 pat92fr
pat92frBuild instructions in video :
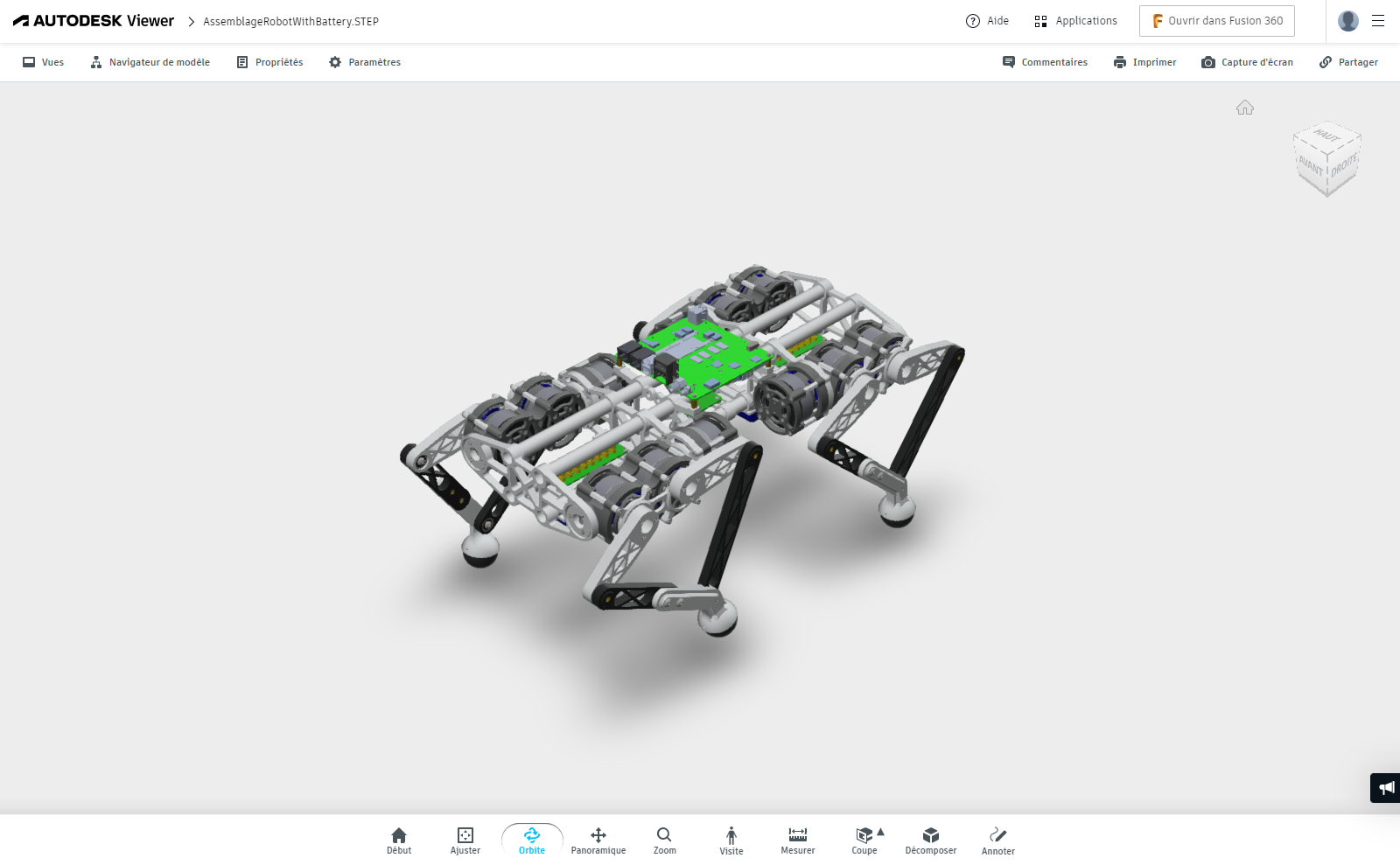
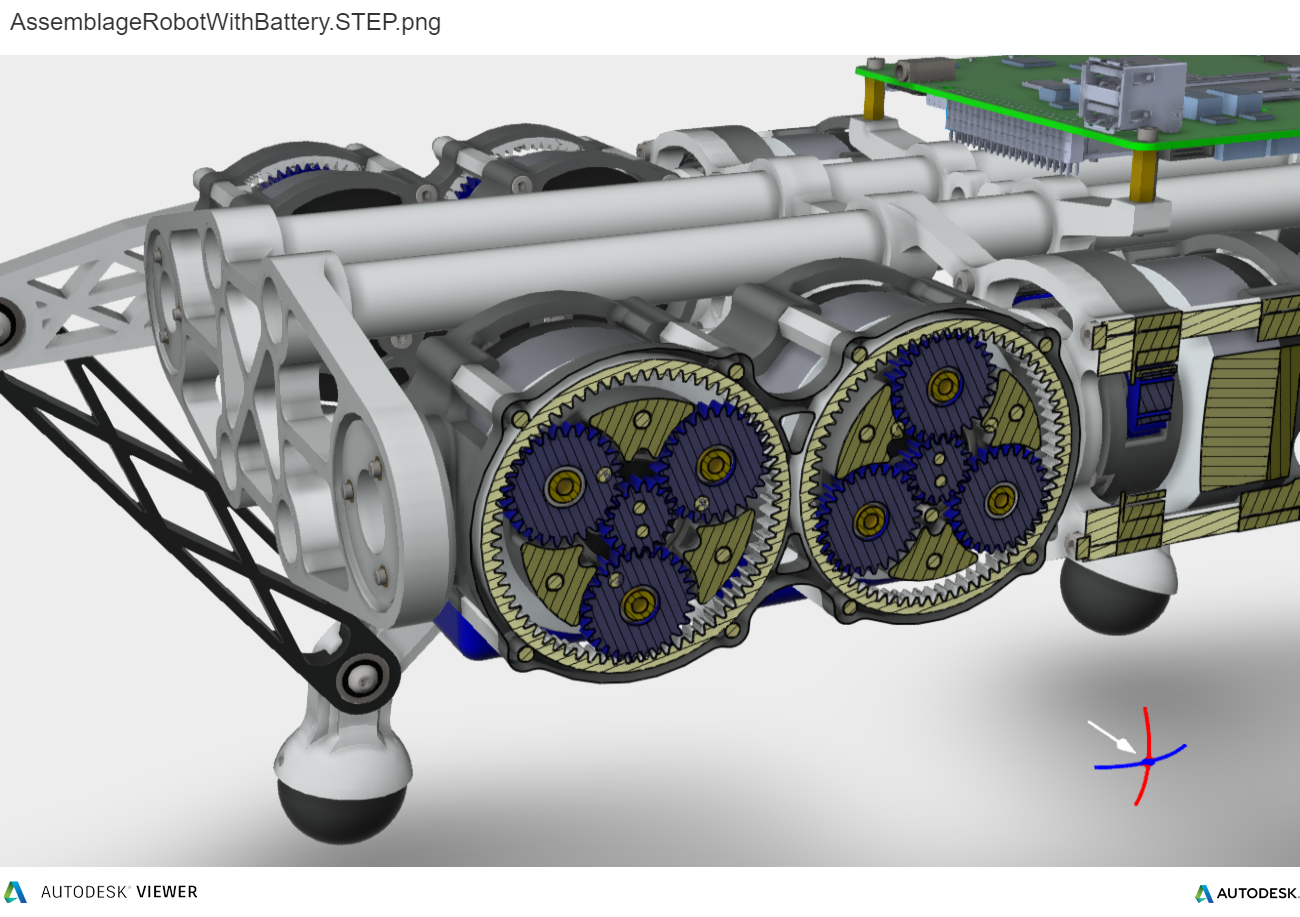
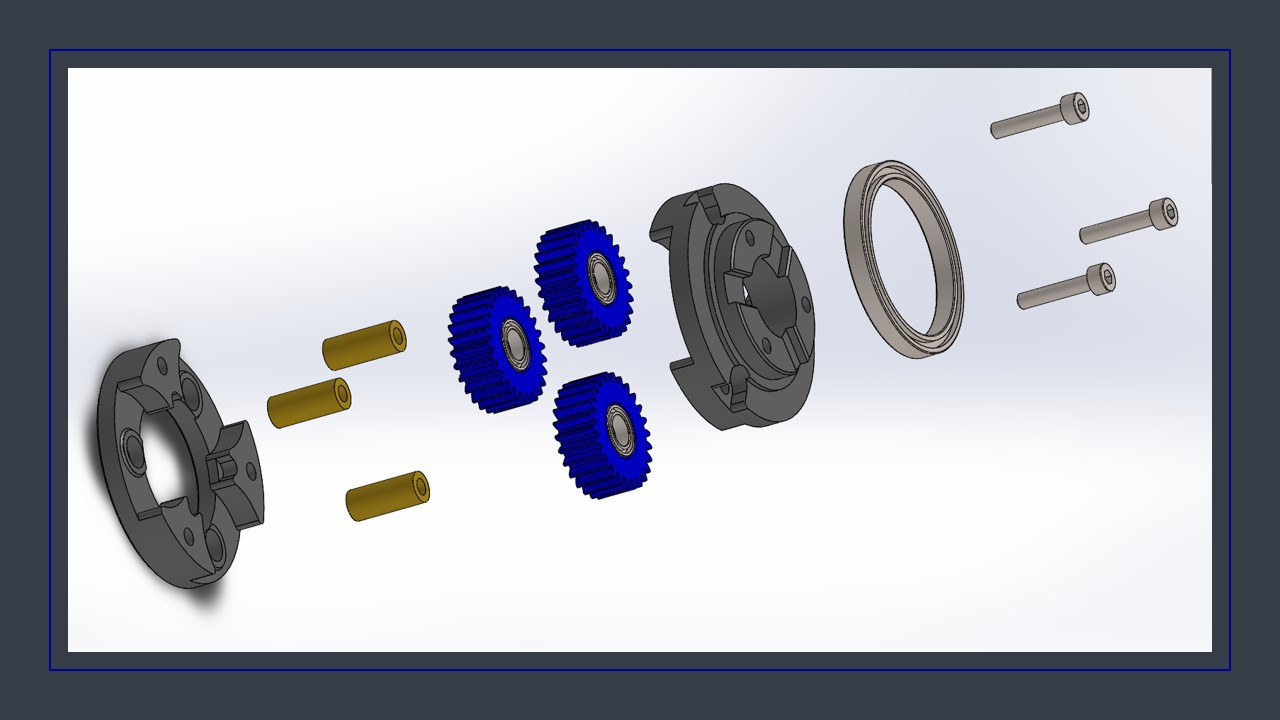
Mechanical design viewer : https://autode.sk/3qW5eA4
ESC Firmware :
Actuators based on project: "Ultra low-cost controller for brushless servo based on the B-G431B-ESC1 Discovery kit by ST" : https://hackaday.io/project/177578-b-g431b-esc-brushless-servo-controller
Custom Firmware for ST Discovery Kit B-G431B-ESC1 may be downloaded from git : https://github.com/pat92fr/BrushlessServoController
ROS node :




 Tim Wilkinson
Tim Wilkinson
 ssla-couk
ssla-couk
 Raspibotics
Raspibotics
 ensafatef
ensafatef
why did you design the leg like a chain of link, not like mit cheetah.
What is the benefit for design like that.