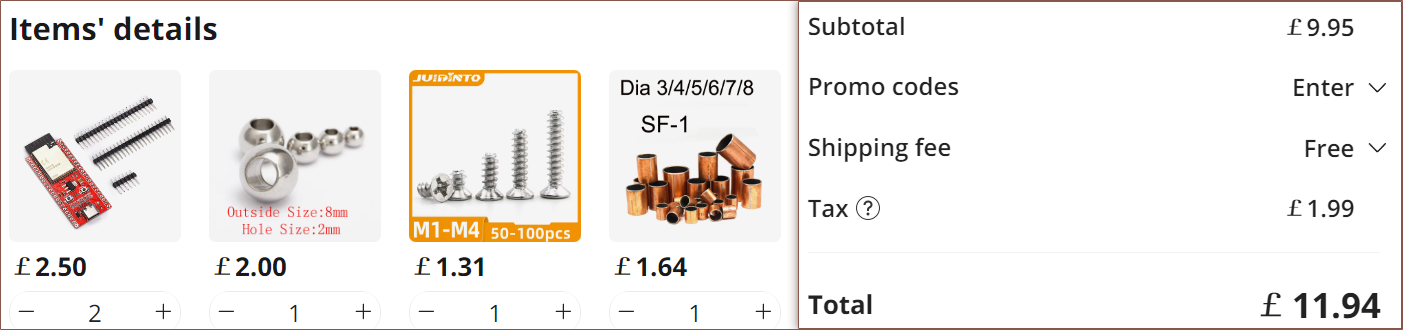
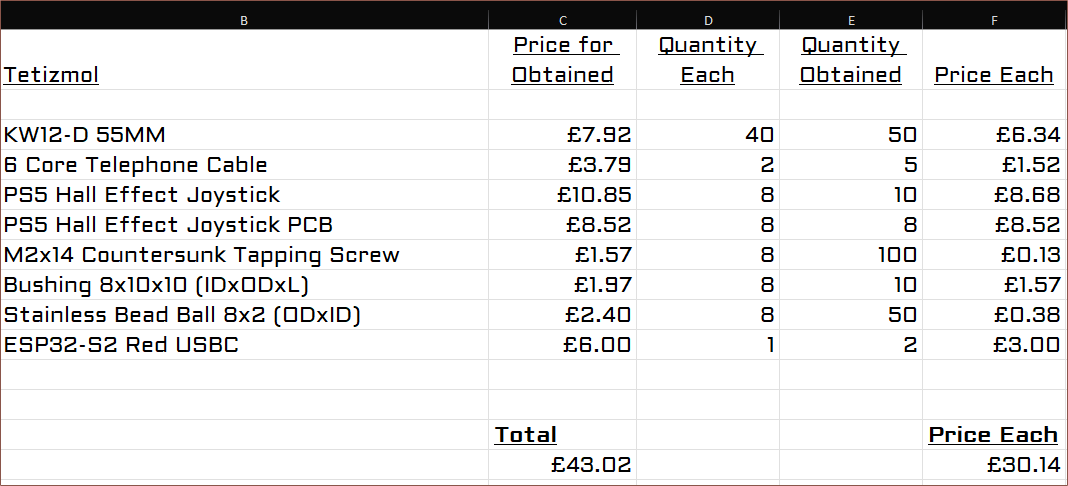
 They made the PCB available on ebay and it'll only be a one-time fee of about £9 to use the PS5 sticks:
They made the PCB available on ebay and it'll only be a one-time fee of about £9 to use the PS5 sticks: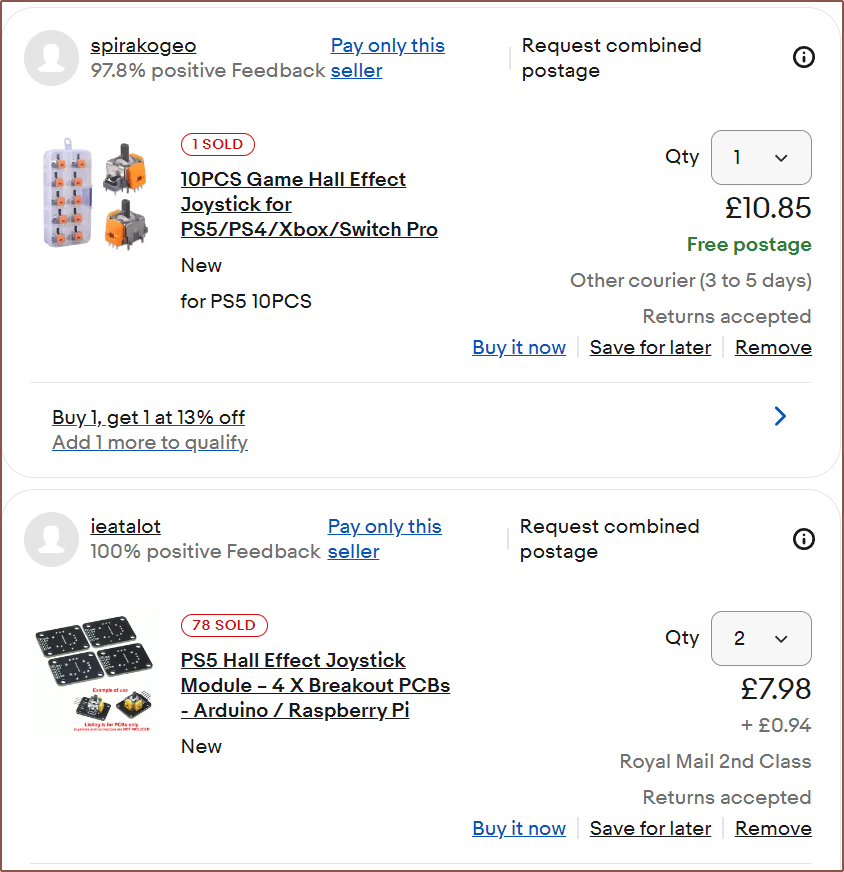
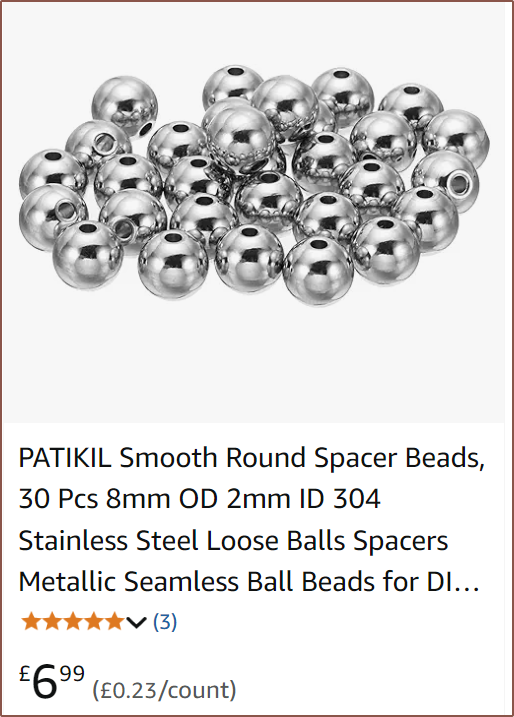
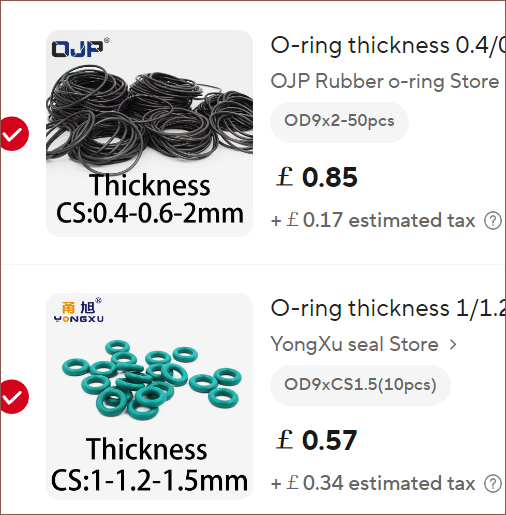
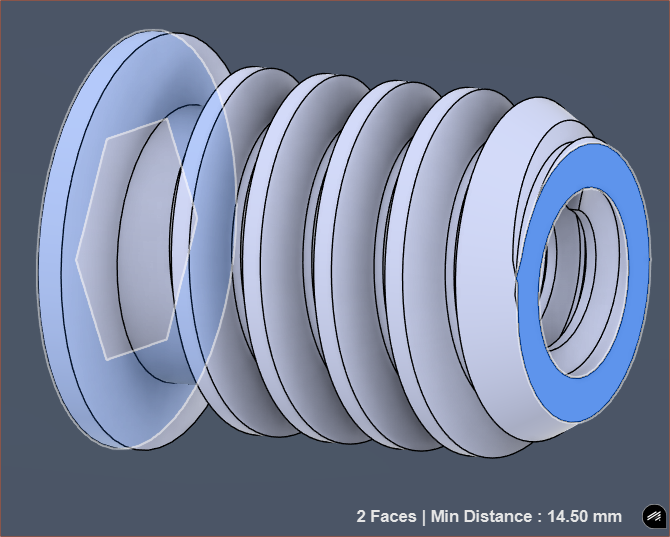
 In my search, I did also see acrylic and glass beads, but their roundness is likely questionable for this application. I may consider just printing using SLA printed ball ends for the joysticks.
In my search, I did also see acrylic and glass beads, but their roundness is likely questionable for this application. I may consider just printing using SLA printed ball ends for the joysticks.
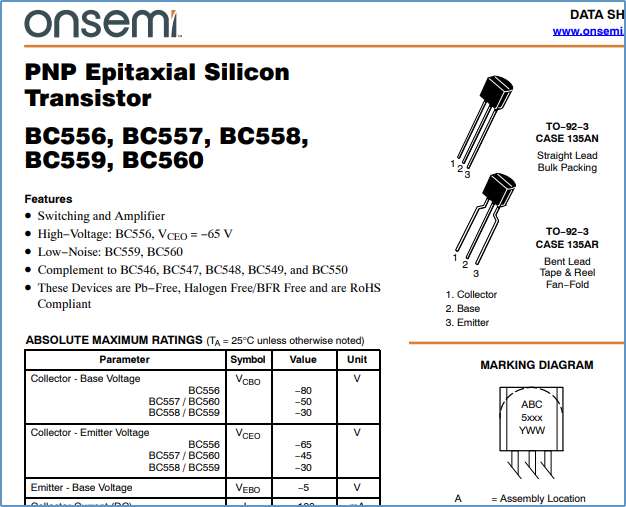
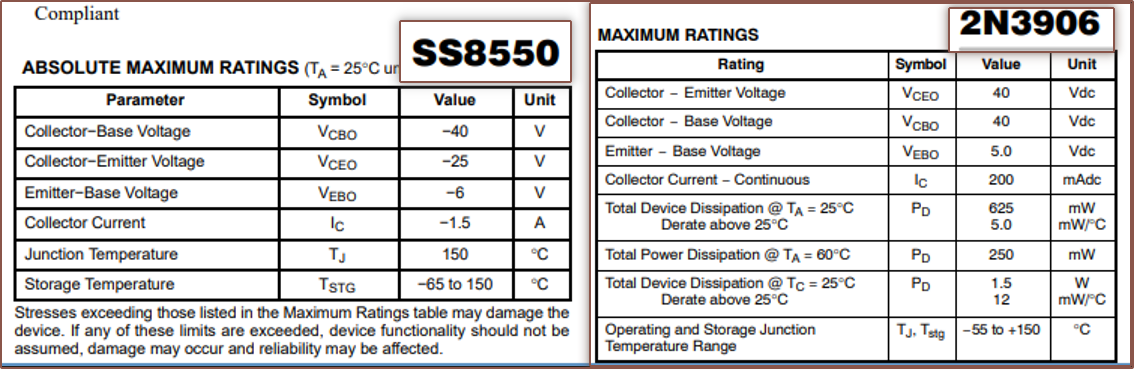 I did some looking into it and, from my understanding, I don't think that there would be any differences that should matter for this application. Hence I went back and the uni happened to have some 2N3906's that I proceeded to solder on:
I did some looking into it and, from my understanding, I don't think that there would be any differences that should matter for this application. Hence I went back and the uni happened to have some 2N3906's that I proceeded to solder on: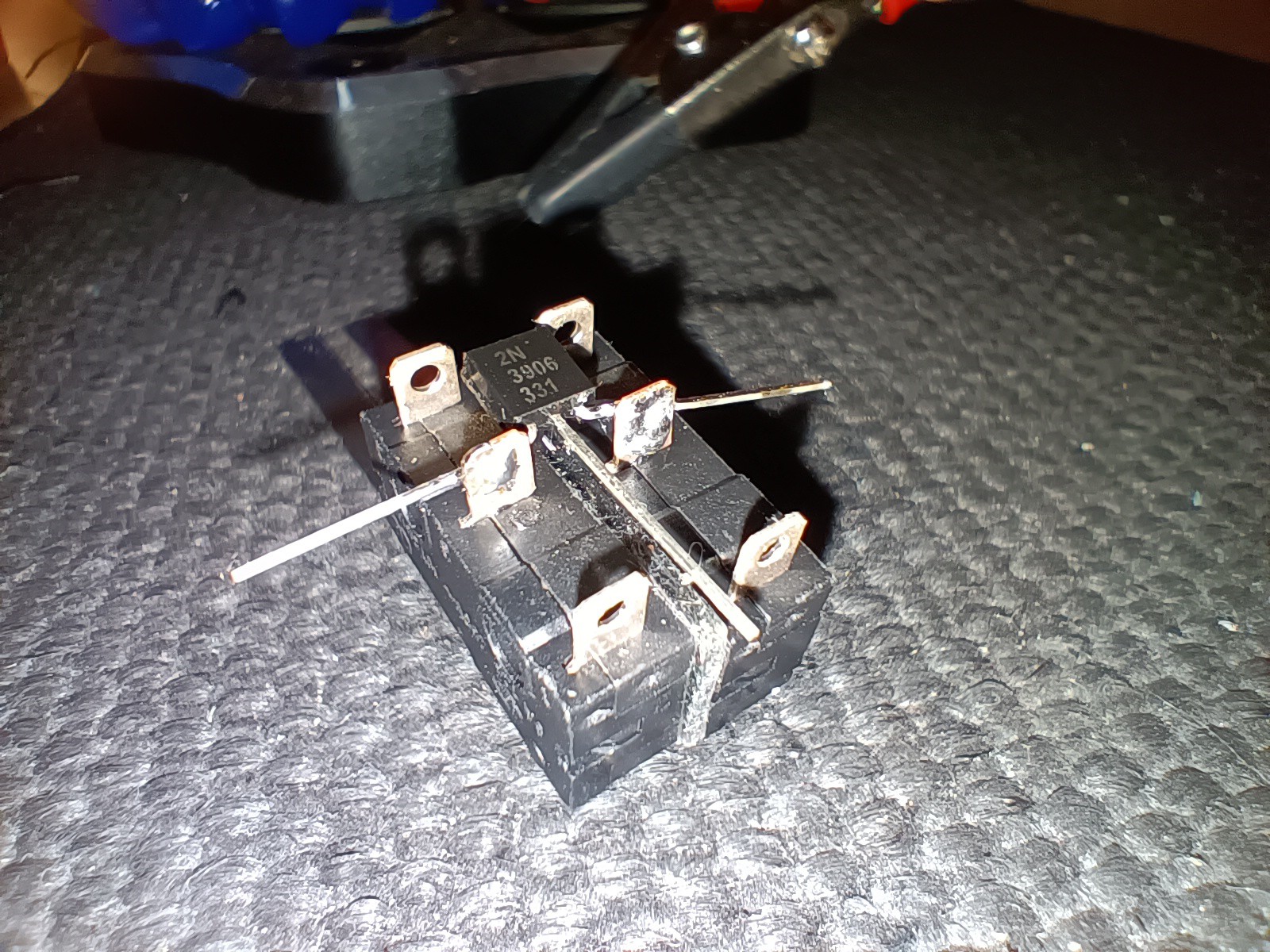
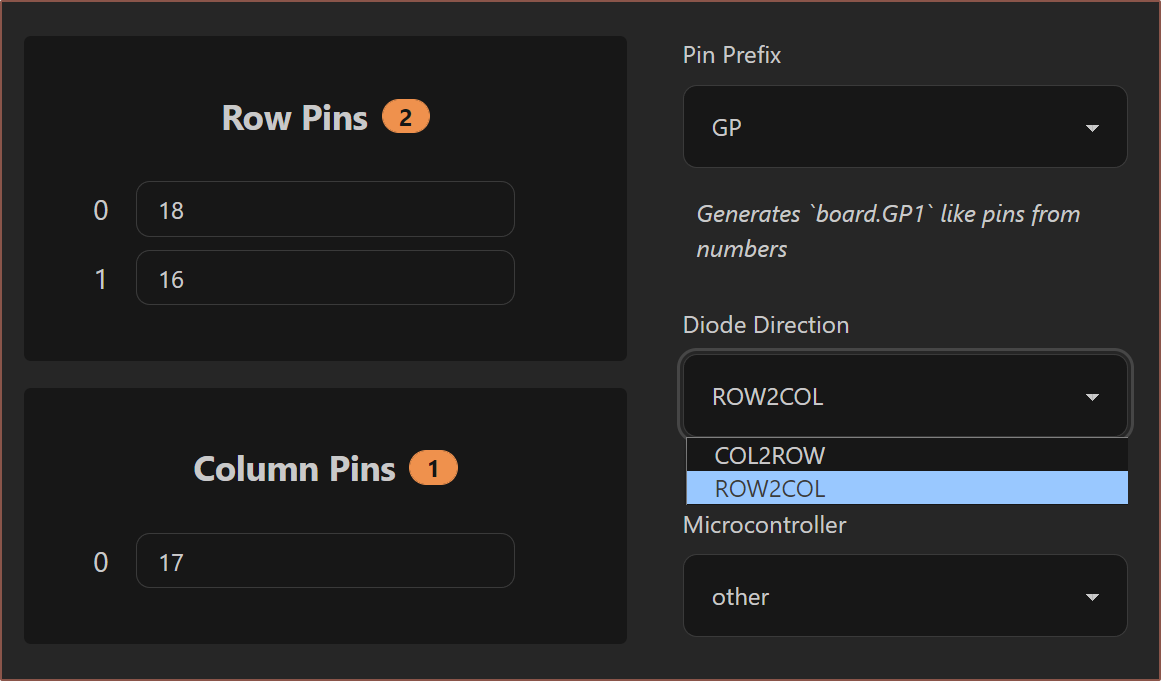

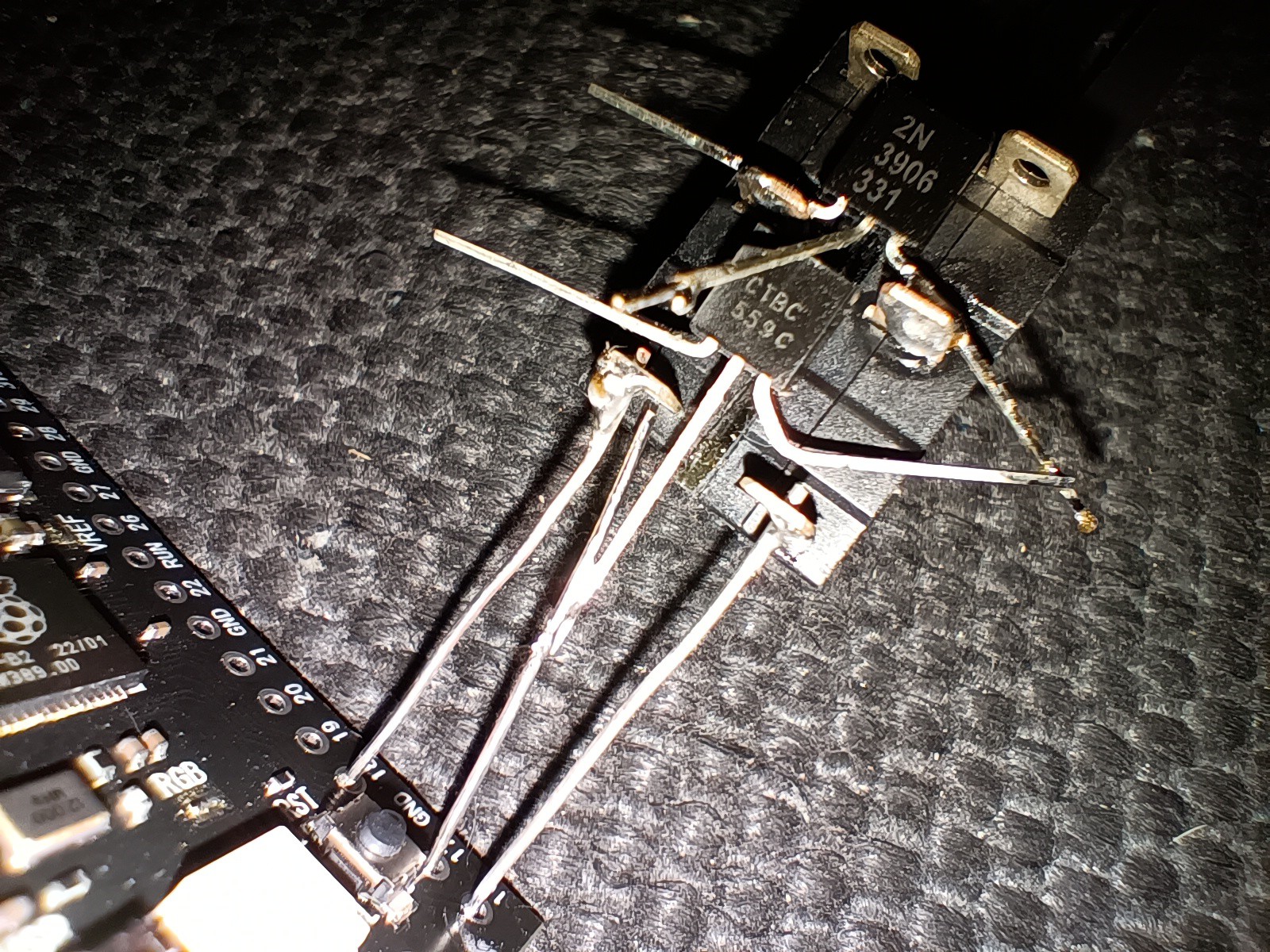
 Opened Pog again to check settings, changed the diode orientation to COL2ROW and saved:
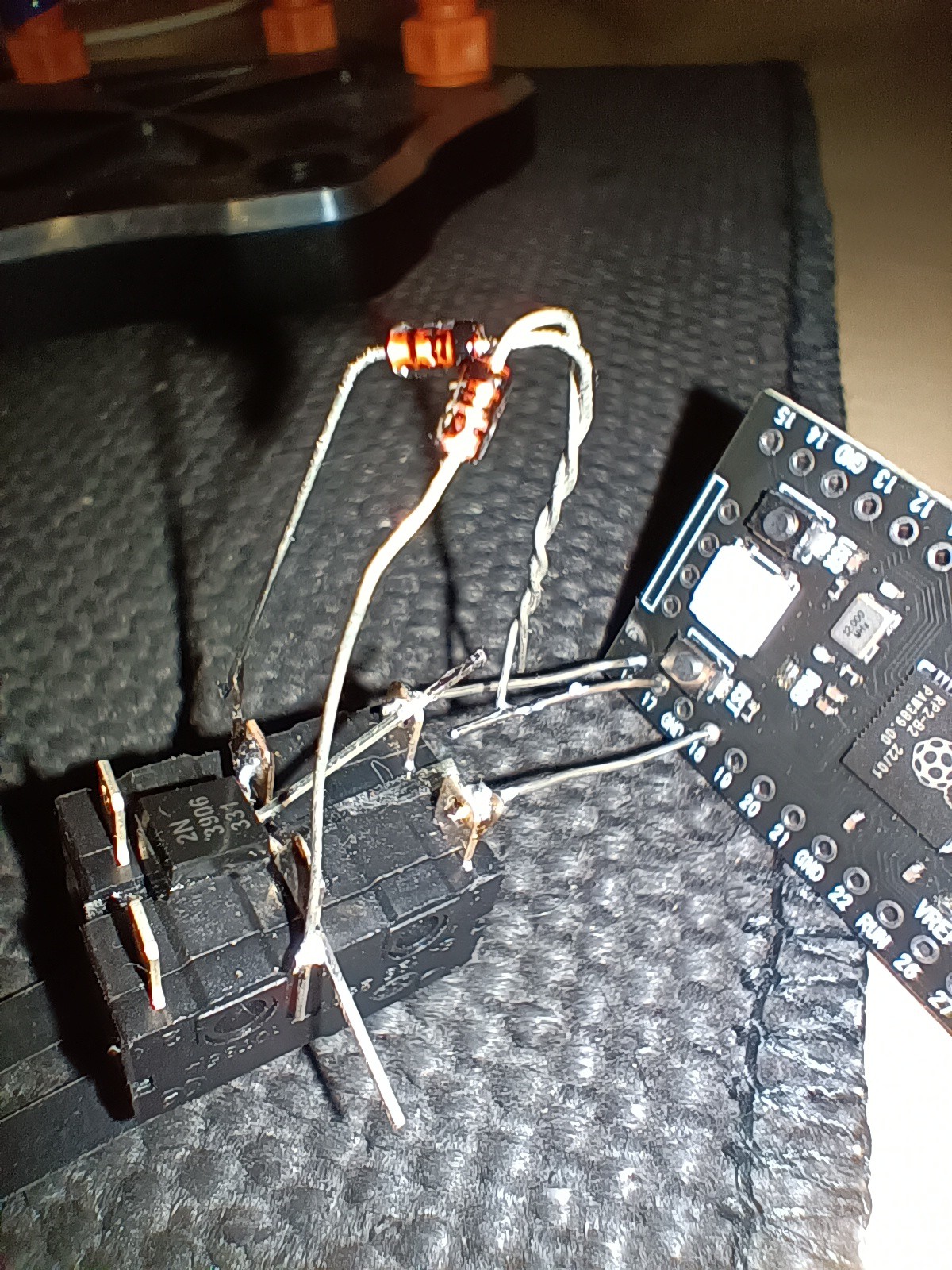
Opened Pog again to check settings, changed the diode orientation to COL2ROW and saved: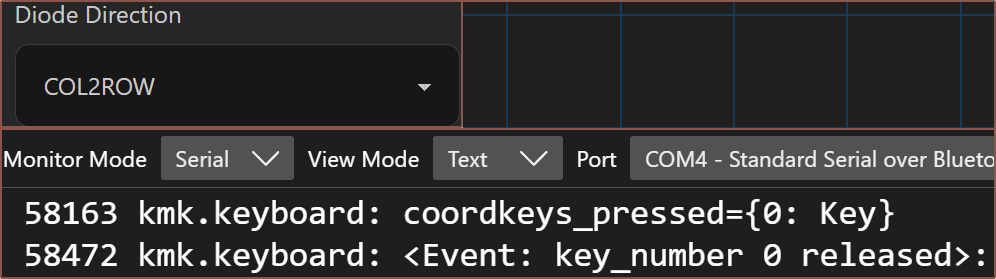 So now I have a configuration I know works, so I desoldered the diodes and soldered the 3rd pin for the 2N3906:
So now I have a configuration I know works, so I desoldered the diodes and soldered the 3rd pin for the 2N3906: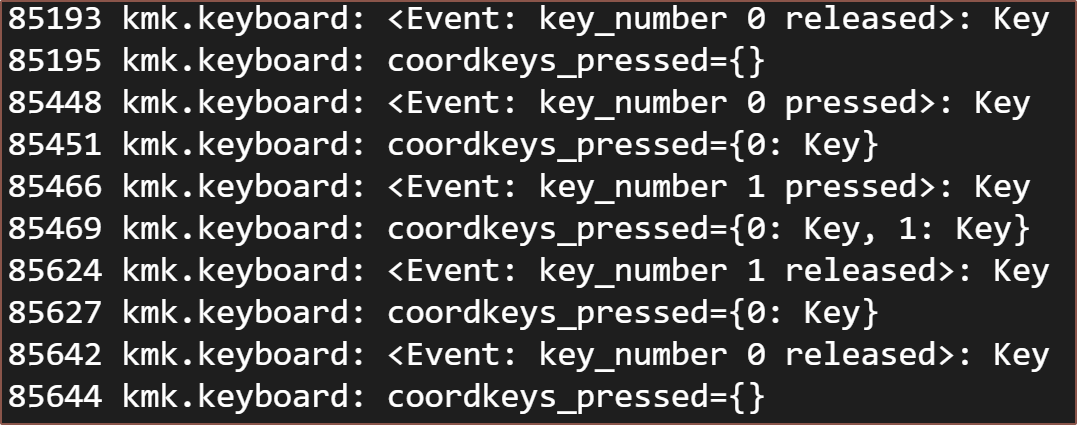
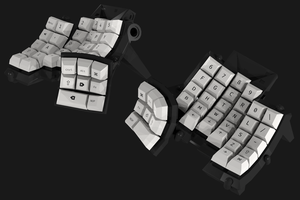
 I tried printing the keycaps as-is and a modification that has more surface area to see if they'd stick better. I think it's best to go with the original profile but use a raft. Due to the print orientation, they're somewhat grippy, which I believe is a positive as it should make it easier to press multiple keys with confidence.
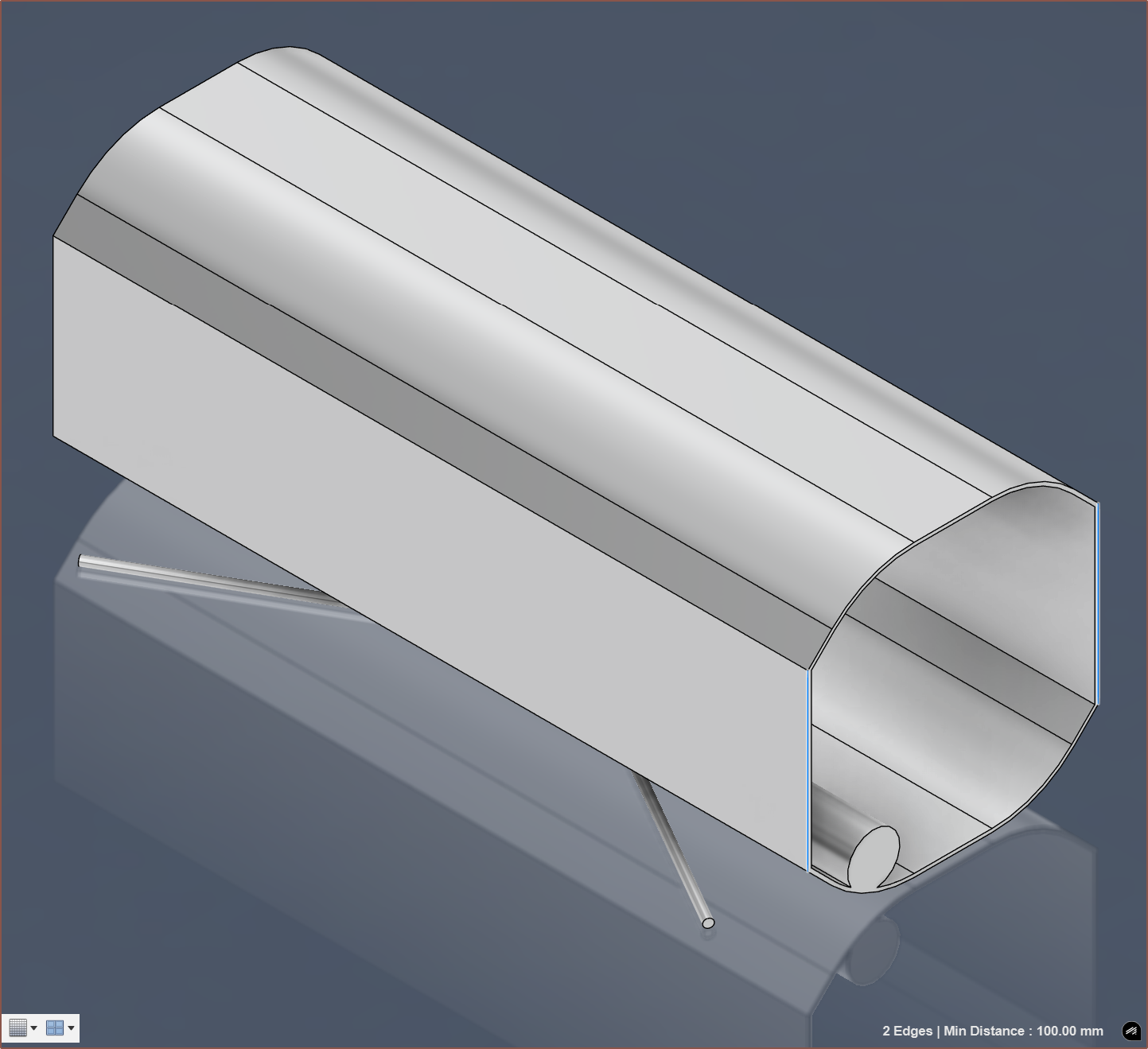
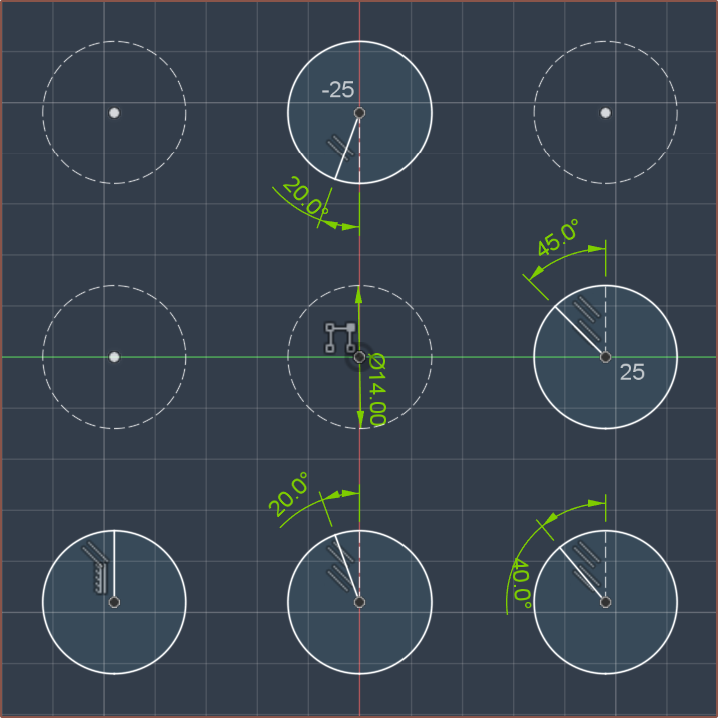
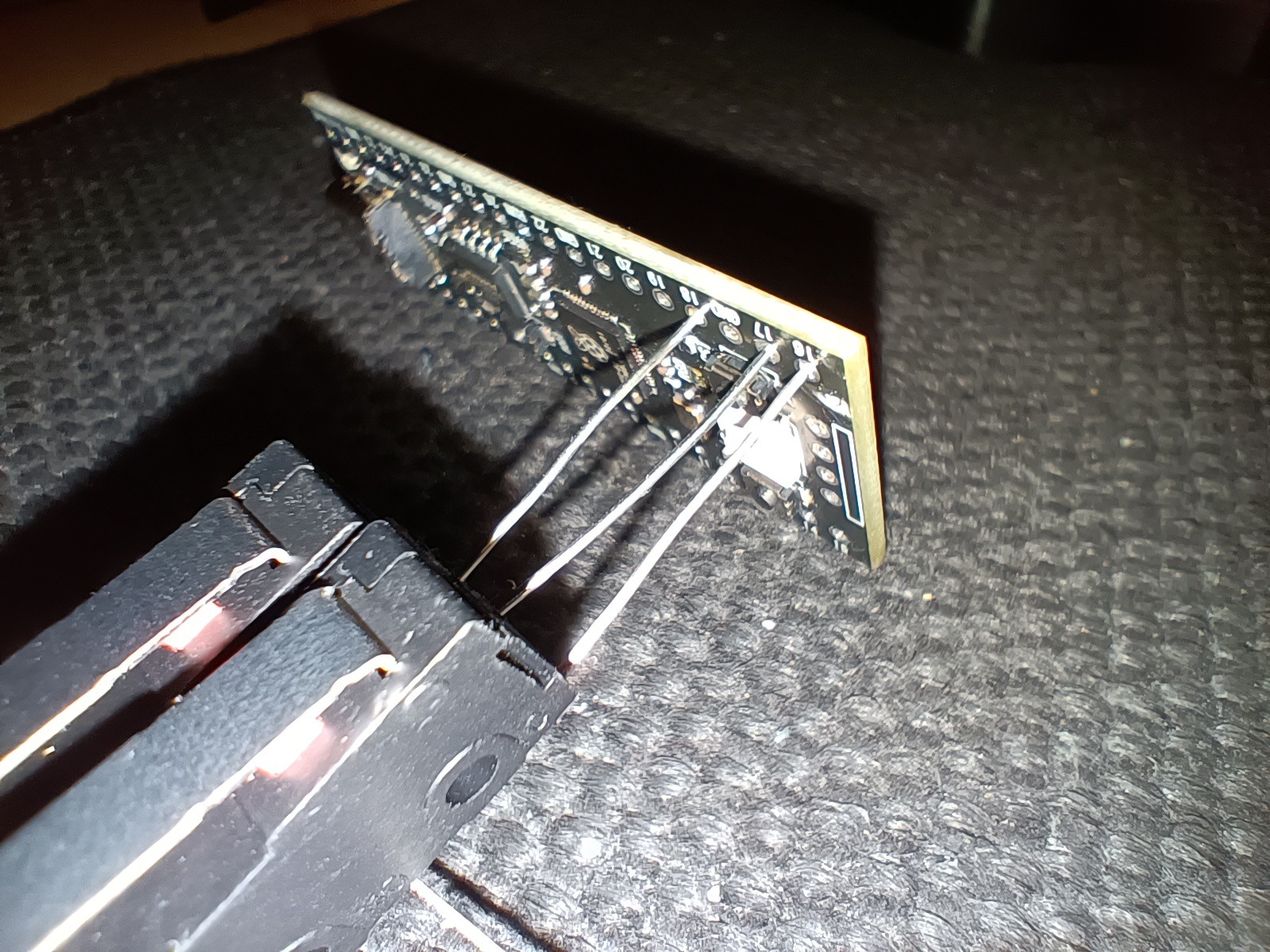
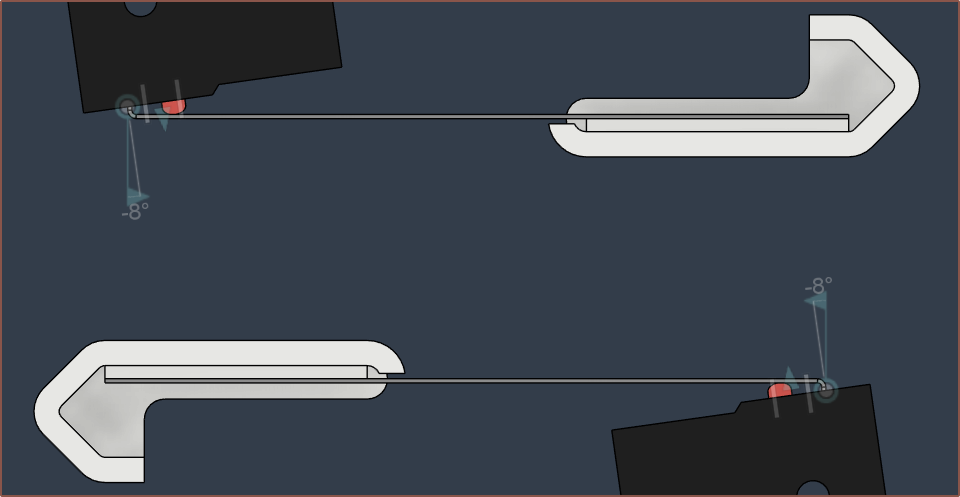
I tried printing the keycaps as-is and a modification that has more surface area to see if they'd stick better. I think it's best to go with the original profile but use a raft. Due to the print orientation, they're somewhat grippy, which I believe is a positive as it should make it easier to press multiple keys with confidence.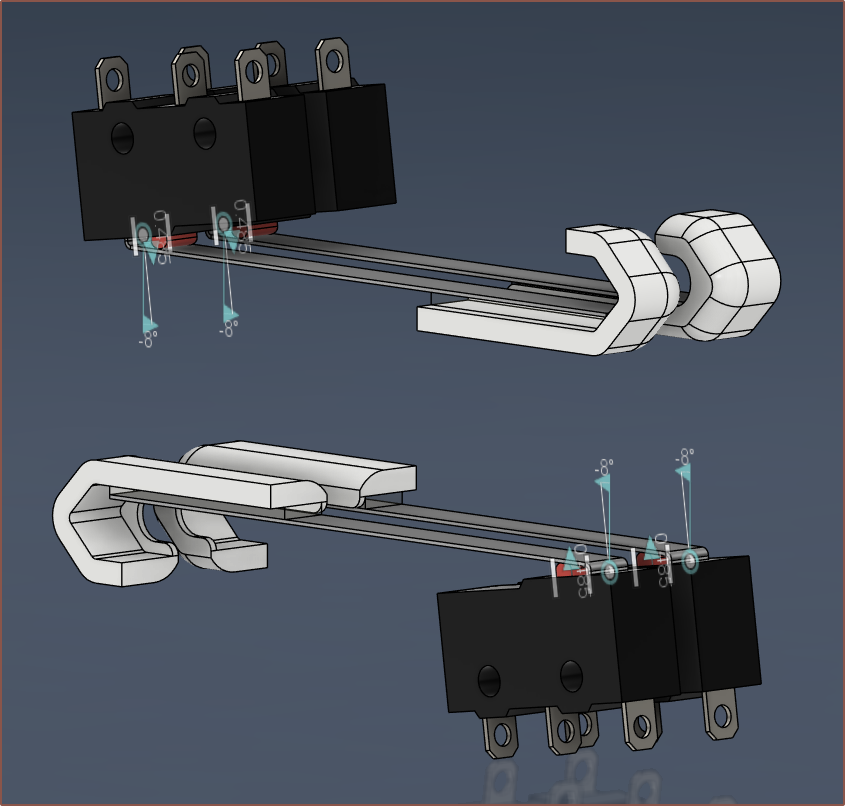 To avoid the nail for the top switches whilst also avoiding the fingertip hitting the wrong end of the bottom switches, I've come up with this solution.
To avoid the nail for the top switches whilst also avoiding the fingertip hitting the wrong end of the bottom switches, I've come up with this solution.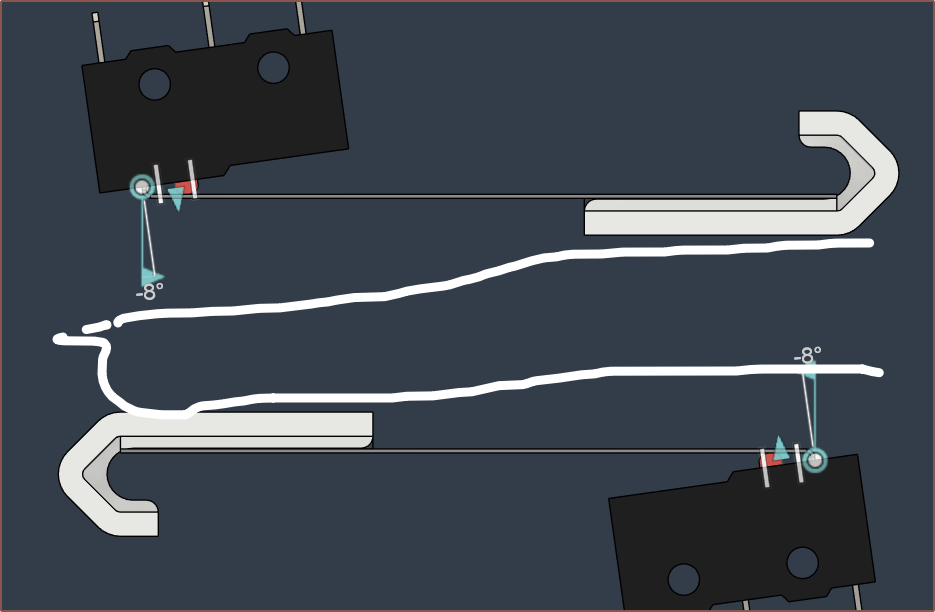



 David H. Bronke
David H. Bronke
 Simon Merrett
Simon Merrett
Fun hack! The height seems like kind of a challenge, but I love anything that explores the frontier of what's possible with unusual finger and key configurations.
Do you have any pics of how you envision this in use? I've messed around with more N/S split key orientations on Svalboard prototypes, but haven't convinced myself of sufficient dexterity in the ring and pinkies especially -- the lateral movements on DH/Sval are not so difficult, as they're aided by wrist mobility and some specialized nuances of fit as well.
Anyway, super interested to see how this shapes up for you. Nails are a challenge in so many different input contexts -- nails vs capacitive touch can be a real struggle!