 Colin M
Colin MMackerel-08
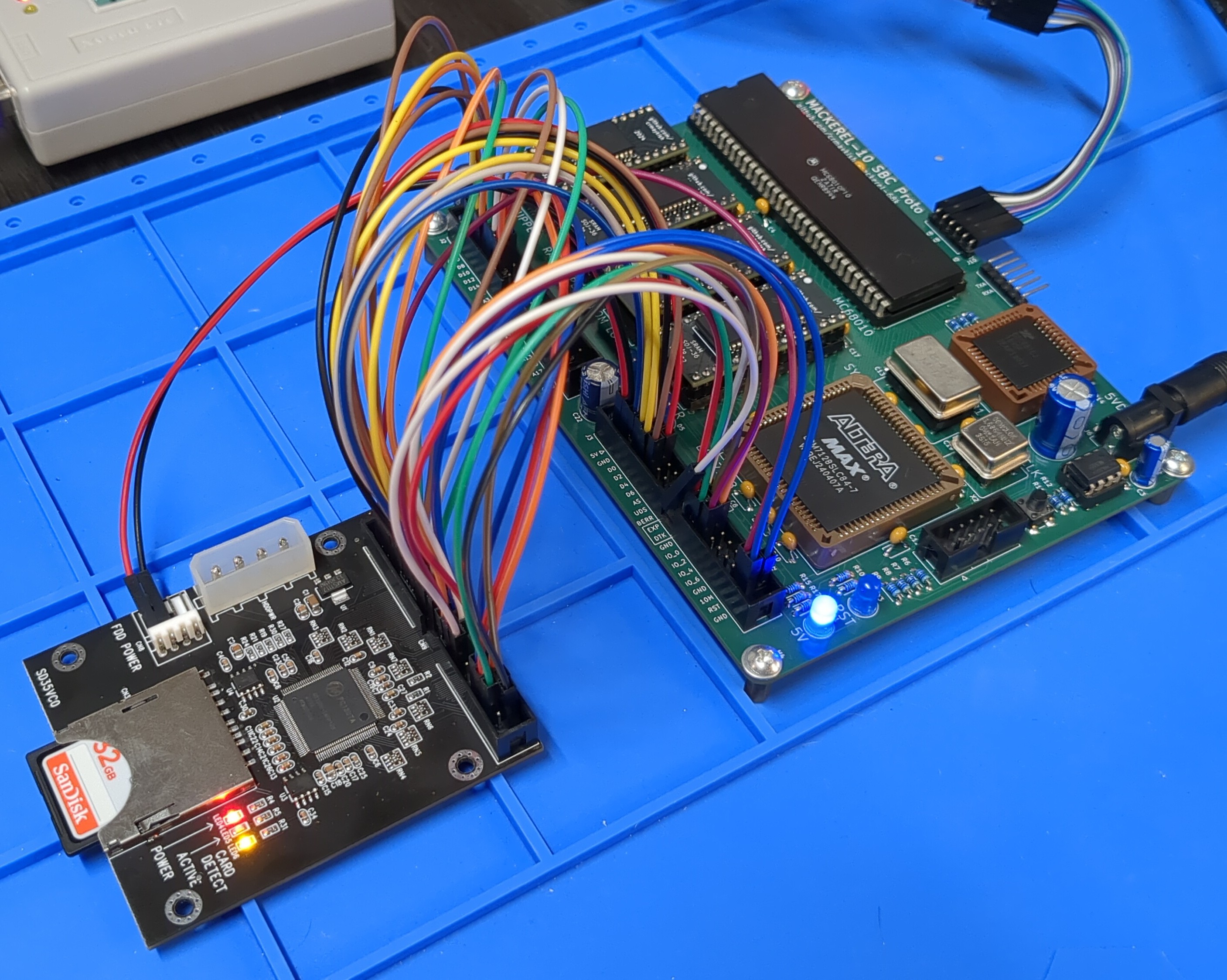
Based on the original prototype hardare, this SBC combines the 52-pin PLCC MC68008, a 512KB EEPROM, up to 3.5MB of SRAM, and a XR68C681 DUART on a single PCB. The DUART exposes two serial ports and three bit-banged SPI headers. One of these headers is currently used with an SD card breakout board to provide bulk storage to the system.
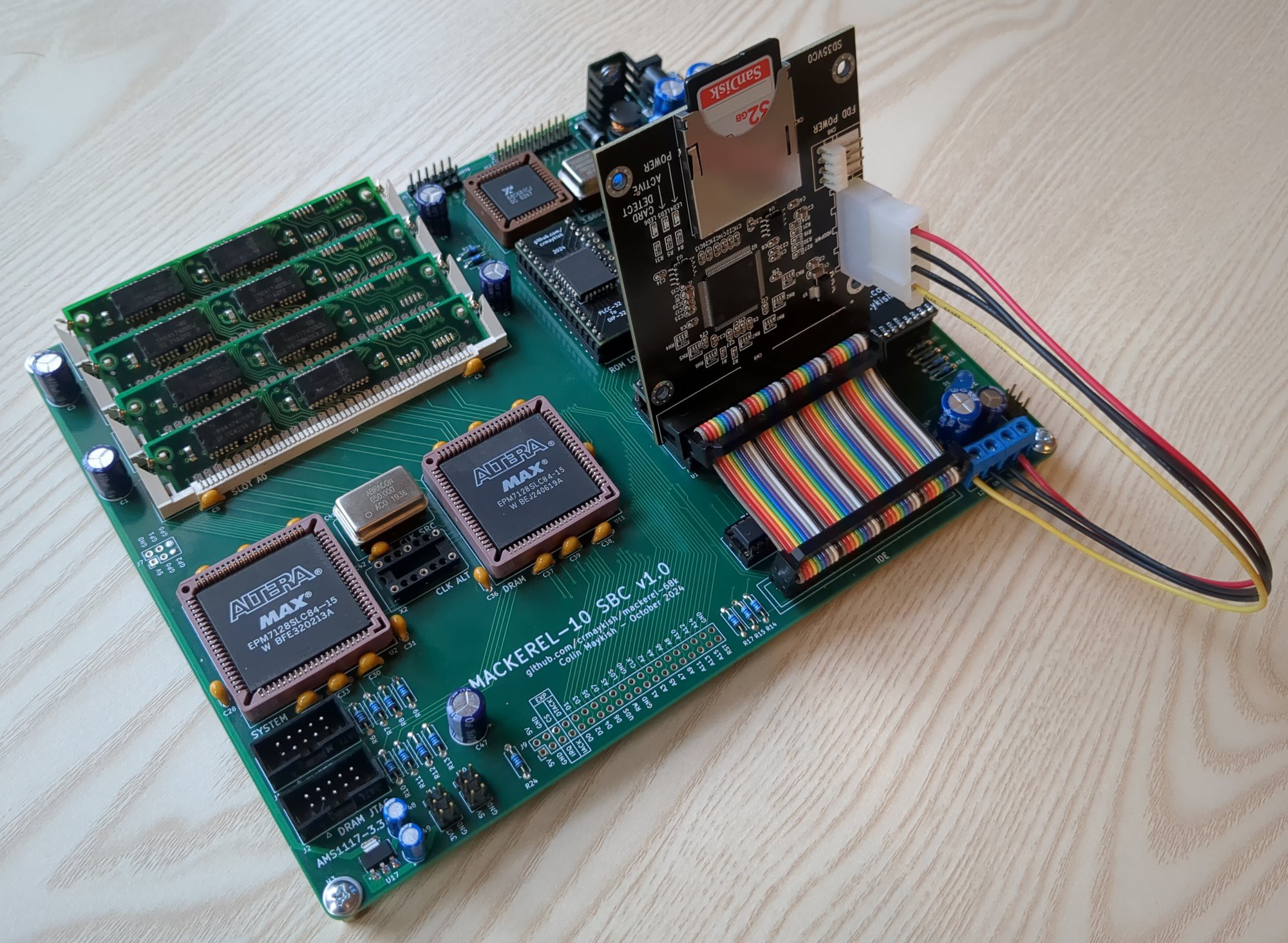
Mackerel-10
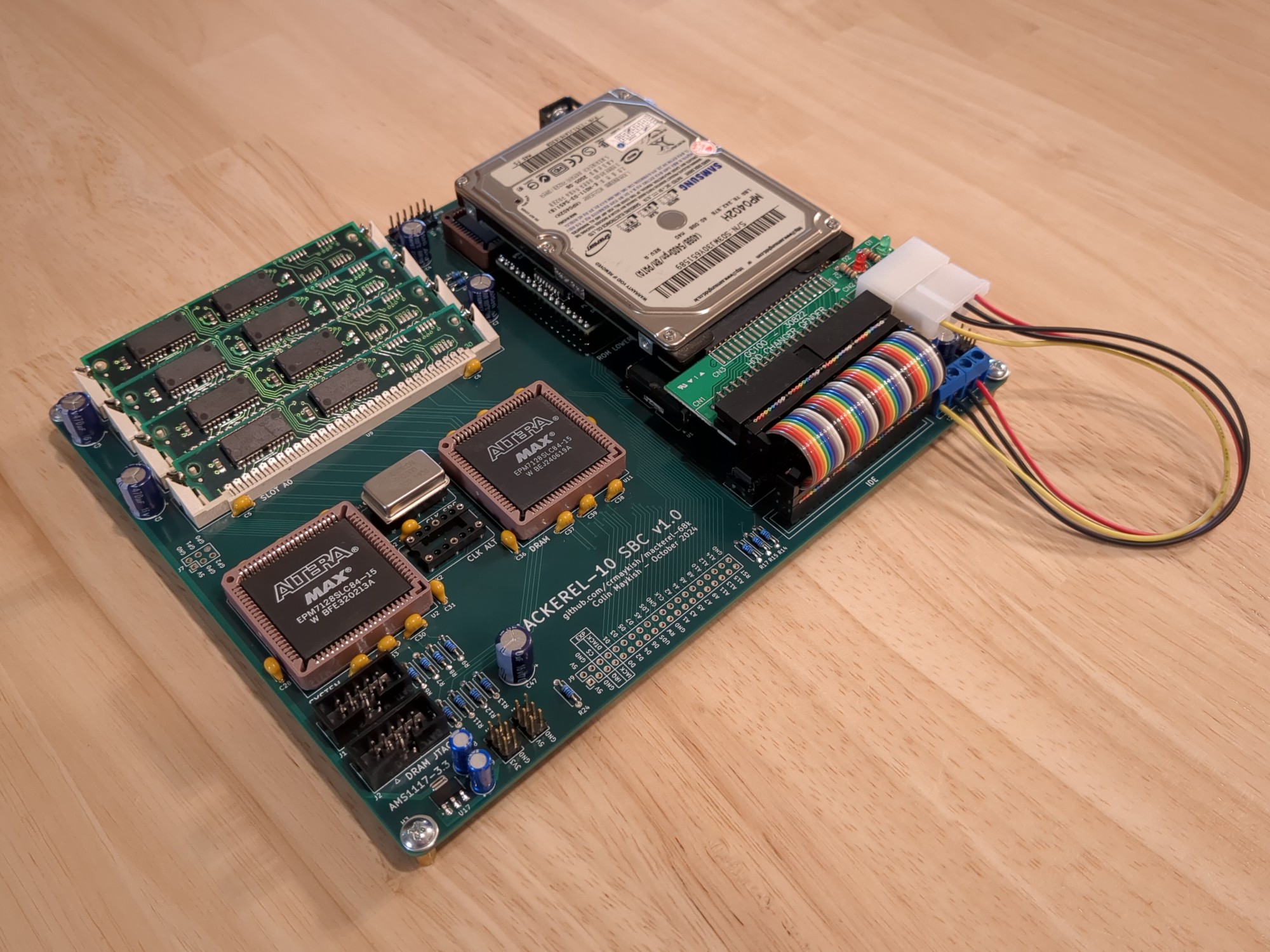
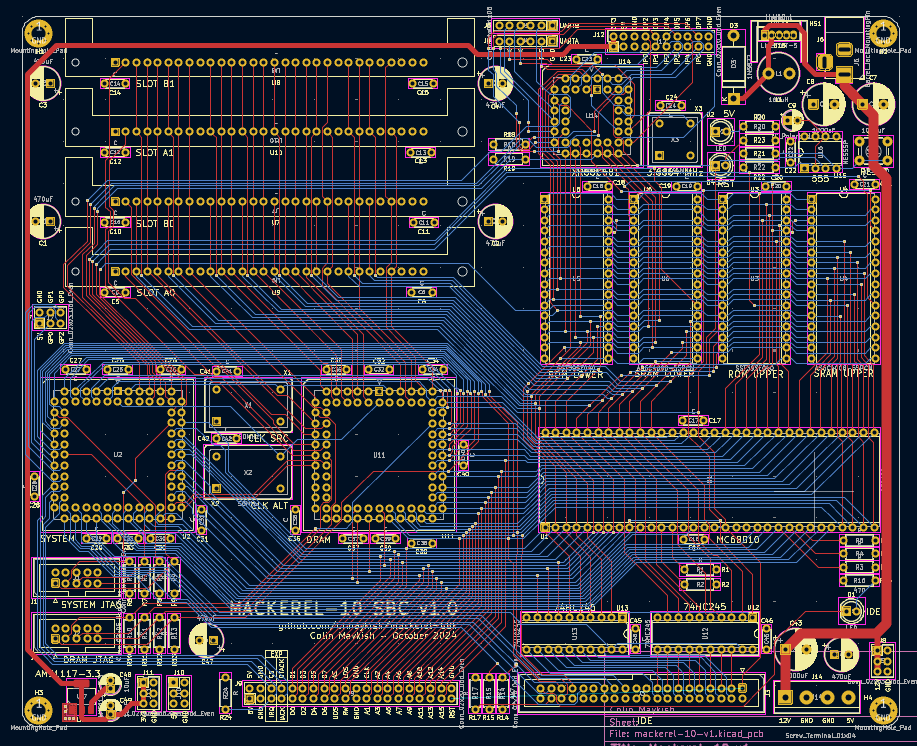
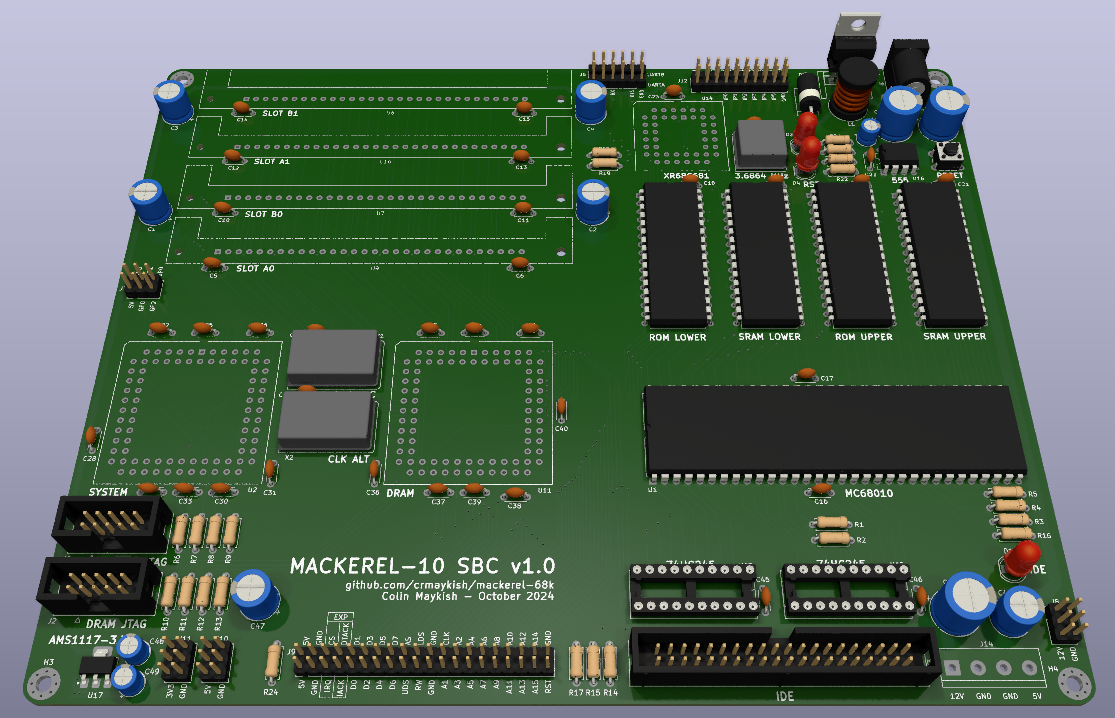
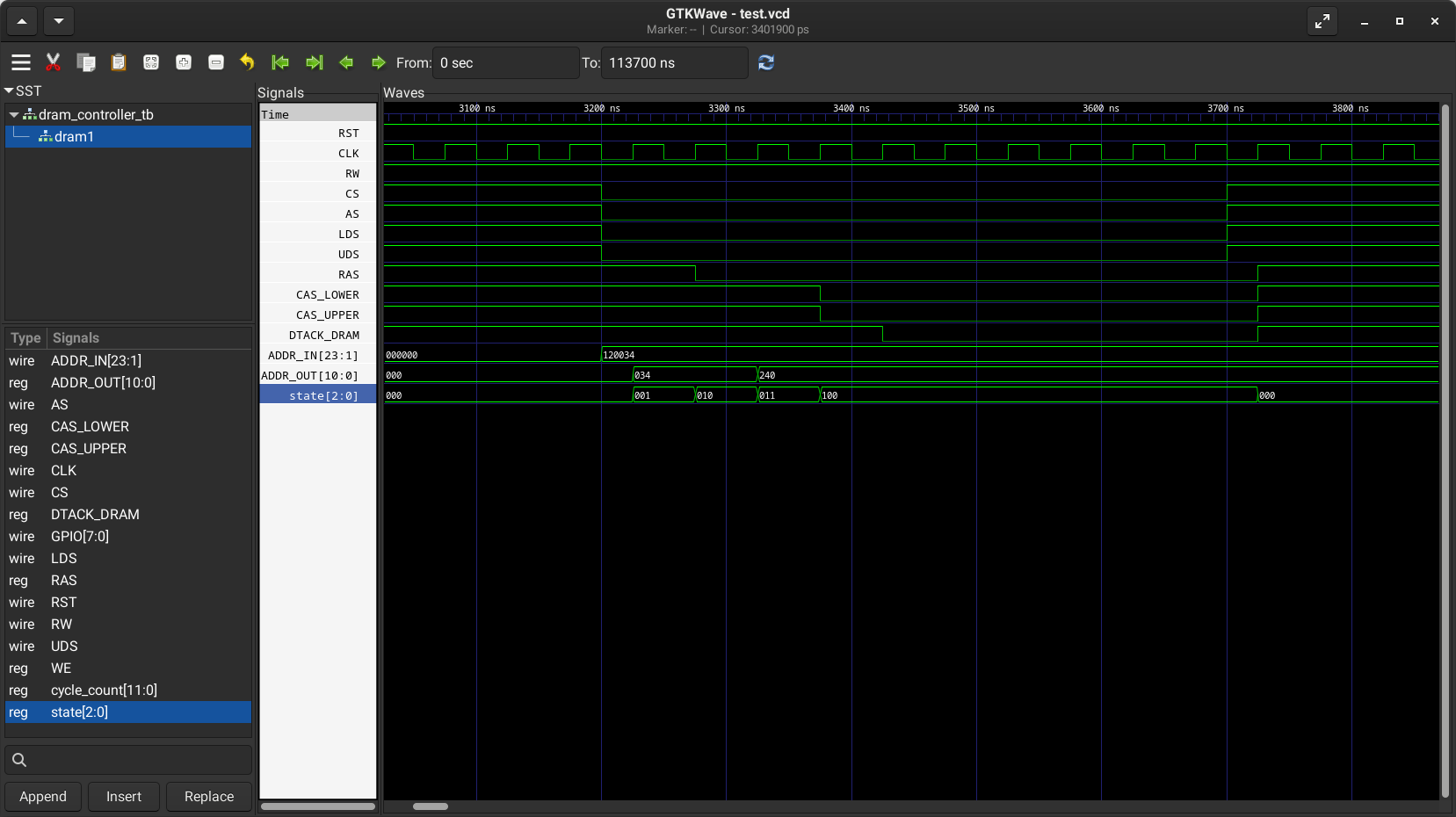
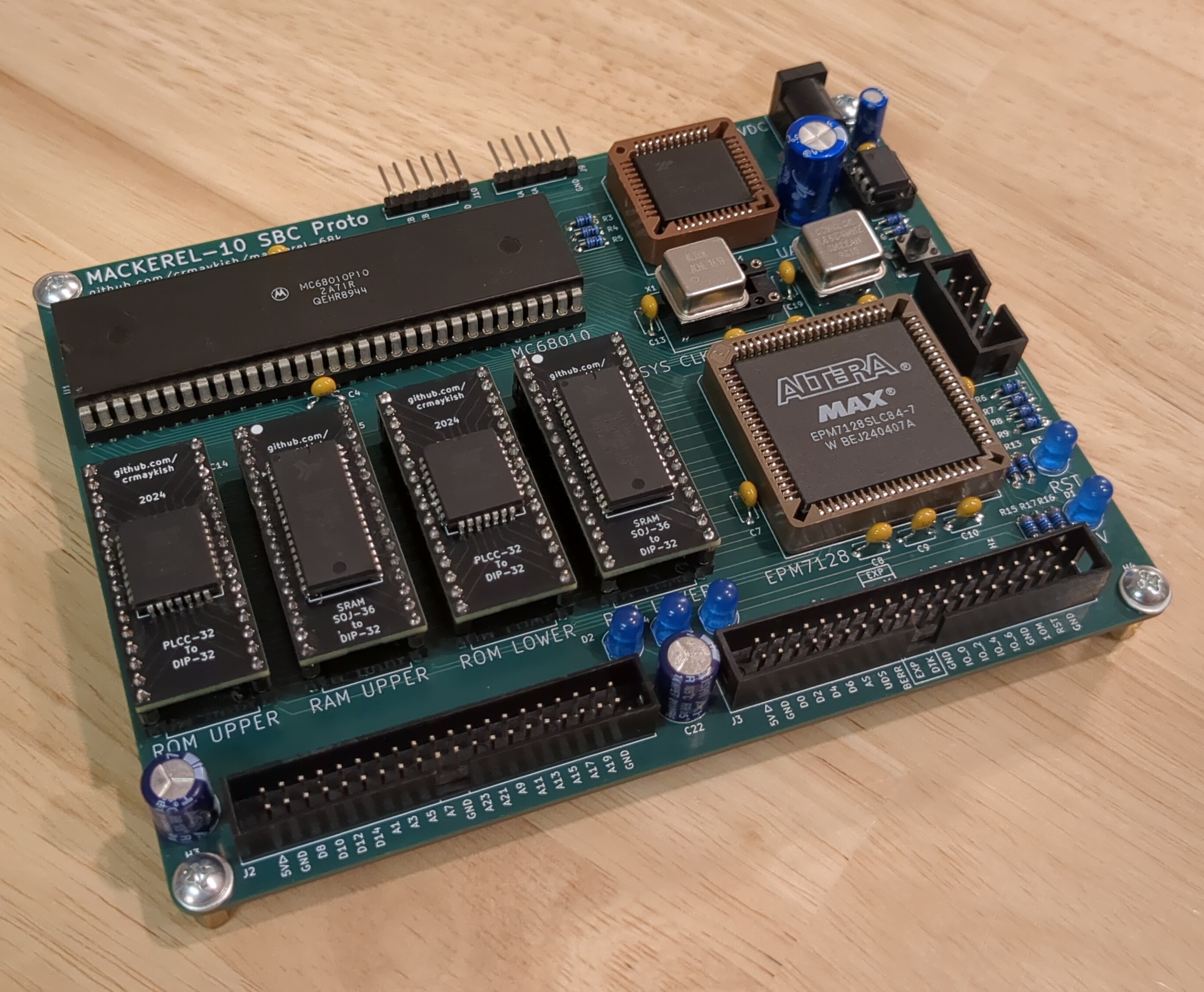
Mackerel-10 is the second phase of the project, It expands the design of Mackerel-08 with a 68010 CPU and 16-bit databus. Additionally, it increases the memory capacity with a DRAM controller implemented in a CPLD and up to 16 MB of 30-pin SIMM DRAM. An IDE header allows a hard drive or CF card to be connected as persistent storage.
Mackerel-30
Based on the fully 32-bit 68030, Mackerel-30 adds a MC68882 floating point unit, 64 MB of 72-pin DRAM and support for modern Linux.


















 Tobias Rathje
Tobias Rathje
 Jason Westervelt
Jason Westervelt

 Tom
Tom
What speed are the 22v10c parts, on your BOM you left off the speed